動力總成駕駛性客觀評價的工況優(yōu)選方法與試驗驗證*
2021-04-14 10:30:24過學迅裴曉飛張成才夏佳磊
汽車工程 2021年3期
周 維,過學迅,裴曉飛,張成才,嚴 軍,夏佳磊
(1. 武漢理工大學,現代汽車零部件技術湖北省重點實驗室,武漢 430070;2. 武漢理工大學,汽車零部件技術湖北省協(xié)同創(chuàng)新中心,武漢 430070;3. 東風汽車公司技術中心動力總成開發(fā)部,武漢 430058)
前言
車輛駕駛性已成為國內外整車制造廠關注和研究的熱點。其中,動力總成駕駛性可通過分析駕駛員輸入與車輛縱向狀態(tài)響應的關系,進行迭代優(yōu)化[1-2]。主觀評價可以獲取精度較高的分析結果,但同時存在耗時多、成本高,且必須由專業(yè)駕駛員操作的不足;因計算機仿真對高頻振動的預測能力有限,常通過分析融合多源傳感器信號的客觀評價方法對主觀評價進行彌補,以獲得駕駛員不易察覺的系統(tǒng)信號[3]。
近些年,國內外對車輛的客觀評價指標和評價體系做了大量工作。其中AVL 公司的List 等[4]和Peter 等[5]設計了用于預測油耗、排放和駕駛性的測試臺架,并結合仿真分析和主觀評價實現了車輛的駕駛性實時評價。Ricardo 公司的Dorey 等[6]開發(fā)了車載數據采集系統(tǒng),并通過自動分析工具將主觀評價與測量值進行關聯,以協(xié)助工程師對車輛進行調校和改進。Chandrasekaran等[7]和Shin等[8]分別對緊湊型SUV 和混合動力汽車的駕駛性進行了研究,但用于評價駕駛性的RMS、VDV、延遲和加速度峰值等特征量卻仍然保留。雷雨龍等[9]結合車輛駕駛性與舒適性評價體系提出理想換擋過程的概念。章桐等[10]以舒適性和瞬態(tài)響應為特征值構建了駕駛性客觀評估體系。黃偉等[11-12]提出了爬行工況和起步工況駕駛性品質的評價體系,并結合主觀評價和網絡層次分析了評估權重,為后續(xù)主客觀一致性的評估提供指導。但上述大部分研究僅對單一工況進行分析,且用于車輛駕駛性評價的特征指標未能反映駕駛員的真實感受,主客觀一致性較差,不利于動力總成駕駛性的評估和修正。
選擇合理且系統(tǒng)的駕駛性評價工況,既可以克服評價工況不完整,難以全面反饋車輛狀態(tài)的問題,又能避免測試的工況冗余導致的資源浪費和開發(fā)周期過長的不足。目前,對車輛駕駛性評價工況的選擇,多依據主觀經驗豐富的測試工程師制定[13]。文獻[14]和文獻[15]中將駕駛性評價工況分為靜態(tài)、穩(wěn)態(tài)和瞬態(tài)3 類測試工況,總共包含起動、蠕行、靜態(tài)換擋、怠速、起步、猛踩油門(Tip-in)、急松油門(Tip-out)、勻速、定油門升擋、滑行減速、制動減速和熄火等12 種工況,缺少工況的重要性權重分析,不利于系統(tǒng)而有效地判斷車輛的駕駛性,從而未能快速調節(jié)控制邏輯和參數,實現車輛動力性和舒適性的協(xié)同優(yōu)化。
本研究首先借鑒文獻[16]和文獻[17]中建立的評價體系,參考車輛研究的高校和企業(yè)專家建議構架駕駛性綜合評價體系,然后基于組合賦權思想采用層次分析法(AHP)和變異系數法(CV)確定的主客觀權重,再用加權馬氏距離替代歐氏距離的改進逼近理想解排序(TOPSIS)搭建車輛駕駛性評價工況優(yōu)選模型。最后,以靜態(tài)換擋工況為例進行實例研究,分析其細分工況的加權指標值,結合先驗知識驗證改進的AHP-CV-TOPSIS 模型的準確性和可靠性。
1 動力總成客觀駕駛性評價體系
假設車輛實際行駛的道路坡度角為0°,考慮車輛在縱向行駛時的驅動力和行駛阻力,建立動力總成動力學模型的運動方程:
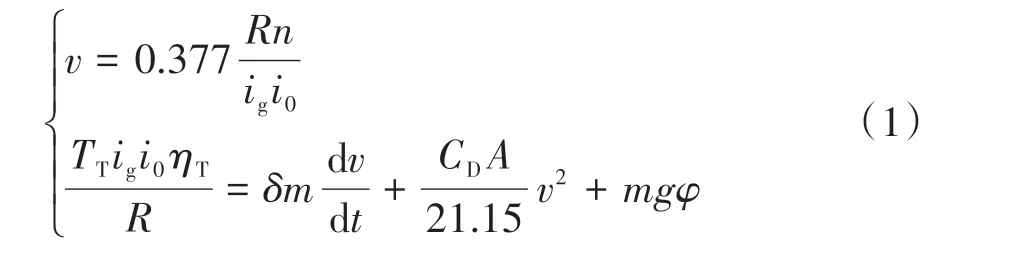
式中:m為車輛總質量;v為車速;R為車輪半徑;n為發(fā)動機轉速;ig為變速器傳動比;i0為主減速器傳動比;TT為發(fā)動機轉矩;ηT為傳動效率;δ為車輛旋轉質量換算系數;CD為空氣阻力系數;A為迎風面積;φ為滾動阻力系數。
根據式(1)可知,動力總成駕駛性可通過分析發(fā)動機轉速、發(fā)動機轉矩、變速器擋位、車速、動力傳遞效率和車輛加速度等評價參數獲得。其中,對于濕式DCT 變速器,因傳動效率僅與油溫和擋位有關,且變化范圍較小,根據傳遞效率MAP圖,取92%。
參照東風公司4 位經驗豐富的標定工程師和武漢理工大學3 位車輛工程領域資深教授的先驗經驗,兼顧客觀測試數據來源的局限性和穩(wěn)定性,構建了車輛駕駛性評價體系。它包括評價參數獲取、評價指標體系、指標權重計算模型和動力總成客觀駕駛性評價模型。其中的駕駛性評價指標體系由目標層、子目標層、特征層和指標層構成,如圖1所示。
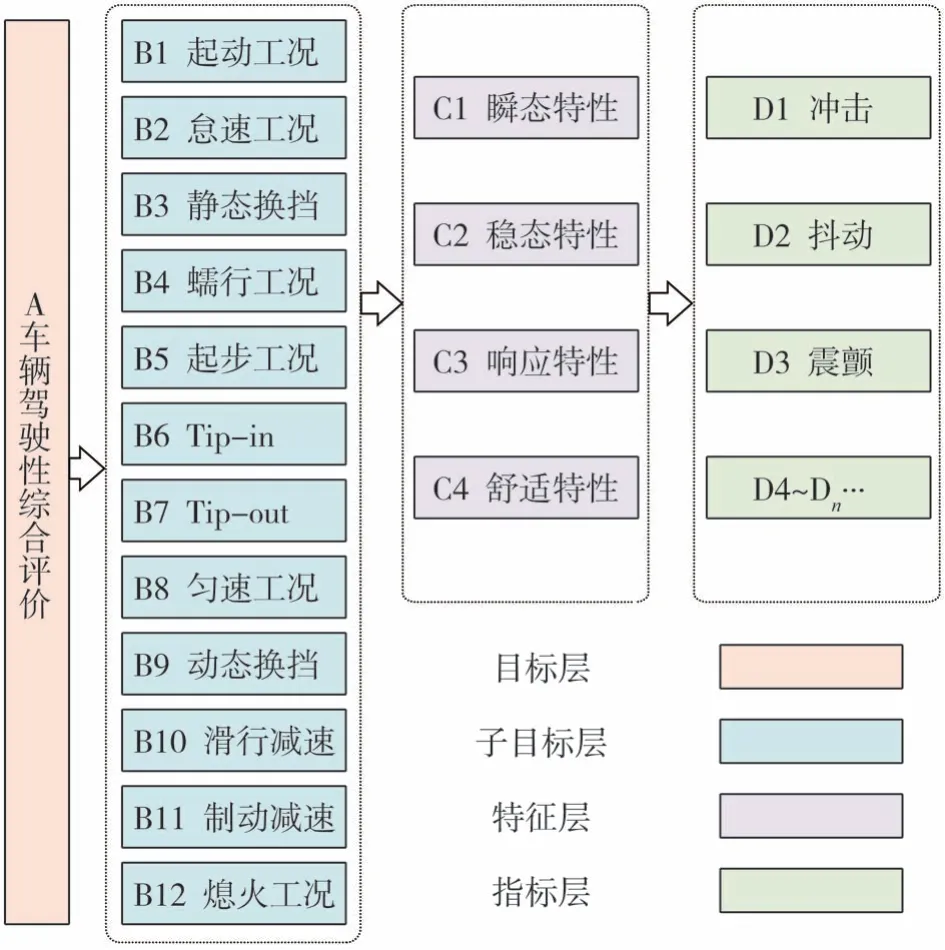
圖1 車輛駕駛性評價指標體系
目標層包括12 種工況的駕駛性。特征層結合各工況控制品質和響應性能分為瞬態(tài)特性、穩(wěn)態(tài)特性、響應特性和舒適特性,可反映駕駛員在車輛縱向行駛過程中與車輛持續(xù)交互作用而產生的主觀感受。指標層為特征層中某一維度或多維圍觀指標和性能參數,包括沖擊、抖動、震顫和振動劑量值等,適用于目標層駕駛性評價的所有工況。
2 工況優(yōu)選的改進AHP-CV-TOPSIS模型
2.1 模型分析流程
車輛駕駛性工況優(yōu)選的改進AHP-CV-TOPSIS模型分析流程如圖2 所示。首先根據專家組先驗知識和車輛實車采集的客觀數據,采用AHP 和CV 分別獲得主客觀權重,然后通過最小信息熵確定優(yōu)化的綜合權重,根據綜合權重求得加權規(guī)范矩陣。最后采用改進的TOPSIS 分析獲得綜合評價結果,并為分析對象排序。
2.2 基于AHP?CV的組合賦權方法
2.2.1 確定主觀權重
參照車輛駕駛性評價體系,借鑒專家組評判意見,基于1-9 分重要度標準采用層次分析法建立判斷矩陣。為確保評分等級的有效性和一致性,按照式(2)和式(3)獲得專家組的最終重要性分析結果。
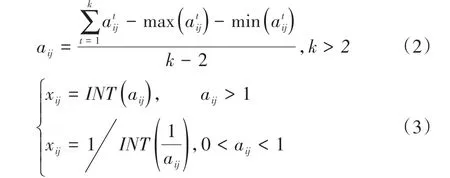
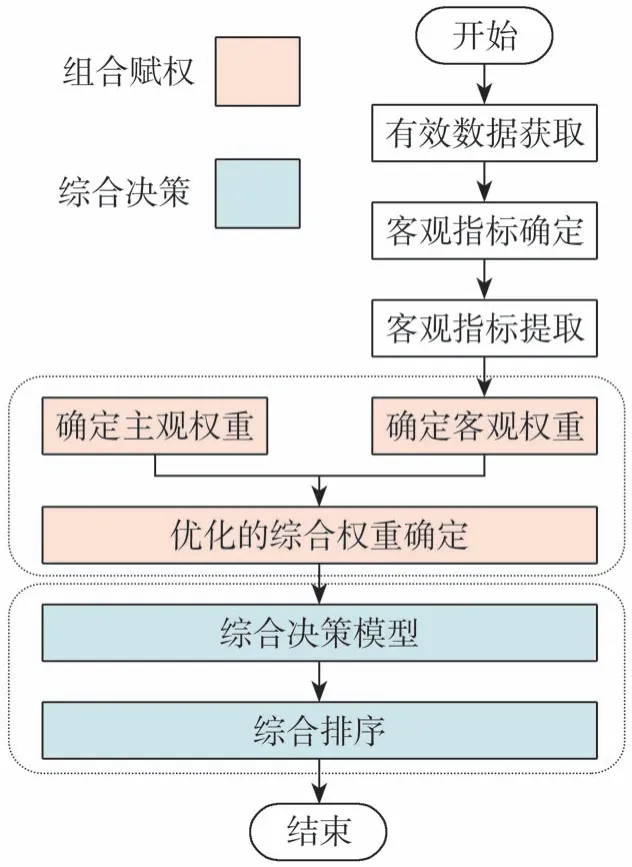
圖2 改進AHP-CV-TOPSIS模型分析流程
式中:aij為去除最大最小值后的重要程度平均值;為第t位專家判斷的第i項指標對于第j項指標的重要程度評分;k為主觀評價專家的總人數;xij為第i項指標相對于第j項指標的最終重要程度評分。
基于專家組最終重要程度評分,構建指標間的判斷矩陣X,如式(4)所示。通過將判斷矩陣轉換為對角矩陣求解最大特征值λmax和特征向量,根據式(5)檢驗評分的一致性后,可通過式(6)算得各指標的主觀權重s=s(i)。
式中:n為評價指標個數;CI和CR分別為一致性指標和一致性比率,當n=1,2,…,11時,RI分別取0,0,0.58,0.9,1.12,1.24,1.32,1.41,1.45,1.49,1.51。當CR<0.1時,滿足一致性檢驗,若CR超出上限0.1,須重新制定重要度判斷矩陣,直到滿足CR<0.1。
2.2.2 確定客觀權重
客觀權重用以從量化數據的角度反映指標間的聯系,針對量化指標的單位量級和平均數不同的特點,采用變異系數法可直接獲取不同指標間的客觀信息權重。變異系數法通過標準差與均值的比率獲得,考慮到負值指標,通過取絕對值的方法對傳統(tǒng)變異系數法進行優(yōu)化,優(yōu)化后第i個指標的變異系數為
式(8)是由變異系數確定客觀權重o=o(i)。

2.2.3 優(yōu)化權重模型
為科學分配主觀感受和客觀數據的權重占比,運用最小相對信息熵消除主客觀權重偏差。根據最小相對信息熵可求得優(yōu)化權重:
2.3 基于改進TOPSIS法的綜合決策
采用加權馬氏距離替代的歐氏距離既可以解決指標間的相關性問題,又能分辨指標間的重要性差異。本文選取加權馬氏距離對TOPSIS 法進行改進,其綜合決策步驟包括以下6步。
(1)建立初始評判矩陣:
式中:p和q分別為方案集和指標集的個數;k=1,2,…,p;l=1,2,…,q;Dkl為第k個方案中的第l個指標。
(2)建立標準化決策矩陣:
(3)對標準化決策矩陣加權,即將標準化矩陣S與2.2.3 節(jié)獲得的優(yōu)化權重w相乘,得到加權標準化決策矩陣R:
(4)適用于TOPSIS 的指標屬性分為效益型指標B和成本型指標C,理想解R+和負理想解R-。

(5)計算各方案在行維空間內第i個方案與正、負理想解的加權廣義馬氏距離:
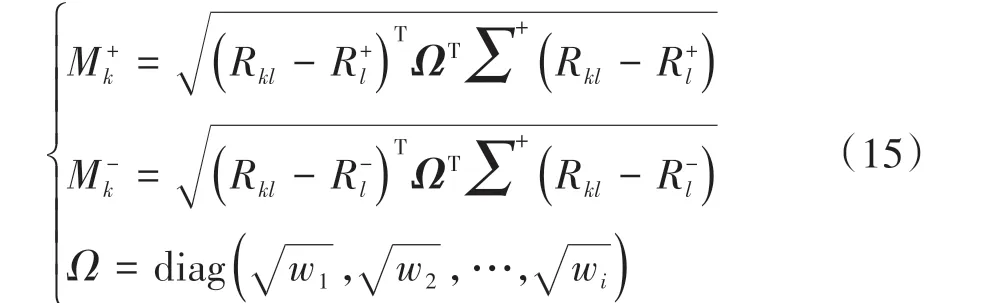
式中:M+k和M-k分別為備選方案到正、負理想解的加權廣義馬氏距離;Ω為加權矩陣;為指標間的協(xié)方差矩陣。
(6)計算方案與理想解相對貼近度Mk并排序,貼近度越大,方案越重要。

3 實車驗證與結果分析
采用智能駕駛性客觀評價工具I-DOET 對我國市場上15 種裝載DCT 車型的靜態(tài)換擋工況進行數據采集和處理分析。實車試驗平臺如圖3 所示,它包括I-DOET、加速度傳感器和計算機。為準確測試車輛動態(tài)響應,加速度傳感器通過F 夾安裝于駕駛員座椅導軌上,貼近車輛質心位置。I-DOET硬件系統(tǒng)有1 個CAN 總線接口和4 個AD/AC 端口,CAN 總線接口用于連接和讀取汽車總線上的信號,如變速器擋位、發(fā)動機轉速與轉矩、油門踏板行程、車速和制動信號等;模擬量接口用于連接和接收加速度傳感器信號。通過采用不同信號源并行采集控制的方法,保證多源信號同步獲取。信號采樣率、信號類型和數據采集與保存可以通過設計編寫的數字采集軟件來實現。相關的測試流程如下:關閉車窗和空調,發(fā)動機起動且保持怠速運轉,車輛停止,松手制動,踩制動,正常手動切換擋位(在2 s內完成)。靜態(tài)換擋工況中的擋位轉換包括P-D,D-N,N-R,R-N,N-D,D-R,R-D,D-P,P-R,R-P。最后通過I-DOET 硬件設備獲得變速器擋位、發(fā)動機轉速、車輛縱向加速度和制動信號。在試驗中,信號的采樣頻率設置為100 Hz。3 名評價人員對15 臺車輛的靜態(tài)換擋工況進行了數據采集和評分,獲得了45 組有效數據。采用客觀指標識別算法獲得用于駕駛性評價的指標數據集。表1 列出用于驗證模型準確性的一組指標數據,用于優(yōu)選靜態(tài)換擋工況的細分工況。

圖3 實車試驗平臺
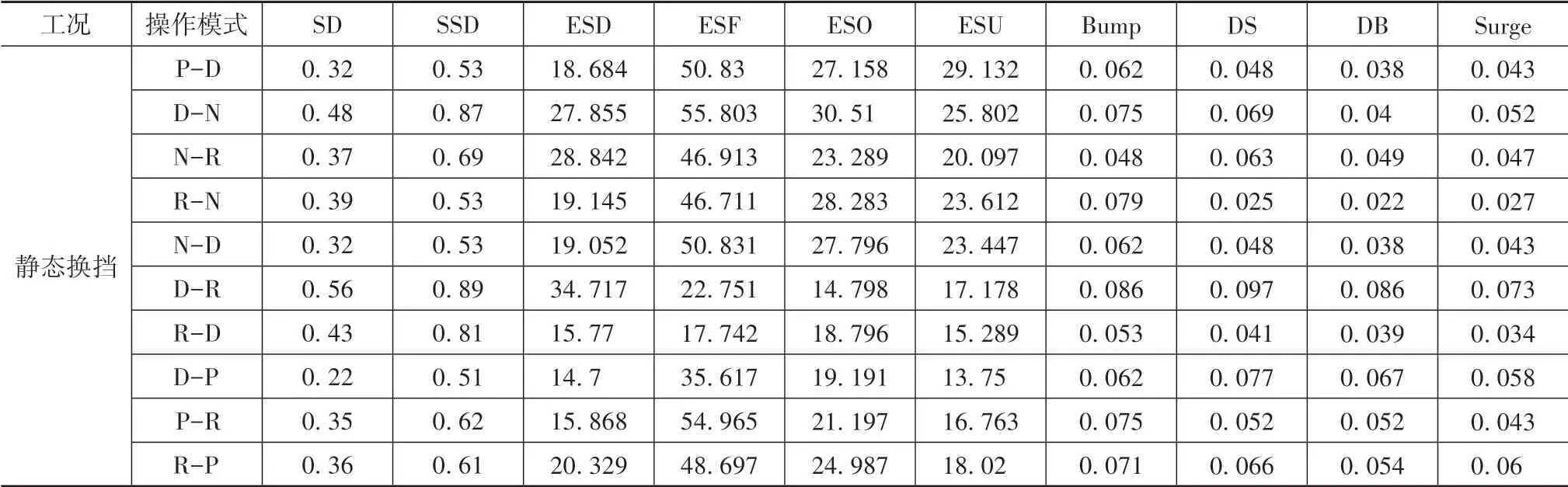
表1 靜態(tài)換擋細分工況評價指標值
結合專家組意見和第2.2.1節(jié)的理論分析,表2中列出從子目標層到指標層的判斷矩陣。
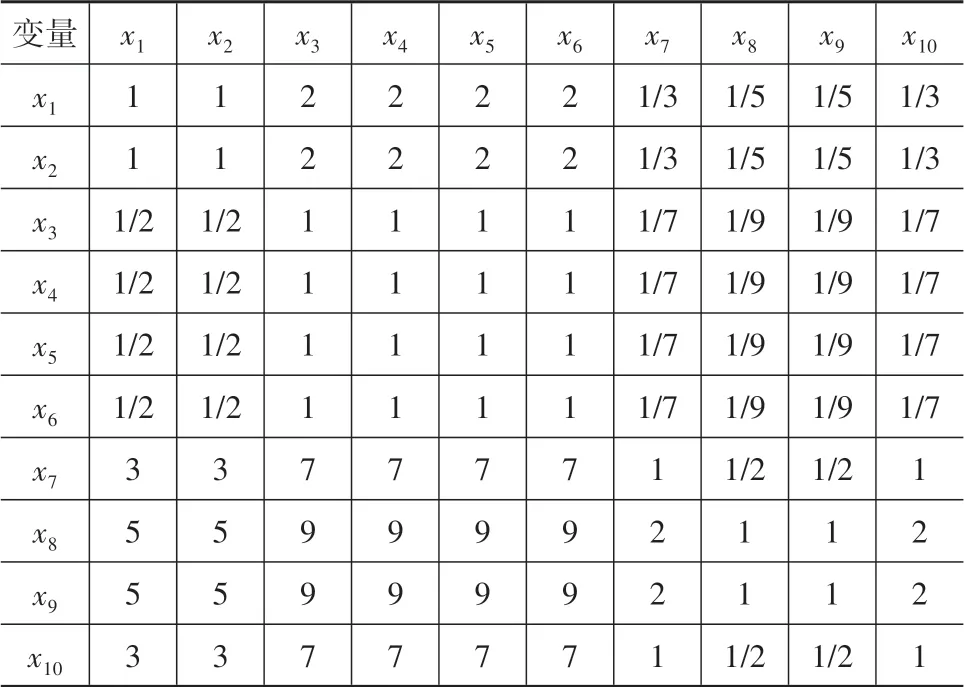
表2 子目標層判斷矩陣
基于各評價指標的權重,可根據式(2)~式(5)獲得最大特征根λmax為10.039,CI=0.0044,RI=1.49,CR=0.003<0.1,滿足判斷矩陣一致性的檢驗要求,即 各 指 標 的 權 重 為s=[0.0495,0.0495,0.025,0.025,0.025,0.025,0.15,0.248,0.25,0.15],運用式(7)和式(8)獲得各指標的客觀權重o=[0.0908,
0.0827,0.1141,0.1136,0.0784,0.0905,0.0652,0.1273,0.1355,0.1021],通過式(9)獲得優(yōu)化權重w=[0.0734,0.07,0.0584,0.0583,0.0484,0.052,0.1082,0.1944,0.2014,0.1354]。
使用式(14)計算正理想解和負理想解。正理想解為R+={0.033,0.029,0.028,0.023,0.019,0.023,0.043,0.097,0.107,0.023},負理想解為R-={0.013,0.017,0.012,0.007,0.009,0.011,0.024,0.025,0.027,0.063}。最后,使用式(15)計算理想解和負理想解之間的加權馬氏距離,最后按式(16)算出貼近度Mk,并按其大小排序,如表3 所示。由表可見,D-R 工況的Mk值為0.718 2,是各工況中最大者,表明該工況最為重要。這一結果符合實際,顯然是合理的,因為D-R換擋工況在移庫和倒車時使用頻繁,且變速器結構特征決定了D-R 切換容易引發(fā)沖擊。

表3 細分工況綜合排序
4 結論
搭建了一種動力總成客觀駕駛性評價體系,并開發(fā)了相應的軟硬件,該系統(tǒng)可自動完成數據采集、工況識別和特征提取等功能。提出了一種基于改進AHP-CV-TOPSIS的駕駛性綜合決策模型,揭示了細分工況對駕駛性評價的重要程度。
(1)采用層次分析法(AHP)和變異系數法(CV)確定主客觀權重,運用最小相對信息熵原理,獲得AHP-CV 模型的最優(yōu)權重,從而使工況優(yōu)選模型更加穩(wěn)定、準確,并提高了泛化能力,為動力總成駕駛性客觀評價工況優(yōu)選和提升主客觀評價一致性的精度提供了一種新思路。
(2)采用加權馬氏距離的改進逼近理想排序法計算的結果表明,D-R 工況是最重要的靜態(tài)換擋細分工況。這一結果符合實際,說明構建的模型可有效優(yōu)選靜態(tài)換擋的細分工況,且具有較好的拓展性,適用于動力總成客觀駕駛性評價的所有工況。
(3)今后工作應進一步利用專家知識庫和優(yōu)化的模糊規(guī)則,以使算法更易于解釋,并應嘗試更合適的可駕駛性評估工況優(yōu)選方法。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
石油瀝青(2021年4期)2021-10-14 08:50:44
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(2016年15期)2016-12-01 05:31:22
光學精密工程(2016年6期)2016-11-07 09:07:19
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
俄羅斯問題研究(2012年1期)2012-03-25 09:54:51
