五相永磁同步電機開路故障診斷
2021-04-12 09:22:48李添幸馬瑞卿趙犇楊偉舟彭家勇
西安交通大學學報 2021年4期
李添幸,馬瑞卿,趙犇,楊偉舟,彭家勇
(西北工業大學自動化學院,710129,西安)
從全電飛機(或多電飛機)的概念被提出,到目前已經融入到飛機設計的核心理念中,以電機和驅動控制器為核心的電驅動系統在飛機上得到了廣泛的應用,比如電剎車、擾流板以及以燃油泵為代表的各類泵負載。大型飛機電驅動系統功率等級需求的增加,以及機載設備功率等級的大幅度提升,對機載電機提出了高功率密度、高可靠性、高安全性等要求[1-5]。多相電機由多相繞組構成,具有可靠性高、功率密度高、容錯能力強等優點[6-8],正好迎合這一發展的需求。
目前,針對多相永磁同步電機驅動及控制技術的研究,基本上都是基于三相電機的控制策略,并結合多相電機特點展開的[9]。還有一些學者針對不同故障模型,提出了相應的容錯控制策略,以提高電機在故障狀態下的性能[10-14]。根據對電驅動系統故障樹的分析可知,最嚴重的故障為電機定子繞組匝間短路故障和開路故障。開路故障通常有定子繞組開路故障、逆變器任何一相2個功率器件的開路故障以及電機連接器的機械故障引起的開路故障[15]。開路故障會導致各相電流不平衡,產生較大的轉矩脈動,增大電磁干擾,長期工作可能還會帶來其他隱患,并有可能使故障擴大化。因此,當發生開路故障時,為了保證所有機載設備的安全性,以及電驅動系統的輸出特性滿足機載系統的控制需求,電驅動系統需要快速和準確地進行開路故障判斷與定位,為容錯控制提供相應的執行依據。
根據故障診斷方式,開路故障診斷方法可分為基于電機模型和基于采樣數據兩種[16]。現有的開路故障診斷方法主要是圍繞三相電機及其驅動器系統進行分析和討論的[17-25]。Jung等提出了一種基于模型參考自適應的故障診斷方法,通過比較模型輸出電流與實際電機電流值之間的誤差進行故障診斷[17]。由于在診斷過程中使用到了電機模型,所以電機參數的波動會影響診斷效果,造成誤判。
基于采樣數據的故障診斷方法通過分析采樣數據,提取信號特征,結合在正常狀態下先驗知識進行故障診斷。相比之下,受到電機參數擾動的影響小。Hang等根據開路故障下零序電壓幅值和電流相位的變化進行故障診斷[18],為了獲得零序電壓,采用3個電阻星型連接重構中心點。Cai等采用快速傅里葉變換對兩路線電壓進行頻譜分析,根據故障狀態下頻譜的變化實現故障診斷[19]。Hang等基于電壓信號進行故障診斷,需要增加額外的電壓傳感器和相應調理電路,增加電路復雜度,使可靠性降低[18-19]。Khojet等對單周期內每一相定子電流平均值進行分析,實現了多絕緣柵雙極型晶體管(IGBT)和電流傳感器故障診斷[20-22]。Potamianos等對相電流進行哈爾小波變換,采用模糊推理系統對變換結果進行分析以實現開路故障的檢測[23]。Huang等以每相電流給定值與實際采樣值之間的誤差作為回聲狀態網絡輸入,通過不斷訓練回聲狀態網絡模型,以實現故障診斷[24]。Khojet等采用的故障診斷方法都是在自然坐標系下實現的,通過分析每相電流在故障下的特征進行故障辨識[20-24]。在多相電機的故障診斷中,隨著定子繞組相數的增加,診斷策略的計算量也隨之大幅度增加,因此影響其診斷效率。
基于靜止坐標系(或旋轉坐標系)中的電流軌跡特征進行故障診斷,可以大大簡化診斷過程,提高診斷效率。Diallo等將這一理念用于感應電機開路故障診斷中,通過分析感應電流在α-β子空間中電流軌跡特征,實現逆變器中功率器件開路故障診斷[25]。Trabelsi等將歸一化后的三次諧波電流組成二維向量,根據二維向量在x-y子空間中的分布特點進行開路故障診斷[26]。該方法要求三次諧波與基波電流之比必須大于20%,才能有效地進行故障診斷。為了解決這一問題,Trabelsi等采用基波電流參考值與采樣值之間誤差構成二維故障向量,根據歸一化后的二維故障向量在αf-βf子空間位置幅值與方向進行故障診斷[27]。在構成向量以及歸一化的過程中涉及到復雜的運算,極大地增加了處理器負擔。此外,其故障判定是根據所構成矢量幅值在電機旋轉360°電角度時間內積分值進行的。Trabelsi等進一步將這種理念用于五相永磁同步電機,實現了單相橋臂功率器件開路故障和單相斷路故障的故障診斷[27-28]。在實際工程應用中,隨著電機轉速的升高,在一個360°電角度內的采樣點個數會不斷減少,并且故障定位是根據所構建的向量歸一化后的方向決定,當用于兩相開路故障的故障診斷時,會產生錯誤的故障定位。
本文提出一種基于電流采樣數據的故障診斷方法。根據電流軌跡分布特征,實現五相永磁同步電機(FP-PMSM)驅動系統中單相、雙相開路故障診斷。通過坐標變換減少診斷過程中歷史數據的存儲,提高診斷效率。首先,通過分析FP-PMSM電驅動系統的控制框圖和數學模型,得到靜止坐標系下電流與電壓的傳遞函數。其次,根據正常狀態下的端電壓輸出方程和傳遞函數,得到正常狀態基波電流在α-β子空間的軌跡特征。再次,根據故障狀態下的端電壓輸出方程和傳遞函數,得到不同故障狀態下基波電流和三次諧波電流的軌跡特征。最后,通過分析基波電流和三次諧波電流的軌跡特征,提出相應的故障診斷策略,并通過實驗進行驗證。
1 數學模型
FP-PMSM定子與轉子間的氣隙分布,以及定子繞組的繞線分布,導致在切割磁場的過程中,定子電流產生基波磁動勢的同時產生三次諧波磁動勢。因此,用于FP-PMSM的Clark坐標變換的靜止坐標系可以分為α-β與x-y兩個子空間,分別對應基波數學模型和三次諧波數學模型。
(1)
(2)
式中:ωe為電機的電角速度;ψf1為基波磁鏈幅值;ψf3為三次諧波磁鏈幅值;Lm為電感幅值;R為等效定子相電阻。
五相永磁同步電機參數如表1所示,繞組形式采用單層分數槽集中繞組。
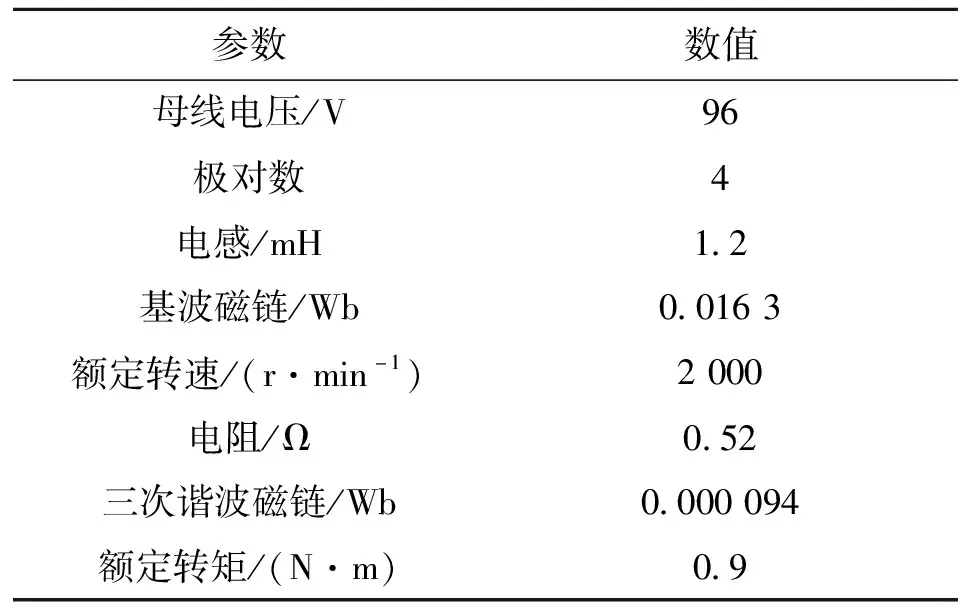
表1 FP-PMSM參數
FP-PMSM驅動逆變器由5個橋臂組成。逆變器可以產生32個基礎電壓矢量,電壓矢量在α-β子空間幅值大小根據逆變器的導通形式可以分為4類:①單個上橋臂或下橋臂導通,為中矢量,其幅值為0.4udc;②兩個相鄰的上橋臂或下橋臂導通,為大矢量,其幅值為0.647 2udc;③兩個非相鄰的上橋臂或下橋臂導通,為小矢量,其幅值為0.247 2udc;④上橋臂(或下橋臂)全部導通,為零矢量,其中udc為母線電壓。α-β子空間中任何一個空間電壓矢量在x-y子空間中有且只有唯一的伴生電壓矢量,該伴生電壓矢量的相角為α-β子空間中電壓矢量的3倍。中矢量在x-y子空間中伴生電壓矢量幅值不變;大矢量與小矢量在x-y子空間中伴生電壓矢量幅值分別為0.247 2udc、0.647 2udc。
目前常用于FP-PMSM的空間矢量脈寬調制(SVPWM)主要分為2種:①參考空間電壓矢量由矢量所在扇區相鄰的2個大矢量合成;②參考空間電壓矢量由矢量所在扇區相鄰的2個大矢量和2個中矢量合成[28]。由于三次磁動勢的存在,必須要考慮合成后的電壓矢量在x-y子空間的映射。根據32個基礎電壓矢量在不同子空間中的幅值與相位可知,在α-β坐標系下相位相同的中矢量與大矢量,其在x-y坐標系下的伴隨電壓矢量相位相差180°,幅值比為1∶1.618。采用第二種方式合成參考電壓矢量,可以保證逆變器輸出端電壓中三次諧波含量為零,其中相位相同的中矢量與大矢量作用時間比等于1∶1.618。FP-PMSM矢量控制框圖如圖1所示。
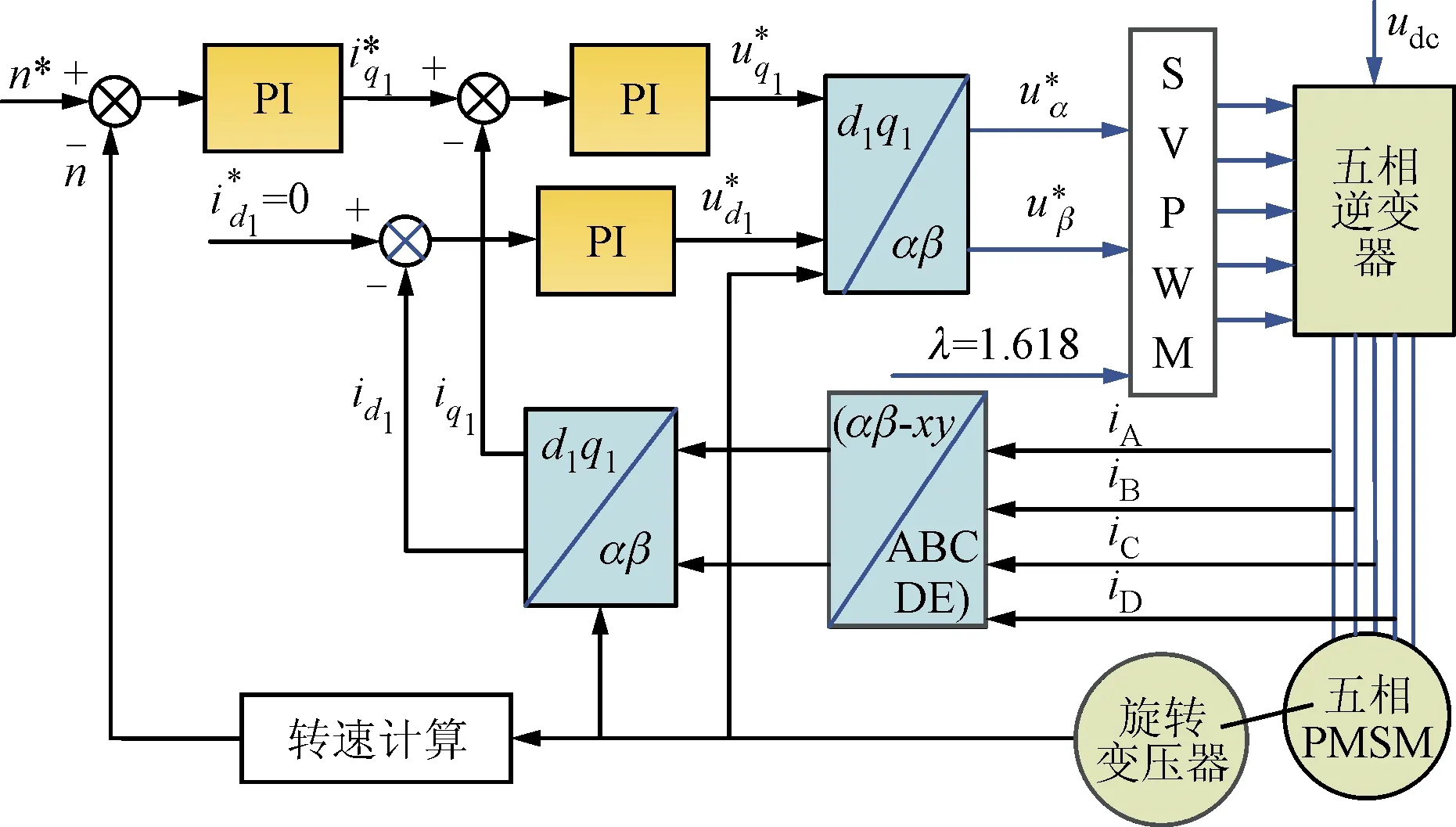
圖1 FP-PMSM矢量控制原理圖
2 正常狀態電流軌跡特性
(3)
式中:un為電機中性點對地電壓,
un=(uA+uB+uC+uD+uE)/5
由圖1和式(1)可以得到,閉環狀態下基波電壓與基波參考電流之間傳遞函數在頻域下的表達式為
(4)
式中:kp和ki均為電流環PI參數,kp=γLm,ki=γR;γ為電流環帶寬。ufv(s)=uv(s)-ev(s),v∈{α,β}。
對式(3)進行Clark坐標變換,將變換后的基波分量和式(2)中基波反向電動勢代入式(4),得到正常狀態下系統閉環控制基波電流表達式
(5)

根據式(5)可知,基波電流在α-β空間的軌跡為圓形,其圓心為坐標軸原點,半徑等于kc1。
3 故障狀態電流軌跡特性
目前針對FP-PMSM開路故障主要可以實現的是單相開路和雙相開路故障轉態下的容錯控制,其中雙相開路故障分為:①相鄰兩相開路;②相隔兩相開路。以上所述的三類開路故障具體到故障發生位置,可分為15種故障狀態,如表2所示。在開路故障發生前后,SVPWM以及電機的本體結構沒有發生改變,改變的只有故障相端口對地輸入電壓,而其他正常相的端口對地輸入電壓與故障發生前是一致的。故障相繞組與逆變器的連接回路中發生斷路,變成懸空的狀態,導致端口對地電壓不再受SVPWM控制,而且無法對其測量。為此,根據FP-PMSM的數學模型對故障相的相電壓進行估計。通常電機相電壓由4部分組成:①相電阻上的壓降;②故障相自感電動勢;③故障相與其他相的互感電動勢;④反向電動勢。由于故障相相電流為零,因此前兩部分壓降為零。此外,為了提高FP-PMSM的容錯能力,FP-PMSM定子繞組采用單層分數槽集中繞組方式設計,以消除各相繞組之間的互感。因此,故障相的相電壓等于電機的反向電動勢,如式(6)所示,從A相到E相,相位ι依次取0、1、2、3、4。
uxn=exn=-ωe[ψf1sin(θ-72°ι)+
3ψf3sin3(θ-72°ι)]
(6)
以A相開路為例,根據式(3)和式(6),可得到A相開路故障狀態下端口對中性點電壓為
(7)
對式(7)進行Clark坐標變換,得到故障狀態下的五相相電壓在靜止坐標系上的映射
(8)
3.1 基波電流α-β子空間軌跡分析
將式(8)中的uα、uβ以及式(2)中的eα、eβ代入式(5),得到A相開路故障下,FP-PMSM基波電流在α-β子空間的表達式為
(9)

忽略式(9)中的三次諧波分量和初始狀態響應,可以得到A相發生開路故障時,基波電流在α-β的軌跡為橢圓形,軌跡方程如下
(10)
同理,可以得到其他故障模式下iα、iβ表達式,如表2所示。由表2可知,在故障狀態下基波電流在α-β空間的軌跡不再是圓形。
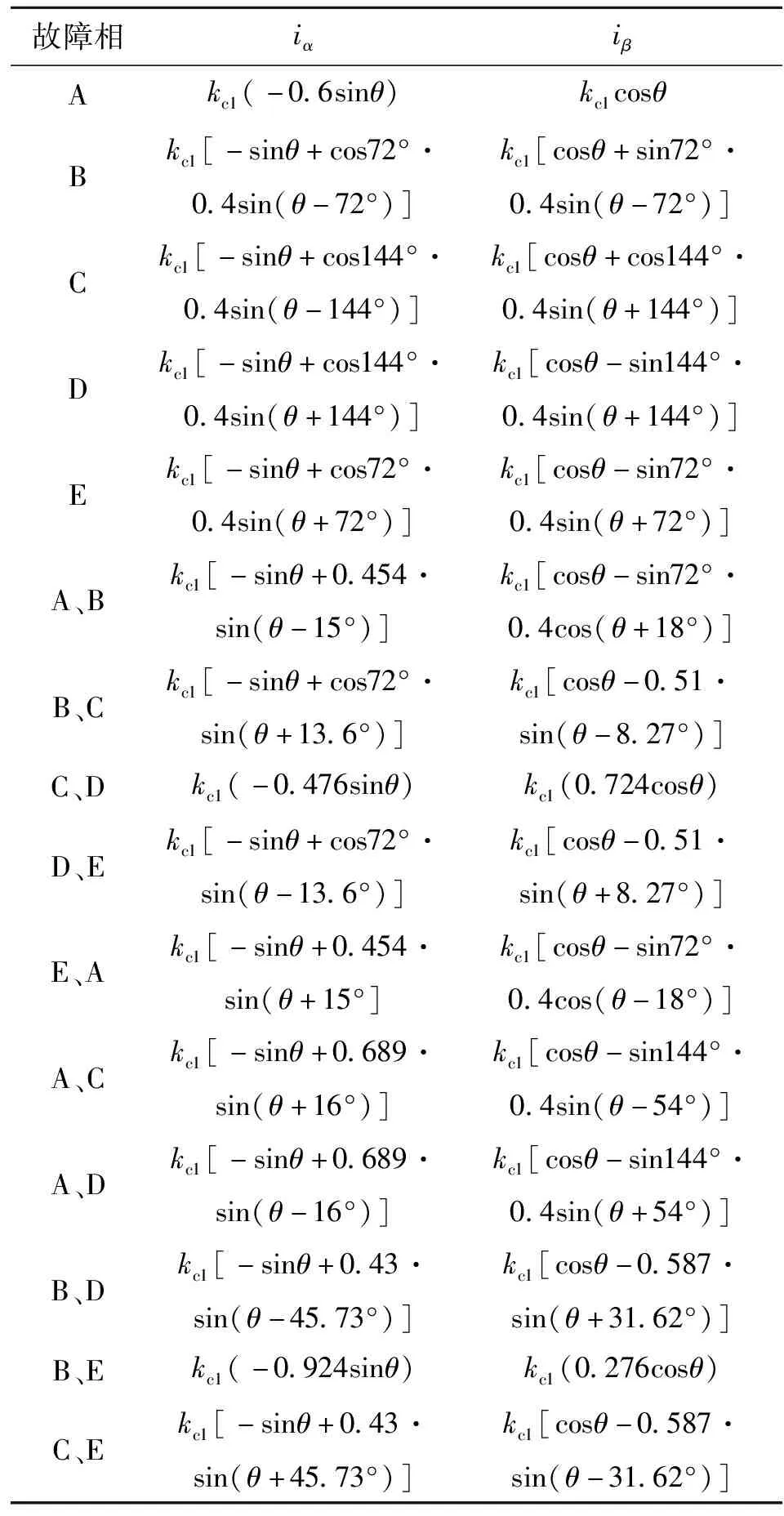
表2 15種故障狀態下α-β空間基波電流表達式
在實驗中,控制FP-PMSM轉速為1 000 r/min,負載轉矩為0.9 N·m,分別模擬了三類開路故障,即A相開路、A、B兩相開路以及A、C兩相開路。對五相電流采樣值進行Clark變換,得到正常狀態與3種故障狀態的基波電流在α-β子空間軌跡,如圖2所示。
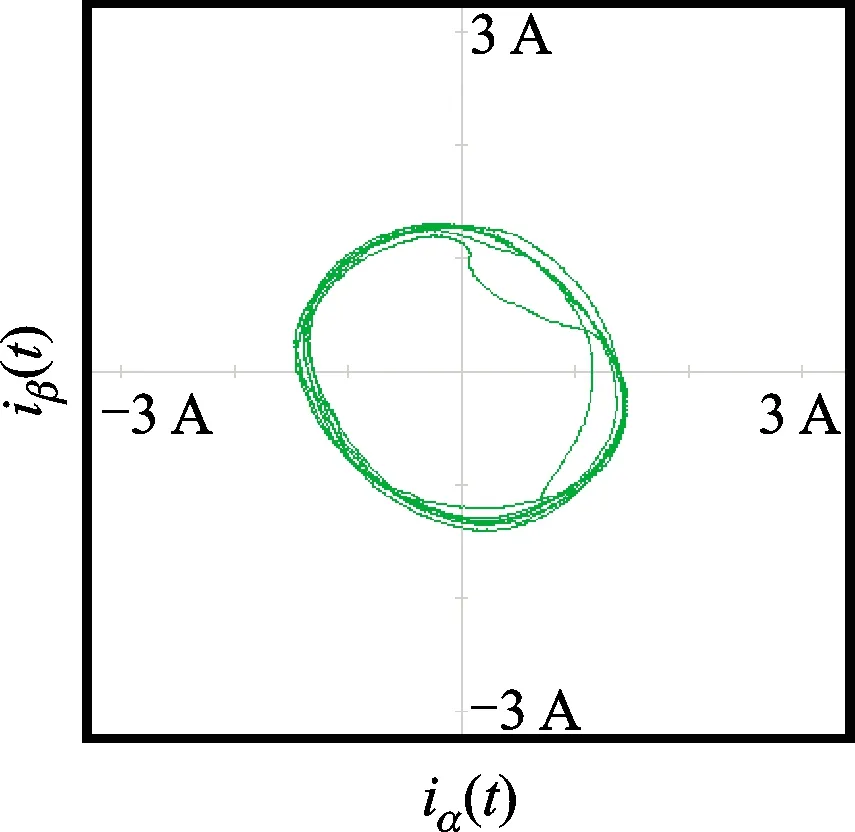
(1)正常
實驗波形與表2中相對應的故障狀態下iα、iβ表達式相互印證。通過分析基波電流在α-β子空間軌跡可以得到以下結論:①在正常狀態下,電流軌跡為圓形,考慮到三次以上諧波的影響,圓形電流軌跡會產生一些畸變,如圖2a所示;②在開路故障狀態下,電流軌跡均不再是圓形軌跡,電流軌跡畸變率遠遠大于正常狀態,如圖2b~d所示;③在任何狀態下,電流軌跡均為原點對稱。電流軌跡距原點距離隨電機旋轉周期性變化,是電流頻率的2倍。
3.2 三次諧波電流d1-q1子空間軌跡分析

(11)

對式(11)進行Park坐標變換,得到三次諧波電流在基波旋轉坐標上的表達式
(12)
為了保證系統的穩定性,通常電流環帶寬要遠大于轉速環帶寬。受電氣時間常數的限制,電流環帶寬γ通常設定為R/Lm,因此,在轉速環帶寬范圍內,延遲角η的正弦值約等于0,余弦值約等于1。除此之外,為了方便分析,忽略式(12)中的四次諧波有
(13)
根據式(11),延遲角χ的正切值是延遲角η正切值的3倍。由式(13)中的term1和term2可以得到兩個圓形軌跡,分別如圖3中紅線和紫線所示。通過矢量合成term1和term2的軌跡可以得到三次諧波電流軌跡,如圖3中藍線所示。兩種延遲角之間誤差的存在,導致三次諧波電流軌跡為順時針旋轉的橢圓。其旋轉角度由kc3、kc4、χ與η共同決定。根據三角形的幾何原理,當kc3=4kc4時,旋轉角度滿足下列等式
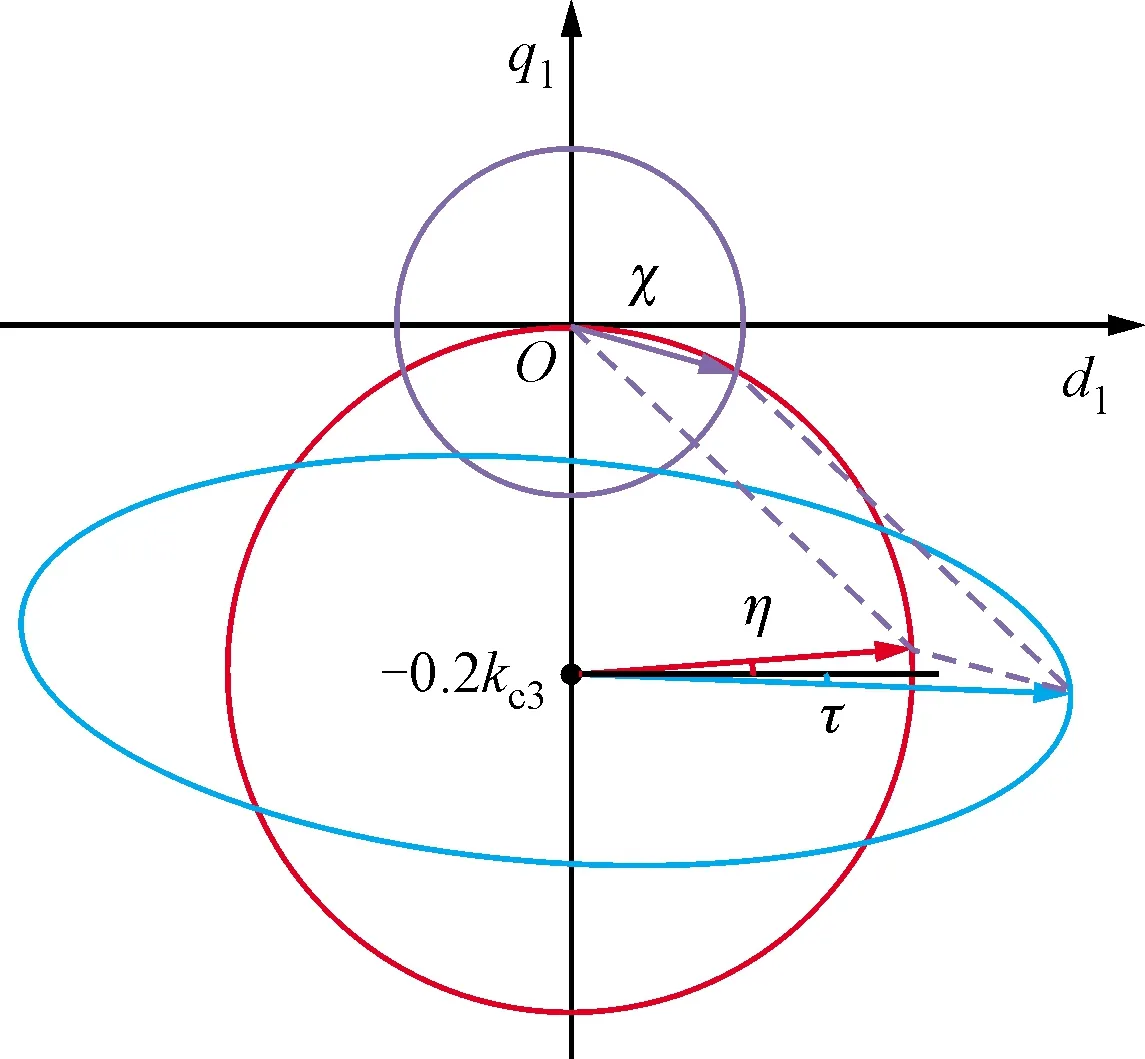
圖3 三次諧波電流在d1-q1空間電流軌跡(A相開路故障)
(14)
通過對式(14)求ωe的偏導,當ωe=0.557γ時,旋轉角最大,為15°。但是,實際情況下kc3>4kc4,所以旋轉角度小于15°。同理可得id1-xy、iq1-xy在其他開路故障狀態下的表達式,如表3所示。
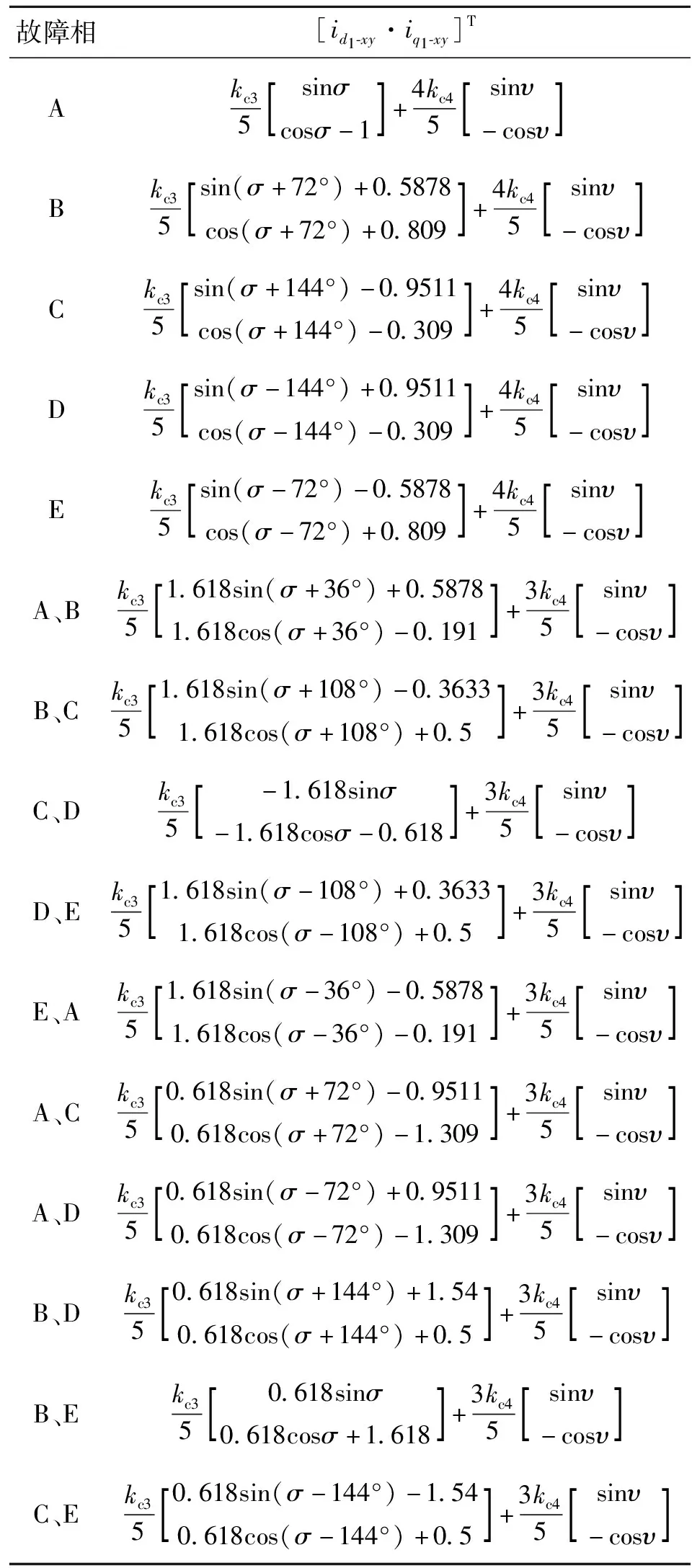
表3 15種故障狀態下三次諧波電流在d1-q1空間的表達式
設定電機的負載轉矩為0.9 N·m,分別工作于3種轉速,其實驗波形如圖4所示。根據實驗波形可知,雖然電流軌跡隨著電機轉速發生了旋轉,然而,軌跡的分布特征沒有改變。
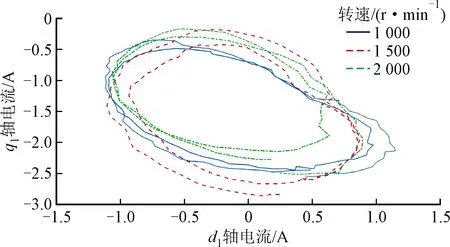
圖4 3種轉速下基波旋轉坐標系下三次諧波電流軌跡(A相開路故障)
設定電機的轉速為1 500 r/min,分別工作于3種負載轉矩,其波形如圖5所示。根據實驗波形可知,當轉速不變時,kc3隨著負載轉矩增加而增加,而kc4不會隨著負載轉矩變化而變化。因此,橢圓的長半軸與短半軸均隨著轉矩增大而增大。然而,軌跡的分布特征沒有改變。根據實驗波形圖4和圖5可知,三次諧波電流在d1-q1空間的軌跡分布特征不隨轉速和轉矩的變化而變化。
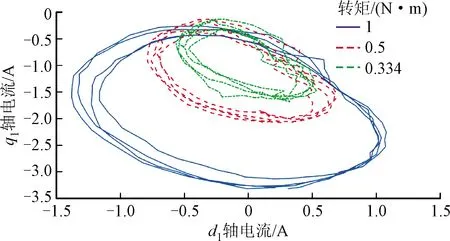
圖5 3種負載轉矩下基波旋轉坐標系下三次諧波電流軌跡(A相開路故障)
類比A相開路故障對應的電流軌跡特征可以得到15種開路故障下三次諧波電流在基波旋轉坐標系上的分布特征,如表4所示。
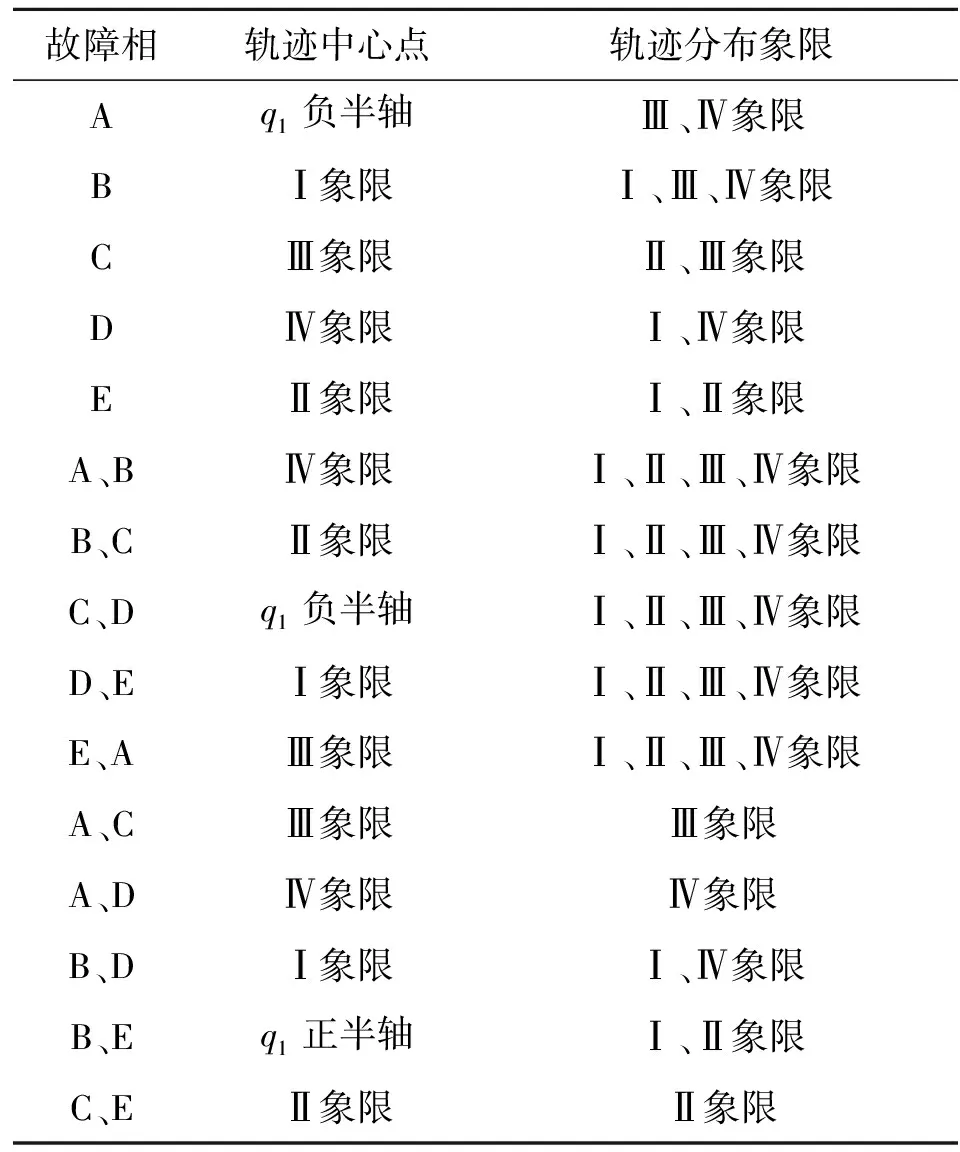
表4 不同故障下,三次諧波電流d1-q1空間軌跡特征
4 故障診斷
4.1 故障診斷步驟
在正常狀態下,基波電流在α-β子空間的軌跡到原點的距離相同。當發生開路故障時,基波電流在α-β子空間的軌跡到坐標軸原點的距離隨著轉子位置變動而變化,周期為基波頻率的2倍頻。根據表3可知,在故障狀態下的id1-xy與iq1-xy的頻率同樣也為基波頻率的2倍頻,因此將電機轉過5個扇區的時間設定為一個診斷周期,5個扇區內的電流采樣值作為故障診斷數據。根據表2可知,當發生任何一種開路故障時,基波電流在α-β子空間的軌跡不再為圓形,因此可以將軌跡到原點距離的變化作為是否發生開路故障的診斷依據。在此基礎上,根據三次諧波電流在d1-q1子空間的軌跡分布特征進行故障定位。
將實時采樣的五相電流經過Clark坐標變換,分別得到α-β子空間的iα與iβ,x-y空間下ix與iy。根據式(15)得到基波電流軌跡到原點距離
(15)
式中:i∈{1,2,…,n};t1~tn為一個診斷周期內的采樣點。
將電機轉過每個扇區時間內所有的采樣點所對應的基波電流軌跡到原點距離代入式(16),得到每個扇區對應的平均值。
(16)
式中:i∈{m1,m1+1,…,m2};tm1~tm2為一個扇區內的采樣點。
在一個診斷周期內電機轉過5個扇區,根據式(16),可以得到5個平均值、最大值Diαβ,max、最小值Diαβ,min,以及平均值Diαβ,avg。將Diαβ,max、Diαβ,min、Diαβ,avg代入式(17),得到基波電流軌跡畸變率dratio,當dratio>γ時,則認為發生開路故障。
dratio=(Diαβ,max-Diαβ,min)/Diαβ,avg
(17)
將ix與iy代入式(18),映射到d1-q1子空間。
(18)
以id1-αβ3為橫坐標,iq1-αβ3為縱坐標,根據表5,得到該時刻三次諧波電流在d1-q1子空間所在區域。通過對一個診斷周期內所有采樣時刻所對應的區域進行匯總,得到三次諧波電流在d1-q1子空間的軌跡分布。對一個診斷周期內所有id1-αβ3與iq1-αβ3進行累加求平均值,如式(19)所示
(19)
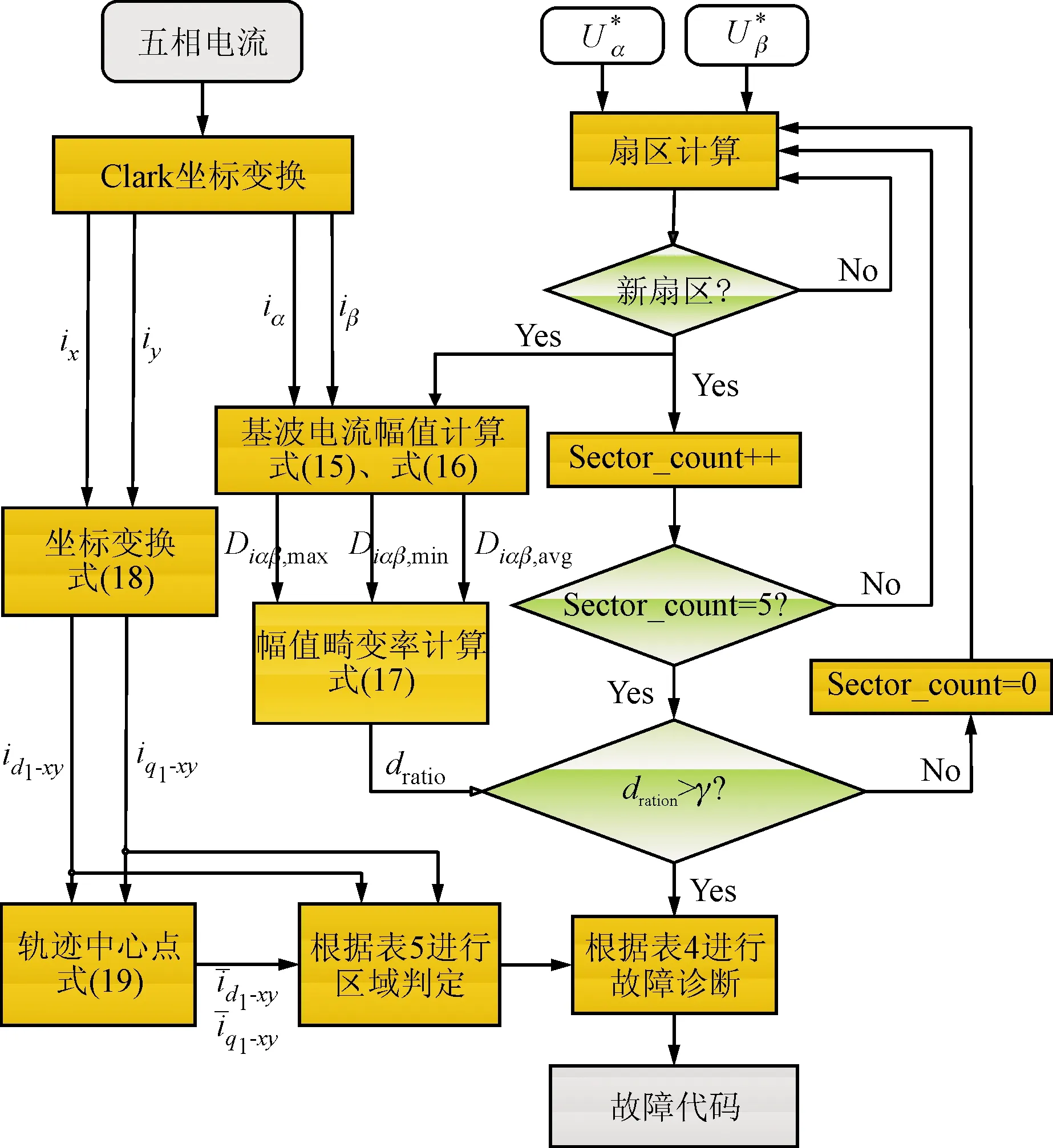
圖6 故障診斷流程圖
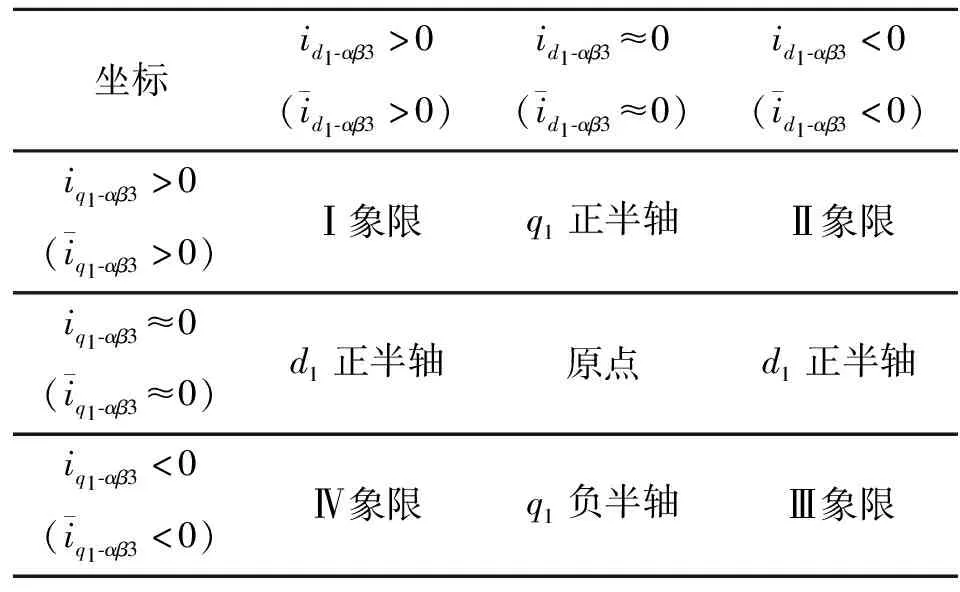
表5 三次諧波電流在d1-q1空間區域分布的判定依據
4.2 實驗平臺和故障診斷波形
實驗測試平臺如圖7所示。主控單元采用數字信號處理器DSP實現SVPWM算法和故障診斷算法,逆變器的開關頻率為10 kHz。在實驗中采用空氣開關模擬開路故障。波形中ms/div代表一橫格跨度的時間,其中電流波形一豎格跨度的電流為2 A。
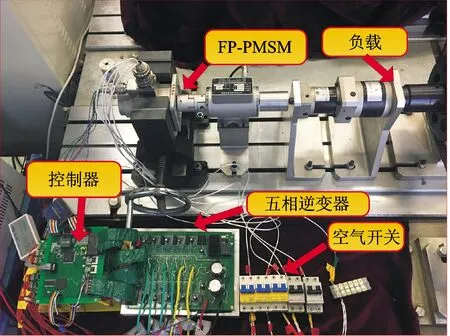
圖7 實驗平臺
為了使故障診斷過程更加直觀,采用DA轉化器實時輸出故障診斷結果。由于實驗平臺選用DA轉換器的最大輸出為3.3 V,因此以0.2 V的級差來區分15種故障。不同故障狀態對應故障診斷結果的故障信號具體設定如表6所示。
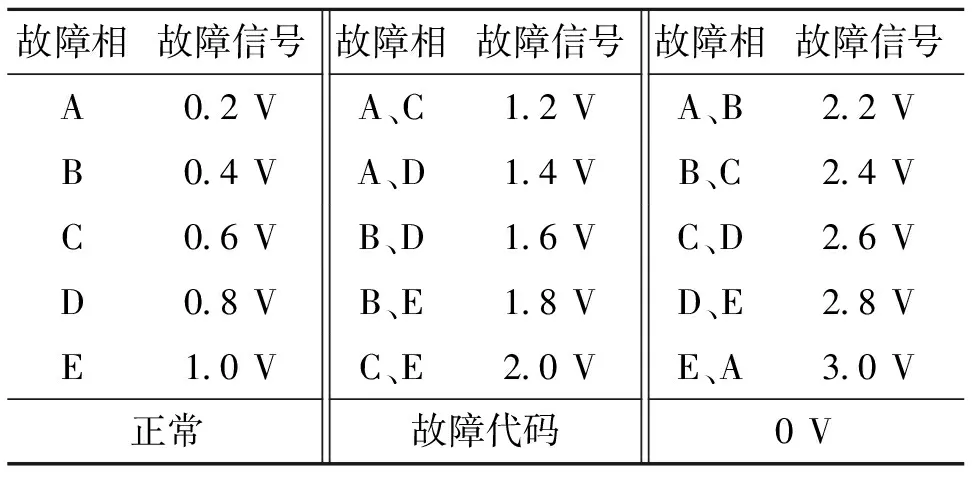
表6 故障信號輸出電壓
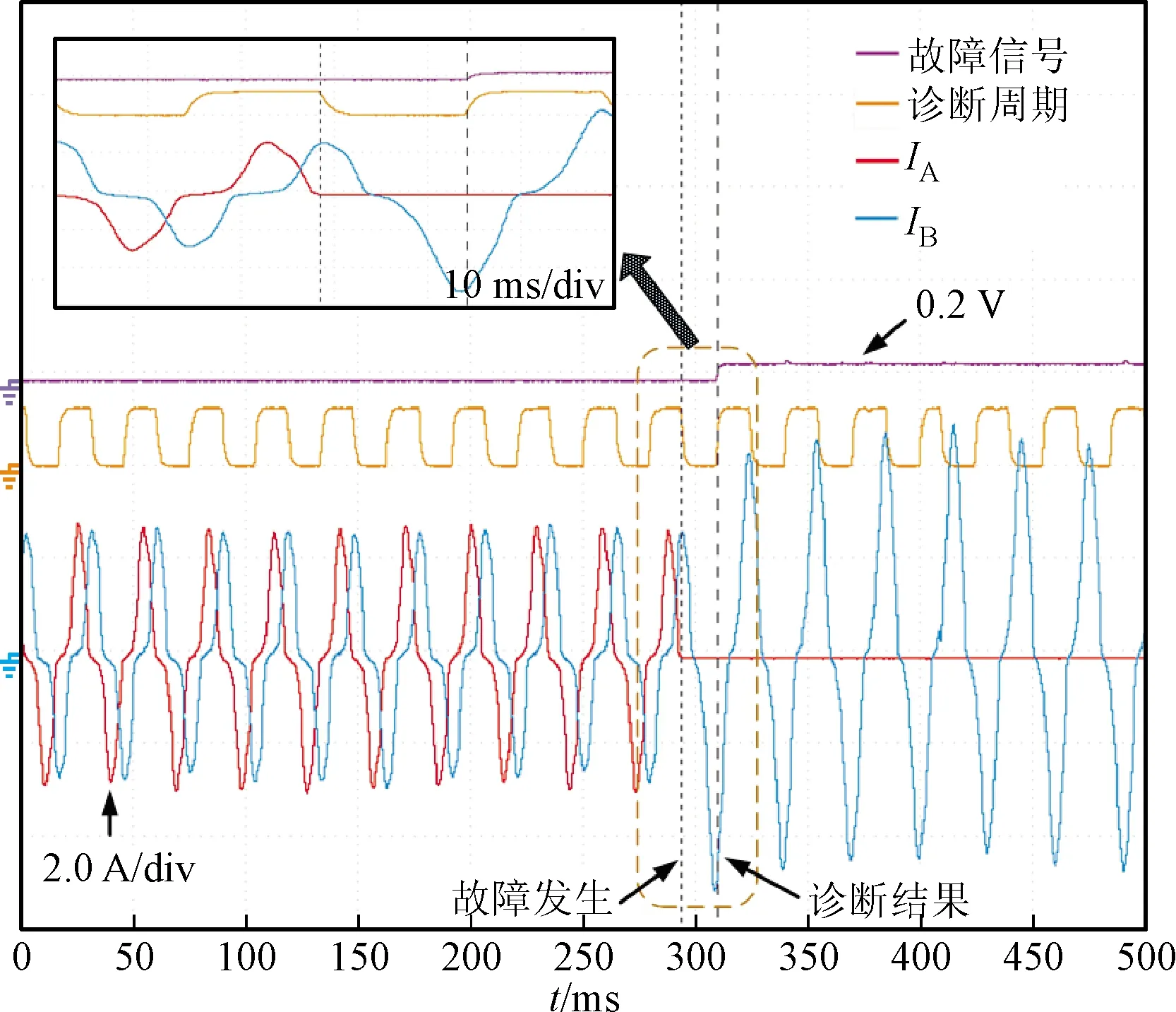
實驗電機負載轉矩為額定負載轉矩,電機轉速分別設定為500、1 500 r/min,分別進行單相開路、相隔和相鄰兩相開路實驗。實驗波形分別為A相開路故障(圖8),A、C相開路故障(圖9)以及A、B相開路故障(圖10)。圖8為正常運行過程中A相發生開路故障的實驗波形,開路故障發生后,A相電流值等于零,B相電流大于正常轉態,在一個診斷周期后,紫色線從0變成0.2 V,代表診斷出A相開路故障。在圖8b中,一個診斷周期中電機轉過5個扇區,每個扇區對應的基波電流軌跡到原點距離的平均值依次為2.029、2.484、3.068、2.986、2.72。將其中的最大值、最小值以及平均值代入式(17),得到電流畸變率為0.391,大于閾值γ,判定為發生開路故障。通過匯總每一采樣時刻三次諧波電流在d1-q1子空間中分布區域,得到三次諧波電流在d1-q1子空間分布于Ⅲ、Ⅳ象限。電流軌跡中心點為(0.004,-1.118),位于d1-q1子空間的負半軸。根據表4,故障定位為A相開路故障。
(a)500 r/min,0.9 N·m
(a)500 r/min,0.9 N·m
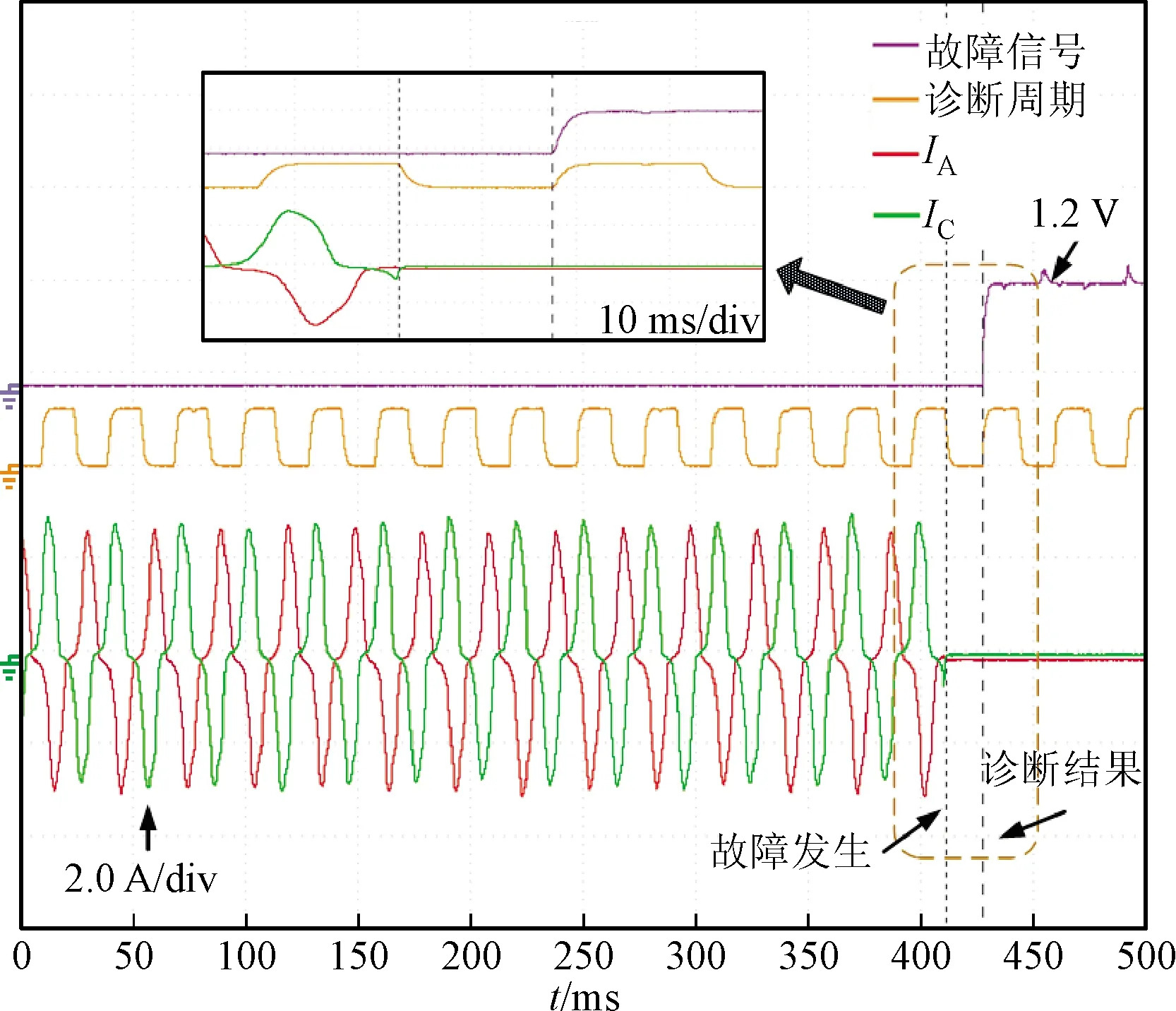
根據圖9可知,當A、C兩相同時發生開路故障,A、C兩相電流同時等于零,在一個診斷周期后,紫色線從0變成1.2 V,代表診斷出A、C兩相發生開路故障。圖10為正常運行過程中A、B兩相同時發生開路故障實驗波形,當發生開路故障后,A、B兩相電流同時為0,一個診斷周期后,紫色線從0變成2.2 V,代表診斷出A、B兩相發生開路故障。
(a)500 r/min,0.9 N·m
圖11為FP-PMSM在轉速、轉矩變動時發生開路故障的實驗波形,圖中棕紅色線代表電機轉速。圖11a為電機工作于轉速上升過程中,起始轉速為300 r/min,伴隨著轉速上升,負載轉矩從0.2 N·m升到0.9 N·m,實驗波形中兩相電流的幅值與頻率均有明顯增加趨勢;當轉速上升到750 r/min左右時,A相發生開路故障,并在一個故障診斷周期后,故障代碼從0變成0.2 V。圖11b為電機工作于轉速下降過程,起始轉速為1 500 r/min,隨著轉速下降,負載轉矩從0.9 N·m下降至0.2 N·m,實驗波形中兩相電流的幅值與頻率明顯減小;當轉速降到1 000 r/min左右時A相發生開路故障,并在一個故障診斷周期后,故障代碼從0變成0.2 V。
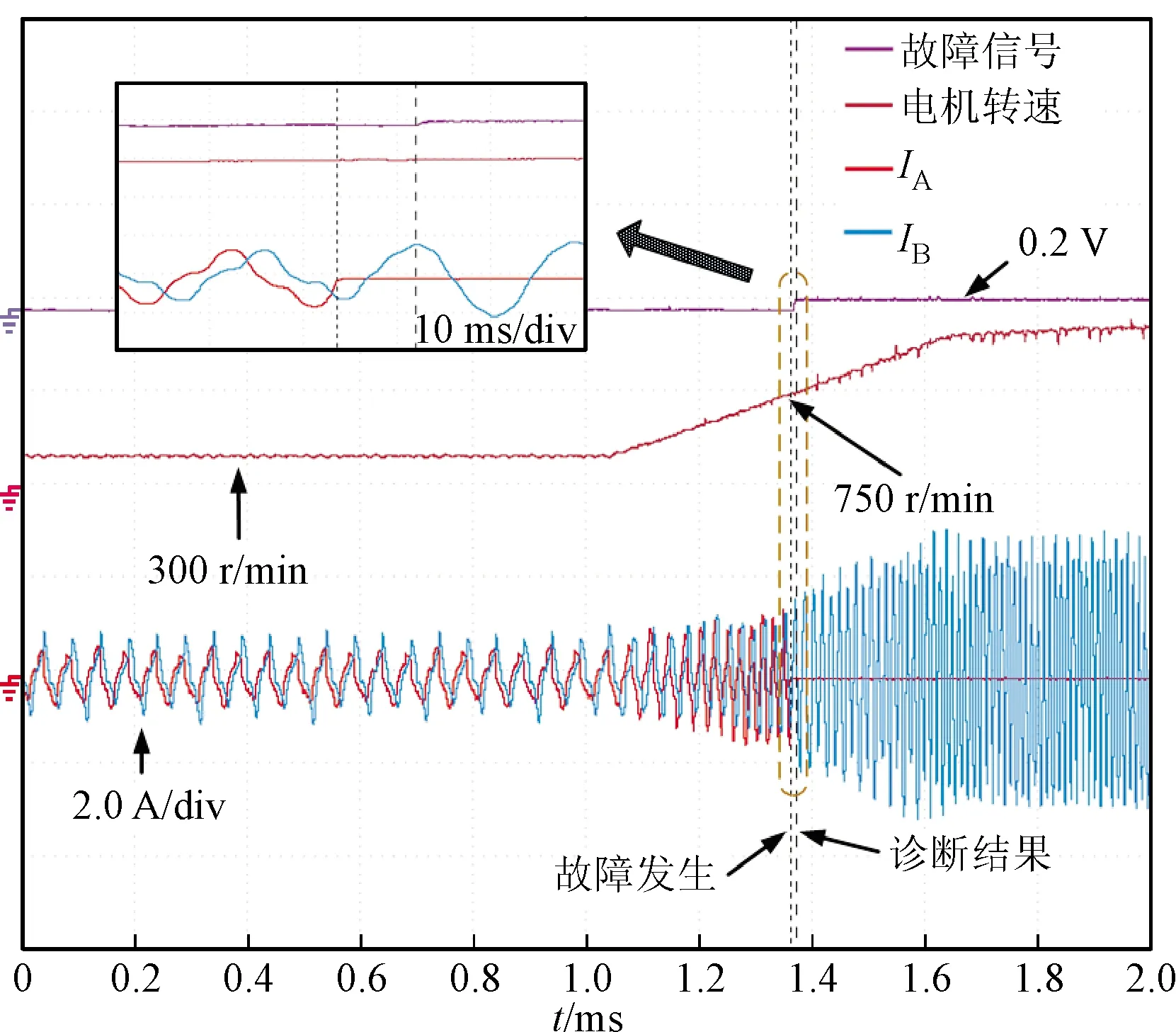
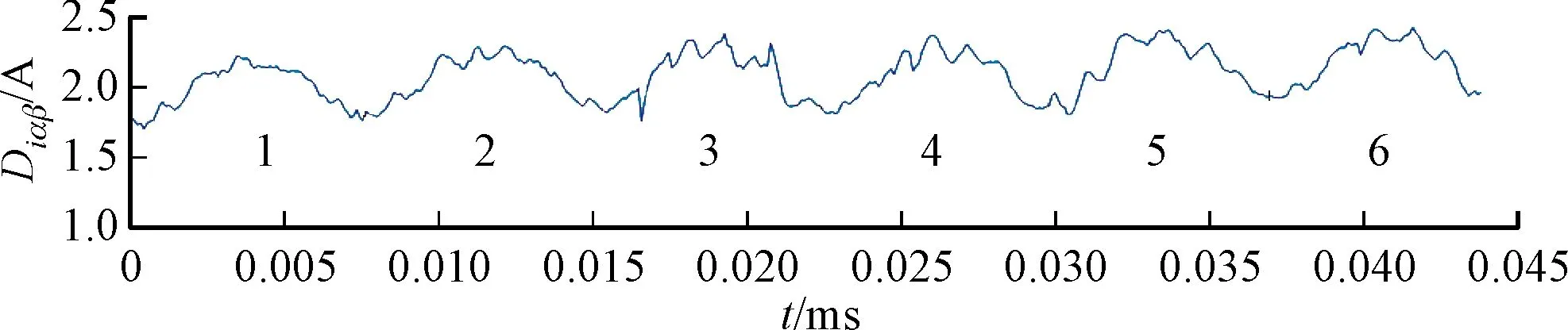
(a)電機升速,負載轉矩增加過程
兩種動態情況下基波電流到原點距離如圖12所示。可以發現,隨著轉速上升,轉矩增加,基波電流到原點距離也在不斷增加,而其在一個診斷周期內抖動的幅值差基本不變。根據采樣數據得到電機在兩種動態情況下,6個診斷周期對應的基波電流畸變率與三次諧波電流軌跡中心點,如表7所示。并且,這時每個診斷周期內三次諧波電流軌跡在d1-q1子空間分布于Ⅲ、Ⅳ象限。結合表4,可以判斷為發生了A相開路故障。
(a)電機升速,負載轉矩增加過程

表7 基波電流畸變率與三次電流軌跡中心點
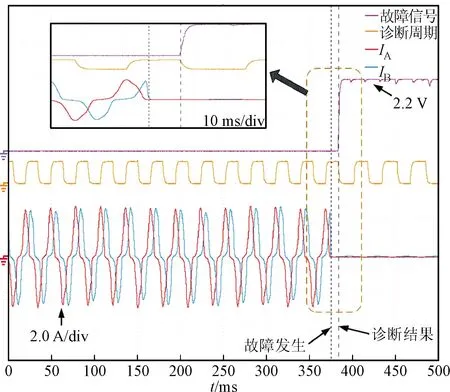
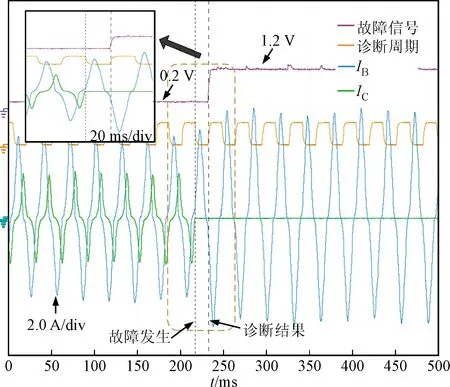
為了驗證故障診斷策略在故障狀態下的有效性,設定電機工作于A相開路故障狀態,突然斷開空氣開關模擬B相開路故障。根據圖13可知,故障發生后,B相電流等于0,C相電流增長至原來的兩倍。B相開路故障發生后,在一個診斷周期內,故障代碼從0.2 V變為2.2 V。設定電機工作于A相開路故障狀態,突然斷開空氣開關模擬C相開路故障。根據圖14可知,當發生C相開路時,C相電流等于0,B相電流大于故障發生前,一個診斷周期內,故障代碼由0.2 V變為1.2 V。

(a)500 r/min,0.9 N·m
(a)500 r/min,0.9 N·m
根據實驗波形圖8~圖11,電機無論是工作于恒定轉速(或恒定負載)的穩態,還是工作于不恒定轉速(或負載)的動態,本文擬定故障診斷方法均可實現故障的診斷與定位。圖13與圖14為FP-PMSM運行于故障狀態下的實驗波形,可以看出,在故障狀態下發生其他相故障時,本文提出的故障診斷方法亦可實現故障重新定位,對不同故障狀態具有很強的辨識度。本文提出的故障診斷方法的檢測周期由電機轉速及極對數決定,當電機轉速為500 r/min時,故障檢測周期為15 ms;當電機轉速為1 500 r/min時,故障檢測周期為5 ms。如果5個扇區內的電流采樣值以流水線的方式進行處理,可以更快地實現故障判定和定位。
5 總 結
針對FP-PMSM電驅動系統中的單相、雙相開路故障,提出了一種新的故障診斷方法,以實現快速、準確的開路故障診斷。故障診斷方法以電機轉過5個扇區時間內的五相電流采樣值作為診斷數據,減少了診斷數據的存儲量,在對診斷數據的處理過程中未涉及復雜運算,提高了診斷效率。首先,根據基波電流在α-β子空間軌跡到原點距離在一個診斷周期的變化率來判定是否發生開路故障;其次,通過坐標變化,將三次諧波電流映射在d1-q1子空間。根據開路故障狀態下三次諧波電流在d1-q1子空間的軌跡特征進行故障定位。最后,通過實驗驗證了該方法在穩態和動態情況下的有效性。
猜你喜歡
裝備制造技術(2020年3期)2020-12-25 05:22:30
汽車維修與保養(2019年7期)2020-01-06 03:30:42
北京航空航天大學學報(2016年6期)2016-11-16 01:50:43
汽車維護與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21