艦船雷達與AIS 信息融合技術
2021-04-10 04:13:20楊淑潔
艦船科學技術 2021年2期
楊淑潔,孫 偉,盧 威,王 帥,周 楊
(浙江海洋大學 海洋工程裝備學院,浙江 舟山 316022)
0 引 言
隨著海運事業的發展,船舶的噸位、數量以及水域交通密度都在不斷增加,對船運監管、船舶安全提出了新的挑戰。這些挑戰也推動了船舶信息化與智能化的發展,海上通信導航設備的種類和性能都在不斷增加、提高。雷達和自動識別系統(Automatic Identification System,AIS)是當下船上配備最多的導航設備,而且二者的信息具有一定的互補性和冗余性[1],將雷達和AIS 的信息進行融合,有利于改善船舶對周圍障礙物的探測性能、提高船舶導航信息的精度和可靠性,是未來船舶導航技術發展的重要方向。
1 雷達/AIS 信息融合技術概述
1.1 雷達和AIS 的數據特點
雷達是主動式傳感器,發送信號、接收和處理返送回來的信號,不能接收其他雷達的信號[2]。雷達可以對運動和靜止的目標進行跟蹤勘測,提供距離、方位、航速、航向等信息,并估計其大小和形狀。但雷達存在盲區,同時回波容易受到天氣、海況以及地形遮擋等影響,造成雷達目標分辨力不強、顯示虛假目標等問題。此外雷達在多目標密集區域容易出現誤跟蹤和目標丟失現象[3]。
AIS 的出現彌補了雷達的缺陷,它是被動式傳感器,通過接收AIS 信號獲取目標船舶的位置、航向、航速等動態信息,呼號、船名、船舶類型等靜態信息,以及航次相關信息和安全信息[4]。相較于雷達,AIS 的導航精度高,目標信息豐富,而且AIS 不易受位置、天氣等因素的影響,不會出現誤跟蹤和跟蹤丟失的情況[3]。但是,AIS 只能工作在甚高頻(Very High Frequency,VHF),且無法識別沒有安裝AIS 設備的目標[5]。
雷達和AIS 具有各種的優缺點,二者的信號具有冗余互補性如圖1 所示。
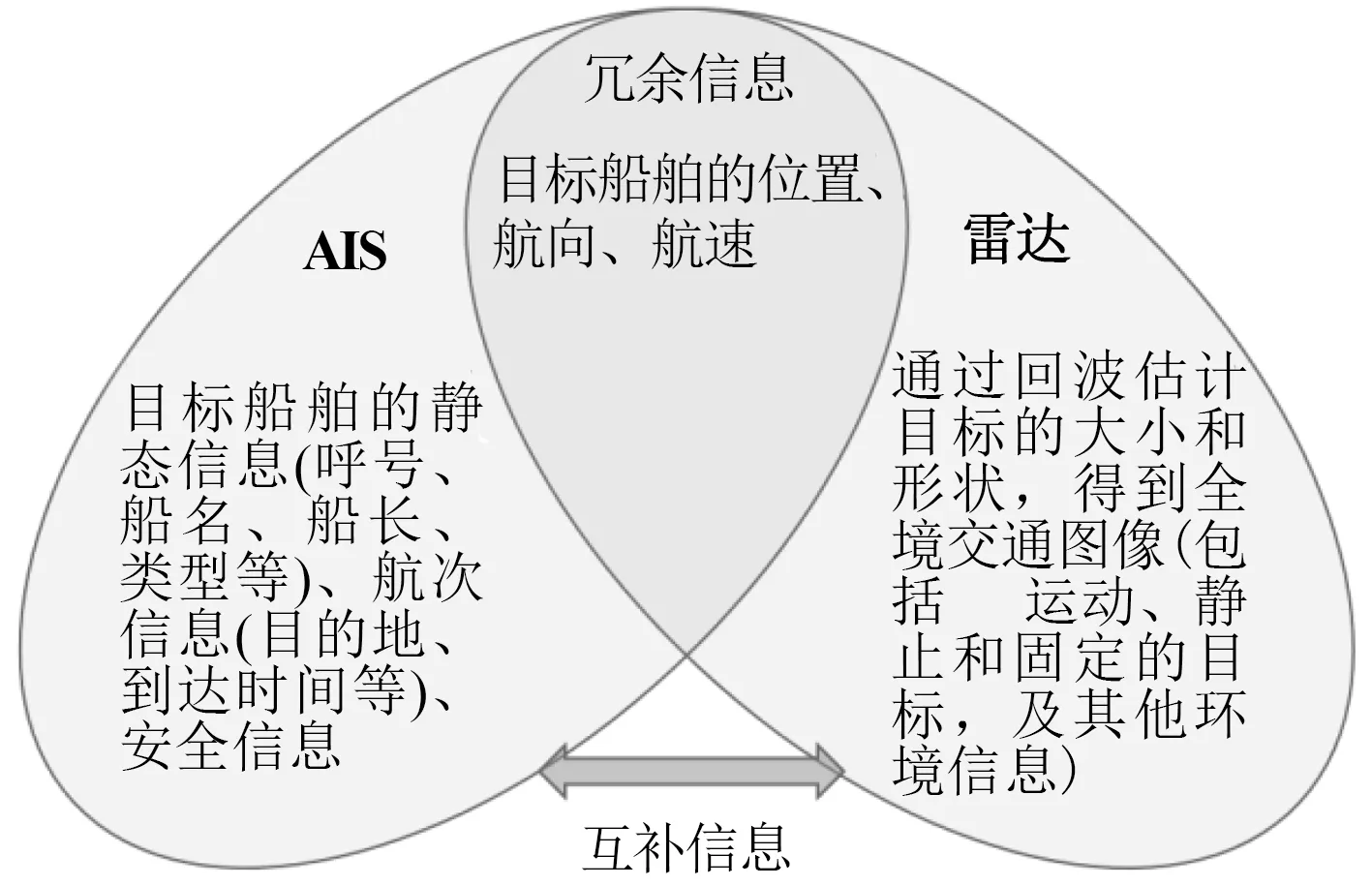
圖1 雷達與AIS 信息的冗余互補性示意圖Fig. 1 Redundancy and complementarity of radar and AIS information
1.2 信息融合的模式
如前所述,雷達與AIS 的信息具有一定的互補性,將二者融合可以取長補短,提高船舶導航系統的性能。現有的研究成果中,雷達和AIS 信息融合的模式可分為集中式、分布式和混合式[6-8],其流程圖如圖2 所示。
1.2.1 集中式融合
在對信息融合處理前,為了提高信號的質量要對雷達和AIS 的原始數據進行預處理,主要包括去除野值、點跡過濾、點跡合并。然后雷達與AIS 數據被直接送到數據融合中心,在融合中心進行時空對準、航跡關聯、航跡融合,最終得到目標狀態,集中式融合模式的流程如圖2(a)所示。集中式融合具有信息損失小、跟蹤精度高的特點,但由于數據量大,對系統的運行容量、傳輸寬帶要求高,而且計算速度較慢。
1.2.2 分布式融合
如圖2(b)所示,在分布式融合模式中,經過預處理的雷達與AIS 數據在進入信息融合中心之前,先對自身數據去除冗余信息、縮小數據范圍,得到局部多目標跟蹤航跡,然后將其傳送到數據融合中心,由數據融合中心完成航跡關聯和融合,最終得到目標航跡狀態。分布式融合模式輸到融合中心的數據量明顯減少,降低了對系統運行容量、傳輸寬帶的要求,計算速度快,但信息損失也使得精度也有所降低。
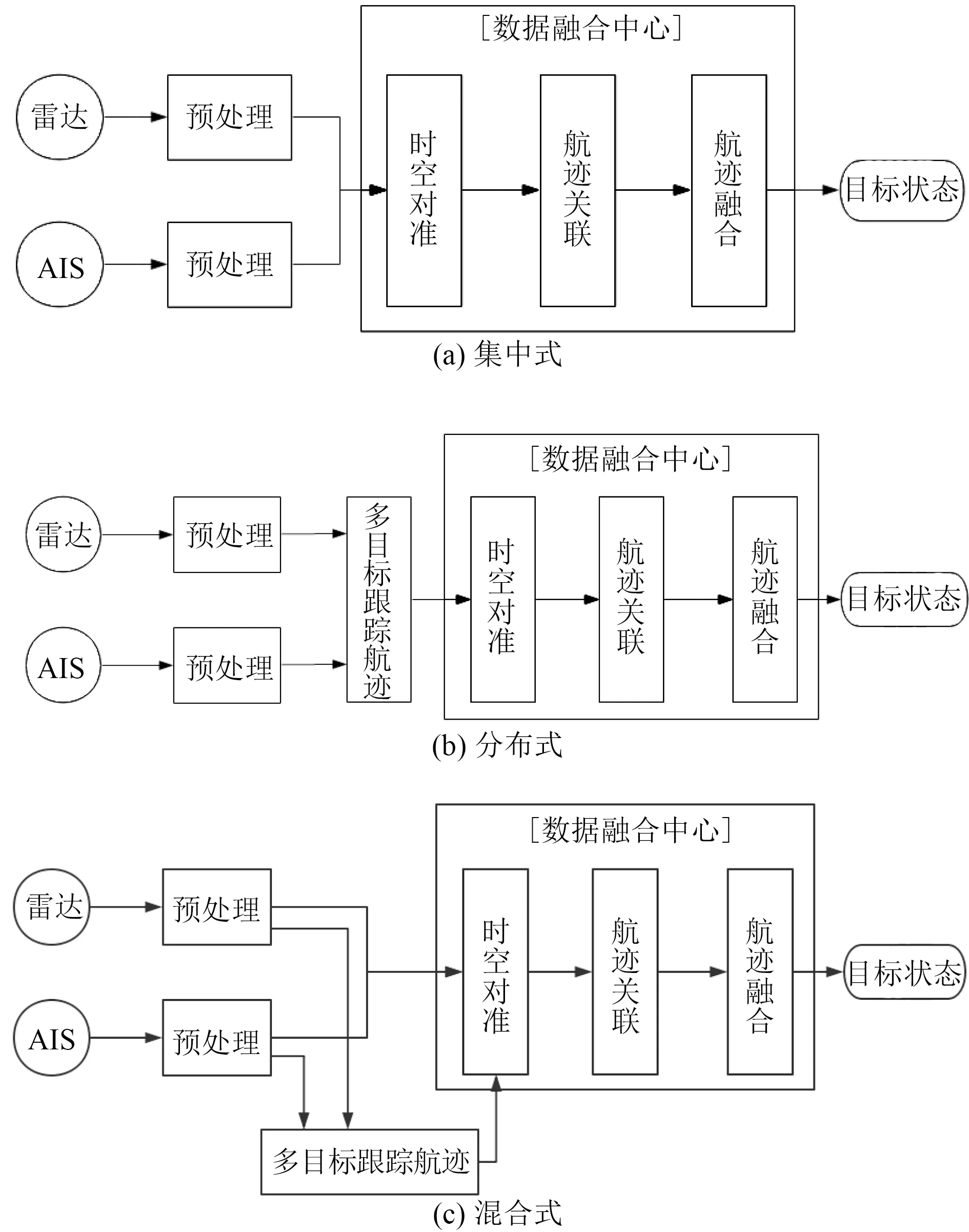
圖2 雷達和AIS 信息融合模式Fig. 2 Radar and AIS information fusion models
雷達與AIS 都有各自獨立的信息處理系統,所以分布式融合模式在沒有增加系統復雜度的情況下提高了系統的實時性和可靠性,因此在實際中通常采用分布式模式。
1.2.3 混合式融合
如圖2(c)所示,混合式融合結合了集中式和分布式的融合特點,即融合中心同時接收會接收雷達與AIS 數據和經局部處理的多目標跟蹤航跡。混合式融合兼有以上2 種融合結構的優點,具有精度高,數據利用率高的特點,但傳輸數據量大,系統結構復雜、造價昂貴。
2 雷達/AIS 信息融合關鍵技術
2.1 信息準備
雷達和AIS 輸出異構數據,信息融合前要進行信息的準備,實現坐標和時間統一。信息準備主要包括坐標變換和時間對準。
2.1.1 坐標變換
雷達使用以雷達為中心的極坐標系,目標位置數據是用極坐標 (R,θ)表示;AIS 檢測的目標位置用WGS-84 地理坐標 (L,B)表示。為了實現坐標統一,需要選取系統坐標系,并將雷達和AIS 的數據變換到系統坐標系。常用的坐標變換方法有3 種:一是以雷達的極坐標為系統坐標系[9],二是以本船為原點的直角坐標系為系統坐標系[10],三是以地心坐標系為系統坐標系[11]。其中,第2 種方法具有計算簡單、精度高的特點,有利于海量數據的快速處理和后續航跡融合,因此被廣泛用于雷達、AIS 信息坐標變換,下面介紹其具體變換過程。
如圖3 所示,系統坐標系的原點Oz為本船位置,Xz軸、Yz軸分別指向東經和北緯方向。Ma和Mr分別AIS 與雷達探測到的目標,獲取的坐標分別為 (R,θ)和(L,B)。坐標變換就是要得到這2 個目標在系統坐標系中的坐標值 (xa,ya) 和(xr,yr)。
Michael Mauer:創新的先決條件是在現實與可能性中進行思考,所以設計師既可以發散思維,也可將思維匯聚一起;他們是非傳統的橫向思考者,也是有著明確目標的長遠思考者。基本上,設計師需要預知不明確的未來,并最大限度發揮自身的即興創作能力。在我看來,設計師即能讓工作變得理性,又能充滿感性地發揮自己所擅長的本領來進行設計。
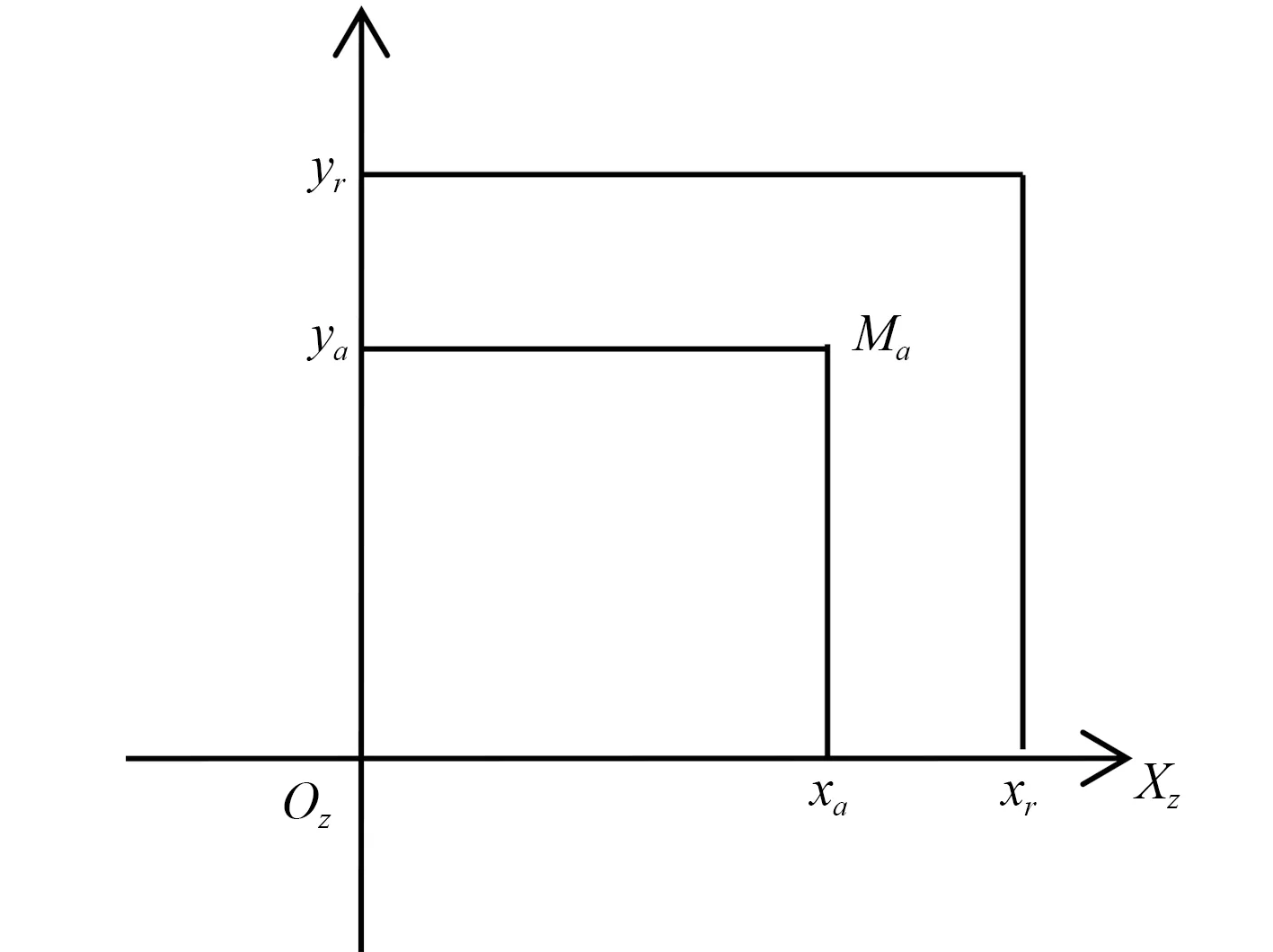
圖3 以本船為原點的直角坐標系Fig. 3 Cartesian coordinate system with own ship as origin
1)雷達目標位置數據的坐標轉換
雷達數據的坐標原點為雷達,不失一般性可假設與本船位于同一點。因此,雷達探測目標的極坐標(R,θ) 轉換到系統坐標系,得到點Mr的直角坐標[12-13]:

2)AIS 目標位置數據的坐標轉換
為了將AIS 目標的坐標轉換到系統坐標系,要先將WGS-84 坐標系下的坐標轉換到直角坐標系下,主要有高斯-克呂格投影和墨卡托投影2 種方法[10-12]。高斯-克呂格投影是一種等角橫切橢圓柱投影。利用高斯-克呂格方法投影時中央經線不會發生變形、計算精度高[14-15]。墨卡托投影是一種正軸等角圓柱投影。墨卡托方法在投影過程中經緯線均為直線,使得投影圖像更為直觀,而且該方法公式結構簡單,計算量小[16-17]。
通過上述2 種投影方法得到本船與目標船舶的直角坐標后,再用目標船舶坐標減去本船坐標,就可以得到目標船舶相對于本船的位置信息,也就是目標船舶在系統坐標系中的坐標 (xa,ya)。
2.1.2 時間對準
雷達的掃描周期為2~4 s,AIS 為2~3 min[17],加上信息傳輸存在延遲,二者的信息是不同步的。而異類傳感器進行信息融合時必須進行時間對準。進行時間對準,必須要保證雷達與AIS 數據的起始時間相同。由于雷達的掃描周期是比較固定的,而AIS 的數據周期會隨船舶的狀態發生變化,因此一般將雷達的采樣時刻作為時間對準的起始時間基準。
國內外學者提出了許多時間對準的方法,常用的有內插法、三次樣條插值法、最近鄰規則中心聚類法[18-21]。內插法簡單易行,執行效率高,但是在利用內插法進行時間對準時需要假設船舶是勻速直線運動,這與海上航行船舶的實際狀態不符。當目標船舶處于機動狀態時,三次樣條差值的精度比內插法高,但是計算較為復雜。而最近鄰規則中心聚類法與上述2 種方法相比,計算就更為簡單、快速,但是,對雷達的數據進行配準時,明顯不如三次樣條插值法[10]。
2.2 航跡關聯
國內外學者提出的航跡關聯算法分主要有兩大類:一種是基于統計的方法,包括距離-速度航跡關聯算法[4]、最近鄰 (NN)航跡關聯算法[22]、修正的近鄰域(MK?NN)算法[23]、加權法[24]、修正法[25]等;另一種是基于模糊數學的方法,包括模糊雙門限法[26]、基于多因素模糊綜合決策的航跡關聯算法[16]、基于神經網絡算法[27]、柯西型隸屬度函數法[28]、模糊C均值聚類算法[29]等。
文獻[4]研究了距離-速度綜合細關聯算法,易于工程實現,正確關聯的概率較高。劉社[16]提出了基于歷史航跡的航跡關聯算法,簡化了距離較近的航跡間的關聯問題,但是未考慮對于相距較遠的航跡關聯問題。文獻[10]采用了多因素模糊綜合決策的航跡關聯算法,在對雷達和AIS 進行T?D航跡粗關聯后在進行模糊綜合決策關聯,該算法提高了航跡信息處理的效率,使航跡融合的整體性能提高,但是計算量較大。張景鵬等[9,30]采用多因素模糊-灰色關聯綜合的自適應閾值關聯算法,提高了計算效率和算法質量,減少計算量,但是算法的實現比較復雜。文獻[27]采用基于神經網絡的航跡關聯算法,主要解決密集、交叉及機動情況下的多目標航跡關聯問題。夏光帥[22]提出了一種基于圖和灰色理論的多傳感器航跡關聯算法,可以濾除與目標航跡無關航跡,提高航跡關聯的效率。
2.3 航跡信息融合
為了使獲得的航跡信息更加精確可靠,需要將來自航跡關聯檢驗確定為同一目標的航跡信息進行航跡融合處理。目前,雷達和AIS 目標航跡融合的算法主要有神經網絡算法[11]、卡爾曼濾波法[31]、加權平均融合算法[32-33]、加權協方差航跡融合算法[10]和自適應加權航跡融合算法[4,20]。
文獻[16, 34]提出了一種基于航跡質量的自適應加權航跡融合算法,仿真結果表明融合后的系統航跡比單一航跡的具有更好的質量和可靠性。劉麗娜[4]采用了改進的自適應加權航跡融合算法,提高了航跡融合的精度,使融合后的航跡更加接近于真實運動軌跡。王晨曦[10]提出了改進的基于加權協方差航跡融合算法,分別針對航跡距離較近與較遠時的算法進行改進,降低了航跡融合算法的復雜程度并提高了運算效率。文獻[33]采用基于最小方差原則的統計加權平均算法進行雷達和AIS 航跡融合,融合后的航跡目標信息更加接近真實目標航跡。劉加歡[23]提出了一種基于修正的卡爾曼濾波的航跡融合算法,該算法在融合航跡的同時還具有平滑濾波的效果。文獻[9]采用一種最優加權因子自適應加權航跡融合算法,提高了航跡融合的精度,但計算較復雜。
3 雷達與AIS 的信息融合的研究展望
國內外學者對雷達與AIS 信息融合的研究已經取得了一定進展,但是仍有許多問題有待于進一步研究。
3.1 目標密集環境下的航跡融合
目標密集環境下的航跡融合問題是一個具有挑戰性的課題,在目標密集環境下,被探測的目標數量很多,且目標運動方式復雜多變。在信息容量巨大、信息之間的關系復雜的情況下,有許多挑戰性的問題有待解決,如目標密集和航跡交叉環境下的關聯正確率低、傳感器開機時機及采樣周期不同導致的航跡信息異步不等速率等問題,對航跡關聯性能的影響;多目標跟蹤與航跡關聯的聯合優化問題;系統誤差對狀態估計和航跡關聯的影響等。
3.2 信息融合處理算法
雷達與AIS 的信息融合也有很多問題需要解決,如現有算法計算量大,不利于工程實現;只對算法進行了仿真分析,并未用大量實際數據進行驗證;在神經網絡與模糊理論方面的研究還比較少等問題。
3.3 智能化自動避碰系統
隨著人工智能技術的不斷發展和計算機技術水平的不斷提高,研究基于AIS/雷達信息融合的集成化、智能化自動避碰系統,利用AIS 與雷達信息實現船舶目標識別跟蹤、進行智能自動避碰決策,是今后減少或避免海上碰撞事故發生的重要研究方向。
4 結 語
本文對雷達與AIS 信息融合技術進行了系統的闡述,包括雷達、AIS 信息特點比較、信息融合模式與關鍵技術發展情況的概述,重點闡述了航跡關聯和信息融合2 項關鍵技術的研究現狀。在此基礎上,從目標密集環境下的航跡融合和信息融合處理算法2 個方面分析了目前雷達與AIS 信息融合研究領域存在的主要問題,展望了雷達與AIS 信息融合技術在智能化自動避碰領域的發展前景。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
今日農業(2021年19期)2022-01-12 06:16:36
當代陜西(2021年17期)2021-11-06 03:21:36
船舶(2021年4期)2021-09-07 17:32:22
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
現代出版(2020年3期)2020-06-20 07:10:34
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
學苑創造·A版(2018年11期)2018-02-01 06:29:20
讀者(2017年5期)2017-02-15 18:04:18