水下單層圓柱殼振動聲輻射預報的測點布置改進方法
2021-04-10 04:09:06張曉宇杜兆偉
艦船科學技術 2021年2期
余 鵬,張曉宇,陳 杰,杜兆偉,殷 洪
(武漢第二船舶設計研究所,湖北 武漢 430205)
0 引 言
在水下航行器的初步設計階段,對其主要組成的圓柱殼結構進行聲振響應預報,可以為結構的聲學優化設計提供理論基礎[1-2]。
在實際工程中,為了對結構振動數據進行采樣,需要在結構表面布置相關傳感器,但在整個結構上均布置傳感器實施難度大、不現實。所以,通過一種好的測點布置方法,實現較少數目的傳感器對結構聲振響應的準確預報就顯得非常重要。目前,國內研究人員基本是采用均勻布置方法[3-7],這種方法簡單易行,但測點數目及位置的選擇存在較大的主觀性和盲目性,且需借助大量的數值分析算例。
幾十年來,學者們根據自然界中的生物進化或物理演變過程,提出了很多基于概率變換來實現最優組合的隨機類算法,如遺傳算法等[8]。這類算法可在全域內進行搜索,不易陷入局部最優解,比較適合解決組合優化類的問題,但也存在收斂速度慢、迭代次數多、計算效率有待改善等缺點。
針對圓柱殼結構的測點布置問題,本文提出一種改進方法—均勻子集隨機選取測點方法:將所有待選測點分成相互獨立的均勻子集,子集數量與測點數量保持一致,測點從各個子集中隨機選取,再利用設定的目標函數對隨機選取的測點組進行評價,從而選擇出好的測點布置方案。這種測點布置改進方法不僅具有均勻布置方法中取樣全面、操作簡單等優點,同時通過劃分子集進行隨機選擇,可避免選擇范圍廣、收斂速度慢、迭代次數多等缺點。
根據模態疊加原理,可將結構振速展開為模態疊加的形式,再利用均勻子集隨機選取方法得到的測點布置方案,與均勻布置方法對比。通過上述不同測點布置方案得到的水下圓柱殼振動聲輻射預報結果對比表明,均勻子集隨機選取測點方法是一種優秀的測點布置方法。
1 基本理論
1.1 模態疊加理論
水下彈性結構振動響應方程如下:

其中:M為質量矩陣;C為阻尼矩陣;K為剛度矩陣;p(t)為 流體與結構交界面上的流體載荷;f(t)為除了p(t)以 外的外界激勵;x(t)為結構各節點的位移向量。
經拉普拉斯變換可得:

將結構振速展開為如下形式:

式中:V為結構速度矢量; ?r為第r階模態振型;qr為第r階模態坐標。
速度與位移的關系如下:

結合式(2)~式(4)可得:

式中:ms=?Ts M?s為模態質量,cs=?TsC?s為模態阻尼,ks=?TsK?s為模態剛度。
由此,可得第S階模態坐標為:

當阻尼及外部激勵均為0 時,式(5)可表示如下:

式中: ωr為結構在空氣中的固有頻率。對式(7)進行質量歸一,即ms=?sTM?s=1,可得:

根據式(7),當結構處于流體介質中時,其對結構振動影響可表示成附加質量的形式:

式中: ?ms為模態附連水質量; ωs為結構水中模態的固有頻率。
結合式(7)~式(9),可得:

即可通過式(10),對結構空氣和水中的振動固有頻率進行轉換。
1.2 均勻子集隨機選取測點方法
均勻子集隨機選取測點包含以下3 個方面內容:
1)子集劃分
將所有待選測點劃分成相互獨立的均勻子集,子集數量與測點數量保持一致。并且可根據結構形狀選擇合適的子集劃分方式,針對本文中的單層圓柱殼結構,可沿軸向和周向進行劃分,圖1 所示將圓柱殼沿軸向分成了4 個子集,圖2 所示將圓柱殼沿周向分成了8 個子集,子集的表示方式為AiBj(i=1,···,4;j=1,···,8), 子集A1和A2交 界處的節點視為子集A1中的節點,子集B1和B2交 界處的節點視為子集B2中的節點。

圖1 沿軸向劃分子集示意圖Fig. 1 The axial subset
2)測點選取
從每個子集中隨機選擇一個測點形成測點組合,并且引入循環策略,循環選擇的次數應足夠多,以保證能夠大概率的選到子集中每一個待選測點。
3)目標函數設定
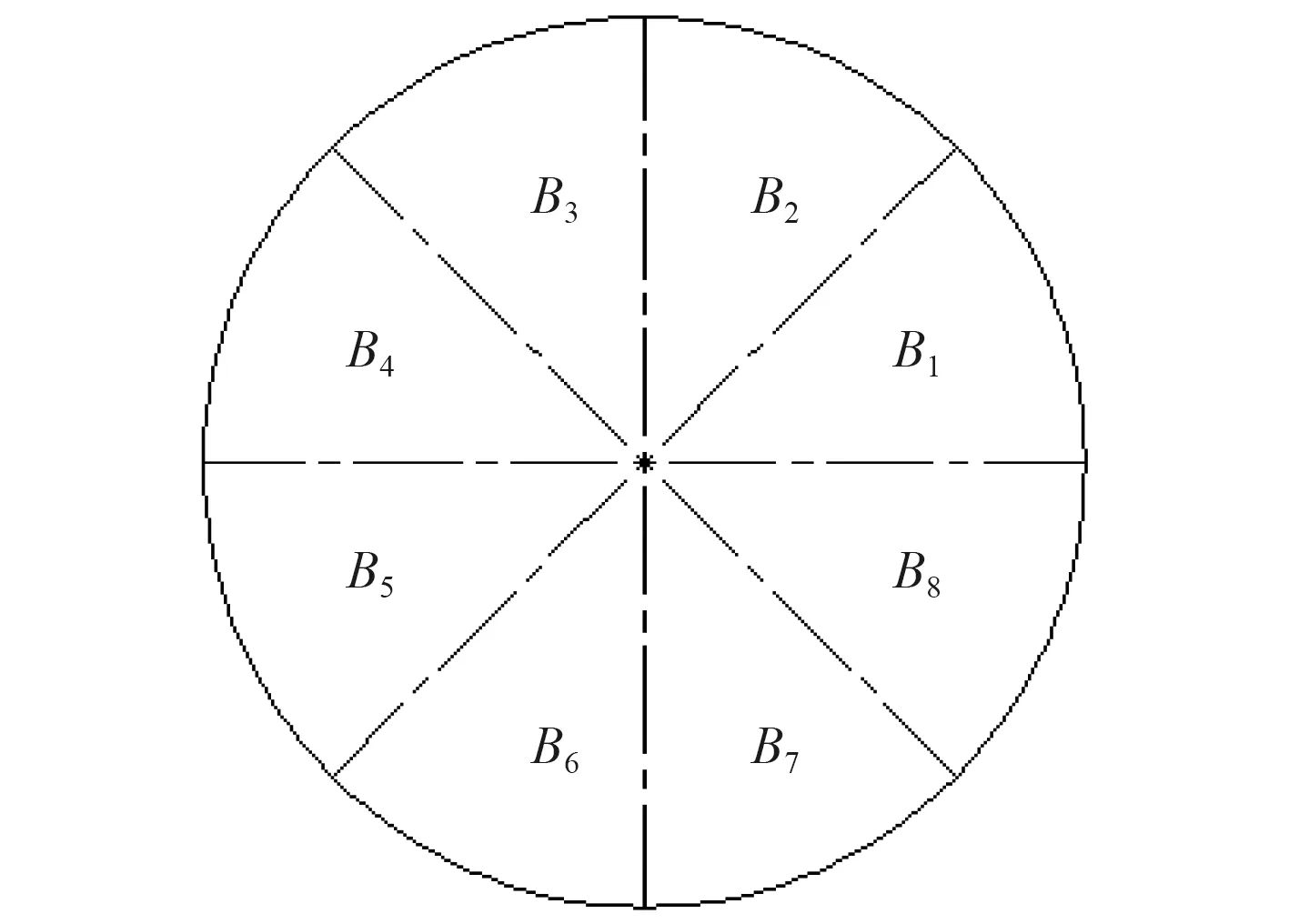
圖2 沿周向劃分子集示意圖Fig. 2 The circumferential subset
由于每個測點均是從對應子集中隨機選取,所以通過設定目標函數,對選取的測點組合進行評判。可根據實際情況設定合適的目標函數,本文將測點組模態矩陣的MAC 值[9-10]作為目標函數,如下式:

式 中: ?i為第i階模態向量; ?j為第j階模態向量;MAC值為模態向量的余弦值,其值越小,模態向量的空間夾角就越大,對應振型越易識別。
本文通過計算不同測點組的模態矩陣MAC值,從而選擇MAC值最小的測點組,再對水下單層圓柱殼結構的振動聲輻射進行預報,以驗證本文方法的準確性。
1.3 振動聲輻射預報基本理論
假設模態階數為N,節點數為n,以矩陣形式將振速在模態空間中展開如下:

根據式(12),若測點數為M個,則測點振速可表示如下:

已知測點振速 [V]M×1, 和前N階模態向量 [Φ]M×N,根據式(13)可求解得到模態坐標,進而通過式(12)可得到結構表面所有節點振速 [V]n×1,再結合邊界元法得到的聲傳遞矢量ATV,即可求解輻射聲壓如下:

2 數值分析
2.1 有限元建模
本文中的單層圓柱殼結構相關參數如下:
總 長L=1.2 m, 半 徑R=0.4 m,殼 體 厚t=0.01 m ,密 度 ρ=7 800 kg/m3,彈 性 模 量E=210 GPa,泊 松 比μ=0.3,阻尼比ξ =0.005,尺寸如圖3 所示。

圖3 結構尺寸示意圖Fig. 3 The structure size
對結構兩端面上的節點約束橫向和垂向位移,在結構中間正下方作用一垂向單位力。同時在距離結構100 m 處,與激勵力相同方向和垂直方向分別布置1 個聲壓場點,如圖4 所示。
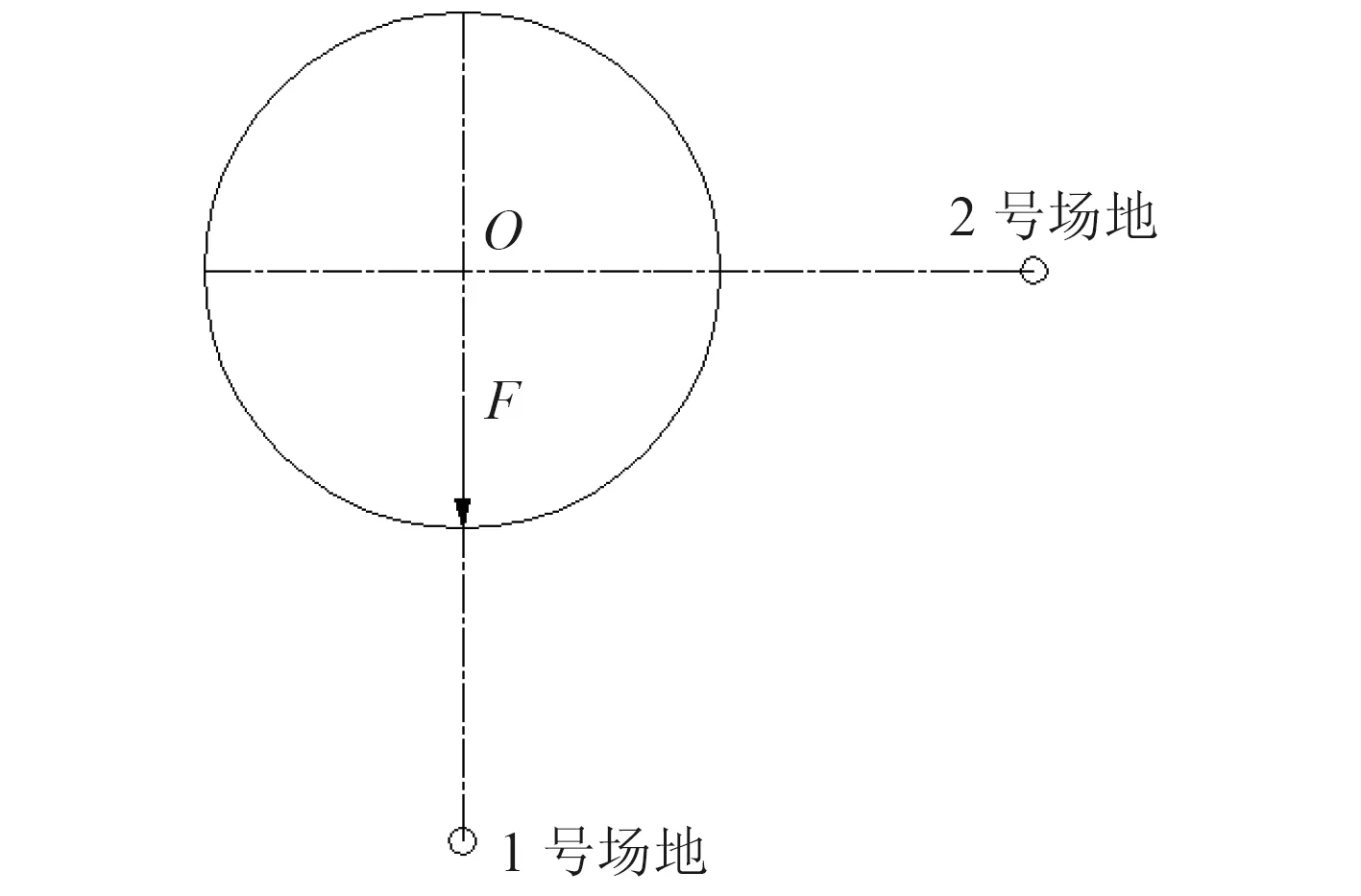
圖4 聲壓場點位置示意圖Fig. 4 The sound pressure field point
采用Ansys 軟件對結構進行有限元建模,在軸向和周向分別劃分24 和48 個網格,頻率分析范圍由2~1000 Hz,間隔2 Hz。有限元模型如圖5 所示。
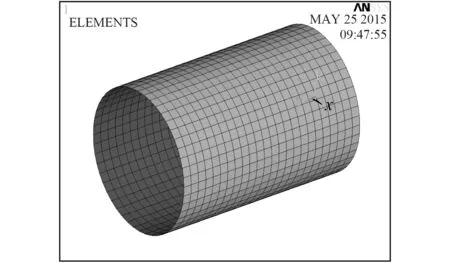
圖5 結構有限元模型Fig. 5 The structural finite element model
2.2 模態分析
根據上述理論分析,結合有限元軟件,可得到結構的模態分析結果如表1 所示。
根據上表分析結果,第47 階空氣振動模態對應的水中頻率已達1000 Hz 以上。為了避免頻率范圍內的模態遺漏,本文選取了空氣中前100 階模態進行分析。
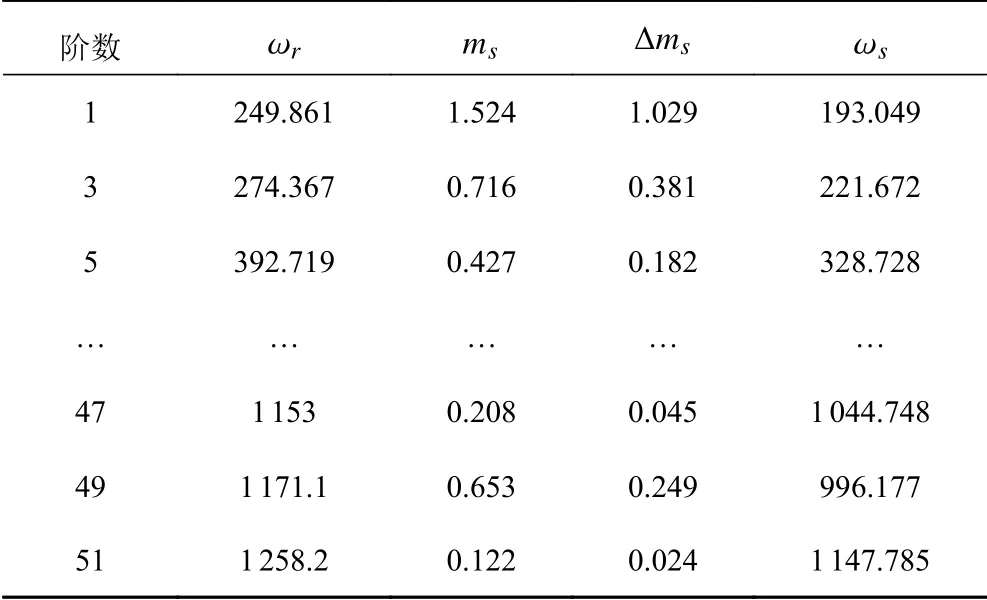
表1 固有頻率換算表Tab. 1 Natural frequency conversion table
2.3 振動聲輻射預報
為驗證本文方法的準確性,開展對比分析。
1)均勻測點布置
目前,均勻測點布置方法在圓柱殼結構振動采樣中應用最為廣泛,所以,本文先針對這種方法預報結構振動聲輻射開展分析研究。
根據上述建模情況,模型總的節點數目為1200,去除邊界節點,其余均可作為待選測點,共計1104 個待選測點。按照測點布置的疏密程度不同,本文設計了以下3 種方案:方案1 的測點總數為264,其中軸向11 排,周向24 列,測點布置較為密集;方案2 相比方案1,將軸向測點減為6 排,周向測點不變,測點總數144;方案3 相比方案2,軸向測點不變,將周向測點減為12 列,測點總數72。
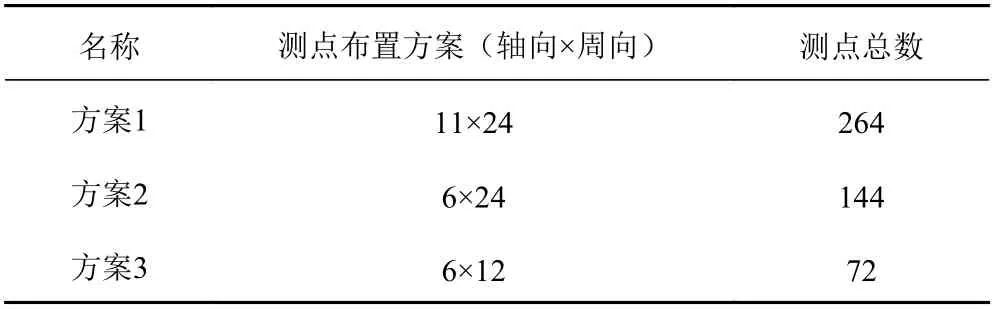
表2 三種均勻布置方案對比Tab. 2 Comparison of three uniform layout schemes
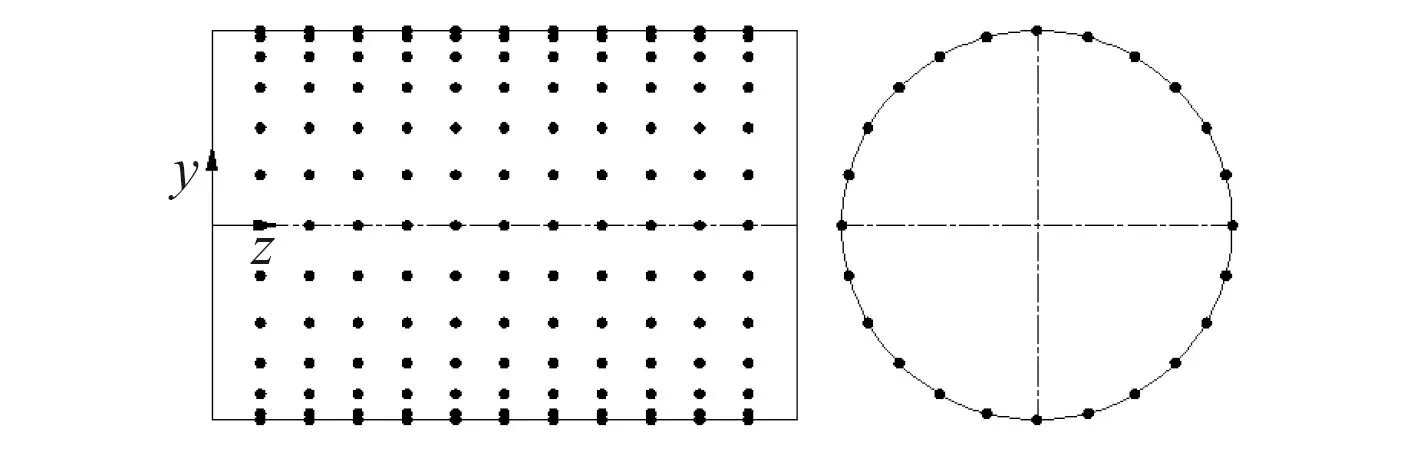
圖6 均勻布置方案1Fig. 6 The first uniform layout scheme
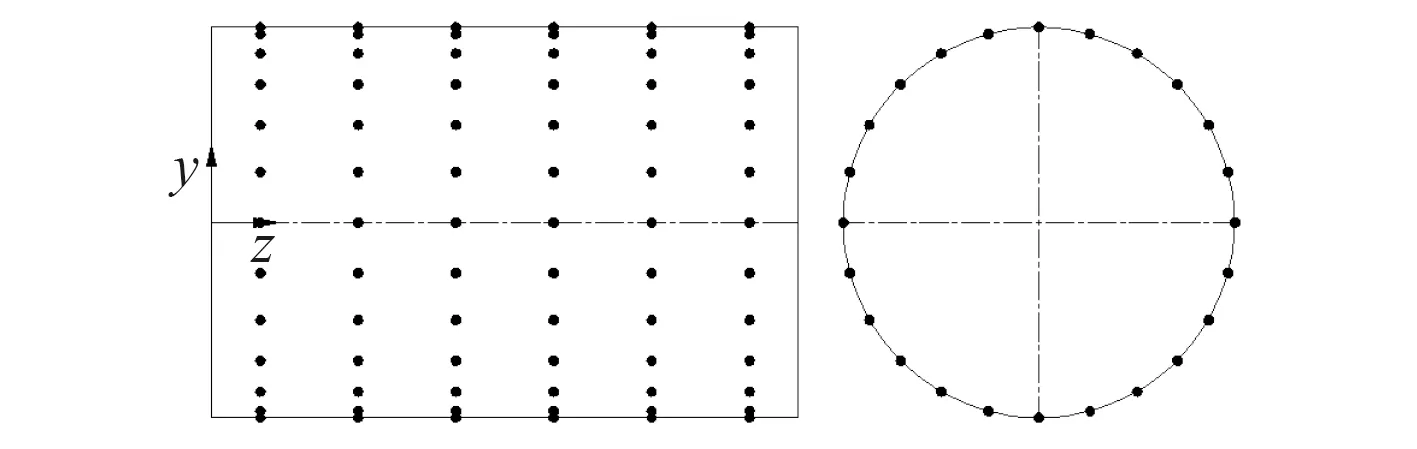
圖7 均勻布置方案2Fig. 7 The second uniform layout scheme
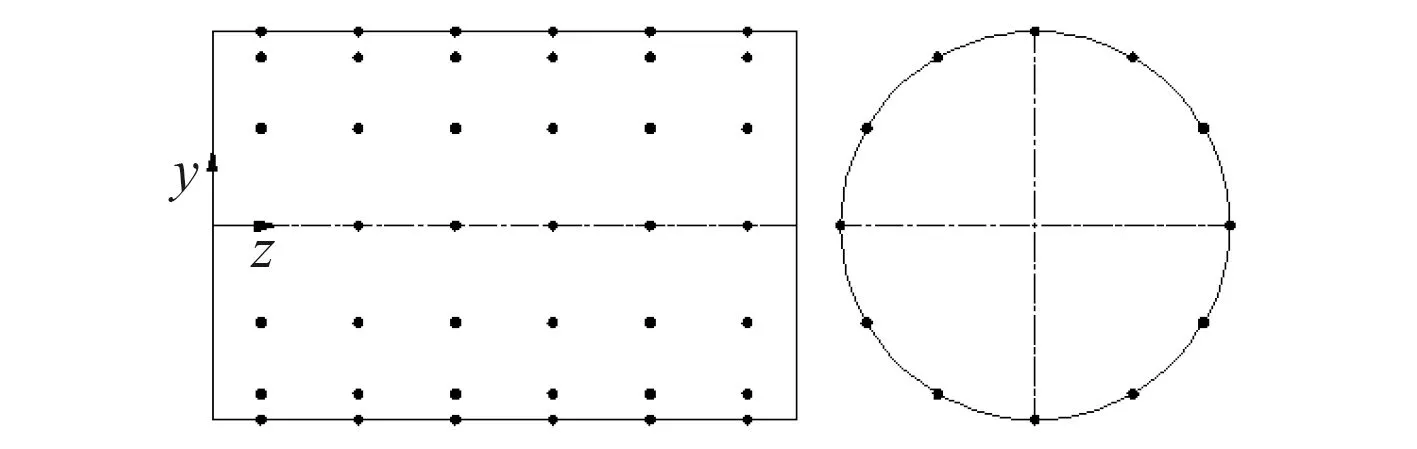
圖8 均勻布置方案3Fig. 8 The third uniform layout scheme
根據截斷的前100 階空氣中模態、及上述3 種均勻測點布置方案,通過式(13)對結構表面振速場進行重構。其中方案1 和方案2 的測點數目M大于模態數目N,采用最小二乘法求解;方案3 的測點數目M小于模態數目N,采用欠定分離法解決解的非唯一性問題。根據重構的結構表面振速,結合邊界元法求得的聲傳遞矢量ATV,通過式(14)便可得到各個場點的輻射聲壓,如圖9~圖11 所示。

圖9 均方振速對比結果Fig. 9 The change curve of square vibration velocity

圖10 1 號場點輻射聲壓對比結果Fig. 10 The radiated sound pressure of field point No.1
通過對比上述結果可知,在分析頻段內,方案1和方案2 的預報結果精度更高,且方案2 的預報結果已基本達到收斂,但方案3 的預報結果精度明顯降低。
2)均勻子集隨機選取測點布置

圖11 2 號場點輻射聲壓對比結果Fig. 11 The radiated sound pressure of field point No.2
根據上述理論分析,該方法將所有待選測點分成相互獨立的均勻子集,子集數量與測點數量保持一致,從每個子集中隨機選擇一個測點形成測點組合,再通過目標函數對每種測點組合進行評價,從而選擇出好的測點布置方案。
以上述方案3 為參照,對應其測點布置方案,本文將結構沿周向劃分了12 個子集,軸向劃分了6 個子集,劃分的子集總數為72 個,如圖12 和圖13 所示。在循環策略中,為了盡可能選到每一個待選測點,本文將循環次數定為單個子集中待選測點數目的10 倍,考慮單個子集中最多有16 個待選測點,相應需進行160 次循環操作。再根據式(11)中設定的目標函數,當目標函數MAC 值為0.1461 時達到最小,其對應的測點布置方案如圖12 和圖13 所示。利用該組測點對結構振動聲輻射進行預報,得到的預報結果與均勻布置方法對比曲線如圖14~圖16 所示。
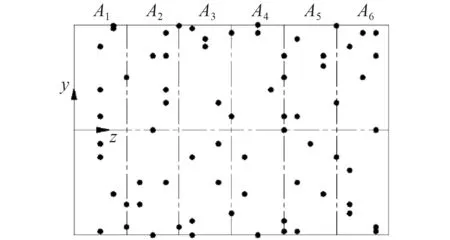
圖12 軸向測點分布示意圖Fig. 12 The axial measuring point distribution
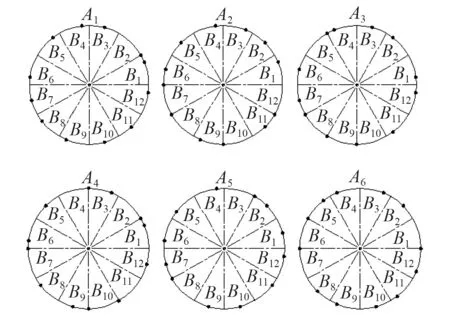
圖13 周向測點分布示意圖Fig. 13 The circumferential measuring point distribution
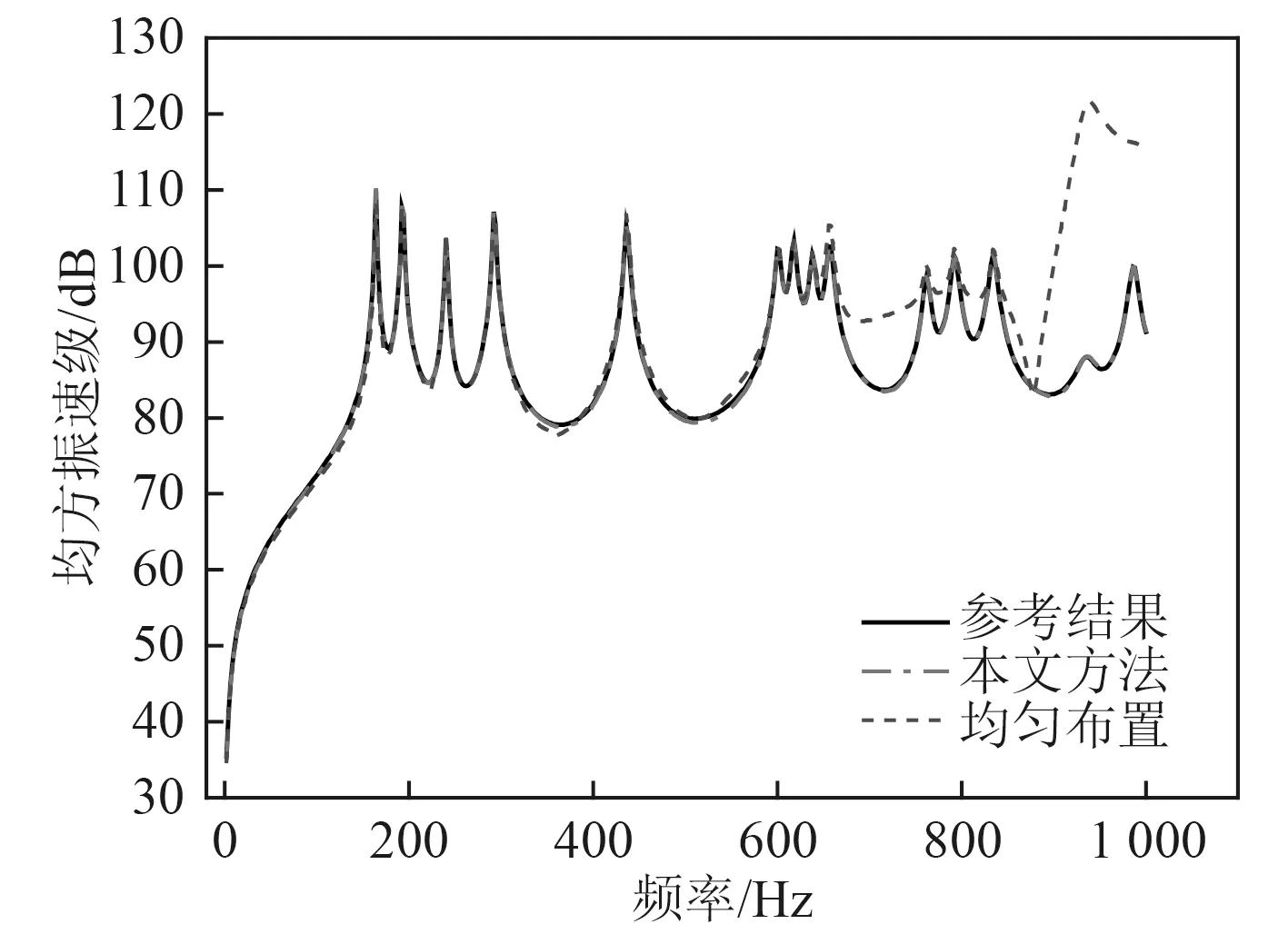
圖14 均方振速對比結果Fig. 14 The change curve of square vibration velocity
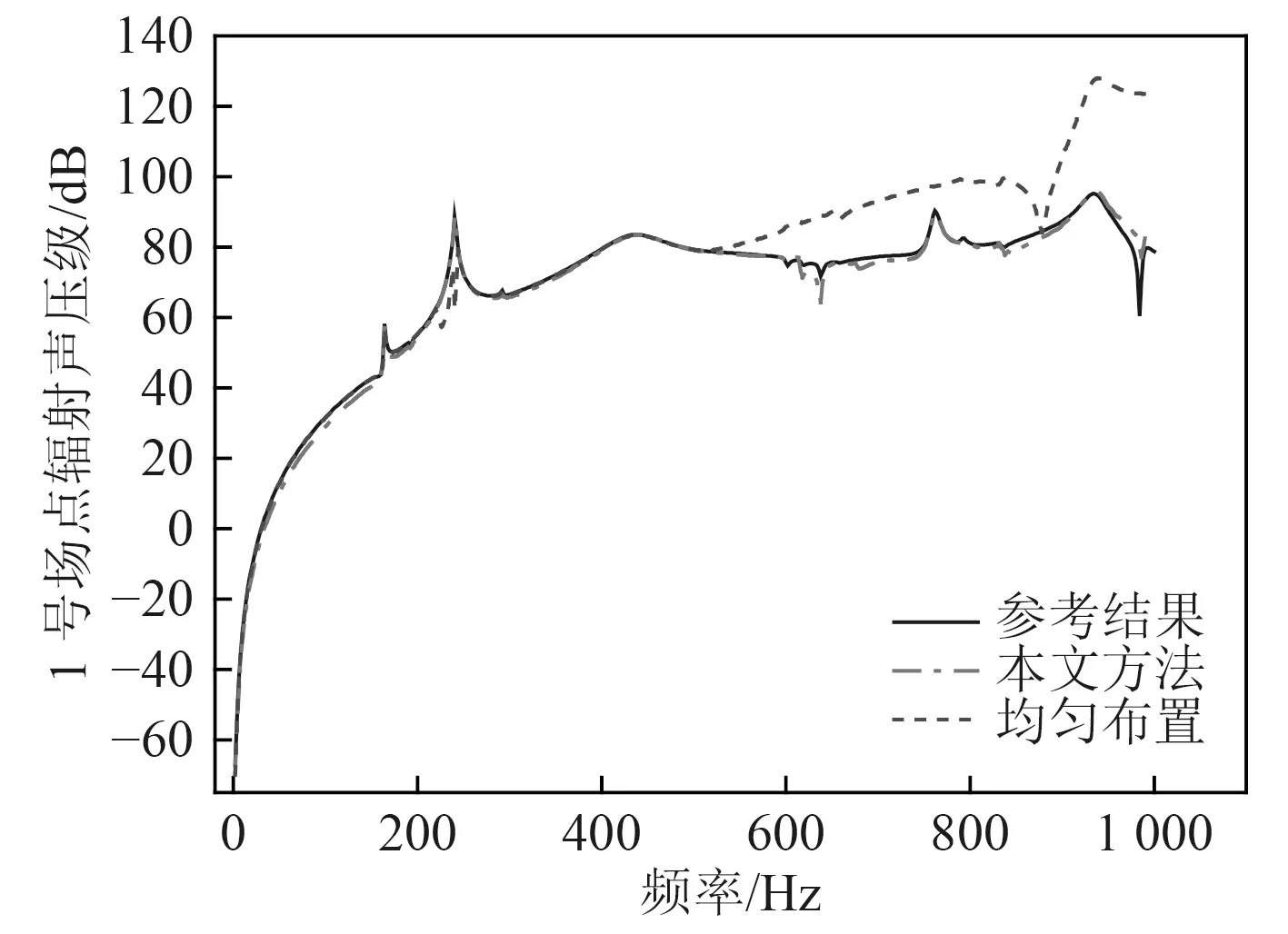
圖15 1 號場點輻射聲壓對比結果Fig. 15 The radiated sound pressure of field point No.1
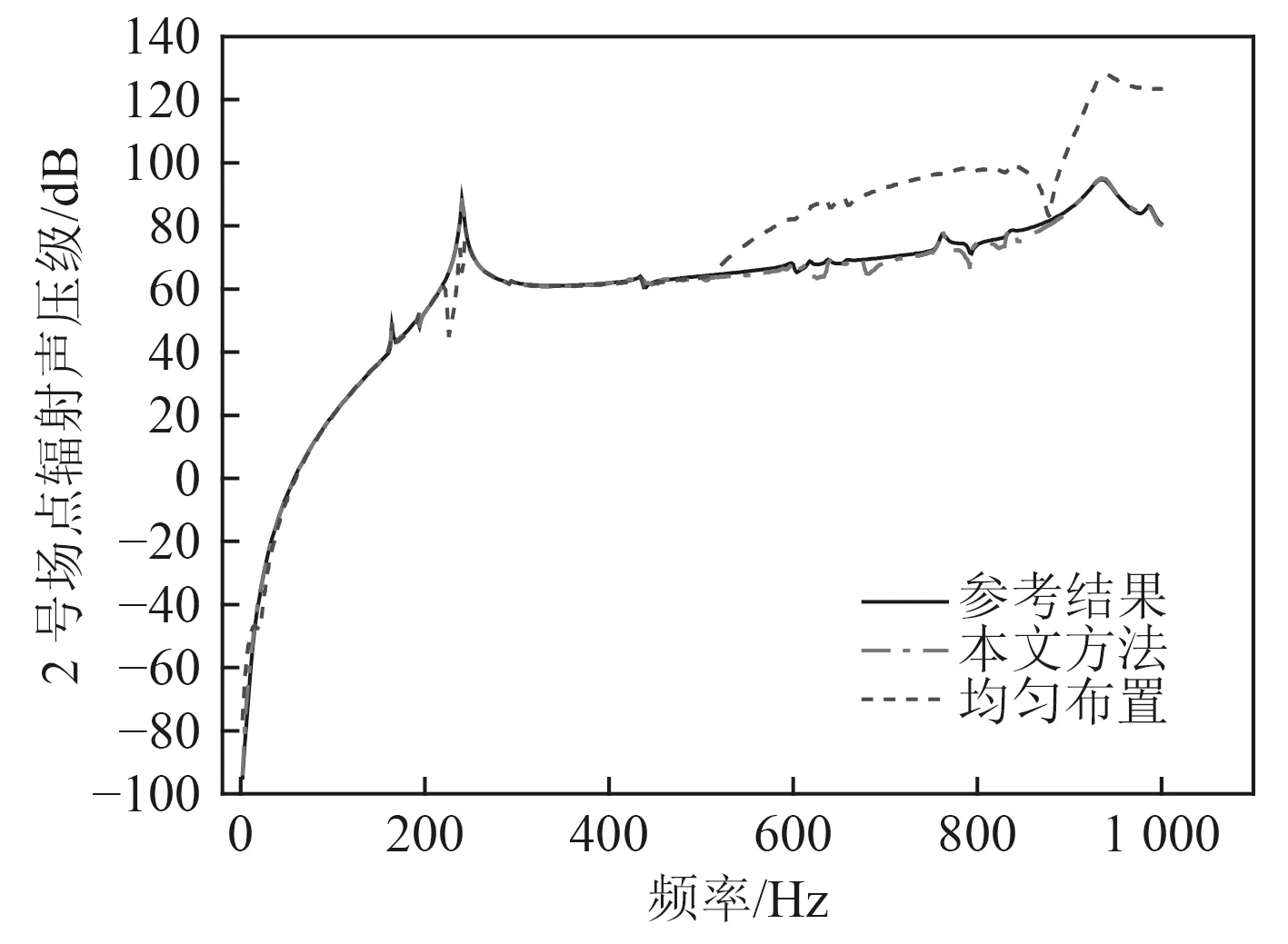
圖16 2 號場點輻射聲壓對比結果Fig. 16 The radiated sound pressure of field point No.2
由圖12 和圖13 可知,本文通過劃分子集的方式選取測點,使得測點能夠覆蓋曲面且分布相對均勻。通過設定目標函數MAC 值,可保證能夠選取到模態向量空間夾角小的測點組合,對應的模態振型更易辨識。最后通過圖14~圖16 中的振動聲輻射預報結果對比曲線可知,當其他因素(如分析頻段、測點數目、模態截斷數目等)相同時,相比均勻測點布置方法,均勻子集隨機選取測點方法能夠更準確地進行振動聲輻射預報,且能與參考結果吻合較好。
3 結 語
通過上述分析,可得到以下結論:
1)均勻子集隨機選取測點方法測點覆蓋曲面、分布均勻,并且測點選取不存在主觀性和盲目性。
2)本文以測點組模態矩陣的MAC 值作為目標函數,可保證測點組的模態向量間的空間夾角較小,其模態振型相應較易識別。
3)通過數值分析,當分析頻段、測點數目、模態截斷數目等相同時,該方法對結構振動聲輻射預報結果的精度比均勻布置方法更高。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
哲學評論(2021年2期)2021-08-22 01:53:34
天天愛科學(2020年6期)2020-09-10 07:22:44
中華詩詞(2019年7期)2019-11-25 01:43:04
數學物理學報(2017年6期)2018-01-22 02:26:40
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
現代企業(2015年9期)2015-02-28 18:56:50
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:44