基于拓展電壓矢量集合的永磁同步電機(jī)無差拍控制
2021-04-06 12:04:06李耀華周逸凡趙承輝秦玉貴
微特電機(jī) 2021年3期
關(guān)鍵詞:模型
李耀華,周逸凡,趙承輝,秦玉貴
(長安大學(xué) 汽車學(xué)院,西安 710064)
0 引 言
永磁同步電機(jī)直接轉(zhuǎn)矩控制根據(jù)滯環(huán)比較器得到轉(zhuǎn)矩與磁鏈增減信號,通過查表方式確定輸出唯一電壓矢量,控制簡單,響應(yīng)速度快[1-3]。但受開關(guān)表電壓矢量數(shù)量限制,且每個(gè)采樣周期只作用一個(gè)基本電壓矢量,直接轉(zhuǎn)矩控制的轉(zhuǎn)矩與磁鏈脈動(dòng)較大。為了減小脈動(dòng),國內(nèi)外學(xué)者通過改進(jìn)開關(guān)表[4]、調(diào)節(jié)占空比[5]、空間矢量調(diào)制技術(shù)[6]等對直接轉(zhuǎn)矩控制進(jìn)行優(yōu)化。
基于系統(tǒng)離散模型的無差拍(以下簡稱DB)控制令下一時(shí)刻的轉(zhuǎn)矩與磁鏈的預(yù)測值與參考值相等,理論上可以使系統(tǒng)在一個(gè)控制周期內(nèi)的轉(zhuǎn)矩誤差與磁鏈誤差為零[7]。傳統(tǒng)DB控制實(shí)時(shí)求解較為復(fù)雜的一元二次方程,并需要對方程的根進(jìn)行判斷,計(jì)算量較大。在磁鏈與轉(zhuǎn)矩變化較大時(shí),求解出的電壓矢量超出逆變器的輸出電壓限制,無法通過空間矢量調(diào)制輸出,需要進(jìn)一步設(shè)計(jì)電壓矢量選擇策略,增加了系統(tǒng)的復(fù)雜程度[8-9]。文獻(xiàn)[10-12]通過模型預(yù)測控制,輸出與DB控制理想電壓矢量最接近的基本電壓矢量,并將實(shí)際參與成本函數(shù)計(jì)算的基本電壓矢量進(jìn)行精簡,計(jì)算量減少,但其性能受到基本電壓矢量個(gè)數(shù)限制。文獻(xiàn)[13]提出一種無需模型預(yù)測控制,僅通過理想電壓矢量幅值判斷確定施加電壓矢量的方法,簡化了選擇方法,但仍僅輸出基本電壓矢量。文獻(xiàn)[14-15]通過改變占空比,將備選電壓矢量數(shù)目進(jìn)行拓展,以減少理想電壓矢量與實(shí)際施加電壓矢量之間的誤差,但仍涉及成本函數(shù)的計(jì)算,計(jì)算量較大。
為了降低直接轉(zhuǎn)矩控制的轉(zhuǎn)矩脈動(dòng),本文提出了永磁同步電機(jī)磁鏈與轉(zhuǎn)矩DB控制,建立了磁鏈與轉(zhuǎn)矩的變化量簡化計(jì)算模型,并驗(yàn)證了簡化模型的可行性,從而推導(dǎo)出實(shí)現(xiàn)磁鏈和轉(zhuǎn)矩DB控制的理想輸出電壓矢量計(jì)算方程。為了簡化DB控制下理想電壓矢量的實(shí)現(xiàn),提出通過理想電壓矢量角度和幅值簡化選擇7個(gè)基本電壓矢量的方法(DB-MPC-7),無需成本函數(shù)計(jì)算。為了減小理想電壓矢量與實(shí)際輸出電壓矢量之間的誤差,進(jìn)一步改善控制效果,提出一種從角度和幅值對備選電壓矢量進(jìn)行拓展的方法(DB-MPC-36r),將備選電壓矢量角度拓展至36個(gè),輸出電壓矢量幅值可為線性調(diào)制范圍內(nèi)任意值。該方法通過查表方式即可實(shí)現(xiàn),無需空間矢量調(diào)制計(jì)算,簡單易行。仿真驗(yàn)證了永磁同步電機(jī)磁鏈和轉(zhuǎn)矩DB控制的可行性。相較于DB-MPC-7,DB-MPC-36r可顯著減小轉(zhuǎn)矩脈動(dòng),降低電流諧波含量,但平均開關(guān)頻率有所增大。
1 永磁同步電機(jī)磁鏈與轉(zhuǎn)矩變化量簡化計(jì)算模型
忽略定子電阻壓降,由電壓矢量Vs引起的PMSM定子磁鏈運(yùn)動(dòng)如圖1所示。
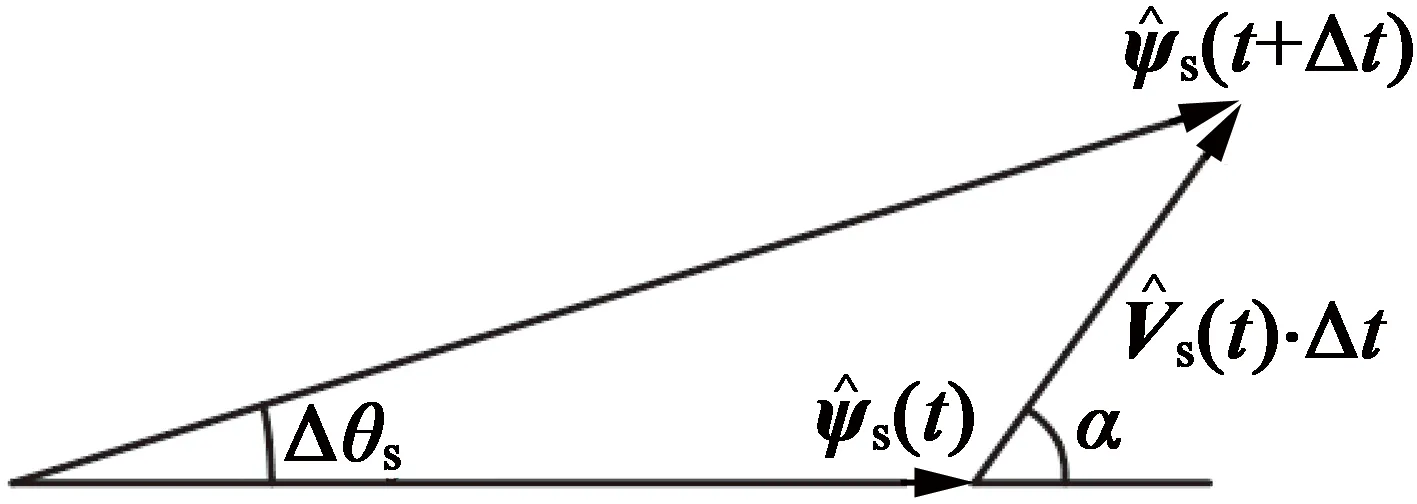
圖1 定子磁鏈運(yùn)動(dòng)
由圖1可知,第(t+Δt)時(shí)刻的定子磁鏈幅值如下式:
(1)

在采樣周期很小的情況下,轉(zhuǎn)子磁鏈運(yùn)動(dòng)較小,其對轉(zhuǎn)矩角的影響可以忽略不計(jì)。由圖1可知,施加電壓矢量引起的轉(zhuǎn)矩角變化如下式:
(2)
由式(2)可知,第(t+Δt)時(shí)刻的轉(zhuǎn)矩角如下式:
(3)
永磁同步電機(jī)轉(zhuǎn)矩方程:
(4)
式中:p,ψf,Ld和Lq分別為電機(jī)極對數(shù),永磁體磁鏈,d軸和q軸電感。當(dāng)k=0時(shí),Ld=Lq,式(4)即為表面式永磁同步電機(jī)轉(zhuǎn)矩方程。
由式(1)~式(4)可得下一時(shí)刻的永磁同步電機(jī)轉(zhuǎn)矩方程:

k(t+Δt)sinδ(t+Δt)cosδ(t+Δt)]
(5)
由k的定義可知,下一時(shí)刻k值如下:
(6)
將式(1)、式(3)和式(6)代入至式(5),可得下一時(shí)刻的永磁同步電機(jī)轉(zhuǎn)矩表達(dá)式:
(1+q2+2qcosα)k(t)sin[δ(t)+
(7)
根據(jù)式(1)和式(7),電壓矢量作用一個(gè)采樣周期后磁鏈和轉(zhuǎn)矩變化量如下式:

(8)
ΔTe=Te(t+Δt)-Te(t)=

(1+q2+2qcosα)·k(t)·sin[δ(t)+

sinδ(t)+k(t)·sinδ(t)cosδ(t)}
(9)
為了減少DB控制的計(jì)算量,對式(1)和式(7)進(jìn)行簡化,可得永磁同步電機(jī)下一時(shí)刻磁鏈與轉(zhuǎn)矩簡化計(jì)算模型[16-17]:
(10)

ksinδ(t)cosδ(t)+qsin[α+δ(t)]-
k·qsin[α+2δ(t)]}
(11)
由式(10)~式(11)可得,施加電壓矢量引起的定子磁鏈幅值和轉(zhuǎn)矩變化量簡化計(jì)算模型:
(12)
ΔTe_sim=Te(t+Δt)sim-Te(t)=
(13)
為了驗(yàn)證定子磁鏈幅值和轉(zhuǎn)矩變化量簡化計(jì)算模型的有效性,定義施加電壓矢量引起的定子磁鏈幅值和轉(zhuǎn)矩變化量簡化模型與常規(guī)模型的相對誤差率絕對值:
(14)
(15)
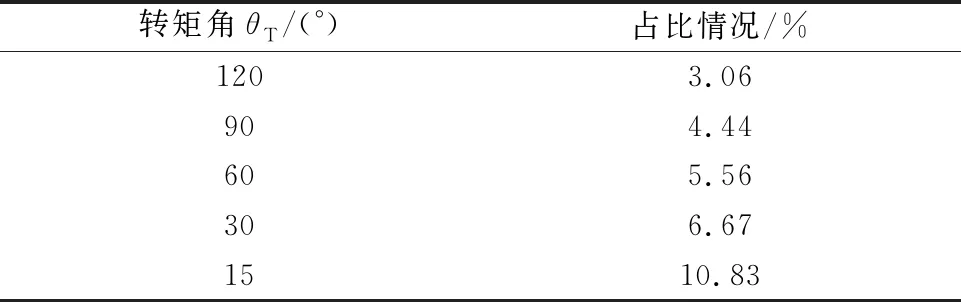
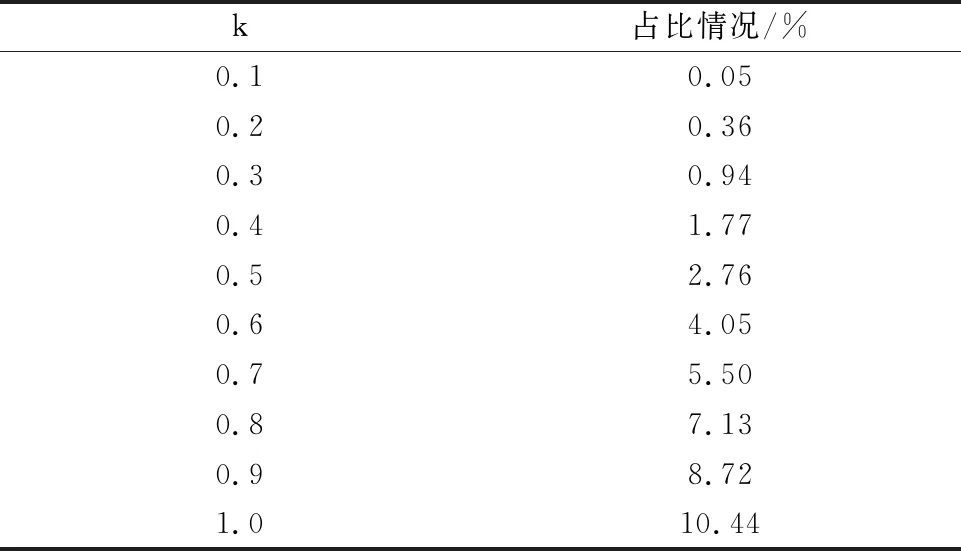
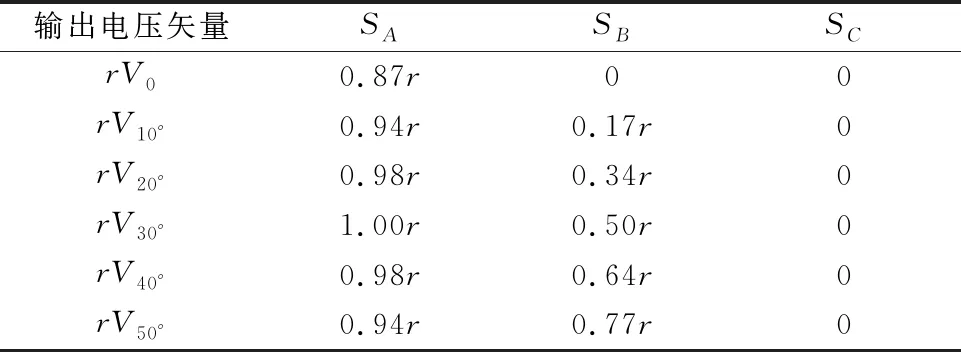
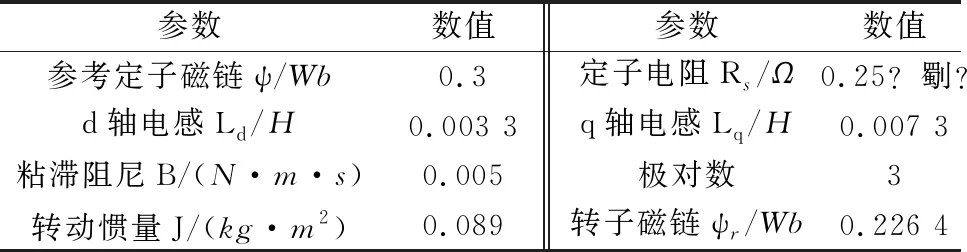
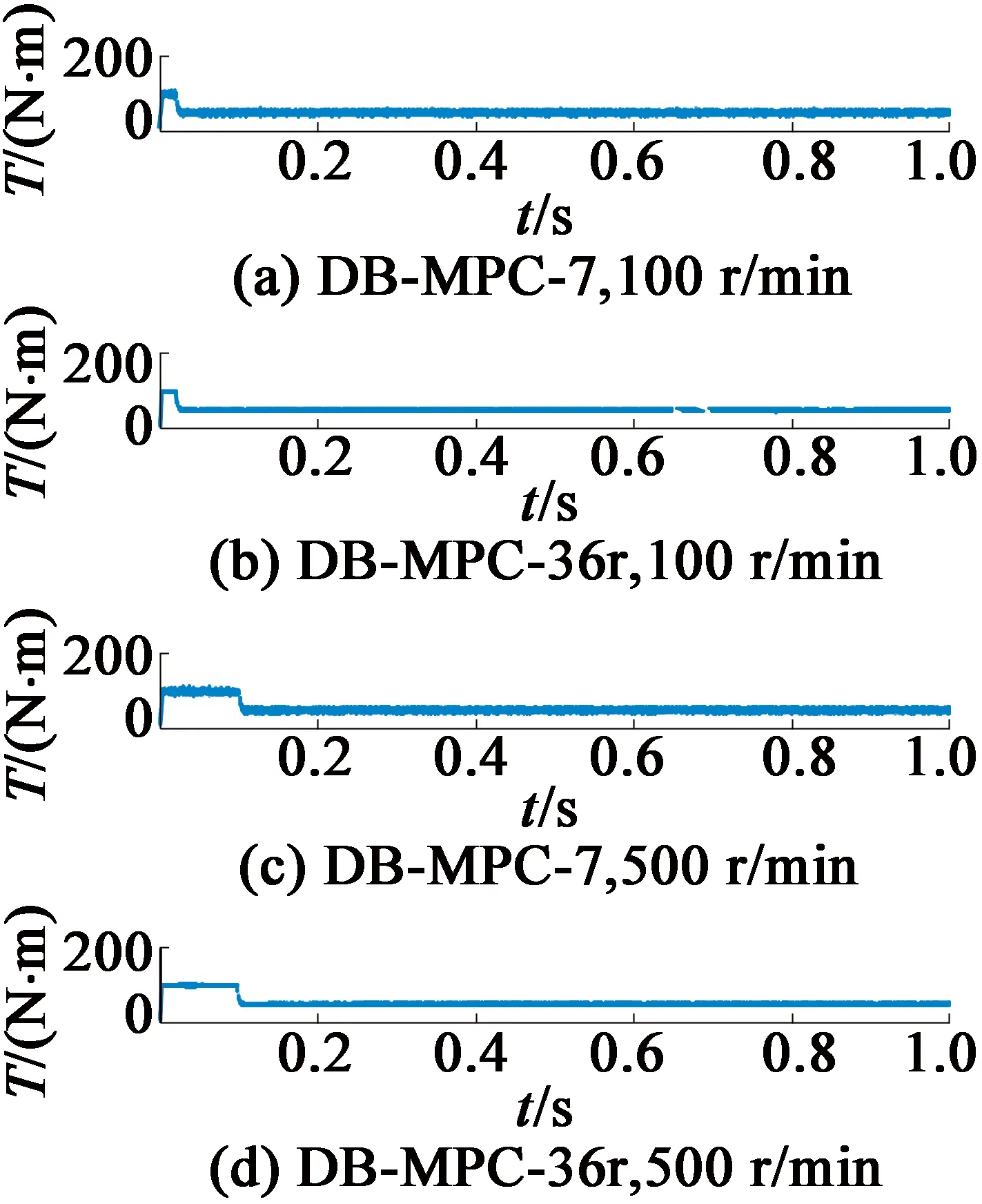
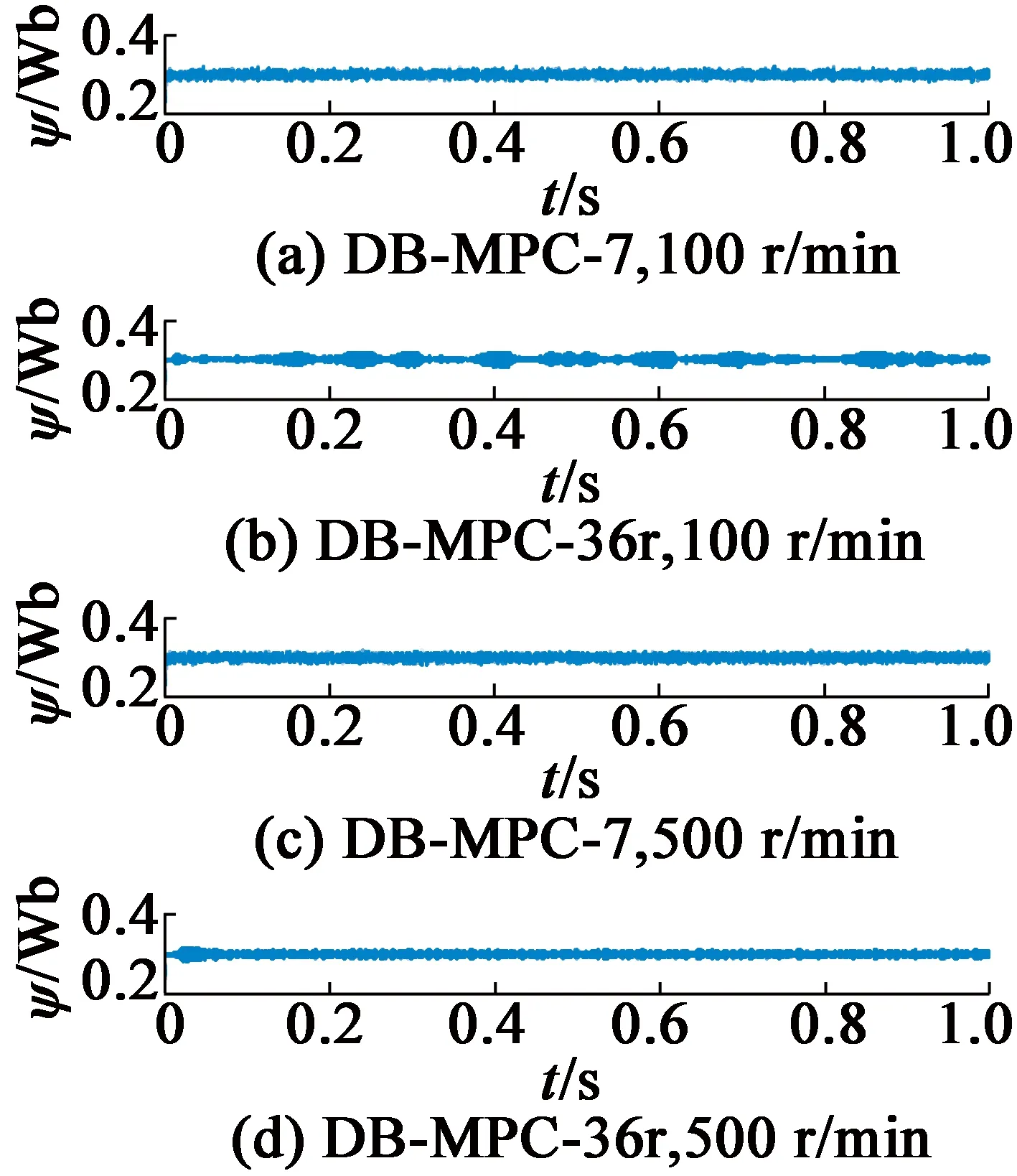
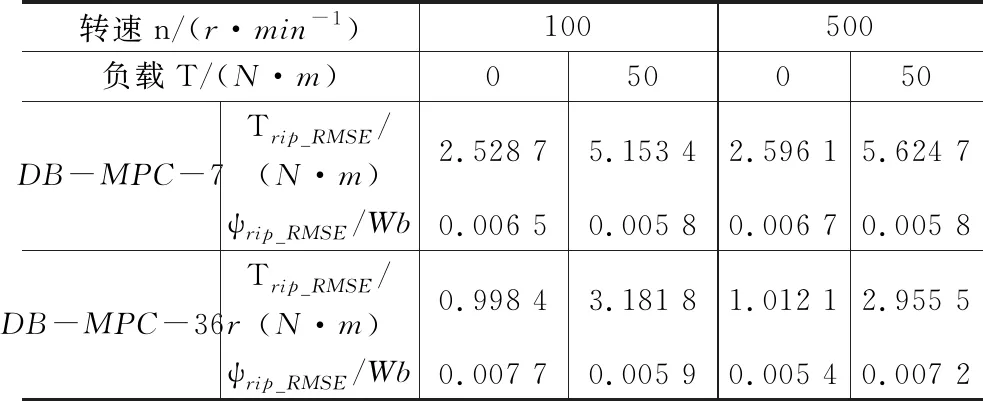
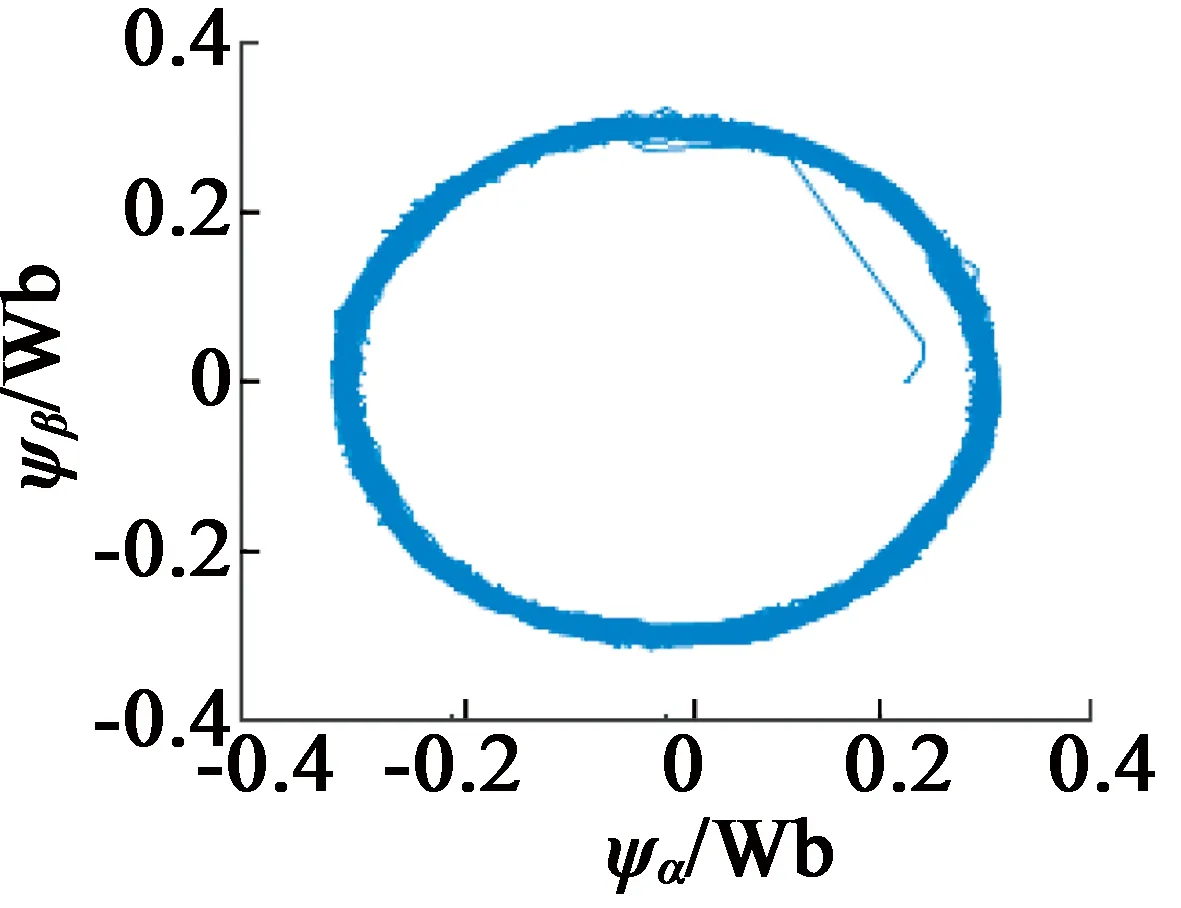
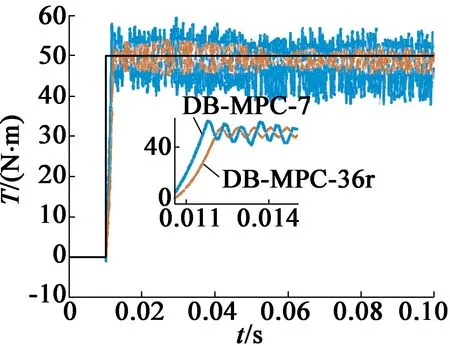
當(dāng)0 圖2 磁鏈變化量簡化計(jì)算模型與常規(guī)模型的相對誤差 經(jīng)統(tǒng)計(jì),僅當(dāng)α接近90°和270°時(shí),即分母過零點(diǎn)區(qū)域,誤差率較高,約占總數(shù)據(jù)的6%,其余94%區(qū)域的誤差率數(shù)據(jù)絕對值小于5%。統(tǒng)計(jì)結(jié)果表明:采用簡化模型代替常規(guī)模型來預(yù)測磁鏈變化量基本可行,即式(16)成立。 (16) 當(dāng)k=1,q=0.01,0<α≤360°,0<δ≤120°,轉(zhuǎn)矩變化量簡化計(jì)算模型與常規(guī)模型的相對誤差率如圖3所示。 圖3 轉(zhuǎn)矩變化量簡化計(jì)算模型與常規(guī)模型的相對誤差 經(jīng)統(tǒng)計(jì),僅在分母過零點(diǎn)區(qū)域,轉(zhuǎn)矩變化量誤差率較高。統(tǒng)計(jì)表明,簡化模型與常規(guī)模型誤差率絕對值小于5%的情況,占總數(shù)據(jù)約90%。 不同轉(zhuǎn)矩角下,轉(zhuǎn)矩變化量誤差率絕對值大于5%的數(shù)據(jù)占比情況,如表1所示。由表1可知,轉(zhuǎn)矩角較小時(shí),轉(zhuǎn)矩變化量誤差率大的數(shù)據(jù)較多。 表1 不同轉(zhuǎn)矩角下,轉(zhuǎn)矩變化誤差率絕對值大于5%數(shù)據(jù)占比 當(dāng)q=0.01,0<α≤360°,0<δ≤120°,不同k值下,轉(zhuǎn)矩變化量誤差率絕對值大于5%的數(shù)據(jù)占比情況如表2所示。表2表明,僅當(dāng)k值較大時(shí),轉(zhuǎn)矩變化量誤差率大的數(shù)據(jù)較多。 表2 不同k值下,轉(zhuǎn)矩變化誤差率絕對值大于5%數(shù)據(jù)占比 當(dāng)k=1,0<α≤360°,0<δ<δmax,不同q值下,轉(zhuǎn)矩變化量誤差率絕對值大于5%的數(shù)據(jù)占比情況如表3所示。表3表明,僅當(dāng)q值較大時(shí),轉(zhuǎn)矩變化量誤差率大的數(shù)據(jù)較多。 表3 不同q值下,轉(zhuǎn)矩變化誤差率絕對值大于5%數(shù)據(jù)占比 由表1~表3可知:僅當(dāng)k較大、q較大及轉(zhuǎn)矩角較小時(shí),轉(zhuǎn)矩變化量誤差率大的數(shù)據(jù)較多,且僅限于分母過零點(diǎn)附近區(qū)域。因此,采用簡化模型代替常規(guī)模型來預(yù)測轉(zhuǎn)矩變化量基本可行,即式(17)成立: ΔTe_sim≈ΔTe (17) 根據(jù)磁鏈與轉(zhuǎn)矩?zé)o差拍控制思想,第(t+Δt)時(shí)刻永磁同步電機(jī)的磁鏈與轉(zhuǎn)矩值應(yīng)等于第(t+Δt)時(shí)刻的參考值,即: (18) (19) 由于采樣頻率較高,第(t+Δt)時(shí)刻的磁鏈和轉(zhuǎn)矩參考值可近似等于第t時(shí)刻的參考值: (20) (21) 由式(18)~式(21)可知,滿足DB控制的理想磁鏈與轉(zhuǎn)矩變化量如下式: (22) (23) 由式(12)~式(14)、式(16)~式(17)可知,施加電壓矢量一個(gè)采樣周期后,磁鏈與轉(zhuǎn)矩的變化量如下式: (24) k(t)sin[α+2δ(t)]}= k(t)sin[α+2δ(t)]} (25) 由式(24)可得: (26) 將式(26)代入式(25),變換可得: (27) 在磁鏈與轉(zhuǎn)矩DB控制下,實(shí)際磁鏈與轉(zhuǎn)矩的變化量與滿足無差拍控制的理想磁鏈與轉(zhuǎn)矩變化量相同,即式(28)~式(29)成立: (28) (29) 將式(22)和式(23)代入至式(27),則可求得令磁鏈與轉(zhuǎn)矩在第(t+Δt)時(shí)刻滿足DB控制的理想電壓矢量角度αDB: (30) (31) 通過式(30)和式(31)求解得出第(t+Δt)時(shí)刻應(yīng)施加的理想電壓矢量的幅值和角度后,采用簡化電壓矢量選擇方法,從基本電壓矢量集合中選擇最優(yōu)電壓矢量作為輸出。基本電壓矢量集合如下式: Vs∈{V0,V1,V2,V3,V4,V5,V6} (32) 式中:Vs為備選電壓矢量,V0-V6為逆變器產(chǎn)生的7個(gè)基本電壓矢量。當(dāng)輸出零電壓矢量時(shí),可以由上一時(shí)刻的開關(guān)狀態(tài)選擇開關(guān)次數(shù)較少的V0開關(guān)狀態(tài)[18-20]。 傳統(tǒng)模型預(yù)測控制需要遍歷7個(gè)電壓矢量[21],計(jì)算量較大。為了減少計(jì)算量,可根據(jù)靜止坐標(biāo)系下理想電壓矢量角度,減少備選電壓矢量,如式(33)所示。 (33) 將備選電壓矢量集合縮小后,可無需成本函數(shù)計(jì)算,直接通過判斷理想電壓矢量幅值大小,確定是否選擇非零電壓矢量或零電壓矢量。以備選電壓矢量為V0和V1為例,如式(34)所示,若理想電壓矢量幅值大于基本電壓矢量幅值的一半,即Udc/3,則選擇非零電壓矢量;反之,選擇零電壓矢量。 (34) 將上文所述的簡化電壓矢量選擇磁鏈和轉(zhuǎn)矩?zé)o差拍控制系統(tǒng),記為DB-MPC-7。DB-MPC-7的系統(tǒng)控制框圖如圖4所示。 圖4 DB-MPC-7系統(tǒng)控制框圖 由上文可知,DB-MPC-7選用7個(gè)基本電壓矢量中的一個(gè)近似替代理想電壓矢量,角度和幅值都受到較大限制,理想電壓矢量與施加的電壓矢量之間存在較大的誤差,影響系統(tǒng)性能。因此,本文對備選電壓矢量進(jìn)行拓展,增大備選電壓矢量數(shù)量,減小理想電壓矢量與施加電壓矢量間誤差。 圖5 [0°,60°]區(qū)間備選電壓矢量 (35) 根據(jù)理想電壓矢量的角度和幅值,DB控制最終輸出電壓矢量由式(36)確定: (36) 由于輸出電壓矢量的角度確定已知,在確定輸出電壓矢量后,可采用查表方式直接得到電壓矢量相應(yīng)占空比。以[0, 50°]區(qū)間為例,DB-MPC-36r控制下電壓矢量對應(yīng)的三相開關(guān)占空比如表4所示。 表4 DB-MPC-36r電壓矢量三相開關(guān)占空比 圖6 DB-MPC-36r系統(tǒng)控制框圖 基于MATLAB/Simulink平臺(tái),搭建了永磁同步電機(jī)拓展電壓矢量DB控制系統(tǒng)仿真模型,對DB-MPC-7和DB-MPC-36r進(jìn)行對比驗(yàn)證。系統(tǒng)采樣周期為1×10-4s。仿真用永磁同步電機(jī)參數(shù)如表5所示。 表5 仿真用永磁同步電機(jī)參數(shù) 為評價(jià)DB-MPC-7和DB-MPC-36r的穩(wěn)態(tài)特性,設(shè)定參考轉(zhuǎn)速為100r/min和500r/min,DB-MPC-7和DB-MPC-36r控制下的永磁同步電機(jī)系統(tǒng)分別在空載和負(fù)載條件(50N·m)由靜止起動(dòng)。永磁同步電機(jī)轉(zhuǎn)矩和定子磁鏈幅值如圖7~圖10所示。 圖7 不同轉(zhuǎn)速下空載轉(zhuǎn)矩 圖8 不同轉(zhuǎn)速,50 N·m 圖9 不同轉(zhuǎn)速下空載穩(wěn)態(tài)磁鏈 圖10 不同轉(zhuǎn)速,50 N.m負(fù)載下穩(wěn)態(tài)磁鏈 仿真結(jié)果驗(yàn)證了永磁同步電機(jī)磁鏈和轉(zhuǎn)矩DB控制的可行性,采用DB-MPC-7和DB-MPC-36r均可實(shí)現(xiàn)永磁同步電機(jī)靜態(tài)起動(dòng)。 定義穩(wěn)態(tài)下(0.1s~1s)轉(zhuǎn)矩脈動(dòng)均方根誤差、磁鏈脈動(dòng)均方根誤差如式(37)~式(38)所示,其中n為采樣總個(gè)數(shù)。 (37) (38) DB-MPC-7和DB-MPC-36r在不同負(fù)載和不同轉(zhuǎn)速下的系統(tǒng)穩(wěn)態(tài)轉(zhuǎn)矩脈動(dòng)以及穩(wěn)態(tài)轉(zhuǎn)矩磁鏈脈動(dòng)如表6所示。 表6 不同控制策略下的穩(wěn)態(tài)控制性能 由表6可知,相較于DB-MPC-7,在低速空載時(shí),DB-MPC-36r降低轉(zhuǎn)矩脈動(dòng)60.5%,磁鏈脈動(dòng)略有上升;低速加載時(shí),DB-MPC-36r降低轉(zhuǎn)矩脈動(dòng)38.2%,磁鏈脈動(dòng)基本相同。在高速空載時(shí),DB-MPC-36r降低轉(zhuǎn)矩脈動(dòng)61.0%,磁鏈脈動(dòng)也略有下降;高速加載時(shí),DB-MPC-36r降低轉(zhuǎn)矩脈動(dòng)47.4%,磁鏈脈動(dòng)略有上升。仿真結(jié)果表明DB-MPC-36r可較大幅度降低轉(zhuǎn)矩脈動(dòng)。 空載下,DB-MPC-7和DB-MPC-36r的定子磁鏈軌跡如圖11所示。 (d) DB-MPC-36r,500 r/min 由圖11可知,DB-MPC-7和DB-MPC-36r的磁鏈軌跡都接近圓形。相較于DB-MPC-7,DB-MPC-36r的磁鏈軌跡更加平滑。 (a) DB-MPC-7,100 r/min (b) DB-MPC-7,500 r/min (c) DB-MPC-36r,100 r/min 轉(zhuǎn)速為500r/min且負(fù)載為50N·m下,DB-MPC-7和DB-MPC-36r穩(wěn)態(tài)a相電流和電流總諧波含量(THD)如圖12~圖13所示。 (a) DB-MPC-7 (b) DB-MPC-36r (a) DB-MPC-7 (b) DB-MPC-36r 由圖12~圖13可知,相較于DB-MPC-7,DB-MPC-36r控制下的電流波形更加平滑,總諧波含量明顯下降。 轉(zhuǎn)速開環(huán)下,參考轉(zhuǎn)矩在0.01s時(shí)由零階躍至 50N·m,DB-MPC-7和DB-MPC-36r控制下轉(zhuǎn)矩動(dòng)態(tài)特性如圖14所示。 圖14 不同控制策略下轉(zhuǎn)矩階躍動(dòng)態(tài)響應(yīng) 由圖14可知,DB-MPC-7動(dòng)態(tài)響應(yīng)速度略快于DB-MPC-36r。穩(wěn)態(tài)下,DB-MPC-7轉(zhuǎn)矩脈動(dòng)明顯大于DB-MPC-36r。 定義系統(tǒng)平均開關(guān)頻率fave如下: (39) 式中:Nswitching為逆變器開關(guān)總次數(shù);t為仿真總時(shí)長。 不同轉(zhuǎn)速下,DB-MPC-7和DB-MPC-36r控制下的平均開關(guān)頻率如圖15所示。 圖15 不同轉(zhuǎn)速下DB-MPC-7和DB-MPC-36r的平均開關(guān)頻率 由仿真結(jié)果可知,不同轉(zhuǎn)速下DB-MPC-36r的平均開關(guān)頻率均高于DB-MPC-7。這是因?yàn)橐粋€(gè)采樣周期內(nèi)DB-MPC-7只作用一個(gè)基本電壓矢量,且相鄰采樣周期作用的基本電壓矢量可以相同,而DB-MPC-36r一個(gè)采樣周期內(nèi)作用2或3個(gè)基本電壓矢量,且相鄰采樣周期施加的電壓矢量基本不同。 本文對永磁同步電動(dòng)機(jī)磁鏈與轉(zhuǎn)矩變化量計(jì)算模型進(jìn)行了簡化,驗(yàn)證了簡化模型的可行性。推導(dǎo)出滿足磁鏈與轉(zhuǎn)矩DB控制的理想電壓矢量,提出簡化選擇7個(gè)基本電壓矢量的方法(DB-MPC-7)及從角度和幅值對備選電壓矢量進(jìn)行拓展的方法(DB-MPC-36r)。前者使用逆變器生成的7個(gè)基本電壓矢量,后者將備選電壓矢量角度擴(kuò)展至36個(gè)且幅值在線性調(diào)制范圍內(nèi)任意可調(diào)。通過仿真對比,得出結(jié)論如下: 1) 永磁同步電動(dòng)機(jī)磁鏈與轉(zhuǎn)矩DB控制可行,電機(jī)系統(tǒng)運(yùn)行良好。 2)DB-MPC-7通過理想電壓矢量角度和幅值確定施加的電壓矢量,無需成本函數(shù)計(jì)算,省去傳統(tǒng)模型預(yù)測控制計(jì)算。 3)DB-MPC-36r根據(jù)理想電壓矢量角度和幅值通過查表方式生成角度更加豐富且幅值連續(xù)可變的電壓矢量,從而減小施加電壓矢量與理想電壓矢量的誤差,且無需空間矢量調(diào)制,簡單易行。 4) 相較于DB-MPC-7,DB-MPC-36r可顯著減小轉(zhuǎn)矩脈動(dòng)和電流諧波含量,動(dòng)態(tài)響應(yīng)基本相當(dāng),但平均開關(guān)頻率有所增大。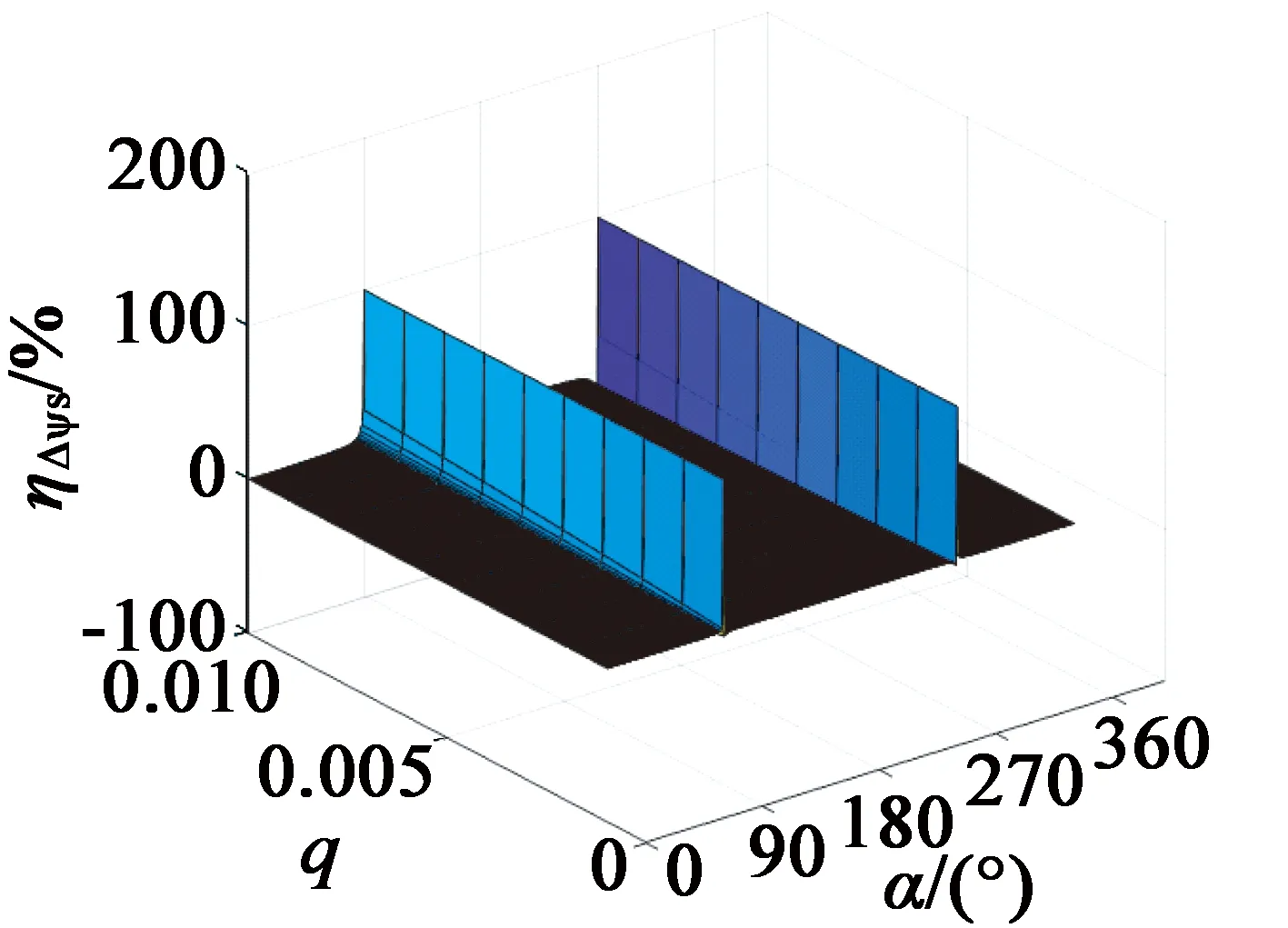


2 永磁同步電機(jī)磁鏈與轉(zhuǎn)矩DB控制


3 基于拓展電壓矢量集合的磁鏈和轉(zhuǎn)矩DB控制






4 仿真對比
4.1 穩(wěn)態(tài)特性









4.2 動(dòng)態(tài)特性
4.3 平均開關(guān)頻率

5 結(jié) 語
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19