有限元算法驗證機器人電動關節用螺釘強度
2021-04-06 12:04:08董華興蔡松濤孫海峰
微特電機 2021年3期
董華興,蔡松濤,孫海峰
(中國電子科技集團公司第二十一研究所,上海 200233)
0 引 言
機器人中的關節通常采用模塊化研制方法,即將高轉速大力矩中空電機、高減速比減速器、高精度編碼器、大功率電機驅動器進行高度集成化,即關節一體化模組。關節模組作為機械臂中獨立傳動單元及核心組成部分,它整體上決定了機械臂的負載能力、運動速度和精度、機械臂尺寸大小乃至整個機器人的研發周期[1]。而關節螺釘作為連接關節的核心,其強度性能將直接影響電動關節、乃至整個機器人的可靠性和安全性。
分析螺釘強度的常用方法是在設計之初進行強度核算,本文將對某型SCARA型機器人在設計中進行螺釘強度分析計算。SCARA機器人的大臂電動關節的結構和受力情況相對于整機其他電動關節來說,其電機出力大,承載力大,結構強度要求高,因此大臂關節的螺釘相對其他電動關節的螺釘強度要求更高。
SCARA機器人電動關節采用諧波減速器,而安裝螺孔的位置和其中螺釘規格及數量均已定型。這就要求我們在設計的過程中,需要根據機器人的速度、負載的質量等因素,來檢驗設計中采用的該材質的螺釘能否滿足要求。尤其是諧波減速器輸出法蘭用螺釘,除了承受預緊力外,還要受到附加軸向力、輸出轉矩、傾覆力矩的作用[2],一旦選用的螺釘強度不夠,發生塑性變形或斷裂,如圖1所示,將造成機器人精度降低,甚至發生事故。
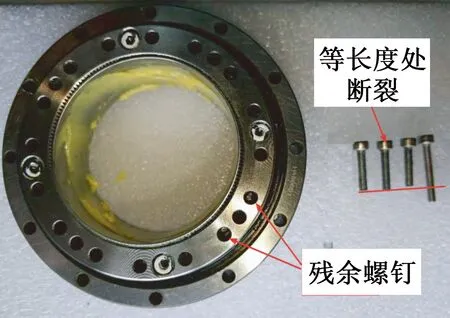
圖1 螺釘斷裂
1 ANSYS螺釘強度分析的條件
用有限元軟件ANSYS對電動關節進行理論模態分析[3],主要的參考條件有材料參數、安裝情況(受力情況)、負載參數等,查驗該型機器人采用的電動關節的設計圖紙,并按照圖紙制定電動關節構型的方案,建立電動關節的實體三維模型;再將模型中各部件的材質,材料參數設置完畢;模型按照效率和精度的要求劃分好網絡,使之離散化,獲得有限元模型;需驗證的大臂電動關節按照安裝條件設置好受力參數,并設置好邊界條件,選取合適的最優化算法進行解算;最后,提取螺釘處的應力數據和對應模態,和螺釘的額定數據進行比對,來驗證該型電動關節螺釘的有效性。具體的分析步驟如圖2所示。
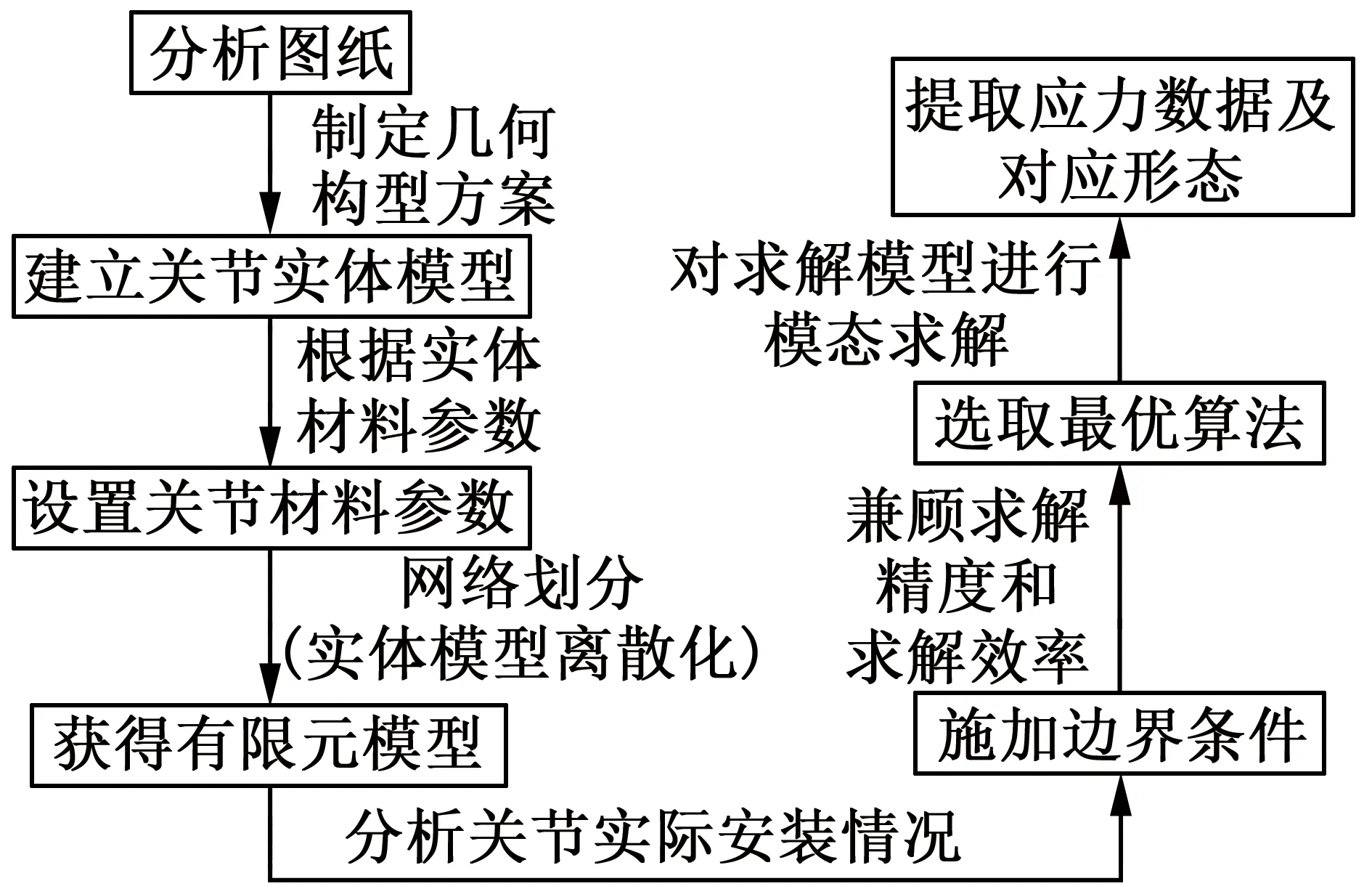
圖2 強度分析流程示意圖
2 解算過程
將電動關節的三維模型文件轉入ANSYS中建立好關節實體模型,按照材料參數、受力情況等將參數代入模型。
(1) 材料參數
大臂材料為鋁合金板7075,定義彈性模量為7.1×104MPa,泊松比為0.3,密度為2.81×10-9t/mm3;
選取的M3螺釘材料為40Cr,定義彈性模量為2.11×105MPa,泊松比為0.277,密度為7.87×10-9t/mm3;
諧波減速器的柔輪材料為不銹鋼,彈性模量為2.1×105MPa,泊松比為0.3,密度為7.85×10-9t/mm3。
(2) 受力情況分析
①扭矩:大臂與剛輪配合螺紋孔處,承受諧波減速器輸出扭矩27 N·m,如圖3所示。
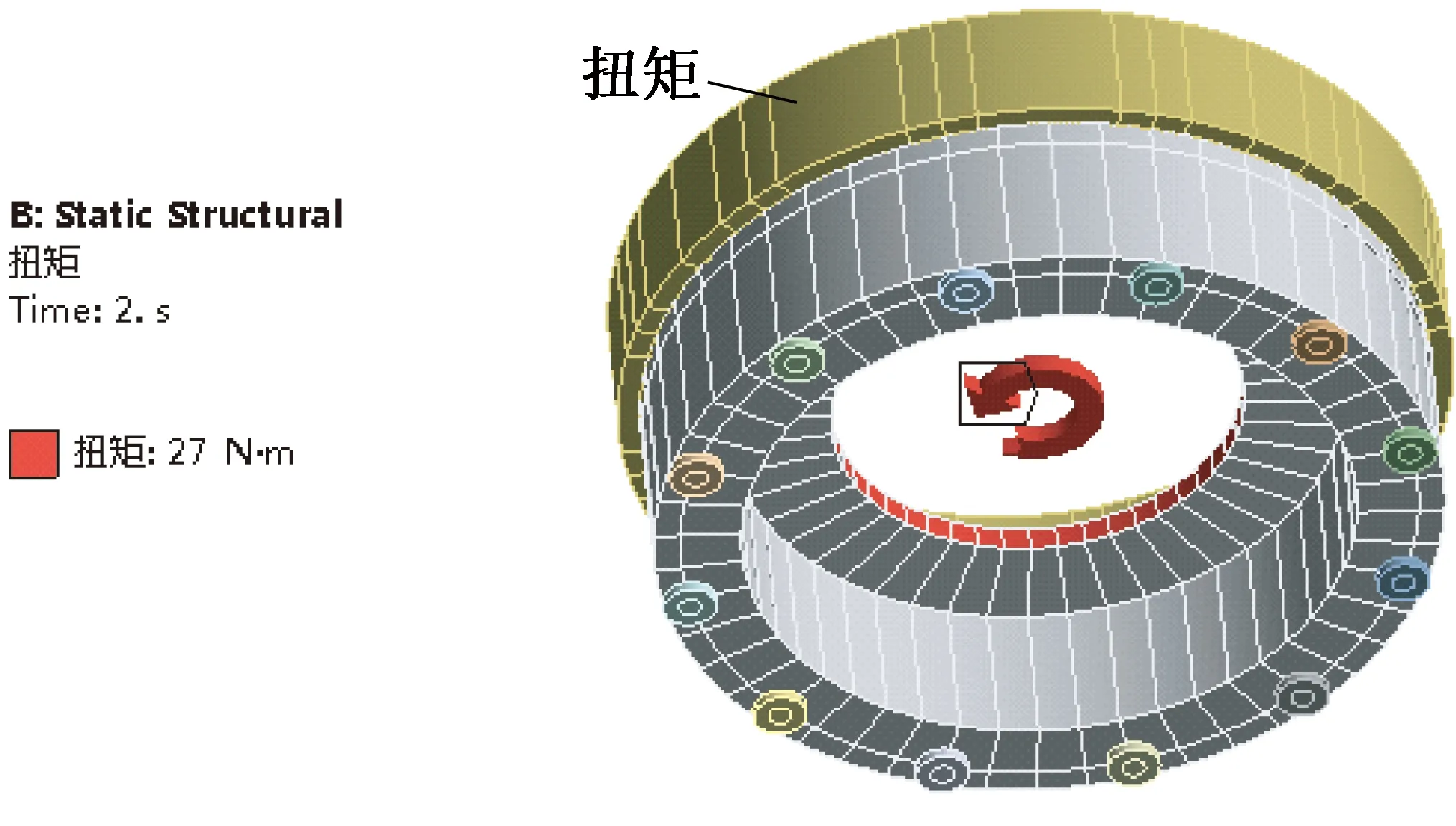
圖3 輸出扭矩
②負載:大臂和小臂折彎部件自重產生的壓力作用,同樣采用等效力和等效力矩進行近似替代,如圖4、圖5所示。
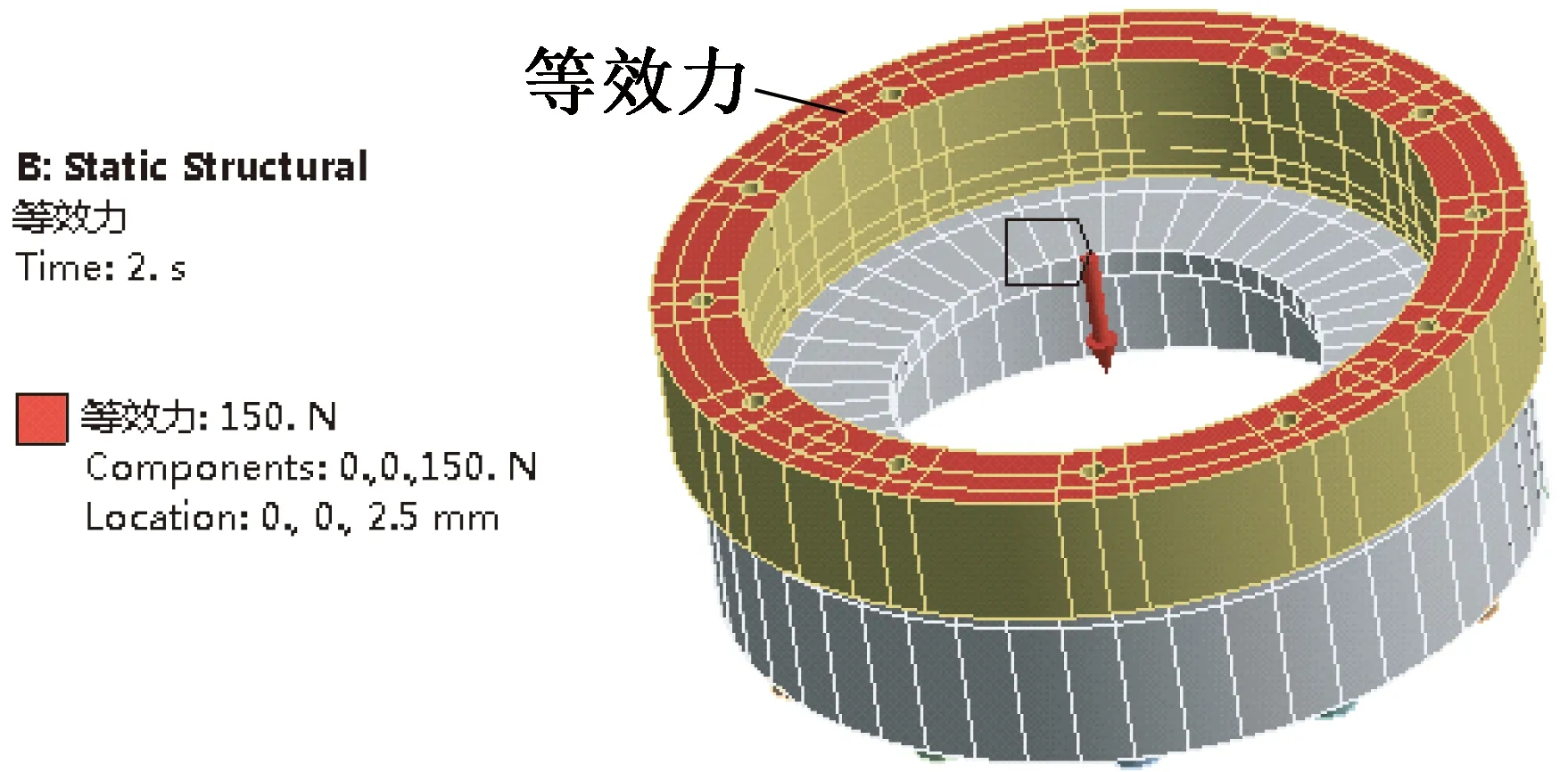
圖4 等效力

圖5 等效力矩
③重力加速度為9.806 m/s2。
(3) 邊界條件
實際工作中,諧波減速器的柔輪與剛輪通過十字交叉軸承進行連接,即設置柔輪與剛輪配合面的圓柱支撐。根據實際約束條件,設置支撐的軸向和徑向固定,而切向自由,如圖6所示。
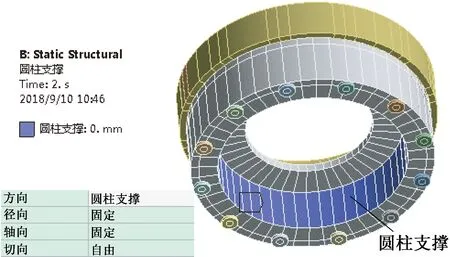
圖6 圓柱支撐邊界條件設定
在本文中,為兼顧分析結果的精確性和計算所需時間的經濟性,對大臂進行適當處理,僅選取大臂螺紋局部區域參與計算分析,大臂剩余部分對螺紋局部區域有約束作用。通過設置大臂螺紋局部區域與整體模型間配合面的圓柱約束,對切線方向進行約束,如圖7所示。

圖7 圓柱約束邊界條件設定
(4) 設置螺紋接觸
采用M3螺釘進行連接,為螺紋設置詳細參數,例如螺紋起止點、中徑、螺距等參數,如表1所示。

表1 螺紋參數設置
(5) 求解及結果后處理
將表1中的參數均代入軟件,根據精度和效率的最優組合進行求解,并提取螺釘等效應力和變形結果,得到基于有限元算法的螺釘連接強度的最大峰值為74.346 MPa。
螺釘變形情況如圖8所示,螺釘上半部分受到扭矩作用,發生較大變形,最大變形為0.001 5 mm,位于螺釘頂端。而下半部分與大臂螺紋連接,變形較小。

圖8 螺釘變形云圖(放大2.3×103倍)
螺釘等效應力分布情況如圖9所示,最大為74.346 MPa,出現在螺釘10與大臂螺紋連接處(注,等效力矩對螺釘4作用為拉應力,而對于螺釘10為壓應力)。
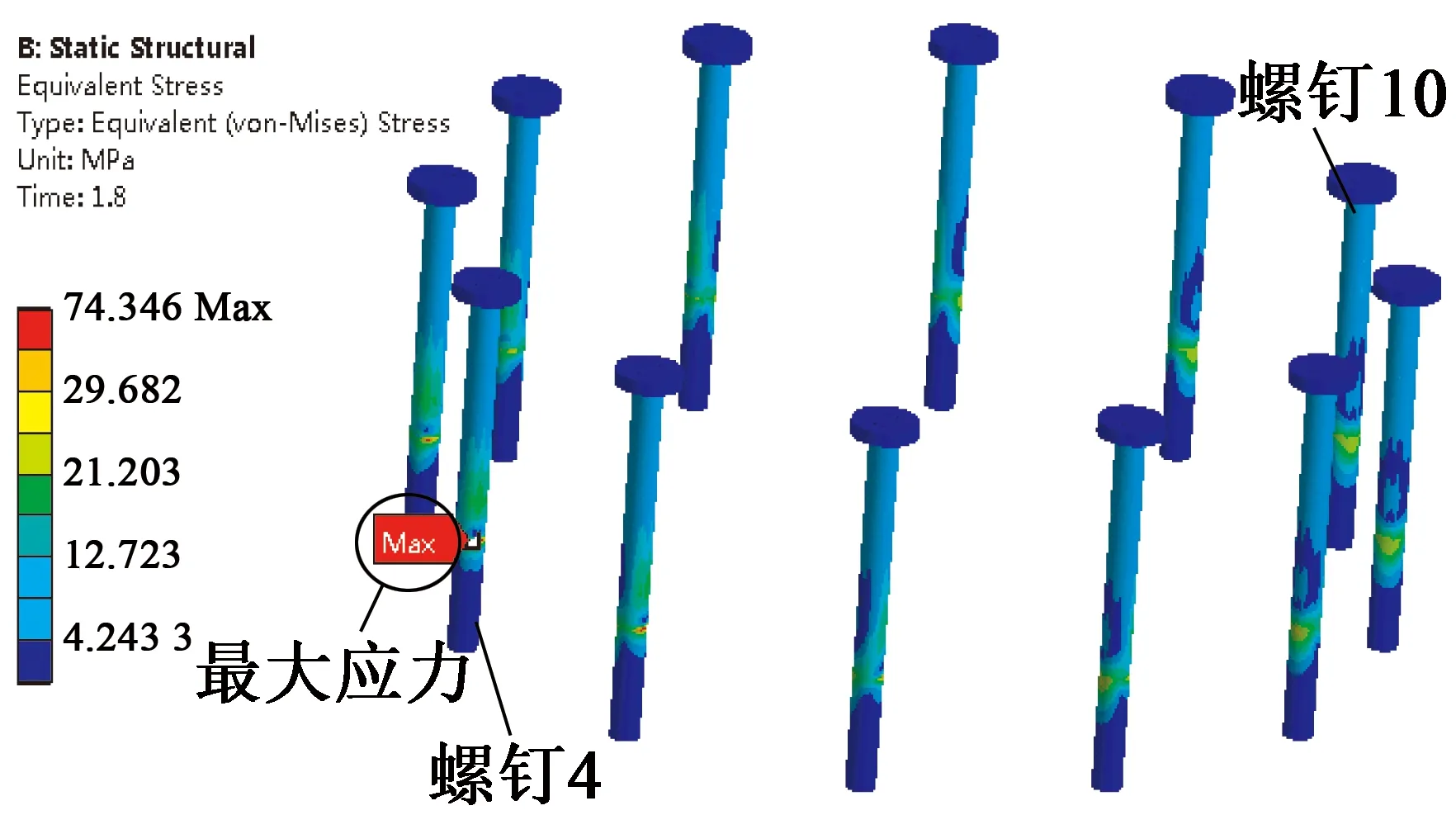
圖10 螺釘等效應力分布云圖
3 螺釘許用應力
本文選用的M3型螺釘材質為不銹鋼,沒有采用合金鋼,根據螺釘的材料參數和生產商數據,采用螺釘許用應力計算公式[4]:
式中:ε為尺寸系數;Kt為螺紋工藝系數;Ku為各圈螺紋牙受力分配不均系數;Kσ為螺紋應力集中系數;Sa為安全系數;σ為此材料的強度極限。
得出該型號M3螺釘的許用應力為75.5 MPa。基于理論螺釘連接強度計算出的螺釘許用應力幅度,大于基于有限元螺釘連接強度計算出的74.346 MPa,該型M3螺釘可以滿足設計要求。
4 結 語
上述螺釘強度分析的結果說明,在SCARA機器人承載力要求最高,結構強度要求最高的大臂電動關節中采用不銹鋼M3螺釘,也可以滿足設計要求,而不需要采用成本更高的合金鋼材料螺釘,在最大受力情況下,螺釘雖然有少許形變,但不會斷裂,以免造成精度降低或發生事故。