質心調節式巡線機器人機械本體的結構設計
2021-04-04 06:49:18盧坤媛王吉岱
制造業自動化 2021年3期
盧坤媛 ,王吉岱
(1.青島黃海學院,青島 266590;2.山東科技大學,青島 266590)
0 引言
隨著國家電網的高速發展,輸電線路的安全穩定運行越來越受到人們的重視。為了代替人工、直升機巡檢等傳統的巡檢方式,減輕人工勞動強度和作業成本,國內外多家研究機構展開了對研究輸電巡線機器人技術的研究,并取得了一定的成就。目前,塔內作業的巡檢技術比較成熟,但越塔作業的巡線機器人還沒有很成熟的技術。巡線機器人沿著電力線路巡檢時,完成塔內和塔間的工作,在塔內作業時,沿著直線行走,遇到簡單障礙(防震錘、間隔棒、懸垂線夾等)時,可以比較容易越障。但是遇到耐張線塔,需要跨越引流線時,越障難度就比較大。巡線機器人的工作環境如圖1所示。
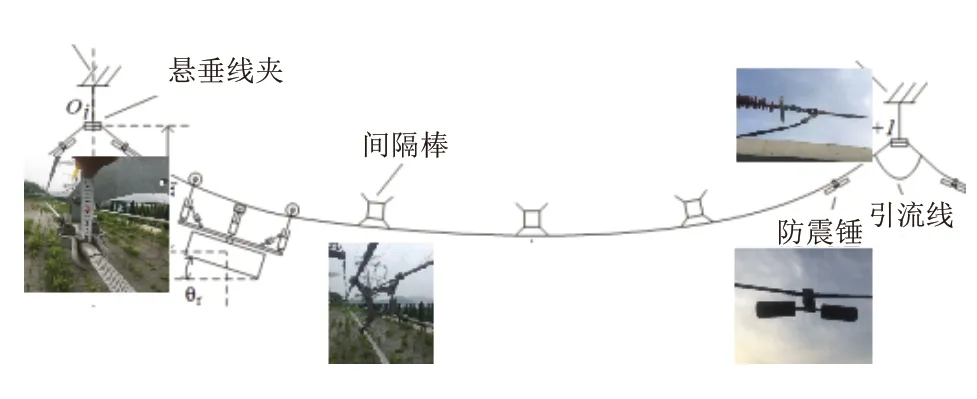
圖1 高壓線路巡線機器人工作線路圖
1 巡線機器人的系統組成
作為機電一體化產品,巡線機器人涉及到機械機構、傳感器融合技術、驅動系統、通訊技術以及電源技術等多個領域。巡線機器人一般由機械本體、檢測系統、控制系統、反饋系統以及驅動系統等組成的。巡線機器人控制系統包括手動控制裝置、遙控器控制裝置以及遠程監控裝置。檢測裝置可以實時檢測巡線機器人的行走狀態以及線路故障狀態,并將檢測信號反饋給控制系統,通過閉環控制,將反饋的信息比較之后,對執行機構發出新的指令,進行位姿調整。
巡線機器人的機械本體技術是目前制約巡線機器人發展的關鍵技術之一。在設計機械本體時,首先要研究清楚高壓輸電線路巡線機器人的工作要求以及要達到的技術指標,其主要內容有:在人工輔助下可以實現上、下線;在驅動系統的作用下,沿線穩定行走;遇到障礙,檢測系統發出信號,反饋系統將信號反饋到巡線機器人的上位機,從而控制驅動裝置驅動行走輪平穩越障;電力線路是有一定弧度的,因此巡線機器人要有一定的爬坡能力;越障功能:可以跨越電力線路上的間隔棒、防震錘、懸垂線夾和跳線等障礙;依據巡線機器人要實現的功能目標和性能要求,其機械本體設計包括:越障手臂設計行走臂設計和整體框架設計等。
2 可調質心巡線機器人的機構簡圖
一般的機械手臂,具有六個自由度,針對本文的技術要求,可以適當的減少自由度的個數,執行末端既可以達到指定的位姿,又減少了控制的難度。利用人沿線攀援的仿生學原理,本文設計了三臂巡線機器人,左右兩側的手臂均有三個自由度:豎直面的伸縮移動、水平面的轉動、豎直面的轉動。這三個自由度就可以滿足行走輪的位姿即末端執行器的需求。對于中間機械手臂無需實現水平面的跨越,因此可以減少一個豎直面的仰俯的自由度。三臂巡線機器人的機構簡圖,如圖2所示。
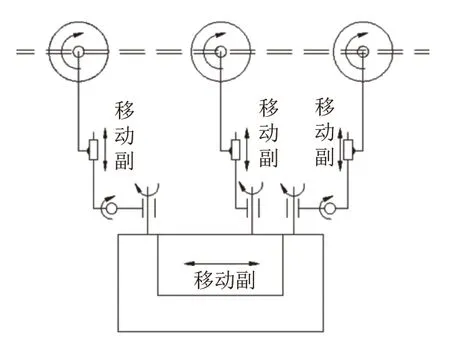
圖2 質心可調的巡線機器人的機構簡圖
巡線機器人沿線向右行走時,當右側的機械臂遇到障礙時,右臂依靠伸長抬起離線,此時只有兩個機械臂掛線,整體的機械重心就會偏斜,影響越障的平穩性,故在三個機械手臂的底部基架上安裝質心調節機構。越障時,抬起一個手臂時,借助控制箱和機座的相對移動,調整整個巡線機器人的重心在兩個掛線的機械臂中間。
在線越障時,考慮到實際線路障礙尺寸的大小以及分布的情況,機械臂伸縮等諸多因素,確定巡線機器人的左右兩臂之間的距離為280mm,三個行走輪的直徑為100mm,轉動關節1、2的轉動角度為60°,關節3的伸縮距離為240mm。依左臂為例,可以實現沿線跨度為700mm的距離,如圖3所示。
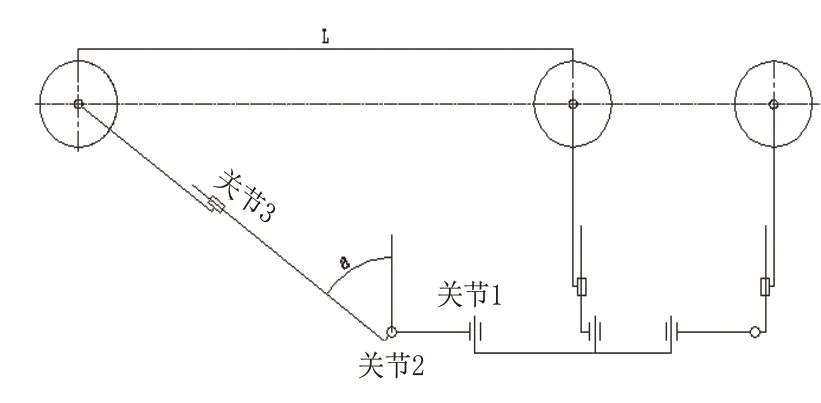
圖3 機械臂跨越示意圖
3 巡線機器人整體結構設計
巡線機器人沿線巡檢線路時,它的所有重量都作用在高壓線路上,為了避免因重量問題對線路造成損壞,在設計巡線機器人時,盡可能設計質量輕便、易于操作的機構。結合實際的工況要求,左右兩臂要反向對稱布置在輸電線路上,機構相同,都有行走機構、伸縮機構、組合擺臂機構、剎車機構等。通過絲杠螺母副,來控制控制箱和基座之間的移動,進而調節整機的機構重心。
3.1 伸縮機構的設計
伸縮機構由導向桿、梯形絲杠、絲母、絲母座、伸縮臂護板、底板以及驅動電機等組成。伸縮臂機構和行走機構之間通過絲座連接固定,傳動機構采用螺旋機構平穩傳動,由電機驅動螺紋絲杠,帶動絲母沿導桿上下移動,進而實現行走主機構的升起和降落運動。
3.2 行走機構的設計
行走機構由行走輪和伸縮臂組成,行走輪由電機通過兩個錐齒輪機構帶動,它是行走機構的主要零件之一。它需要沿線行走,還需要承受整個機器人的重量,所以在設計行走輪時,既要考慮重量問題,還要考慮摩擦力的問題。行走輪自身既要輕便,又要滿足足夠的強度和剛度。作者選用尼龍70作為行走輪的主體,在其外表面采用高強度、高彈性的聚氨酯耐磨材料。聚氨酯材料具有高彈性和高耐磨性,可以防止爬坡時機器人打滑,同時又減輕了對線路的磨損。
3.3 組合擺臂機構的設計
組合擺臂機構由兩個轉動副組成,每個轉動副是一個蝸輪蝸桿傳動,其轉角在±60°的范圍內轉動,蝸輪蝸桿傳動由電機驅動,實現組合擺臂在豎直方向或者在水平方向內的轉動。在控制系統的作用下,組合擺臂和伸縮臂配合實現在線的行走以及簡單的越障功能。因為蝸輪蝸桿機構具有良好的自鎖性能,所以組合擺臂在線運行的任何位姿都可以保持比較穩定的狀態。
3.4 質心可調機構的設計
質心可調機構是利用絲杠螺母移動副,實現箱體和機械手臂之間的移動,從而調節整個機器的機構重心。絲杠采用梯形螺紋絲杠,傳遞動力大、自鎖性好。電機帶動梯形螺紋絲杠,絲杠帶螺母沿著機箱的燕尾槽往復的水平移動。
3.5 制動機構的設計
在線檢測時,遇到故障,巡線機器人需要制動剎車,本文設計的制動剎車機構由剎車片、減速器、杠桿等組成,減速器采用蝸輪蝸桿傳動,自鎖性和精密性較好。利用該制動剎車機構,巡線機器人可以在線上平穩停車。
4 巡線機器人驅動系統的選取
依據驅動源的不同,巡線機器人的驅動系統包含液壓驅動、氣壓驅動、電機驅動以及混合驅動等。
1)液壓驅動系統以高壓油為工作介質,結構緊湊,動作靈敏且傳動平穩,這是液壓驅動的優點。其缺點是:密封要求的條件高,液壓的元件成本高,而且需要配備專門的儲油缸、液壓閥,體積比較大。在巡線機器人的驅動系統中不適合采用這種驅動方式。
2)氣動以壓縮空氣作為動力,氣動裝置結構簡單,安裝維護簡單,易于操作。但是因為是壓縮空氣,其可靠性不高,工作運行的穩定性稍差,不能進行高精度的控制。所以這種驅動方式也不適合。
3)電機驅動沒有污染,易于控制,運動精度較高,因此在機械驅動中被廣泛應用。驅動電機有步進電機和伺服電機,而伺服電機又分為直流和交流。步進電機價錢便宜,控制系統簡單,但是它是開環控制,精度比較低。交流伺服電機在成本和維護上比直流電機有優勢,但是對于高輸電線路上的巡線機器人如何取電成了難題。在啟動性能上,調速范圍上,直流伺服電機比其他幾種電機都有明顯的優點但是價錢較高。因此,本文在選擇電機時,選用直流電機附加編碼器的方式,既經濟又實用,能夠較好的驅動巡線機器人,實現在線作業。
5 巡線機器人的三維實體建模及優化
巡線機器人的機械本體結構比較復雜,借助于計算機輔助設計模塊方便對巡線機構進行優化。在三維建模的過程中,涉及到了實體建模、特征建模和裝配建模三個模塊,借助于這三大模塊的強大的產品設計功能,為后期的機構運動分析和動力分析奠定了基礎。對巡線機器人的組成進行分解,左右兩臂機構對稱,裝配時一定要注意對稱性,依據各個零部件的位置和建模關系,對各個零部件進行機構分析。
在UG中虛擬裝配分為自底向上的方式和自頂向下的方式,以及混合組裝。對于本文設計的三個機械手臂采用了自底向上的裝配方式,而裝配行走機構和伸縮機構則用了自頂向下的裝配方式。在建模和裝配的過程中,出現了干涉情況,重新繪制二維圖紙,建立三維模型,直到沒有干涉發生為止,最終得到巡線機器人的總裝配體圖,如圖4所示。
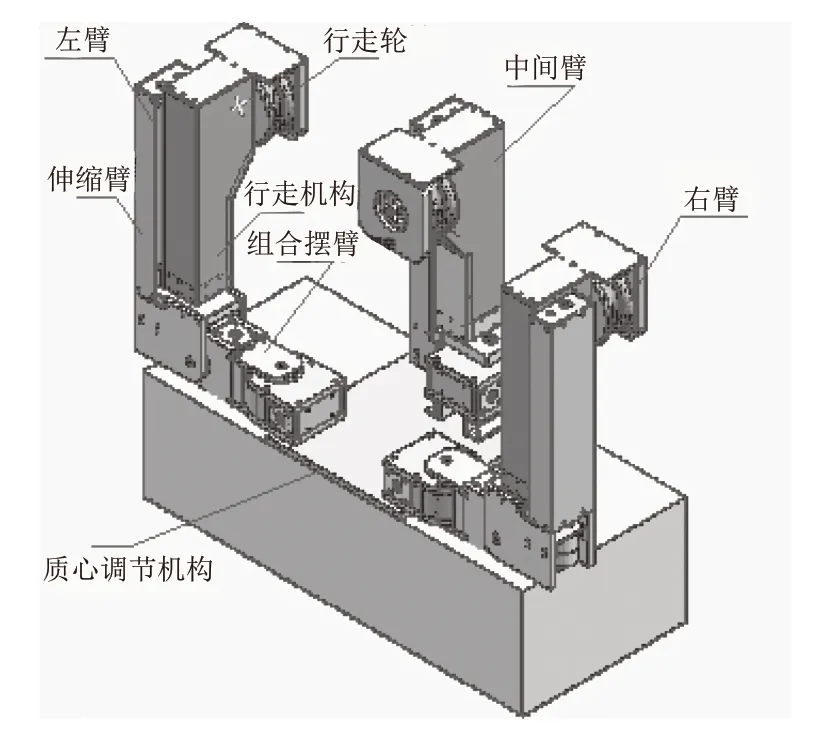
圖4 巡線機器人的三維優化模型
6 結語
本文設計了一種質心可調節的巡線機器人機械本體的結構。該巡線機械人包括機械組成部分和動力控制部分,機械組成部分又分為行走機構和質心調節機構。按照要到達的技術要求,利用CAD設計二維圖紙,然后在UG軟件中建立零部件的三維模型,在裝配過程中對發生干涉的零部件重新設計,反復優化,最終建立了巡線機器人的整體裝配模型。
猜你喜歡
電腦報(2020年35期)2020-09-17 13:25:53
現代裝飾(2020年7期)2020-07-27 01:27:42
當代工人(2020年8期)2020-05-25 09:07:38
流行色(2020年1期)2020-04-28 11:16:38
電腦報(2019年40期)2019-09-10 07:22:44
藝術啟蒙(2018年7期)2018-08-23 09:14:18
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
科技知識動漫(2016年8期)2016-07-29 20:40:09
