多功能護理床翻折機構設計與運動優(yōu)化
2021-04-04 06:49:04趙海鳴舒輝波萬奇龍
制造業(yè)自動化 2021年3期
趙海鳴 ,舒輝波 ,萬奇龍 ,李 杰
(1.中南大學 機電工程學院,長沙 410083;2.中南大學 高性能復雜制造國家重點實驗室,長沙 410083)
0 引言
隨著人民生活水平的不斷提高,人口壽命正不斷延長,老齡化已成為全球范圍的社會問題[1,2]。老年人由于身體機能的衰退,肌體活性不斷減退;相較于普通人,老年人的臥床時間更長,由于行動不便,經常會長時間保持同一位姿,使得身體局部組織長期受壓,導致壓瘡發(fā)生[3];同時,由于肢體長期得不到運動,不僅會造成關節(jié)萎縮,甚至會引發(fā)其他疾病[4]。
護理床是一種常用的智能護理設備[5,6],能夠輔助病人進行康復運動,促進血液循環(huán),增強肌體活性。翻折機構作為護理床的重要部件之一,在病人的康復護理中發(fā)揮著重要作用,能夠提供病人生活自理所需的各種位姿;通過位姿的調整,可避免身體局部組織長期受壓,防止壓瘡的產生[7]。
姜生元等研制了一種多功能康復床,該床具有抬背、輪椅轉換、輔助排便等功能[8];張建國[9]等基于人體工學原理設計了護理床的上升機構和抬腿機構,并對其進行了運動分析;秦帥華[10]等設計了一種八桿單自由度起背機構,建立了相應的運動學模型,通過MATLAB對機構進行了優(yōu)化設計;趙禮剛等[11]對抬背機構設計變量進行了研究,分析了各變量對背板角加速度的影響程度,并對關鍵變量進行了優(yōu)化。
以上研究雖然實現了護理床的功能多樣化,但未能完全解決臥床病人的護理難題,實用性還有待提高;對機構運動學的研究主要集中于抬背機構,未能對康復護理的關鍵機構進行分析。
本文基于人體工程學原理,設計了三類翻折機構,提升了多功能護理床的實用性和安全性;在此基礎上,以改善護理床位姿變換過程中的平穩(wěn)舒適性為目標,對機構進行優(yōu)化設計。
1 翻折機構的結構建模
文中的翻折機構包括抬背機構、翻身機構、曲腿機構三大類,具有平躺、抬背、翻身、抬腿、曲腿、等功能,能夠滿足病人康復護理對位姿的要求。各機構的尺寸和安裝位置是依照國標[12,13]進行設計的,能夠更好的貼合人體尺寸。
1.1 抬背機構的結構模型
抬背機構能夠實現仰臥、坐起等功能,主要由電動推桿、抬背桿、滾輪、抬背架、固定桿組成;抬背架包含center架、left架、right架三大部分,各部件間通過鉸鏈相連。該機構具有一個自由度,動力源為電動推桿,能夠保證確定的運動;工作時,電動推桿驅動抬背桿轉動,通過滾輪與抬背架的高副接觸帶動抬背架繞固定桿轉動,實現0°~75°的角度調節(jié),機構模型如圖1所示。
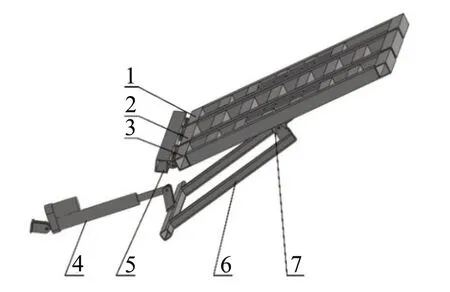
圖1 抬背機構模型
1.2 翻身機構的結構模型
翻身機構能夠實現臥床病人的左右側翻,可避免身體局部長期受壓,對壓瘡預防有較好效果。該機構由電動推桿、翻身鉸座、支撐板、翻身架組成,翻身架包含center架、left架、right架三大部分,center架通過焊接在其上的支撐板與left架、right架間形成可分離式接觸。當電動推桿伸長時,center架將帶動left架順時針轉動,實現左翻身;當電動推桿收縮時,center架將帶動right架逆時針轉動,實現右翻身,翻身角度為0°~30°,機構模型如圖2所示。
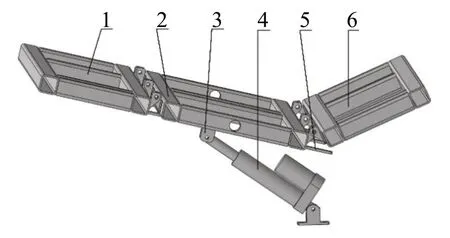
圖2 翻身機構模型
1.3 曲腿機構的結構模型
曲腿機構由電動推桿、曲腿鉸座、活動架、大腿架、小腿架組成,該機構具有一個自由度和一個動力源,能保證確定的運動。電動推桿通過曲腿鉸座帶動活動架繞固定鉸座轉動,活動架向上轉動可實現抬腿功能,向下轉動可實現曲腿和輪椅轉換功能,能夠輔助病人進行康復運動;活動架、大腿架與小腿架通過鉸鏈相連接,形成一個平行四邊形機構,可保證翻轉過程中小腿架始終水平。機構抬腿角度為0°~35°,結構模型如圖3所示。

圖3 曲腿機構模型
2 翻折機構運動學模型的建立
保證護理床位姿變換過程中的平穩(wěn)能提升臥床病人的舒適性體驗,抬背架、翻身架、大腿架是與病人身體直接接觸的執(zhí)行構件,其運動性能的優(yōu)劣將直接影響病人的體驗,需要對其運動參數進行研究。
2.1 抬背機構的運動學模型
抬背機構的運動簡圖如圖4所示,研究的主要參數為抬背架角位移θ6,角速度ω6,角加速度α6。
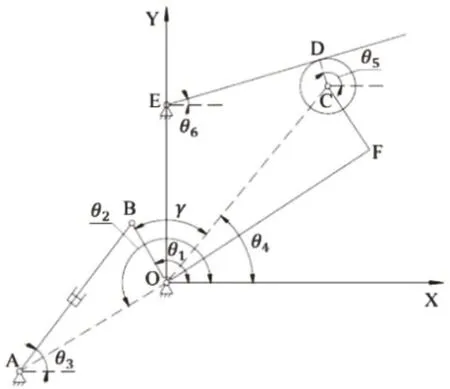
圖4 抬背機構運動簡圖
?AOB的封閉矢量方程為:

其復數矢量形式為:

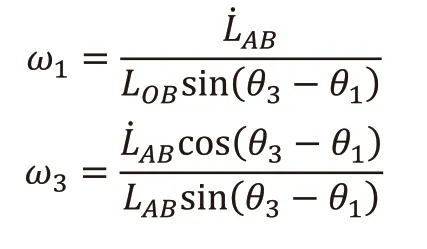
運用歐拉公式eiθ=cosθ+isinθ將式(1)的實部和虛部分離,解得:

將式(1)關于時間t求導,解得:
將式(1)關于時間t求二階導,解得:

LOC與LOB均為抬背桿的組成單元,由幾何關系可知:

對四邊形OCDE進行分析,其封閉矢量方程為:

由機構的運動幾何關系可知:θ5=θ6+90°,則式(2)的復數矢量表達式為:

式(3)經歐拉公式展開求解可得:

式中M=-LOCcosθ4,N=LOCsinθ4-LOE,P=LCD。

將式(3)關于時間t求導,解得:
將式(3)關于時間t求二階導,解得:

2.2 翻身機構的運動學模型
翻身機構的運動簡圖如圖5所示,研究的主要參數為翻身架角位移θ3,角速度ω3,角加速度α3。

圖5 翻身機構運動簡圖
同理,求解得:

LOC與LOB均為翻身架的組成單元,由幾何關系可知:

2.3 曲腿機構的運動學模型
曲腿機構驅動原理與翻身機構類似,其運動簡圖如圖6所示,研究的主要參數為活動架角位移θ3,角速度ω3,角加速度α3。

圖6 曲腿機構運動簡圖
同理,求解得:
LOC與LOB均為活動架的組成單元,由幾何關系可知:

3 翻折機構的運動優(yōu)化
為了滿足護理床的舒適性要求,翻折機構各執(zhí)行構件的運動參數應變化平穩(wěn),避免發(fā)生突變;優(yōu)化設計的目的:通過調整機構的結構尺寸,降低執(zhí)行構件的角加速度,使其運動更加平穩(wěn)。
3.1 抬背機構的運動優(yōu)化
參考護理床設計標準,綜合考慮護理床的空間布局、抬背架翻轉角度以及推桿的行程,初步確定各點坐標為:O(0,0),A(-405,-100),B(-15,65),C(450,195),E(0,220),F(465,145)。
以各坐標點為設計點,通過ADAMS軟件建立抬背機構模型并設定好零件間的連接關系;對抬背機構進行運動仿真,得到角加速度隨轉角變化的曲線,如圖7所示。

圖7 抬背架角加速度曲線
由圖7可知,抬背架角加速度隨轉角增大而持續(xù)增大,整個曲線較陡峭,終點位置的角加速度相較于起始位置增大了近17倍,機構的運動平穩(wěn)性較差。
根據護理床的空間布局以及高度方向的尺寸限制,可以確定O點、E點橫縱坐標以及A點、C點縱坐標,為了提升抬背機構的運動性能,可對其他設計點坐標進行優(yōu)化。
以Ax、Bx、By、Cx為設計變量(下標x代表橫坐標,y代表縱坐標),其取值范圍如表1所示。對設計變量進行靈敏度分析,得到各變量對抬背架角加速度的影響度曲線如圖8所示。從圖可知,變量Cx對抬背架最大角加速度影響非常顯著,當Cx增大時,最大角加速度先減小后增大,Bx、By對最大角加速度影響較大,Ax對最大角加速度影響微弱。

表1 設計變量的取值范圍/mm
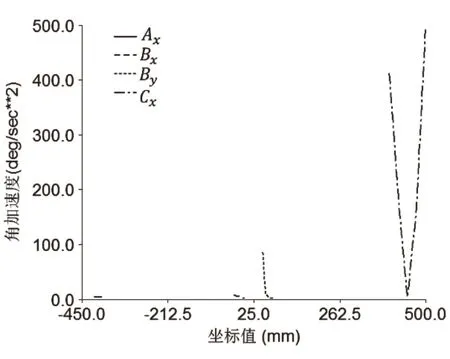
圖8 抬背架角加速度影響度曲線
為了提升優(yōu)化的效率,根據靈敏度分析的結果,選取Bx、By、Cx為優(yōu)化變量,變量矩陣X=[X1,X2,X3]=[Bx,By,Cx]
抬背機構各構件長度為:

推桿伸縮長度應在行程以內,抬背架的轉角為0°~75°,由式(4)可知:

式中M=-LOCcosθ4,N=LOCsinθ4-LOE,P=LCD。
以抬背架最大角加速度為目標函數,由式(5)可知:
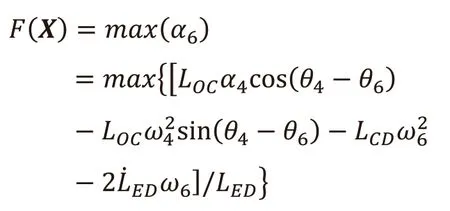
優(yōu)化后變量的取值如表2所示,由表可知,當Bx、By、Cx分別為-4mm、73mm、450mm時,抬背架最大角加速度最小。優(yōu)化前后抬背架角加速度曲線對比圖如圖9所示,由圖可知,優(yōu)化后抬背架角加速度曲線更加平緩,最大角加速度減小了近3倍,機構的運動平穩(wěn)性得到了提升。

表2 優(yōu)化后變量的取值/mm
3.2 翻身機構的運動優(yōu)化
初步確定翻身機構各點坐標為:O(0,0),A(185,-220),B(-22,-60),C(-22,0),根據護理床的空間布局以及高度方向的尺寸約束,可以確定O點的橫縱坐標以及A點的縱坐標。選取Ax、Bx、By為設計變量(下標x代表橫坐標,y代表縱坐標),變量的取值范圍如表3所示。
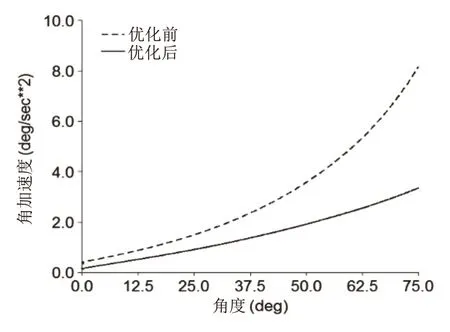
圖9 優(yōu)化前后抬背架角加速度曲線

表3 設計變量的取值范圍/mm
以Ax、Bx、By為優(yōu)化變量,變量矩陣X=[X1,X2,X3]=[Ax,Bx,By]。
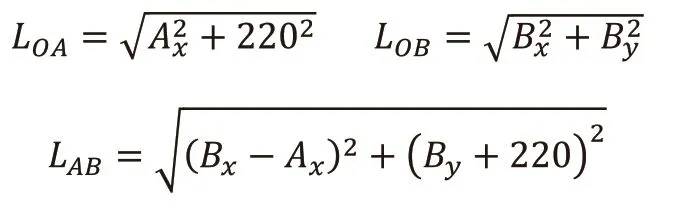
翻身機構各構件長度為:
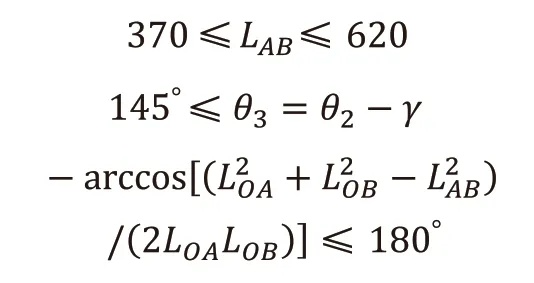
推桿伸縮長度應在行程以內,翻身架的轉角為0°~30°,由式(6)可知:

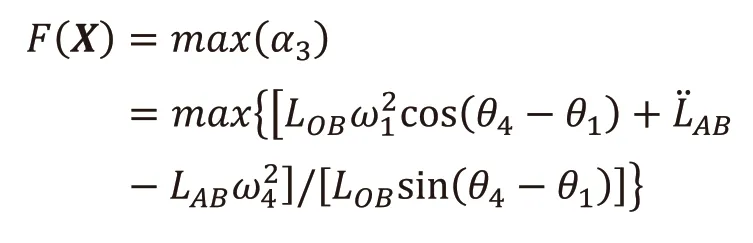
以翻身架最大角加速度為目標函數,由式(7)可知:

優(yōu)化后變量的取值如表4所示,優(yōu)化前后翻身架角加速度曲線對比圖如圖10所示。

表4 優(yōu)化后變量的取值/mm

圖10 優(yōu)化前后翻身架角加速度曲線
3.3 曲腿機構的運動優(yōu)化
初步確定曲腿機構各點的坐標為:O(0,0),A(445,-220),B(-35,-95),C(-35,0),根據護理床的空間布局以及高度方向的尺寸約束,可確定O點的橫縱坐標以及A點的縱坐標。選取Ax、Bx、By為設計變量(下標x代表橫坐標,y代表縱坐標),變量的取值范圍如表5所示。

表5 設計變量的取值范圍/mm
以Ax、Bx、By為優(yōu)化變量,變量矩陣X=[X1,X2,X3]=[Ax,Bx,By]。
曲腿機構各構件長度為:

推桿伸縮長度應在行程以內,曲腿機構的抬腿角度為0°~35°,由式(8)可知:
以活動架最大角加速度為目標函數,由式(9)可知:
優(yōu)化后變量的取值如表6所示,優(yōu)化前后活動架角加速度曲線對比圖如圖11所示。

表6 優(yōu)化后變量的取值/mm
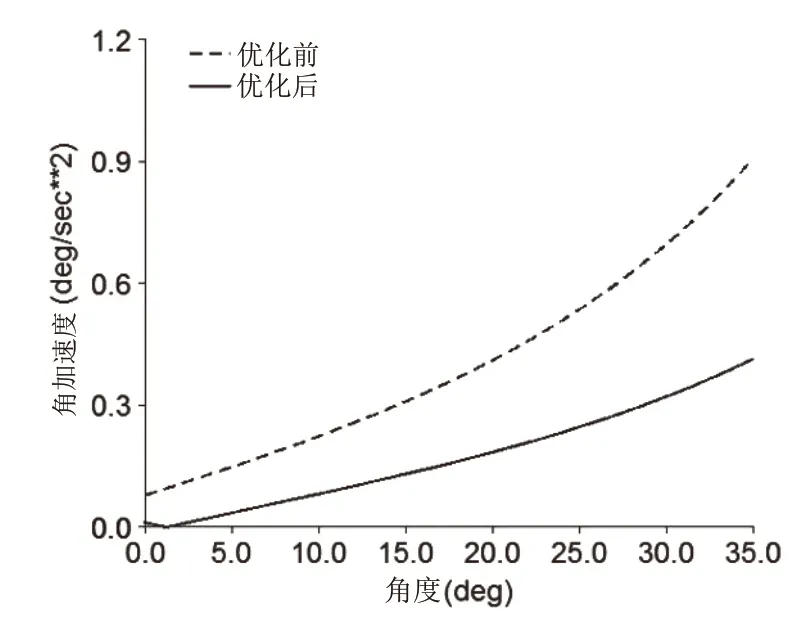
圖11 優(yōu)化前后活動架角加速度曲線
4 結語
為了更好解決臥床病人的康復運動和壓瘡預防這一護理難題,設計了3類翻折機構,所設計的機構原理簡單、動力源精簡、實用性強,能夠提供康復護理所需的各種位姿。建立了翻折機構的運動學模型,借助ADAMS軟件對其進行了優(yōu)化設計,優(yōu)化后翻折機構各執(zhí)行構件的角加速度曲線更加平緩,最大角加速度顯著降低,護理床位姿變換時的平穩(wěn)舒適性得到了提升。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
經濟技術協作信息(2018年20期)2019-01-19 02:56:26
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中國衛(wèi)生(2016年2期)2016-11-12 13:22:32
中國中醫(yī)藥現代遠程教育(2014年20期)2014-03-01 04:31:38
