基于STM32設(shè)計的避障小車
2021-04-04 06:49:04楊帆,雷迪
制造業(yè)自動化 2021年3期
楊 帆,雷 迪
(武漢工程大學,武漢 430205)
0 引言
現(xiàn)今,人工智能已經(jīng)涉及到生活的方方面面,控制領(lǐng)域的智能避障小車也成為人工智能的重要應用之一,并且取得了顯著的成果。一般避障小車分別使用紅外測距傳感器[1]、超聲波傳感器[2]、CCD鏡頭[3]、視頻采集模塊協(xié)同紅外避障模塊[4]作為障礙物識別模塊。在小車操縱上一般通過CCD攝像頭識別灰階軌道使小車做循跡運動[5],或無線手柄、手機[6]連接小車進行人工操控,還有的小車使用電子羅盤進行精確定位以便電腦規(guī)劃路徑控制行駛[7]。算法上分為全局、局部路徑規(guī)劃方法[8],具體的一般使用模糊控制算法[9]、神經(jīng)網(wǎng)絡(luò)算法[10]進行避障路線規(guī)劃。本次設(shè)計的避障小車避障模塊在包含了紅外傳感器、超聲波傳感器外,還添加了傾角傳感器實時檢測小車傾斜角度,使得小車在行駛過程中不會翻倒。小車通過手持紅外遙控器和車載紅外接收器進行人工控制,在遇到障礙物、傾角角度過大可能引起翻倒時根據(jù)設(shè)計的避障程序進行自動避障。
1 避障小車總體設(shè)計
本次避障小車設(shè)計選用STM32F103ZET6芯片作為主控芯片,小車大致可分為五個部分:電源模塊、障礙物檢測部分、控制器模塊、電機驅(qū)動模塊、紅外遙控模塊。選擇手持紅外遙控器作為操作指令輸入。小車系統(tǒng)總體框圖如圖1所示。
2 硬件模塊設(shè)計
2.1 電源模塊
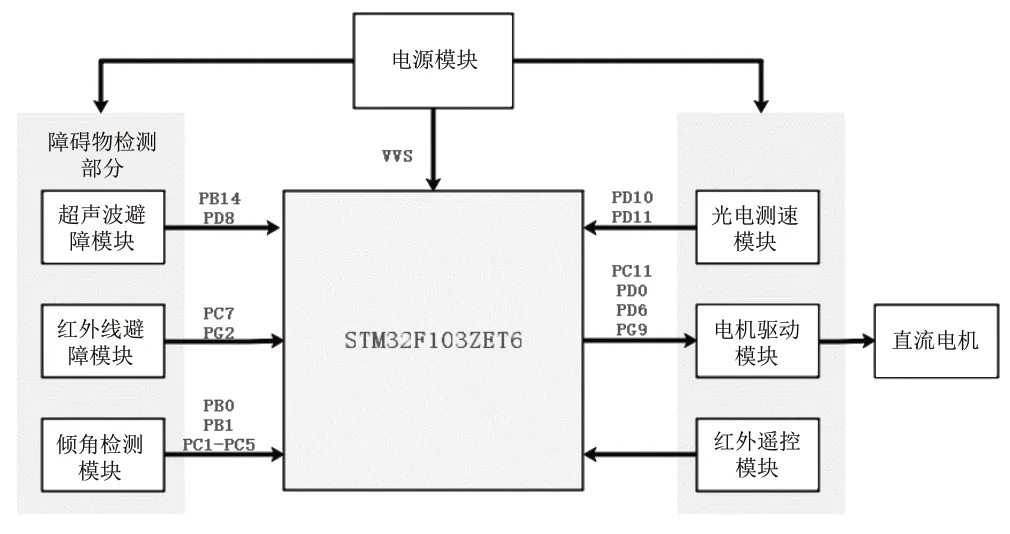
圖1 系統(tǒng)總體框圖
小車串聯(lián)兩節(jié)鋰電池提供7.2V電壓作為初始電源,經(jīng)LM2596S芯片轉(zhuǎn)換提供6V~12V電壓輸出,通過RC電路的調(diào)整為后續(xù)系統(tǒng)提供穩(wěn)定的5V電源,為后續(xù)各個模塊提供5V電源,電源供電模塊如圖2所示。
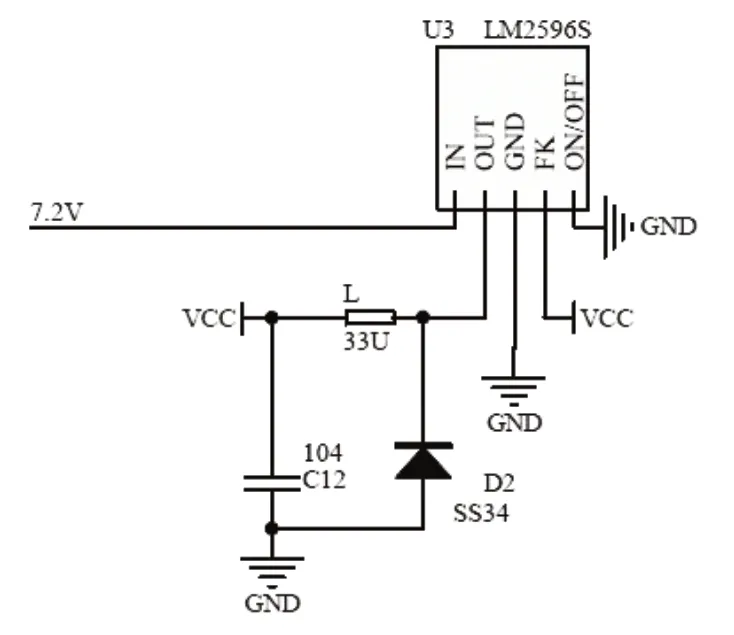
圖2 電源供電模塊電路圖
2.2 超聲波避障模塊
超聲波測距原理:聲音在空中的傳播速度約為340m/s,時間△t為發(fā)射器發(fā)射超聲波的瞬間到接收器接收到超聲波的時長。

根據(jù)式(1)就能測出小車到障礙物的距離S。本文選用的是HC-SR04超聲波模塊,其測距范圍為2cm~400cm。
模塊自動發(fā)送8個40khz的方波,超聲波模塊固定在小車的正前方,用來檢測正前方的障礙物,自動檢測是否有信號返回。有信號返回,通過IO口ECHO輸出一個高電平,高電平持續(xù)的時間就是超聲波從發(fā)射到返回的時間。與主控芯片PB14、PD8相連。超聲波避障模塊電路圖如圖3所示。
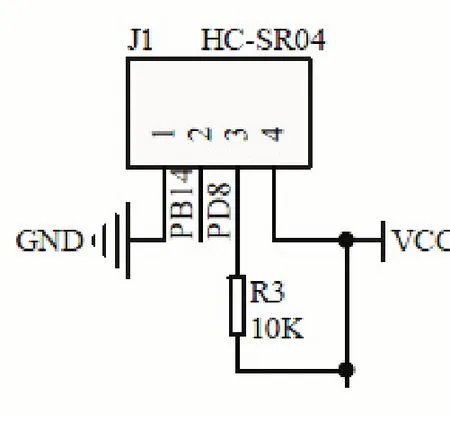
圖3 HC-SR04超聲波模塊電路圖
2.3 紅外線避障模塊
HJ-IR2紅外避障模塊采用紅外光反射原理進行距離估算。該模塊位于車頭左右兩邊。本小車選擇的紅外傳感器,檢測距離為2cm~30cm。在設(shè)計上采用紅外避障模塊與超聲波模塊,兩種方案同時檢測,并依據(jù)兩者測得的距離為轉(zhuǎn)向角提供數(shù)據(jù),兩邊的紅外避障模塊分別與STM32中PC7、PG2相連接,紅外避障模塊電路圖如圖4所示。
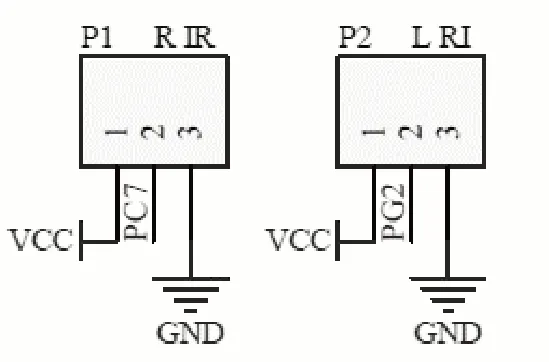
圖4 左右紅外傳感器模塊電路圖
2.4 傾角檢測模塊
該小車使用MMA7361L傾角傳感器,安裝于小車中間部分。如果沿著某個方向(軸向、徑向平行、徑向垂直)活動或受到重力作用,輸出電壓就會根據(jù)其運動方向以及設(shè)定的傳感器靈敏度而改變其輸出電壓,該信號通過(引腳)送入主控芯片,就可以檢測小車傾角。其中MMA7361L芯片Xout、Yout、Zout、SelfTest、g-Select、0g-detect、Sleep輸出端口分別與主控芯片的PB0、PB1及PC1-PC5端口相連。當X、Y、Z各軸的信號在不運動或不被重力作用的作用的狀態(tài)下(即0g狀態(tài)),其輸出為1.65V,檢測靈敏度為800mv/g。令X、Y、Z軸輸出電壓分別為:Ux、Uy、Uz。
三軸輸出電壓計算公式如下:
加速度傳感器Z軸輸出電壓為:
加速度傳感器X軸輸出電壓為:
加速度傳感器Y軸輸出電壓為:
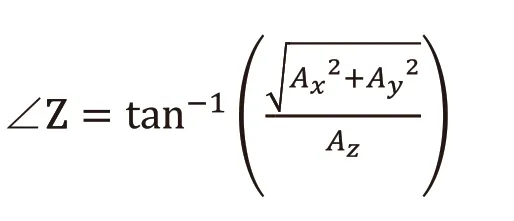
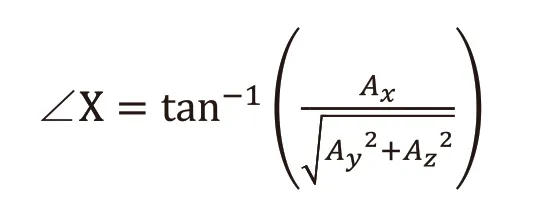
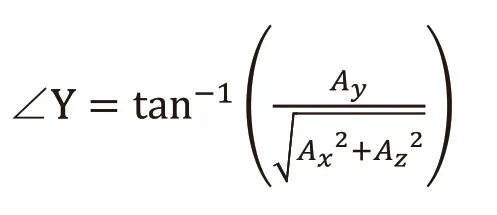
根據(jù)計算所得的三軸電壓,三軸傾角算法如下:
加速度傳感器Z軸與自然坐標系Z軸夾角:
加速度傳感器X軸與自然坐標系X軸夾角:
加速度傳感器Y軸與自然坐標系Y軸夾角:
三軸角度示意圖如圖5所示。
傾角檢測芯片電路圖如圖6所示。
2.5 電機驅(qū)動模塊及直流電機
電機驅(qū)動模塊選用雙H橋L298P電機驅(qū)動芯片,實現(xiàn)4馬達驅(qū)動運行和PWM軟件調(diào)速。L298P驅(qū)動4路直流電機,通過主控芯片的PC11、PD0、PD6、PG9端口相連,輸出改變L298N的控制端電平,以控制電機轉(zhuǎn)動。左電機驅(qū)動模塊電路圖如圖7所示(與右側(cè)車輪相同)。
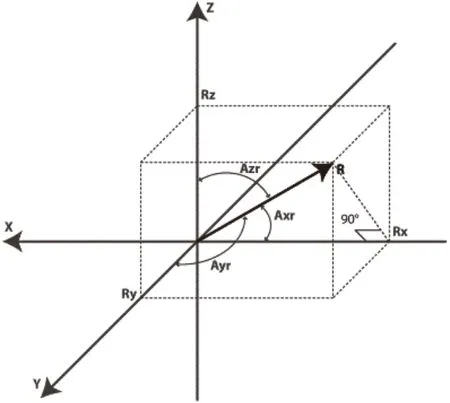
圖5 三軸角度示意圖
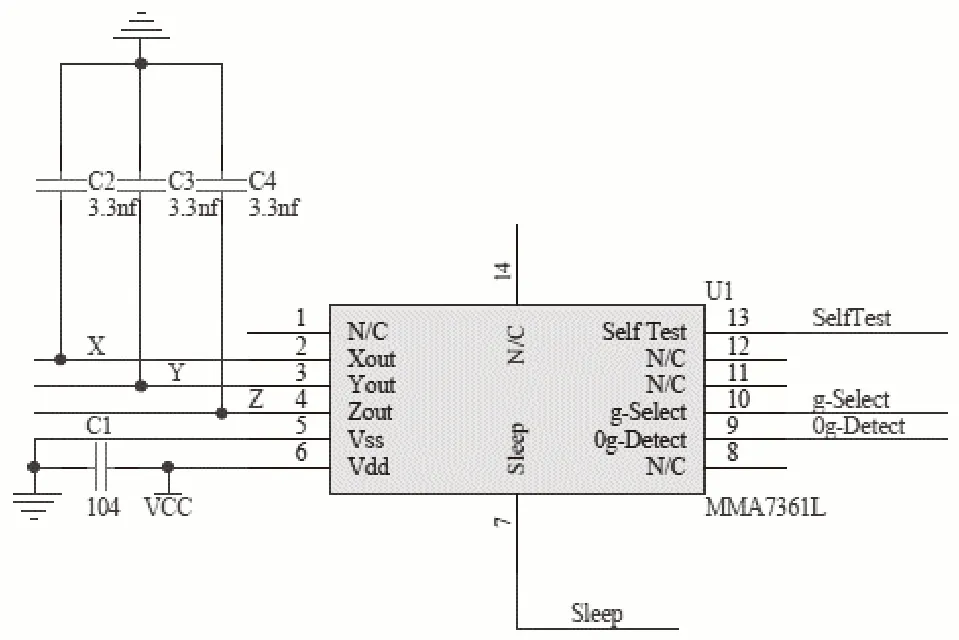
圖6 MMA7361L芯片電路圖
2.6 光電測速模塊
此次智能小車選用HJ-IR6光電測速模塊,位于小車下方后車輪兩側(cè),對車輛行駛時的速度進行精確測量并為主控芯片提供數(shù)據(jù),為小車制動提供速度數(shù)據(jù),其與主控芯片PD10、PD11相連。
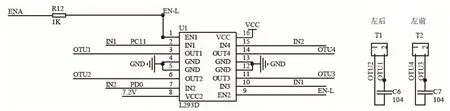
圖7 L298P左側(cè)車輪電機驅(qū)動芯片電路圖
2.7 手持紅外遙控器及紅外遙控接收模塊
設(shè)計的智能小車并未使用循跡控制,而是選擇了紅外遙控的人工控制方式。小車配備紅外接收IR1838芯片模塊與手持紅外遙控器,IR1838芯片輸出端與主控芯片PD10相連。操縱手持紅外遙控器即可對小車進行操縱,紅外接收模塊電路圖及手持紅外遙控器如圖8所示。其中,遙控器“CH”鍵、“+”鍵、“倒放”鍵、“播放暫停”鍵依次對應設(shè)置為小車的上下左右控制鍵,控制小車行駛。
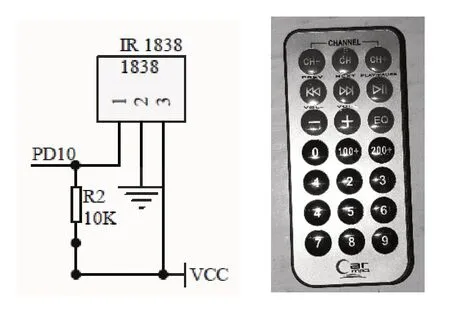
圖8 紅外接收模塊電路圖及手持紅外遙控器
3 軟件設(shè)計
此次設(shè)計中,因選擇STM32F103ZET6作為主控芯片,故使用非常成熟的C語言進行配套編程,配合編譯軟件KeilμVision5進行編譯,完成了主程序及避障程序的設(shè)計。
3.1 主程序設(shè)計
主程序中,對各項函數(shù)進行初始化,清空前期累計數(shù)據(jù)。隨后,小車等待紅外遙控器發(fā)出運動指令,在檢測到傳輸指令并識別后,進入避障程序。避障程序內(nèi)判斷是否觸發(fā)不同種類避障過程。若不觸發(fā)避障過程則執(zhí)行人工操作指令然后返回任務等待步驟。主程序?qū)某绦蛄鲌D如圖9所示。
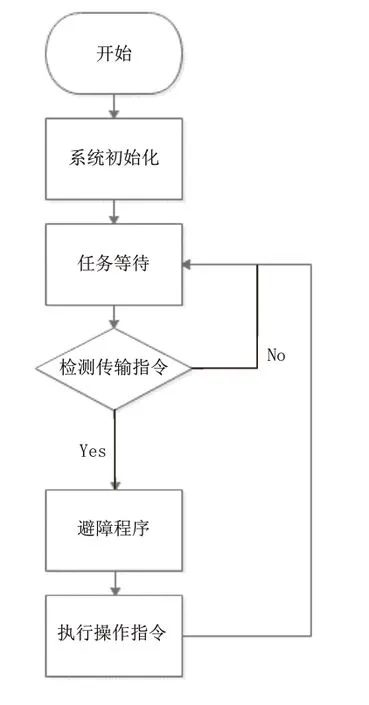
圖9 主程序流圖
3.2 避障程序
主程序中的避障功能是本次設(shè)計小車的重點功能,分別對不同障礙物情況設(shè)計了對應的避障處理程序。其中,光電測速模塊檢測小車速度為后續(xù)避障程序提供速度數(shù)據(jù)。左右紅外測距傳感器測量車身的左右障礙物距離,超聲波傳感器測量小車正面距障礙物距離,傾角傳感器測量車身傾斜角度。避障程序流圖如圖10所示。
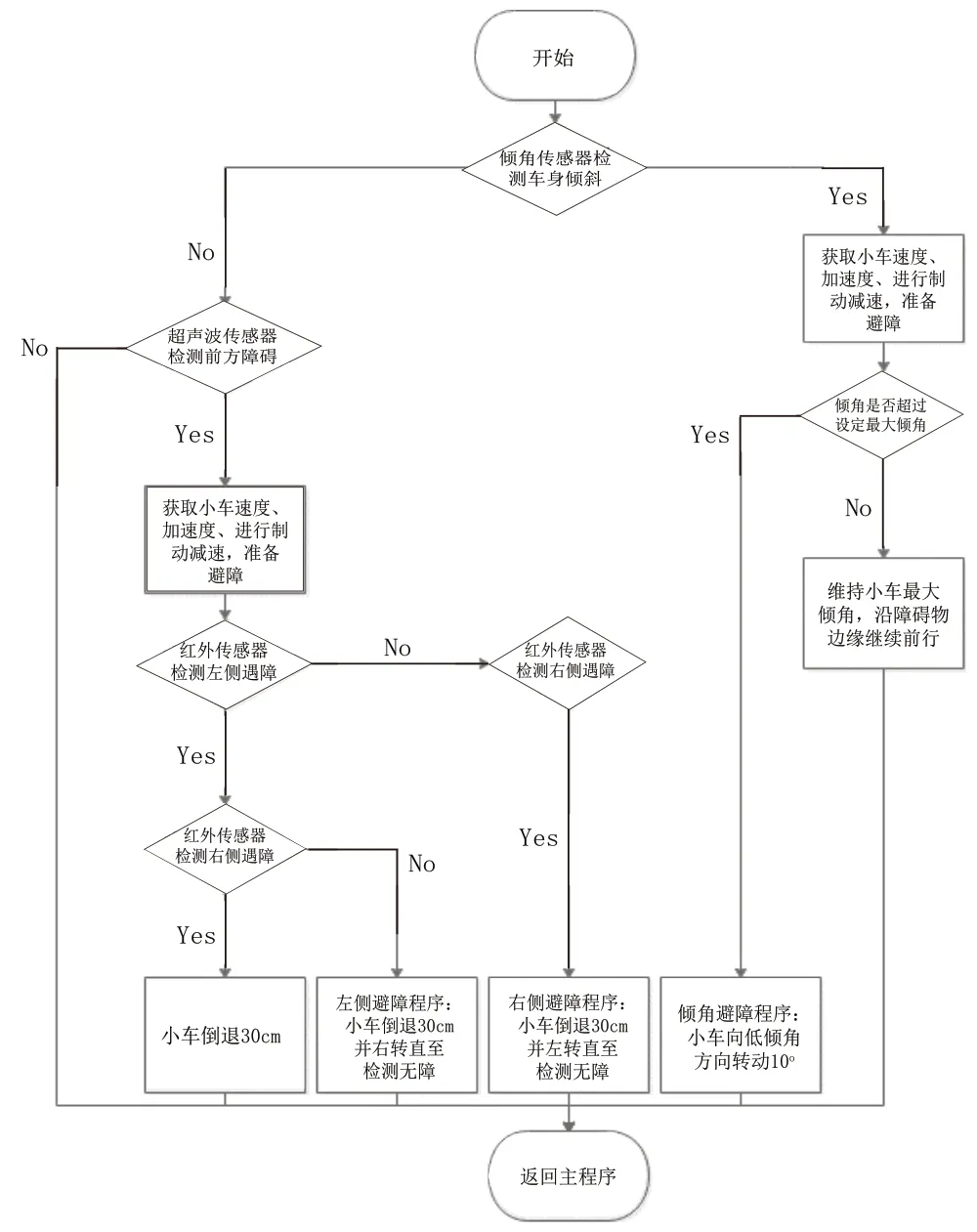
圖10 避障程序流圖
4 實驗結(jié)果及結(jié)束語
實驗設(shè)置兩個主要任務:平整道路行駛避障、傾斜道路行駛避障。在實驗場所設(shè)置多個障礙物,及傾斜坡道。小車上電啟動后,開始根據(jù)遙控器發(fā)出指令進行人工行駛,判斷前方有障礙物后開始避障實驗,如遇到障礙物,小車執(zhí)行避障程序。隨后,小車進行爬坡操作,小車行駛到達程序設(shè)定傾角后轉(zhuǎn)向下坡方向。小車經(jīng)過反復的室內(nèi)測試,調(diào)整紅外傳感器、超聲波傳感器最大檢測距離,在程序中對傾角信號做消抖處理,最終使得小車三種避障方式效果達到預期,順利完成各類障礙物避障要求,實驗成功結(jié)果如圖11、圖12所示。
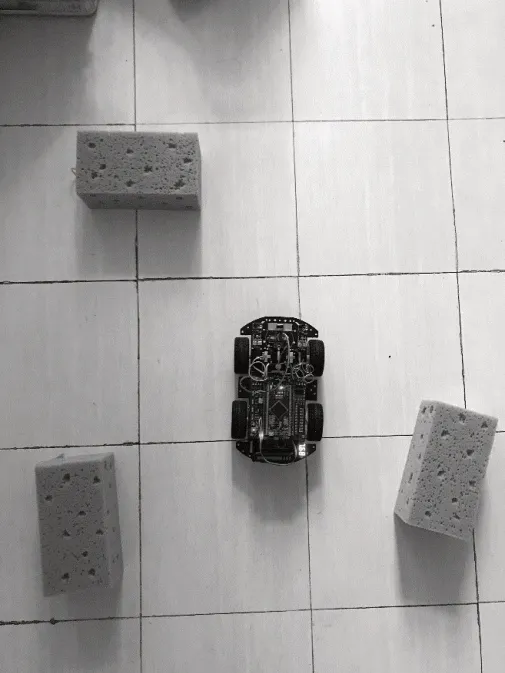
圖11 行駛過程中障礙物避障
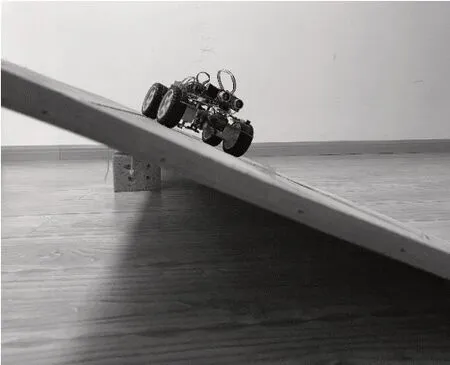
圖12 行駛過程中傾角避障
本文基于STM32設(shè)計出了一款帶傾角避障的智能小車,使用超聲波及紅外避障模塊,傾角檢測模塊檢測障礙物信息,使得小車具備在距障礙物10cm距離外進行避障操作,小車在路面傾角為30°時選擇下坡進行避障操作防止傾倒。通過光電測速器采集速度數(shù)據(jù),構(gòu)成閉環(huán)控制系統(tǒng),從而提高小車速度的控制精度和穩(wěn)定性。
