履帶遙控機器人在裝配式建筑施工領域的應用研究*
2021-03-31 08:30:26
科學與信息化 2021年8期
桂林電子科技大學 建筑與交通工程學院 廣西 桂林 541004
引言
當前建筑領域,傳統澆筑式建筑越來越難以滿足在建筑施工效率、環境保護等方面的要求。裝配式建筑在減少污染、提高建筑施工效率和質量等方面具有顯著優勢,也越來越被人們重視[1]。裝配式建筑大大簡化施工工序,但對建筑施工裝備的要求也更高。
近年來,國際上掀起了“建筑智能裝備(機器人)”研究的熱潮,相關建筑智能裝備相繼問世,表明基于智能裝備技術的智能建造已成為時代潮流。國內外建筑智能裝備的研發主要圍繞著墻體砌筑機器人,墻/地面施工機器人,清拆/清運作業機器人,3D打印建筑機器人,可穿戴輔助施工機器人系統等[2-4]。In-situ Fabricator公司的墻體砌筑機器人Hadrian109,可基于CAD 3D模型自主完建筑物的營建[2]。河北工業大學、河北建工集團在863計劃的支持下所研發的C-ROBOT-I,是我國第一套面向建筑板材安裝的輔助操作機器人系統[3]。
本項目針對裝配式建筑構件吊裝施工中存在的安全性、效率等問題,提出研發智能化的吊裝輔助裝備。擬解決的關鍵技術問題有:機器人結構與動力設計,機器人信息采集、傳輸與電氣控制,智能化信息處理技術,系統優化控制等。
1 機器人的結構與動力設計
履帶式行走結構,對建筑施工現場的復雜地形具有良好的環境適應性。機器人采用遠程遙控手段實現行走、作業等控制。機器人動力系統可分為電動、氣動和液動系統。液動驅動系統驅動平穩,操作簡單,其更適合建筑施工領域的應用。
本文設計的機器人采用方形履帶,與地面接觸面積較大,穩定性好。機器人底盤由履帶板、主動輪、拖帶輪、從動輪及液壓馬達等組成。液壓馬達與左右兩主動輪相連,通過控制液壓馬達實現機器人的前進、后退及轉向。機器人動力系統的柴油發動機轉速固定(可手動調節),通過電液比例閥開度控制機器人行走和工作屬具的運動速度。
2 機器人信息采集、傳輸與電氣控制
2.1 遙控器子系統
(1)遙控器子系統的硬件設計
遙控器子系統主要包括微控制器、通信、調試及人機交互模塊。因遙控器系統需要執行指令較少,任務調度較簡單,因此微控制芯片選用STM32F103芯片;采用433MHZ頻段進行無線數據傳輸;遙控器人機交互模塊中設置搖桿、按鍵、撥動開關及推桿等輸入設備,使用OLED顯示屏顯示主要工作參數[1]。
(2)遙控子系統的軟件設計
遙控器軟件基于FreeRTOS操作系統編寫。主要包括模擬量輸入檢測、開關量輸入檢測等程序模塊。模擬量輸入檢測程序共開啟6個ADC轉換通道;共開啟了9個外部中斷的開關量輸入通道;串口通信程序配置較為簡單,與基本串口通信配置一致;通信協議基于系統定時器,每10ms將所有數據打包發送至無線透傳模塊,經接收控制器解析后由CAN總線發送至主控制芯片。
2.2 主控制系統
(1)主控制系統的硬件設計
主控制系統硬件部分包括電源電路、發動機電啟動電路、主從機通訊電路、控制器電路、液壓比例閥驅動電路、有線調試電路、傳感器接口電路及繼電器控制電路等。采用STM32F429芯片作為主機執行控制輸出部分功能,采用STM32F103芯片作為從機執行數據交互部分功能,主從機交互采用CAN通信方式;液壓系統、發動機及電瓶工作狀態使用相應的專用傳感器進行數據采集,工作環境數據使用攝像頭模塊進行數據采集;繼電器輸出接口使用TLP521信號隔離,通過一個達林頓晶體管ULN2803驅動。使用A4950芯片實現PWM方式控制比例閥開度。
(2)主控制系統的軟件設計
本系統共開啟9個任務:LED控制任務、數據接收任務、數據發送任務、數據采集任務、發動機啟動任務、大燈及喇叭控制任務、機械臂控制任務、車體運動控制任務、急停控制任務。在軟件啟動時,根據各任務的特點,設置其優先級。CAN通信程序軟件中設置TS1=9,TS2=5,BRP=6,STM32F429APB1頻率為45MHZ,可得CAN通信波特率為500Kbps。共設計3路模擬輸入,4路開關輸入及一路脈沖檢測輸入。通過設定ARR和CCRx的值設定單片機輸出PWM脈沖的頻率及占空比。
3 智能化信息處理技術
機器人智能化信息處理主要是完成安裝工件的識別、工件軌跡預測以及工件與機器人手爪的相對定位等問題。
利用圖像處理技術,將Open MV采集的包含工件的局部圖像進行灰度化處理、濾波,進而對工件進行特征點提取和邊緣檢測,主控芯片采用基于特征的匹配算法對工件進行立體匹配。再將操控指令的作為輸入,通過雷達測距模塊獲取工件周圍環境參數作為反饋信息,對工件運動軌跡建立數學模型,通過軌跡運動算法預測出工件精準的運動趨勢,給出最優操作指導。
4 系統優化控制
采用PWM脈寬調制技術結合PID算法完成對機器人的實時動態控制,從而使整個機器人運動控制更加穩定可靠。
在單片機系統中實現PID算法,必須對PID算法進行離散化。離散化PID算法分為位置式和增量式。本文對于電液比例閥則采用位置式PID,其表達式如下式:
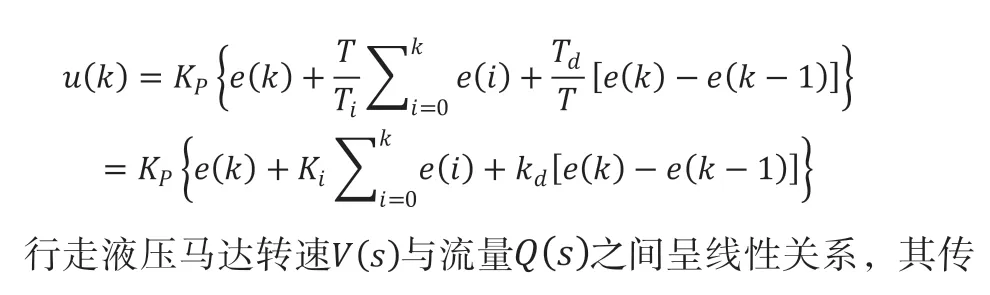
將機器人速度數據與設定速度值的偏差信號作為PID控制器的輸入,以調整控制系統的各項參數,左右液壓行走馬達分別做PID控制。其控制框圖如圖1:

圖1 液壓行走馬達的控制框圖
5 結束語
本文研制了能夠用在裝配式建筑施工領域的半自主式履帶機器人,設計了機器人電控系統,利用了Open MV圖像識別與定位技術,研究工件運動軌跡預測,進而完成工件姿態信息判斷,實現多方信息共享,提高施工效率,體現了人機協同的技術發展趨勢。
猜你喜歡
北方建筑(2021年6期)2021-12-31 03:03:54
大眾投資指南(2021年23期)2021-12-06 05:47:12
建材發展導向(2021年18期)2021-11-05 09:20:06
建材發展導向(2021年16期)2021-10-12 05:39:50
建材發展導向(2021年16期)2021-10-12 05:39:32
建材發展導向(2021年13期)2021-07-28 07:15:54
文苑(2020年10期)2020-11-07 03:15:36
現代裝飾(2020年6期)2020-06-22 08:43:12
現代裝飾(2020年4期)2020-05-20 08:55:08
建材發展導向(2019年10期)2019-08-24 06:26:00
