基于實測地形的米波雷達測高方法
2021-03-30 03:01:00謝騰飛楊雪亞
雷達科學(xué)與技術(shù) 2021年1期
謝騰飛,楊雪亞,朱 偉
(1. 中國電子科技集團公司第三十八研究所,安徽合肥 230088;2. 孔徑陣列與空間探測安徽省重點實驗室,安徽合肥 230088)
0 引言
米波雷達因受波長、天線尺寸和架高等因素限制,天線波束寬度寬、角分辨率低,低仰角目標由于多徑反射[1-3]和波瓣分裂效應(yīng),常規(guī)和差波束測角[4]完全失效。必須尋求陣列超分辨處理等新的測高方法,對雷達接收的低仰角目標直達回波和多徑反射回波進行角度超分辨并估計目標直達仰角和目標高度[5-6]。
但是并不是所有的雷達陣地周圍都有比較多的民航或訓(xùn)練機提供二次雷達高度信息,來形成地形參數(shù)表,如果不能形成地形參數(shù)表,那么基于地形參數(shù)匹配的最大似然測高算法的誤差會比較大,這時我們可以使用全站儀等設(shè)備對陣地周邊的地形起伏進行測量。但得到的地形參數(shù)表是和反射點距離一一對應(yīng)的,而且由于沒有目標的距離、仰角或高度中的任一信息,因此不能將其轉(zhuǎn)換為與搜索仰角一一對應(yīng)的地形參數(shù)表,所以需要對文獻[8]的算法進行調(diào)整,以適應(yīng)新的地形參數(shù)表,本文即是基于實測地形表的最大似然測高算法。
1 反射點距離
在遠距離探測時,地球曲率對目標高度測量有較大的影響,為了使信號模型更加精確,除了要考慮在對流層由于折射引起的信號路徑的彎曲和地球本身的曲率外,還必須考慮反射區(qū)的地形等參數(shù)。
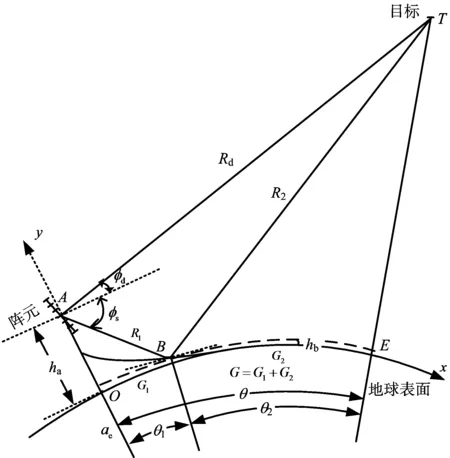
圖1 球面模型多徑幾何關(guān)系圖
考慮如圖1所示均勻線陣的球面模型,入射信號為窄帶球面波。以陣面中心在海平面的投影點O為坐標原點,沿地球表面為x軸,垂直地球表面為y軸,建立曲線坐標系,陣面中心A的海拔高度為ha。
T點為目標,其垂直坐標為hty;E點為目標的地/海平面投影點;ae為等效地球半徑;B點為地面反射中心,該反射點的海拔高度為hb;弧長G和G1分別表示O點與目標在地/海平面投影點的曲線長及其與反射點的曲線長,θ和θ1分別表示相應(yīng)的地心夾角。目標直達波和地面反射波的波程分別為Rd和Rs,Rs=R1+R2,R1,R2分別為B點與A點的距離和B點與T點的距離。φd和φs分別為直達波入射角和反射波入射角。
反射點高度為hb,可以認為地球半徑、陣元高度及目標高度等效為

(1)

(2)

(3)
根據(jù)圖1的幾何關(guān)系,首先利用直達角φd計算出目標的垂直坐標:

(4)
因此,地心夾角θ為

(5)
目標的水平坐標為
(6)
根據(jù)Fishback三次方程可以解出其他參數(shù):
(7)
該方程的解為
(8)
式中,
(9)
(10)
距離為100 km的目標,雷達陣地周圍為平坦地面,在不同的反射點與陣面中心高度差情況下,反射點與雷達距離隨目標高度變化曲線如圖2所示。可以看出,目標高度固定時,反射點與陣面中心的高度差越大,反射點與雷達的距離越遠;反射點與雷達的距離固定時,目標高度越高,反射點與陣面中心的高度差變化對目標高度的影響越大;反射點與陣面中心的高度差固定時,目標高度越低,反射點與雷達的距離越遠;目標高度越低,反射點與陣面中心的高度差變化對反射點與雷達的距離影響越大。因此,得到精確的反射點與陣面中心高度差對提高目標的測角精度具有重大的現(xiàn)實意義。

圖2 反射點與雷達距離隨目標高度變化曲線圖
2 基于實測地形的測高方法
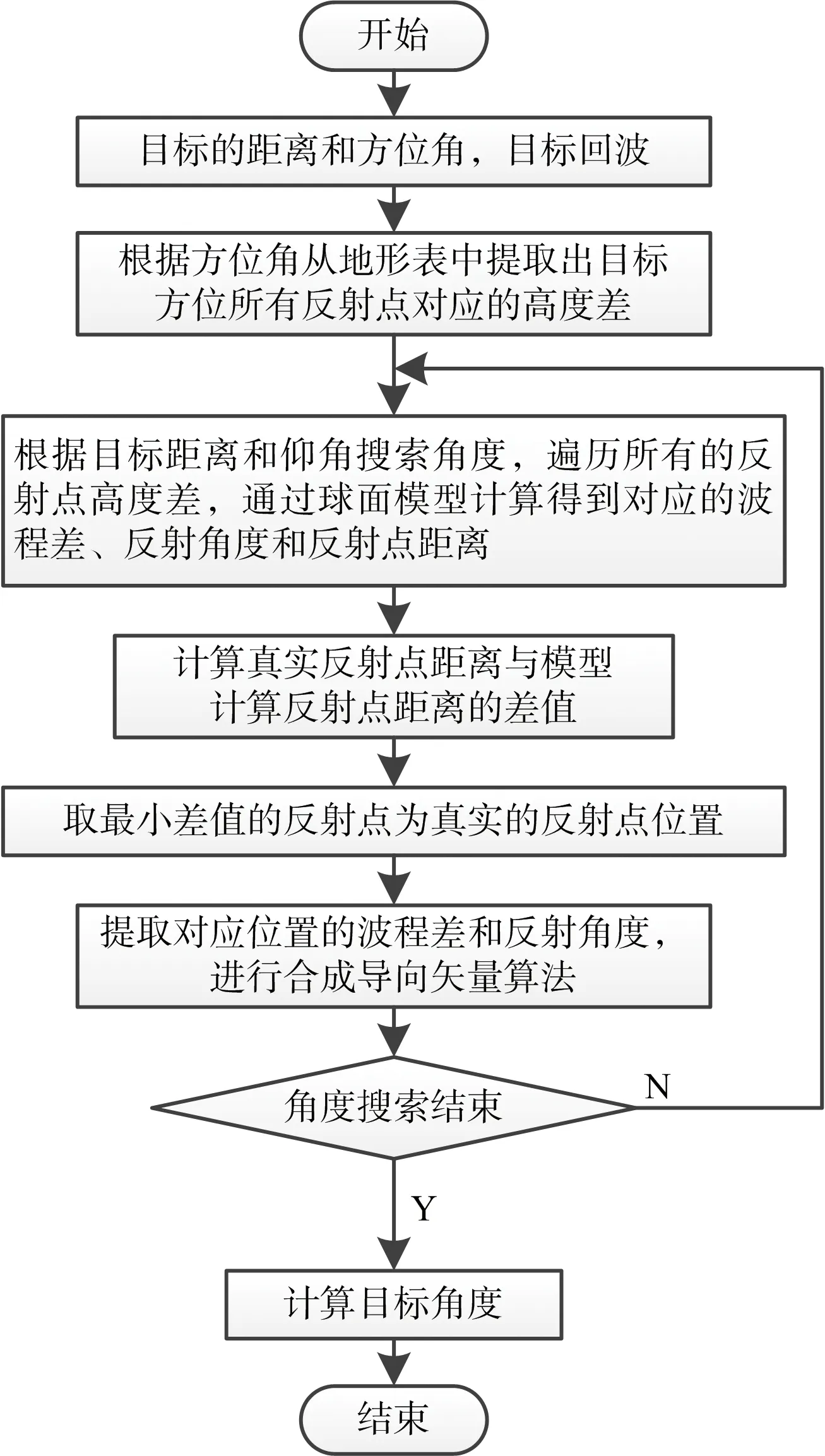
圖3 基于實測地形的測高方法流程圖
由于真實的雷達陣地并不是完全平坦的,會有一定的起伏。由上一節(jié)可知,如果雷達陣地近區(qū)地勢高,遠區(qū)地勢低,那么會出現(xiàn)兩個或者多個滿足鏡面反射模型的反射點,而雷達周圍陣地的地形是起伏的,因此不能直接得到目標多徑回波地面反射點的位置。本文提出了一種遍歷的方法來求得目標的相對精確反射點位置,具體流程如圖3所示,在進行測高前,需要將全站儀等設(shè)備測量得到的雷達陣地周圍地形量化為方位-距離的二維地形表,如方位360°量化為步進1°,距離向 1 500 m量化為步進10 m。
圖3所示的方法雖然可以利用實測的地形數(shù)據(jù)進行合成導(dǎo)向矢量算法測高,但由于需要進行反射點高度和目標仰角的二維搜索,因此運算量比較大,下面再提出一種減小運算量的方法,流程如圖4所示。從圖2可知,雷達周圍陣地起伏越小,即h1與h2的差值越小,則最大反射點距離與最小反射點距離越接近,遍歷反射點高度差的次數(shù)越少,可以達到減小運算量的目的。
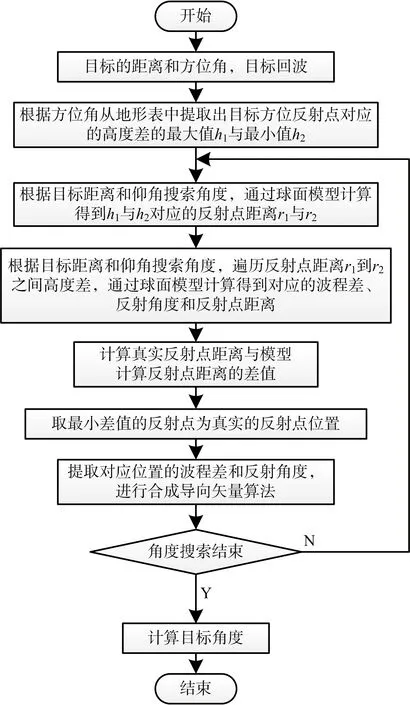
圖4 基于實測地形的測高優(yōu)化方法流程圖
3 實測數(shù)據(jù)分析
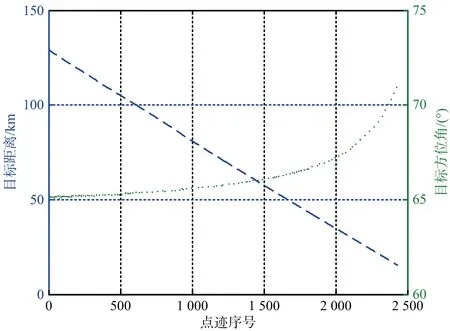
圖5 目標距離和方位角隨點跡序號的變化圖
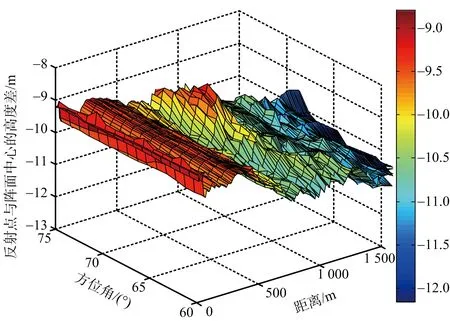
圖6 雷達陣地周圍地形起伏量化三維圖
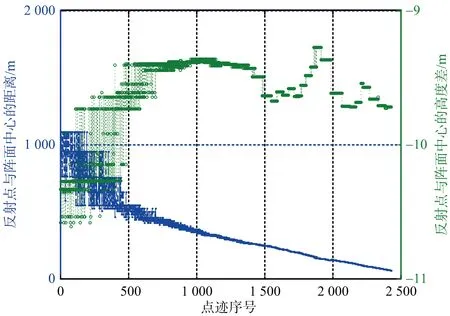
圖7 目標點跡的反射點距離和反射點高度
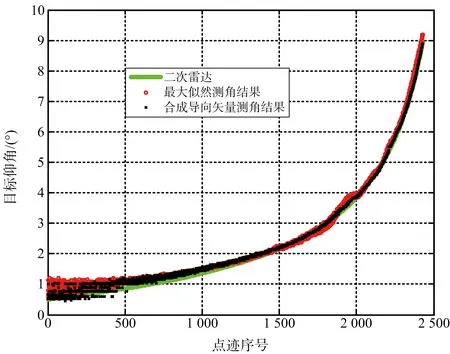
圖8 俯仰角測量結(jié)果
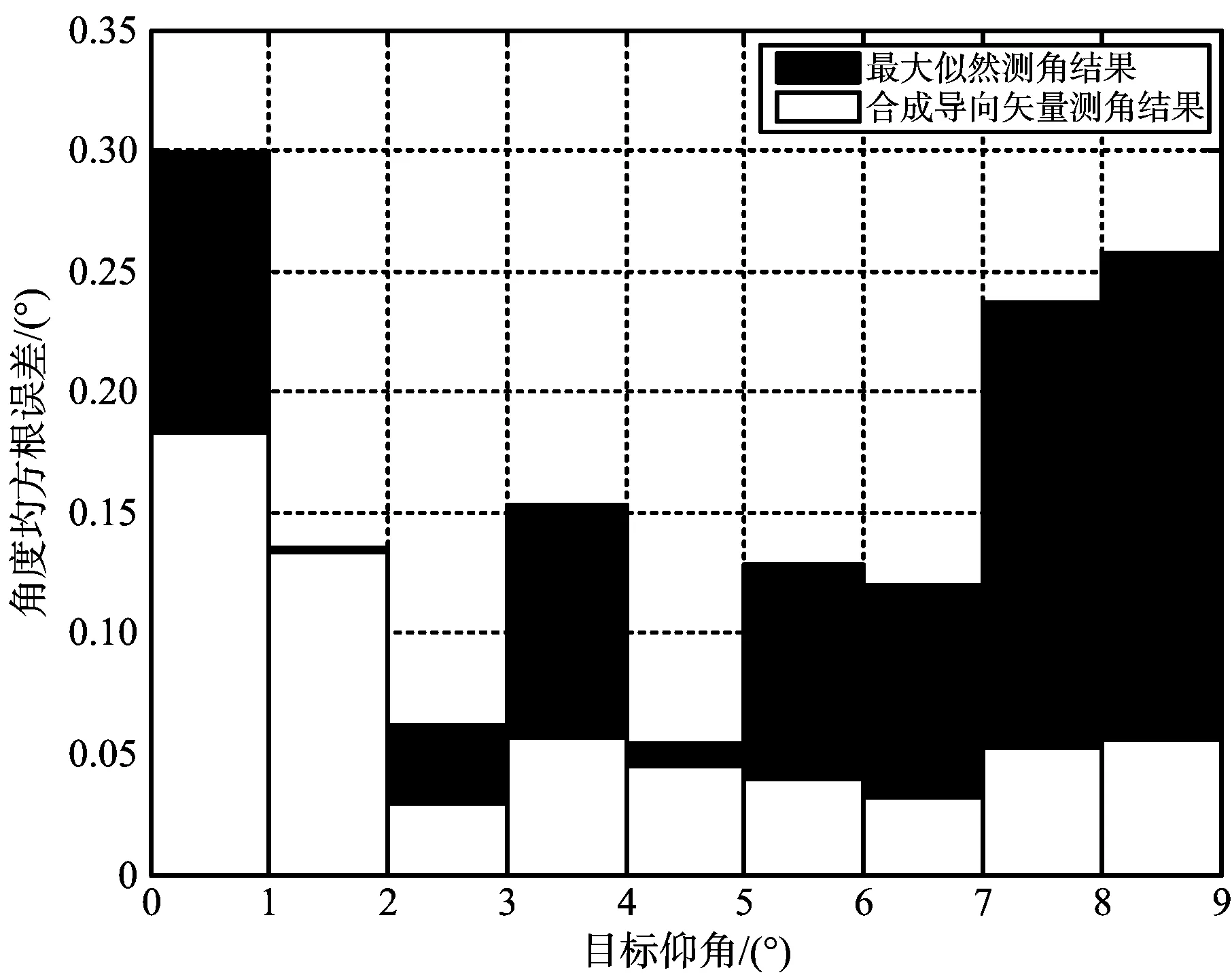
圖9 俯仰角測量均方根誤差
下面利用某型米波雷達在平坦陣地采集的實測數(shù)據(jù)驗證本方法的有效性。圖5為目標距離和方位角隨點跡序號的變化圖,從圖中可以看出目標的方位角在65°~72°之間。圖6為利用全站儀測量得到的60°~75°方位雷達陣地周圍地形起伏量化三維圖(方位量化單位1°,距離量化單位10 m,以陣面中心為基準,向下為負),從圖中可以看出在距離雷達陣地1 500 m內(nèi)地形起伏在3 m左右,地形相對比較平坦。利用上一節(jié)的方法,可以得到每個目標點跡的反射點距離和反射點高度,如圖7所示;利用圖7所示的反射點位置進行合成導(dǎo)向矢量算法測量俯仰角,與不利用地形數(shù)據(jù)的最大似然算法[9-10]測角結(jié)果對比如圖8所示,同時也畫出了二次雷達(second radar)的結(jié)果。圖9為仰角步進1°統(tǒng)計的兩種算法測角均方根誤差,從圖中可以看出基于實測地形的合成導(dǎo)向矢量算法的測角誤差全面優(yōu)于不利用地形數(shù)據(jù)的最大似然算法。從圖7~圖9還可以發(fā)現(xiàn),目標的仰角越小,反射點的位置變化越大,對應(yīng)的反射點高度變化也比較大,導(dǎo)致測角誤差也越大,且目標仰角在2°以上時,合成導(dǎo)向矢量算法測角的均方根誤差在0.06°以內(nèi)。
4 結(jié)束語
對于米波雷達由于多徑效應(yīng)嚴重導(dǎo)致俯仰角測量結(jié)果差的難題,在沒有二次雷達高度信息對地形參數(shù)進行優(yōu)化的情況下,本文提出了一種基于實測地形的合成導(dǎo)向矢量測角流程方法,該方法通過測量陣地周圍的地形數(shù)據(jù),進行量化得到地形參數(shù)表,在雷達正常工作時,調(diào)取目標點跡對應(yīng)方位的地形參數(shù),并通過球面模型計算出與真實地形相匹配的反射點位置,然后進行合成導(dǎo)向矢量算法測角,對測角流程進行了優(yōu)化,減小了運算量。最后通過對某米波段雷達實測數(shù)據(jù)進行分析,證明該方法的測角誤差全面優(yōu)于不使用地形數(shù)據(jù)的最大似然測角算法。
雖然優(yōu)化流程減小了運算量,但相對于由二次雷達高度信息得到地形參數(shù)表進行一維角度搜索的測角算法,該方法需要進行一部分的二維搜索,因此該方法的運算時間增加了很多,以上一節(jié)的數(shù)據(jù)進行分析,運算時間大概增加了10倍左右,當然,如果增大建表的距離維步進,或者根據(jù)一些其他信息,對目標點跡的反射點位置進一步地進行限制,運算時間也會大幅度地減小。雖然此方法運算量比較大,但在沒有二次雷達高度信息得到地形參數(shù)表的情況下,測角精度大大優(yōu)于最大似然算法,因此還需要進一步的研究,以期可以達到工程實施的目的。