基于小波濾波和LSTM 神經(jīng)網(wǎng)絡(luò)的船舶運(yùn)動(dòng)極短期預(yù)報(bào)研究
2021-03-29 10:06:44劉長德顧宇翔張進(jìn)豐
船舶力學(xué) 2021年3期
劉長德,顧宇翔,張進(jìn)豐
(1.中國船舶科學(xué)研究中心,江蘇無錫214082;2.中船重工奧藍(lán)托無錫軟件技術(shù)有限公司,江蘇無錫214082)
0 引 言
船舶在海上航行過程中,由于受到風(fēng)、浪、流等環(huán)境因素的干擾,運(yùn)動(dòng)具有很強(qiáng)的隨機(jī)性和非線性,尤其在惡劣的海況條件下,船舶的航行和海上作業(yè)會有很大的安全隱患。如果能提前預(yù)報(bào)未來時(shí)刻的運(yùn)動(dòng)狀態(tài),獲得未來船舶運(yùn)動(dòng)的暫息期,對于輔助船舶的特定作業(yè)具有重要指導(dǎo)意義。
目前,國內(nèi)外對船舶運(yùn)動(dòng)極短期預(yù)報(bào)的研究一般采用離線濾波方法,利用去除高頻噪聲后的數(shù)據(jù)進(jìn)行預(yù)報(bào)結(jié)果的分析。對于船舶運(yùn)動(dòng)實(shí)測數(shù)據(jù),所采集的數(shù)據(jù)不可避免地存在高頻噪聲,從而造成信噪比嚴(yán)重降低,文獻(xiàn)[1]中以DDG-51 驅(qū)逐艦為例離線分析了測量噪聲對船舶運(yùn)動(dòng)極短期預(yù)報(bào)精度的影響,尤其是在運(yùn)動(dòng)峰值處會導(dǎo)致較大的預(yù)報(bào)誤差,因此進(jìn)行極短期預(yù)報(bào)時(shí),必須對信號進(jìn)行濾波處理。傳統(tǒng)的濾波方法是將信號進(jìn)行傅里葉變換,去除掉高頻噪聲,保留有用信號,通過逆變換得到真實(shí)信號。該方法雖然能去掉噪聲,但易產(chǎn)生高頻失真,而小波變換克服了傅里葉變換中時(shí)域的瞬間變化在頻域不能反映出來的缺陷,其在低頻部分具有較高的頻率分辨率和較低的時(shí)間分辨率,在高頻部分具有較高的時(shí)間分辨率和較低的頻率分辨率,這正符合低頻信號變化緩慢,而高頻信號變化迅速的特點(diǎn)[2]。在大尺度下,可以將信號的低頻信息全局表現(xiàn)出來,在小尺度下,可以將高頻局部特性表現(xiàn)出來,其優(yōu)點(diǎn)在慣性導(dǎo)航系統(tǒng)信號分析中得到了充分體現(xiàn)[3],這種特性使小波變換為船舶運(yùn)動(dòng)信號實(shí)時(shí)濾波提供了理論基礎(chǔ)。
國內(nèi)外對船舶運(yùn)動(dòng)極短期預(yù)報(bào)都非常重視并展開了許多研究,文獻(xiàn)[4]對國內(nèi)外研究現(xiàn)狀進(jìn)行了歸納總結(jié),其中利用時(shí)間序列分析法對船舶運(yùn)動(dòng)姿態(tài)進(jìn)行極短期預(yù)報(bào)越來越受到重視,早期的船舶運(yùn)動(dòng)極短期預(yù)報(bào)假設(shè)船舶在海浪中的運(yùn)動(dòng)姿態(tài)為一平穩(wěn)的窄帶隨機(jī)過程,采用AR 模型[5]或ARMA 模型[6-8]實(shí)現(xiàn)了船舶運(yùn)動(dòng)姿態(tài)的實(shí)時(shí)預(yù)報(bào)。由于船舶運(yùn)動(dòng)具有較強(qiáng)非線性、非平穩(wěn)甚至混沌特性,使得隨著預(yù)報(bào)時(shí)間的增加,其預(yù)報(bào)精度下降明顯,且運(yùn)動(dòng)相位誤差變大,文獻(xiàn)[9]針對船舶運(yùn)動(dòng)姿態(tài)在隨機(jī)海浪作用下的非線性特性,利用Volterra 級數(shù)的非線性表征能力,給出了船舶運(yùn)動(dòng)姿態(tài)時(shí)間序列的二階Volterra 自適應(yīng)預(yù)測模型。隨著機(jī)器學(xué)習(xí)及各種算法的提出,本世紀(jì)初,國內(nèi)外學(xué)者應(yīng)用人工神經(jīng)網(wǎng)絡(luò)對船舶運(yùn)動(dòng)極短期預(yù)報(bào)展開了研究,Khan 等[10]建立了BP 神經(jīng)網(wǎng)絡(luò)和遺傳算法相結(jié)合的方法,并與ARMA 預(yù)報(bào)模型進(jìn)行了比較分析,驗(yàn)證了神經(jīng)網(wǎng)絡(luò)非線性建模優(yōu)點(diǎn);Khan 等[11]結(jié)合神經(jīng)網(wǎng)絡(luò)、模糊邏輯與數(shù)據(jù)融合技術(shù)實(shí)現(xiàn)了船舶運(yùn)動(dòng)極短期預(yù)報(bào)的工程應(yīng)用;文獻(xiàn)[12]結(jié)合混沌相空間重構(gòu)理論和RBF神經(jīng)網(wǎng)絡(luò)對極短期預(yù)報(bào)中建模數(shù)據(jù)、輸入變量和收斂速度等進(jìn)行了系統(tǒng)分析,為極短期預(yù)報(bào)工程化提供了理論基礎(chǔ)。隨著計(jì)算能力的提升,深度神經(jīng)網(wǎng)絡(luò)開始出現(xiàn)在時(shí)間序列預(yù)報(bào)中,得益于深度學(xué)習(xí)算法和硬件技術(shù)的突破,深度神經(jīng)網(wǎng)絡(luò)在相關(guān)領(lǐng)域攻克了許多難題,涌現(xiàn)出了許多基于機(jī)器學(xué)習(xí)算法的非線性時(shí)間序列預(yù)報(bào)模型[13-15],其中LSTM神經(jīng)網(wǎng)絡(luò)有效解決了深度網(wǎng)絡(luò)梯度爆炸、消失問題。
綜上所述,本文針對船舶運(yùn)動(dòng)非線性特性和測量噪聲對極短期預(yù)報(bào)精度的影響,在多分辨率分析理論的基礎(chǔ)上,建立了船舶運(yùn)動(dòng)小波分解、閾值處理和重構(gòu)算法,并通過模型試驗(yàn)數(shù)據(jù)研究了不同小波基函數(shù)和分解尺度對濾波效果的影響,進(jìn)一步結(jié)合LSTM 神經(jīng)網(wǎng)絡(luò),建立了多步直接映射船舶運(yùn)動(dòng)極短期預(yù)報(bào)方法,為船舶運(yùn)動(dòng)非線性逼近建模問題提供了有效的解決途徑。
1 船舶運(yùn)動(dòng)信號小波濾波
1.1 小波變換
在小波變換分析中,對應(yīng)的函數(shù)空間為L2(R),L2(R)為R 上平方可積函數(shù)構(gòu)成的空間。設(shè)函數(shù)f(t) ∈L2(R),其關(guān)于基小波的ψa,b(t)連續(xù)小波變換的數(shù)學(xué)表達(dá)式為

連續(xù)小波變換是冗余的,計(jì)算中不可能對所有尺度因子和平移參數(shù)小波變換,且實(shí)際的處理數(shù)據(jù)都是離散的,因此本文采用離散小波變換。


對f(t) ∈L2(R),其離散小波變換為

通常取a0=2和b0=1,則ψk,n(t) = 2-k/2ψ(2-kt - n), k,n ∈Z。
為使得小波變換計(jì)算更加有效,所構(gòu)造的小波函數(shù)一般具有正交性,即ψk,n(t)、ψk′,n′(t)滿足

則ψj,k(t)構(gòu)成L2(R)上規(guī)范正交基,稱為二進(jìn)制正交小波基。
1.2 多分辨率分析與Mallat算法
Mallat 提出了多分辨率的概念,在多分辨率分析理論的基礎(chǔ)上,提出了一種塔式快速小波分解算法和重構(gòu)算法,Mallat算法保證了分解后數(shù)據(jù)點(diǎn)數(shù)和分解前數(shù)據(jù)點(diǎn)數(shù)相同,是無冗余的小波變換。
對于一個(gè)多分辨分析中任意子空間Vj,Wj是Vj關(guān)于Vj+1的正交補(bǔ)空間,則Vj可分解為

進(jìn)一步可得Vj中的任意函數(shù)fj(t)都存在如下多分辨率分析表示:


小波重構(gòu)算法是基于尺度函數(shù)和小波函數(shù)的二尺度關(guān)系,通過小波逆變換,使得原函數(shù)能夠根據(jù)不同尺度的分量完全恢復(fù)。考慮第j個(gè)分辨率下的分量和

將二尺度方程代入式(5)可得


通過多分辨率分析方法,將含噪信號進(jìn)行多尺度小波變換,從時(shí)域變換到小波域,在各尺度下提取信號的小波系數(shù),去除含噪聲的小波系數(shù),然后用小波逆變換重構(gòu)信號。
1.3 船舶運(yùn)動(dòng)小波濾波分析
采用船舶模型試驗(yàn)數(shù)據(jù)進(jìn)行濾波效果驗(yàn)證分析,試驗(yàn)工況為艏斜浪135o、航速6 kn。為了更好地確定分解層數(shù),采用周期圖法對船舶橫搖、縱搖運(yùn)動(dòng)信號時(shí)間歷程進(jìn)行功率譜分析。圖1為測試工況下橫搖、縱搖運(yùn)動(dòng)功率譜密度,由圖1可知,當(dāng)頻率大于1.5 Hz時(shí),其對應(yīng)功率譜密度近似為零。
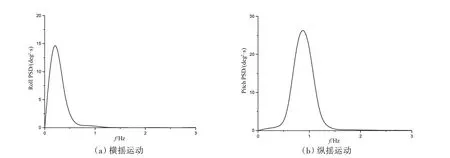
圖1 運(yùn)動(dòng)功率譜密度(浪向135°,V=6 kn)Fig.1 Power spectrum density of roll and pitch motion(wave direction:135°,V=6 kn)
以艏斜浪135°縱搖運(yùn)動(dòng)(航速V=6 kn)數(shù)據(jù)為例,采用db4小波對船舶運(yùn)動(dòng)信號進(jìn)行5層分解,圖2為對應(yīng)5層分解后各層的低頻逼近信號(C1~C5)和高頻細(xì)節(jié)信號(D1~D5)。由圖2可知,隨著分解層數(shù)的增加,細(xì)節(jié)信號逐漸增強(qiáng)。
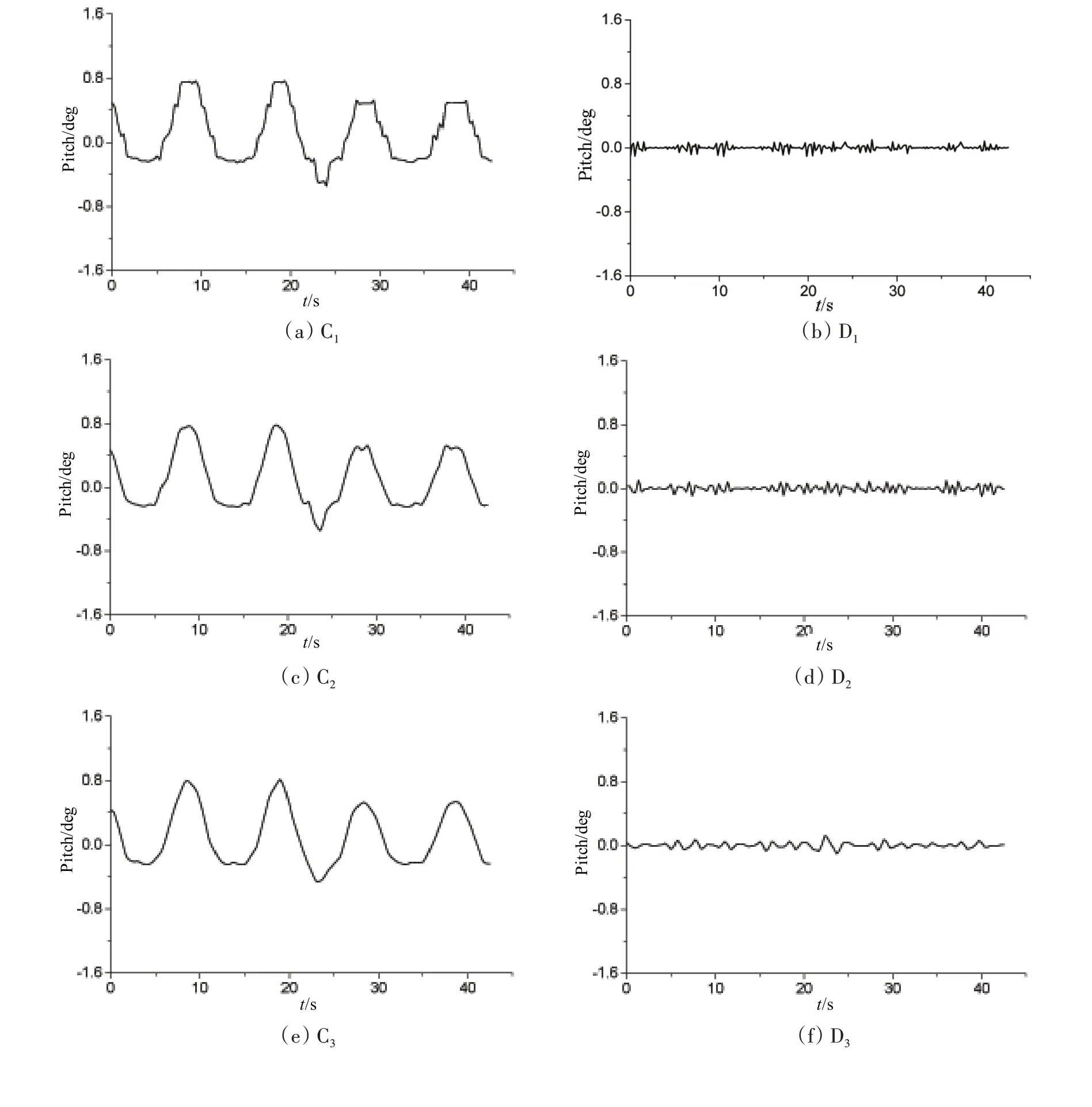
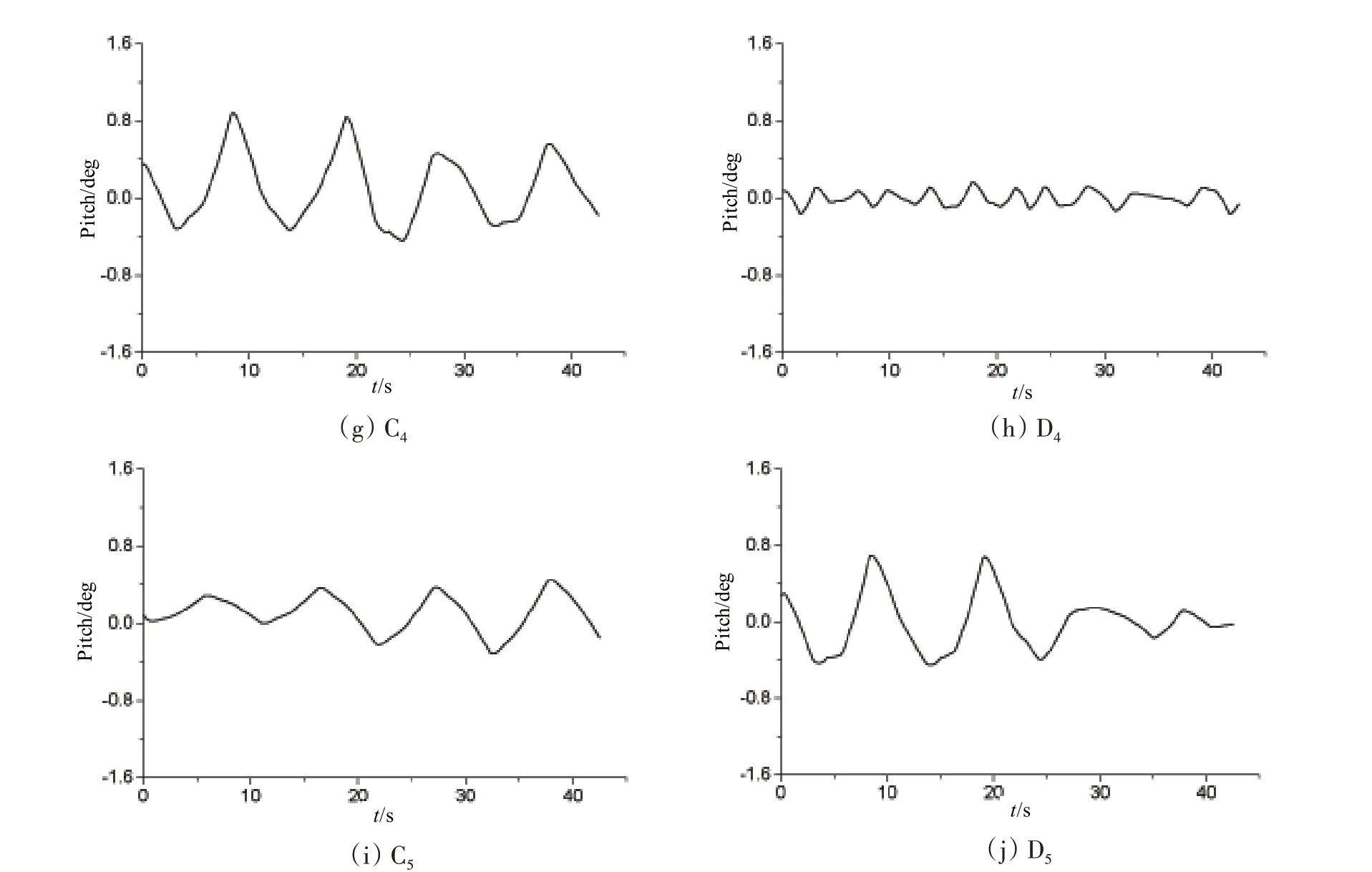
圖2 縱搖運(yùn)動(dòng)db4小波5層分解(浪向135°,V=6 kn)Fig.2 Decomposition of pitch motion with db4 wavelet(wave direction:135°,V=6 kn)
圖3為各層逼近信號與細(xì)節(jié)信號的功率譜估計(jì),由圖3可以看出,隨著分解層數(shù)的增加,細(xì)節(jié)信號功率譜密度峰值逐漸增大,且逐漸向低頻方向移動(dòng)。對于船舶運(yùn)動(dòng)時(shí)歷信號,由于第1~4層細(xì)節(jié)信號主要表現(xiàn)為高頻噪聲,因此可采用硬閾值函數(shù)處理小波系數(shù),閾值選取為0,即強(qiáng)制1~4層細(xì)節(jié)信號為0。
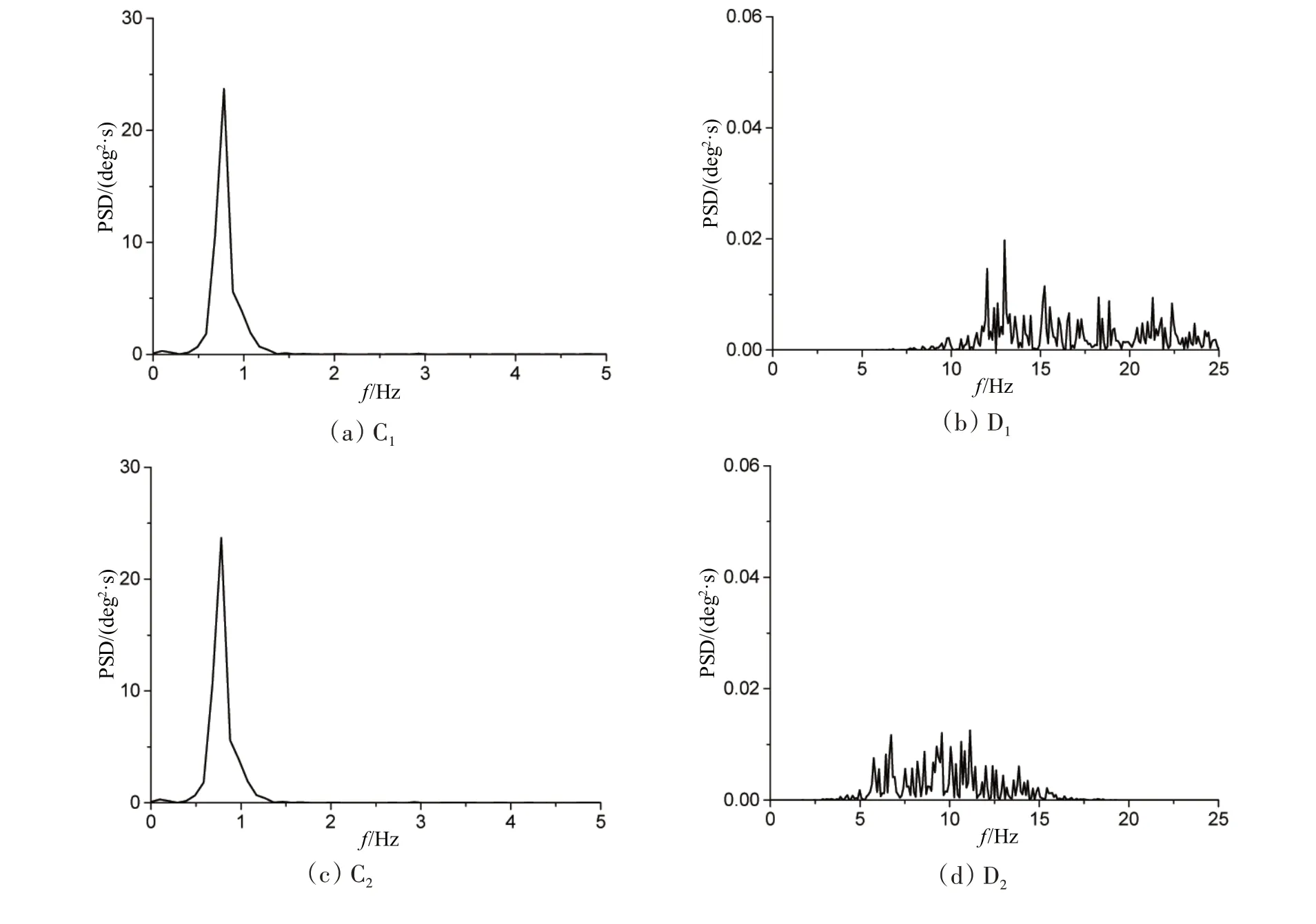
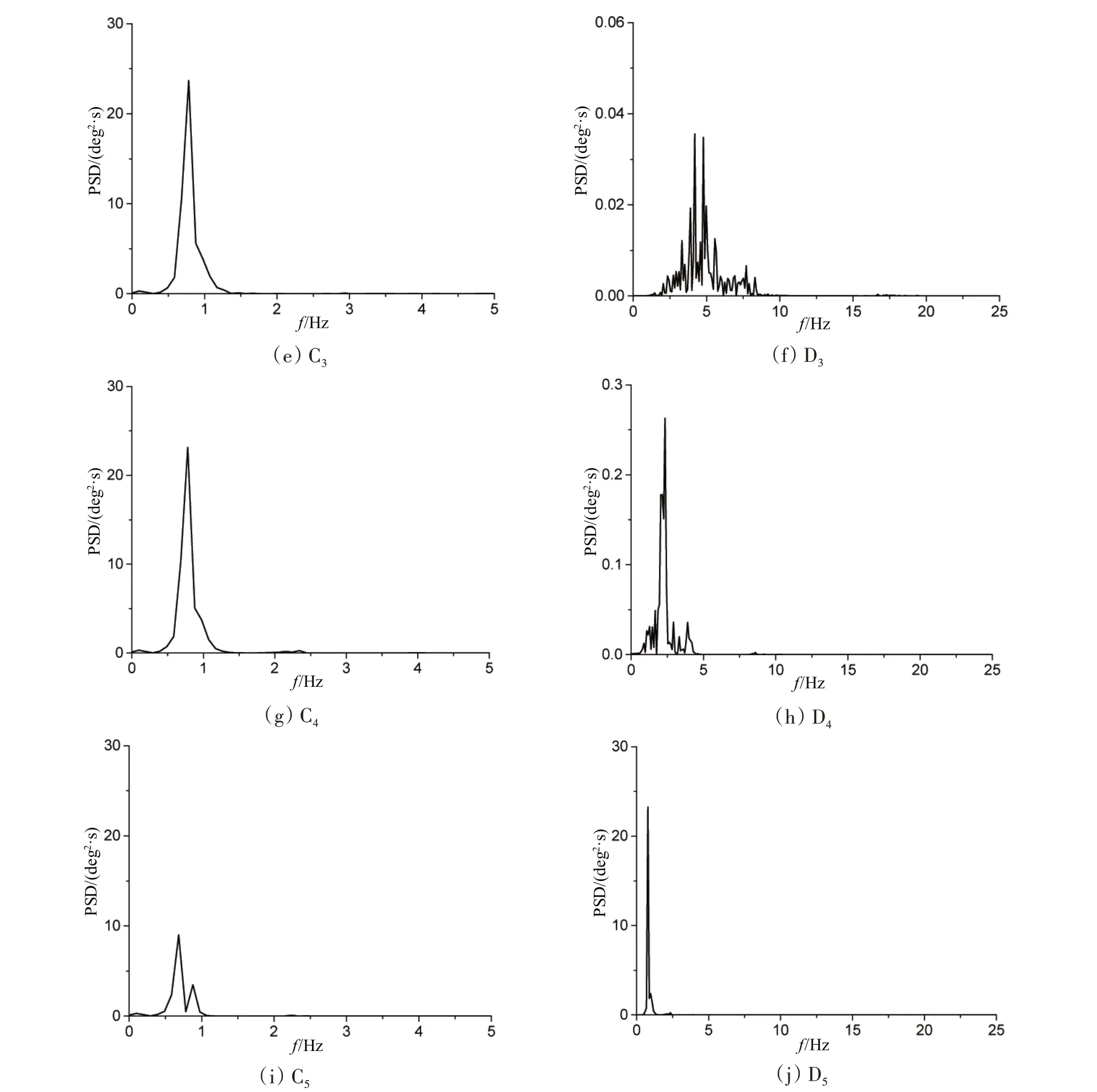
圖3 縱搖運(yùn)動(dòng)db4小波分解信號功率譜(浪向135°,V=6 kn)Fig.3 Power spectrum density of different decomposition levels(wave direction:135°,V=6 kn)
通過對細(xì)節(jié)信號的系數(shù)閾值處理后,分別對分解后的各層逼近信號進(jìn)行重構(gòu),圖4為采用硬閾值處理后重構(gòu)信號與原始數(shù)據(jù)的對比,并與傳統(tǒng)FFT 濾波方法進(jìn)行了比較。由圖4可知,采用db4小波基函數(shù)可有效實(shí)現(xiàn)濾波,且在運(yùn)動(dòng)信號時(shí)歷端點(diǎn)處,仍能逼真地反映原始信號,而傳統(tǒng)FFT 法雖然也可有效實(shí)現(xiàn)濾波,但在端點(diǎn)附近出現(xiàn)突變,使得濾波后端點(diǎn)附近的信號與真實(shí)信號偏差較大。由于在船舶運(yùn)動(dòng)極短期預(yù)報(bào)中需要當(dāng)前時(shí)刻前一段歷史數(shù)據(jù)作為樣本建立模型,當(dāng)前時(shí)刻前一段歷史數(shù)據(jù)的真實(shí)性對所建立的預(yù)報(bào)模型的預(yù)報(bào)精度至關(guān)重要,因此小波濾波可有效提高船舶運(yùn)動(dòng)極短期預(yù)報(bào)模型的精度。
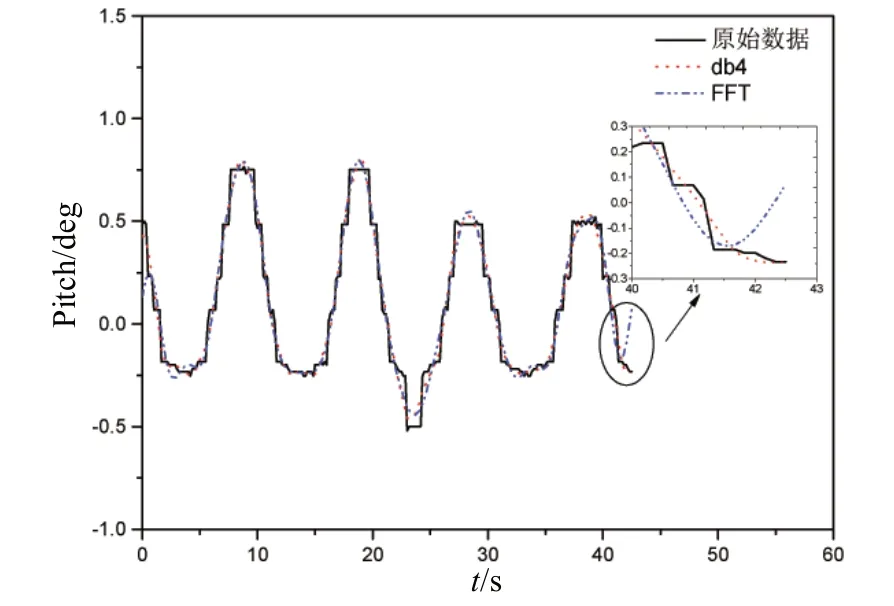
圖4 縱搖運(yùn)動(dòng)濾波對比(浪向135°,V=12 kn)Fig.4 Filtering comparison of pitch motion (wave direction:135°,V=12 kn)
進(jìn)一步采用上述相同的閾值處理方法,表1 為采用dbN(N=2~8)系列、symN(N=2~8)系列小波基函數(shù)濾波效果的統(tǒng)計(jì)結(jié)果。由表1可知,dbN(N=3~8)、symN(N=3~8)系列小波對船舶運(yùn)動(dòng)信號濾波效果相當(dāng)(FFT濾波均方差為0.005 0,信噪比為17.649 5)。
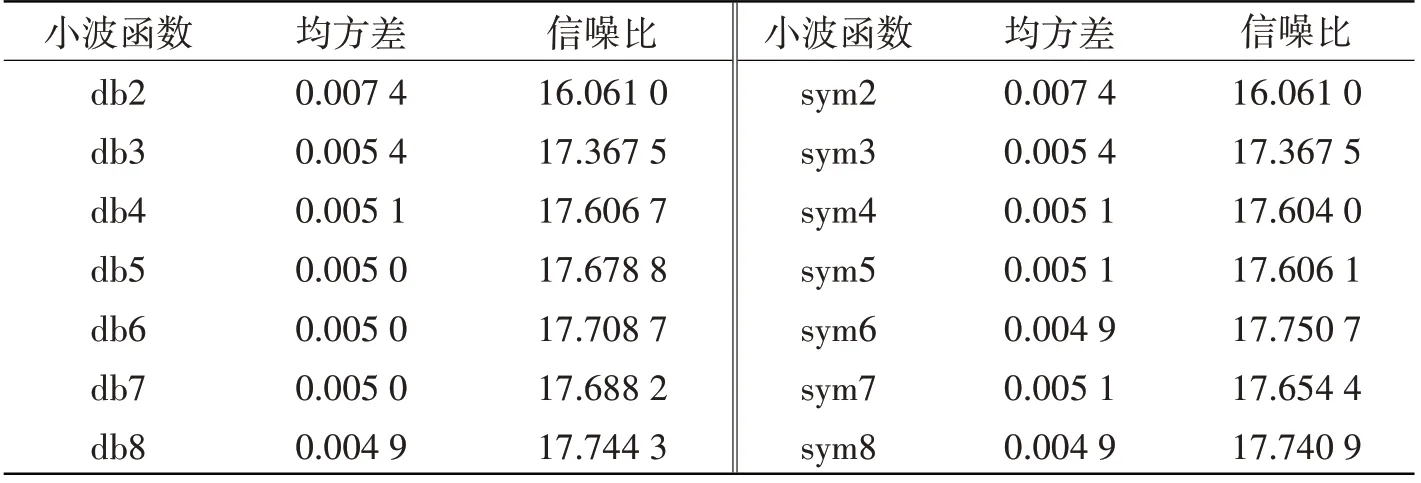
表1 不同小波基函數(shù)均方差統(tǒng)計(jì)結(jié)果Tab.1 Mean square deviation with different wavelet bases
2 LSTM 神經(jīng)網(wǎng)絡(luò)預(yù)報(bào)原理
2.1 LSTM 神經(jīng)網(wǎng)絡(luò)
長短期記憶(LSTM)神經(jīng)網(wǎng)絡(luò)是建立在RNN上的一種新型深度機(jī)器學(xué)習(xí)神經(jīng)網(wǎng)絡(luò),通過在隱藏層各神經(jīng)單元中增加記憶單元,使時(shí)間序列上的記憶信息可控,在輸入、反饋與防止梯度爆炸之間建立了一個(gè)長時(shí)滯,該架構(gòu)強(qiáng)制其在特殊記憶單元的內(nèi)部狀態(tài)保持持續(xù)誤差流,從而使得梯度既不會爆炸也不會消失,其神經(jīng)網(wǎng)絡(luò)單元主要結(jié)構(gòu)如圖5所示。
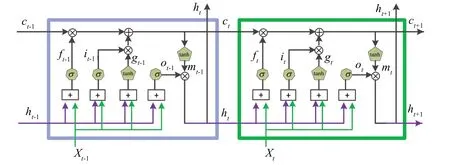
圖5 LSTM神經(jīng)單元結(jié)構(gòu)圖Fig.5 LSTM unit structure
其每層神經(jīng)元設(shè)計(jì)為具有多個(gè)門的結(jié)構(gòu),分別為輸入門、遺忘門和輸出門,具體計(jì)算步驟如下:
(1)輸入門,用來計(jì)算哪些信息保存到狀態(tài)單元中,包含兩部分:一部分作為當(dāng)前輸入信息保存到細(xì)胞狀態(tài)it,另一部分將當(dāng)前輸入產(chǎn)生的新信息添加到細(xì)胞狀態(tài)gt,從而產(chǎn)生新的記憶狀態(tài)ct。

(2)遺忘門,用于計(jì)算信息的遺忘程度,通過sigmoid 處理后為0 或1 的值,0 表示全部忘記,1 表示全部保留。

(3)輸出門,用于計(jì)算當(dāng)前時(shí)刻信息被輸出程度。
2.2 梯度計(jì)算
設(shè)y?i(t)、yi(t)為t時(shí)刻第i個(gè)單元的實(shí)際輸出與目標(biāo)輸出,定義損失函數(shù)E:


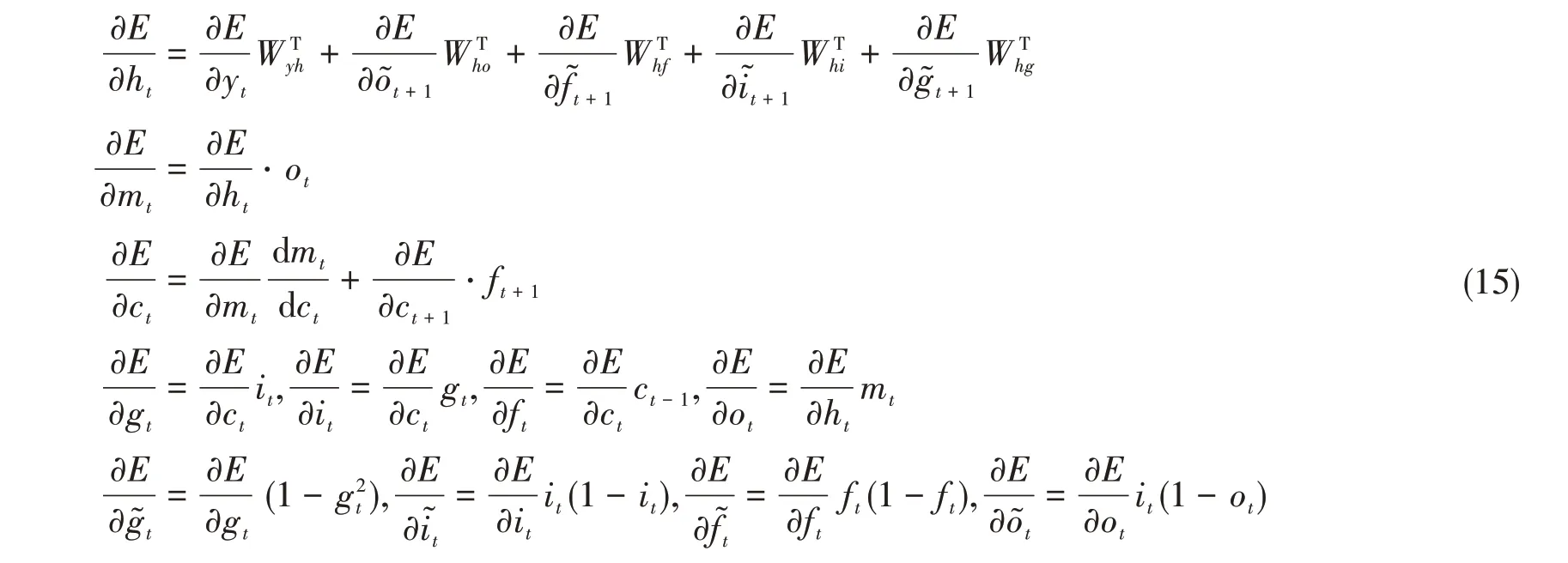
各參數(shù)梯度計(jì)算公式如下:

2.3 LSTM 的船舶運(yùn)動(dòng)極短期預(yù)報(bào)建模流程
對于船舶運(yùn)動(dòng)時(shí)間序列{x(t),t = 1,2,…,N},對應(yīng)輸入向量為X(t - 1),構(gòu)造訓(xùn)練樣本集,其中,X(t - 1) =[x(t - 1),x(t - 2),…,x(t - n)]T,期望輸出為x(t + L)(L=1,2…為預(yù)報(bào)步數(shù))。采用反向傳播法對LSTM網(wǎng)絡(luò)結(jié)構(gòu)各節(jié)點(diǎn)和參數(shù)求解,其步驟如下:
(1)對各參數(shù)進(jìn)行初始化,前向計(jì)算每個(gè)神經(jīng)元的輸出值;
(2)反向計(jì)算每個(gè)神經(jīng)元的誤差項(xiàng)、誤差函數(shù)E對神經(jīng)元j的加權(quán)輸入的偏導(dǎo)數(shù);
(3)計(jì)算每個(gè)權(quán)重的梯度,并對參數(shù)進(jìn)行更新;
(4)重復(fù)步驟(2)、(3),直到擬合回歸模型誤差滿足精度要求,利用該模型進(jìn)行未來時(shí)刻預(yù)報(bào)。
3 實(shí)例預(yù)報(bào)與分析
為了驗(yàn)證預(yù)報(bào)模型的有效性,本文采用某船耐波性模型試驗(yàn)數(shù)據(jù)進(jìn)行建模預(yù)報(bào),試驗(yàn)工況如表2所示。

表2 試驗(yàn)工況Tab.2 Test conditions
利用小波濾波和LSTM 相結(jié)合的預(yù)報(bào)模型對表2中不同工況下的運(yùn)動(dòng)進(jìn)行預(yù)報(bào),模型訓(xùn)練數(shù)據(jù)個(gè)數(shù)為500,預(yù)報(bào)時(shí)間為1~15 s,連續(xù)預(yù)報(bào)次數(shù)為500次,并對預(yù)報(bào)精度(EPA)進(jìn)行統(tǒng)計(jì)分析。

式中:EPA表示預(yù)報(bào)精度;n為預(yù)報(bào)的數(shù)據(jù)個(gè)數(shù);x(t)、x?(t)分別為t時(shí)刻的真實(shí)值與預(yù)報(bào)值;x?m(t)、xm(t)分別為n個(gè)預(yù)報(bào)值和實(shí)測值的平均期望;σx?、σx分別代表預(yù)報(bào)和期望的標(biāo)準(zhǔn)差。EPA反映了預(yù)報(bào)曲線與真實(shí)曲線之間的形狀相似程度。EPA越接近1,表明預(yù)報(bào)曲線與實(shí)測數(shù)據(jù)曲線相似程度越高。
圖6 為浪向180°、航速6 kn 工況下縱搖和垂蕩運(yùn)動(dòng)預(yù)報(bào)精度隨預(yù)報(bào)時(shí)間的關(guān)系,由圖可以看出,隨著預(yù)報(bào)時(shí)間的增長,預(yù)報(bào)精度逐漸下降。對于該工況下不同預(yù)報(bào)時(shí)間的縱搖運(yùn)動(dòng)預(yù)報(bào)精度要高于垂蕩運(yùn)動(dòng),縱搖運(yùn)動(dòng)預(yù)報(bào)時(shí)間為11 s 時(shí)預(yù)報(bào)精度仍滿足0.85 以上,之后隨著預(yù)報(bào)時(shí)間增長,下降速度明顯加快。對于該工況下垂蕩運(yùn)動(dòng)預(yù)報(bào)在預(yù)報(bào)精度大于0.85時(shí),預(yù)報(bào)時(shí)間可達(dá)8 s。
圖7 為浪向180°、航速6 kn 工況下縱搖運(yùn)動(dòng)超前4 s 和8 s 時(shí)的預(yù)報(bào)與試驗(yàn)結(jié)果對比,由圖中可以看出,超前預(yù)報(bào)4 s 時(shí),預(yù)報(bào)結(jié)果與試驗(yàn)結(jié)果在相位及峰值上都吻合較好;超前預(yù)報(bào)8 s 時(shí),在峰(谷)值較大的時(shí)刻,無明顯相位誤差,預(yù)報(bào)結(jié)果與試驗(yàn)結(jié)果峰值誤差變大。
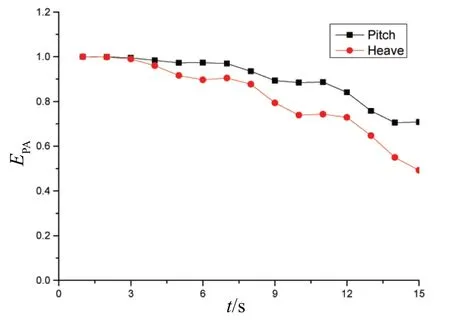
圖6 縱搖、垂蕩運(yùn)動(dòng)不同預(yù)報(bào)時(shí)間對應(yīng)的預(yù)報(bào)精度(浪向180o,V=6 kn)Fig.6 Pitch and heave prediction precision versus prediction time(wave direction:180°,V=6 kn)
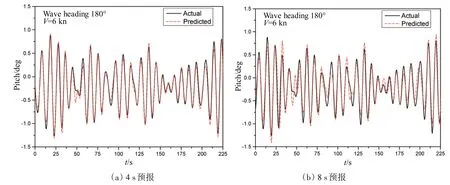
圖7 縱搖運(yùn)動(dòng)預(yù)報(bào)結(jié)果(浪向180o,V=6 kn)Fig.7 Pitch motion prediction(wave direction:180°,V=6 kn)
進(jìn)一步對浪向180°、航速12 kn 工況下縱搖和垂蕩運(yùn)動(dòng),浪向135°、航速6 kn 工況下的橫搖、縱搖和垂蕩運(yùn)動(dòng)開展了極短期預(yù)報(bào)研究。圖8 和圖9 分別為兩個(gè)工況下不同運(yùn)動(dòng)預(yù)報(bào)精度隨預(yù)報(bào)時(shí)間的變化曲線。結(jié)果表明,隨著預(yù)報(bào)時(shí)間的增加,縱搖運(yùn)動(dòng)預(yù)報(bào)精度均高于橫搖和垂蕩運(yùn)動(dòng)的預(yù)報(bào)精度。浪向180°、航速12 kn工況下,在滿足預(yù)報(bào)精度EPA大于0.85時(shí),縱搖運(yùn)動(dòng)預(yù)報(bào)時(shí)間可達(dá)11 s,垂蕩運(yùn)動(dòng)預(yù)報(bào)時(shí)間可達(dá)9 s;浪向135°、航速6 kn 工況下,預(yù)報(bào)精度EPA大于0.85 時(shí),橫搖運(yùn)動(dòng)預(yù)報(bào)時(shí)間可達(dá)8 s,縱搖運(yùn)動(dòng)預(yù)報(bào)時(shí)間可達(dá)14 s,垂蕩運(yùn)動(dòng)預(yù)報(bào)時(shí)間可達(dá)11 s。
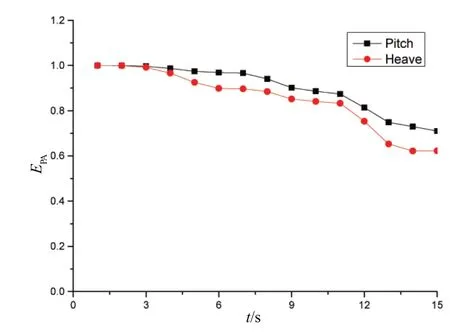
圖8 縱搖、垂蕩運(yùn)動(dòng)預(yù)報(bào)精度(浪向180o,V=12 kn)Fig.8 Pitch and heave prediction precision vs. prediction time(wave direction:180°,V=12 kn)
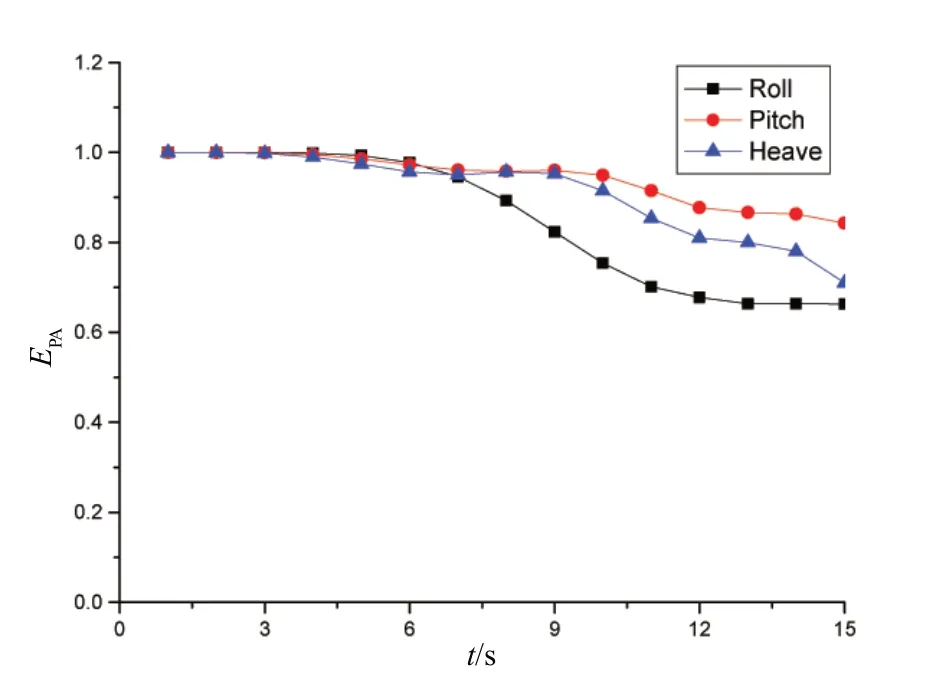
圖9 橫搖、縱搖和垂蕩運(yùn)動(dòng)預(yù)報(bào)精度(浪向135o,V=6 kn)Fig.9 Roll,pitch and heave prediction precision vs.prediction time(wave direction:135°,V=6 kn)
圖10~14 分別為浪向180°、航速12 kn 工況下縱搖和垂蕩運(yùn)動(dòng),浪向135°、航速6 kn 工況下的橫搖、縱搖及垂蕩運(yùn)超前4 s和8 s時(shí)的預(yù)報(bào)結(jié)果與試驗(yàn)結(jié)果對比。結(jié)果表明,超前預(yù)報(bào)4 s時(shí),兩個(gè)工況下運(yùn)動(dòng)預(yù)報(bào)結(jié)果與試驗(yàn)結(jié)果具有較好的相似度,且相位與峰值無明顯差別;超前預(yù)報(bào)8 s時(shí),預(yù)報(bào)結(jié)果峰值與試驗(yàn)結(jié)果峰值誤差變大,但相位均吻合較好。
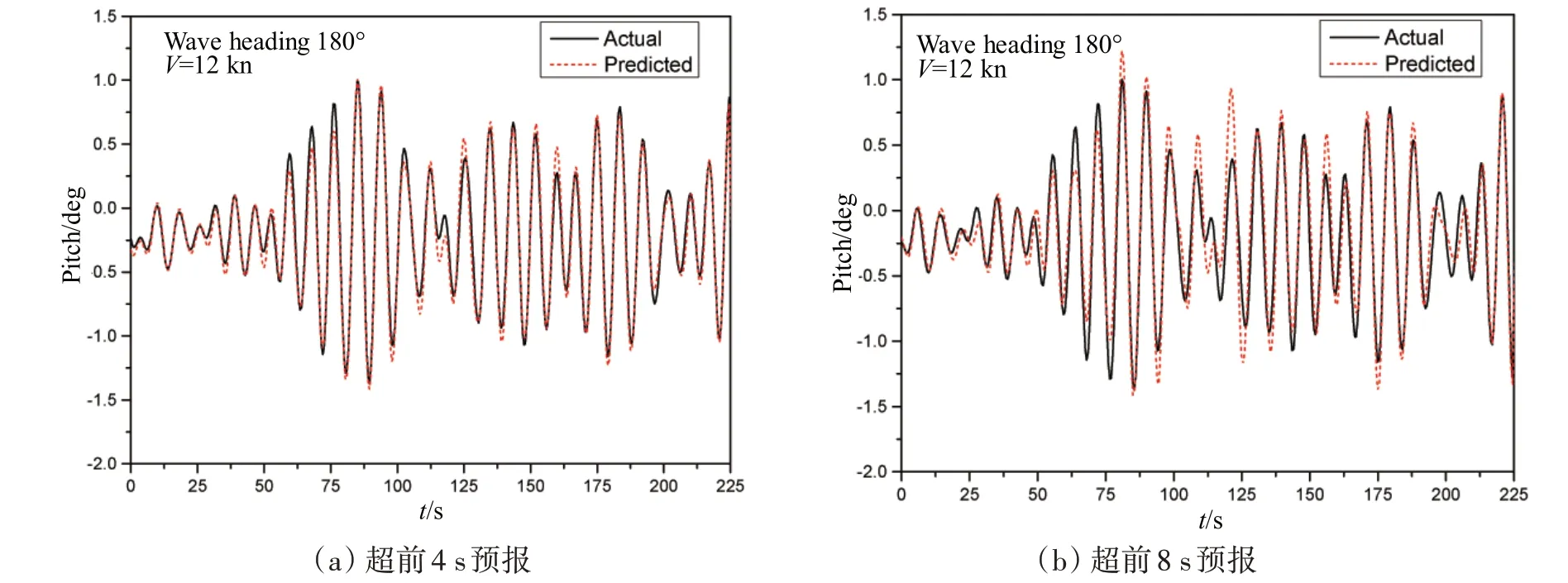
圖10 縱搖運(yùn)動(dòng)預(yù)報(bào)結(jié)果(浪向180o,V=12 kn)Fig.10 Pitch motion prediction(wave direction:180°,V=12 kn)
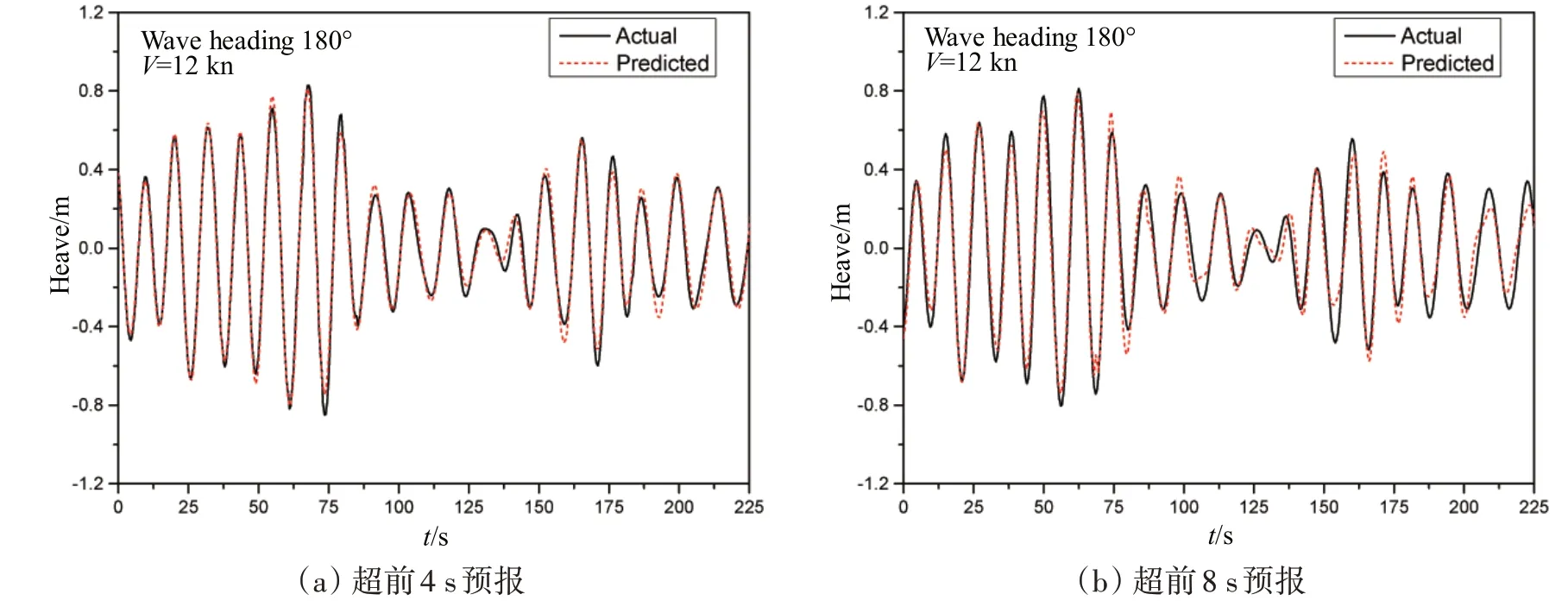
圖11 垂蕩運(yùn)動(dòng)預(yù)報(bào)結(jié)果(浪向180o,V=12 kn)Fig.11 Heave motion prediction(wave direction:180°,V=12 kn)
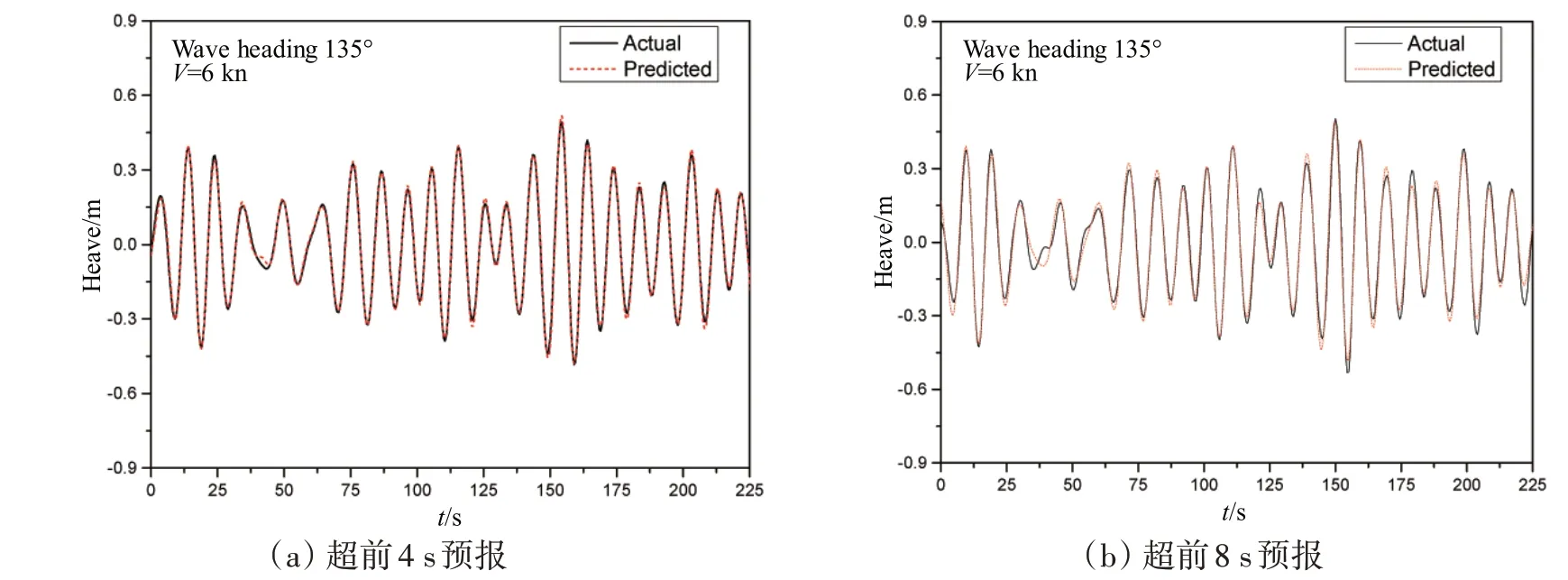
圖12 垂蕩運(yùn)動(dòng)預(yù)報(bào)結(jié)果(浪向135°,V=6 kn)Fig.12 Heave motion prediction(wave direction:135°,V=6 kn)
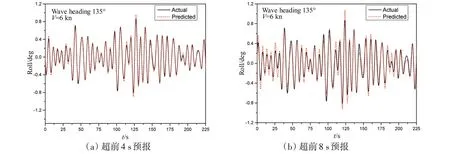
圖13 橫搖運(yùn)動(dòng)預(yù)報(bào)結(jié)果(浪向135°,V=6 kn)Fig.13 Roll motion prediction(wave direction:135°,V=6 kn)
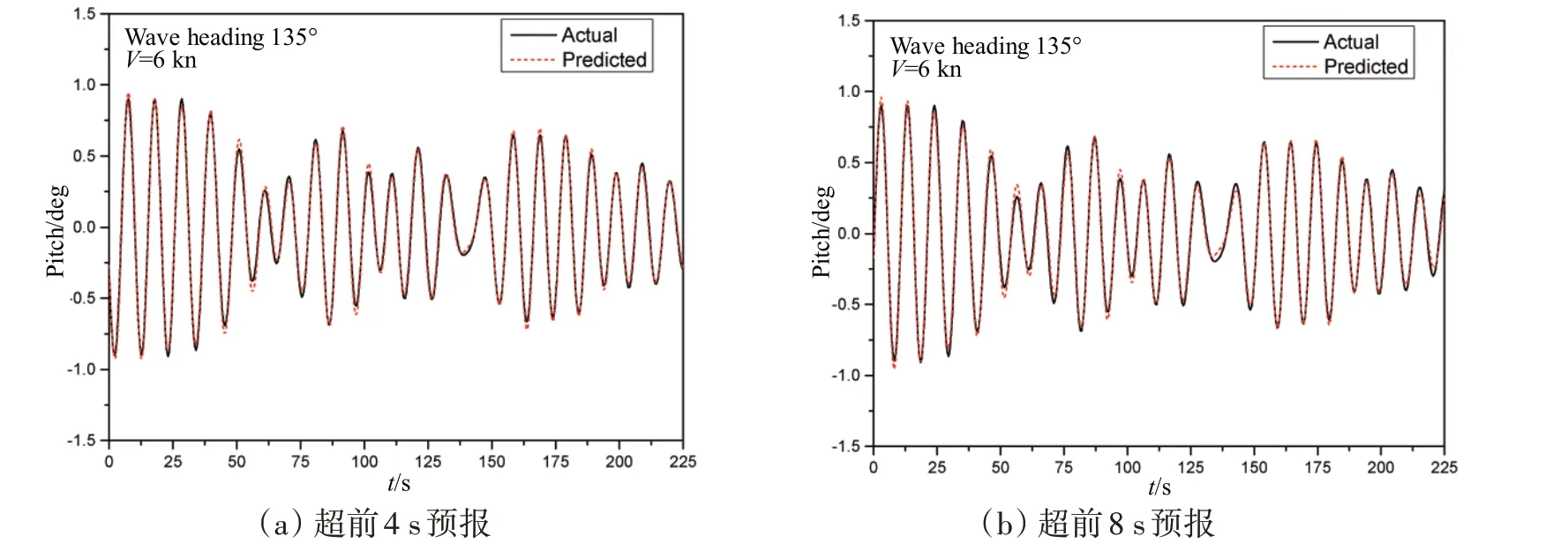
圖14 縱搖運(yùn)動(dòng)預(yù)報(bào)結(jié)果(浪向135°,V=6 kn)Fig.14 Pitch motion prediction(wave direction:135°,V=6 kn)
4 結(jié) 論
本文針對船舶運(yùn)動(dòng)的非線性特性及測量噪聲對預(yù)報(bào)精度的影響,建立了基于小波多分辨率分析的濾波方法,有效實(shí)現(xiàn)了船舶運(yùn)動(dòng)的濾波,并建立了基于LSTM 神經(jīng)網(wǎng)絡(luò)的多步直接映射船舶運(yùn)動(dòng)極短期預(yù)報(bào)模型,通過耐波性試驗(yàn)數(shù)據(jù)對濾波方法和預(yù)報(bào)模型性能進(jìn)行了驗(yàn)證分析,得到了如下主要結(jié)論:
(1)通過對小波濾波算法中小波基、閾值處理以及尺度函數(shù)的分析,確定了dbN(N=3~8)系列、symN(N=3~8)系列小波基函數(shù)、分解層數(shù)5 層和1~4 層細(xì)節(jié)信號硬閾值處理方法,可有效去除船舶運(yùn)動(dòng)信號中的高頻噪聲,解決了傳統(tǒng)FFT濾波方法對當(dāng)前時(shí)刻數(shù)據(jù)處理引起的端點(diǎn)突變問題,可有效提高船舶運(yùn)動(dòng)極短期預(yù)報(bào)建模的魯棒性;
(2)通過不同航速、不同浪向下的預(yù)報(bào)結(jié)果與試驗(yàn)數(shù)據(jù)的對比分析,驗(yàn)證了所建立的基于LSTM神經(jīng)網(wǎng)絡(luò)的預(yù)報(bào)模型可有效實(shí)現(xiàn)船舶運(yùn)動(dòng)歷史信息與未來時(shí)刻的非線性映射,橫搖、縱搖和垂蕩運(yùn)動(dòng)預(yù)報(bào)幅值和相位均取得了令人滿意的精度,縱搖運(yùn)動(dòng)預(yù)報(bào)時(shí)間可達(dá)10 s,橫搖和垂蕩運(yùn)動(dòng)可達(dá)8 s以上。
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
艦船科學(xué)技術(shù)(2022年2期)2022-03-29 01:12:44
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價(jià)·高一版(2020年6期)2020-11-02 02:45:24
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
船舶標(biāo)準(zhǔn)化工程師(2019年4期)2019-07-24 07:21:12
中國生殖健康(2019年3期)2019-02-01 06:12:26
中國船檢(2017年3期)2017-05-18 11:33:09
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00