基于位置姿勢(shì)控制的并聯(lián)機(jī)械手運(yùn)動(dòng)誤差仿真分析*
2021-03-26 05:43:32朱向楠韋源源
組合機(jī)床與自動(dòng)化加工技術(shù) 2021年3期
朱向楠,韋源源
(1.揚(yáng)州工業(yè)職業(yè)技術(shù)學(xué)院智能制造學(xué)院,江蘇 揚(yáng)州 225127; 2.揚(yáng)州大學(xué)機(jī)械工程學(xué)院,江蘇 揚(yáng)州 225000)
0 引言
機(jī)械手是可以替代人類勞動(dòng)進(jìn)行自動(dòng)化生產(chǎn)的機(jī)器,不僅使企業(yè)的生產(chǎn)總量發(fā)生了根本性變化,而且對(duì)人類的生活也產(chǎn)生了重大的影響。機(jī)械手具有生產(chǎn)效率高、成本低及承載力大等許多優(yōu)點(diǎn),廣泛用于煤礦開(kāi)采、汽車生產(chǎn)、海底探測(cè)和醫(yī)療手術(shù)等許多領(lǐng)域[1-2]。機(jī)械手技術(shù)的先進(jìn)程度主要體現(xiàn)在控制系統(tǒng)性能上,因此,機(jī)械手的發(fā)展歷史就是控制系統(tǒng)的發(fā)展歷史。國(guó)內(nèi)機(jī)械手控制系統(tǒng)近幾年得到了迅速的發(fā)展,有些學(xué)者對(duì)當(dāng)前的先進(jìn)機(jī)械手進(jìn)行了研究和探討,為今后的研究奠定了理論基礎(chǔ)。但是,當(dāng)前的機(jī)械手控制理論的關(guān)鍵問(wèn)題研究的還很初淺,核心技術(shù)需要更深入的研究。
為了降低并聯(lián)機(jī)械手控制系統(tǒng)輸出誤差,許多學(xué)者對(duì)其控制系統(tǒng)展開(kāi)研究。文獻(xiàn)[3-4]研究了并聯(lián)機(jī)械手控制系統(tǒng)的優(yōu)化方法,采用遺傳算法對(duì)并聯(lián)機(jī)械手關(guān)節(jié)力矩進(jìn)行優(yōu)化,通過(guò)MATLAB軟件對(duì)致動(dòng)力矩進(jìn)行仿真,從而降低并聯(lián)機(jī)械手致動(dòng)力矩。文獻(xiàn)[5-6]研究了車載機(jī)械手PLC控制系統(tǒng),分析了控制系統(tǒng)的硬件和軟件,設(shè)計(jì)了四自由度車載機(jī)械手控制系統(tǒng),具有較高的應(yīng)用價(jià)值。文獻(xiàn)[7-8]研究了并聯(lián)機(jī)器人結(jié)構(gòu)設(shè)計(jì)與控制,推導(dǎo)出機(jī)械手奇異位置和速度變化方程式,通過(guò)實(shí)驗(yàn)驗(yàn)證機(jī)械手軌跡跟蹤效果,提高軌跡跟蹤精度。但是,以前研究的并聯(lián)機(jī)械手在受到外部載荷影響時(shí),其位置姿勢(shì)跟蹤誤差就會(huì)增大,從而影響并聯(lián)機(jī)械手生產(chǎn)精度。
本文建立了并聯(lián)機(jī)械手運(yùn)動(dòng)簡(jiǎn)圖,推導(dǎo)出并聯(lián)機(jī)械手位置姿勢(shì)變化方程式。引用模糊PID控制器,采用前饋補(bǔ)償原理對(duì)模糊PID控制器進(jìn)行改進(jìn),通過(guò)仿真驗(yàn)證改進(jìn)后的控制系統(tǒng)輸出誤差,為提高并聯(lián)機(jī)械手控制系統(tǒng)跟蹤精度提供理論參考價(jià)值。
1 并聯(lián)機(jī)器人數(shù)學(xué)模型
1.1 機(jī)械手運(yùn)動(dòng)學(xué)建模
本文研究的是二自由度并聯(lián)機(jī)械手模型如圖1所示。機(jī)械手由矩形板、液壓缸為圓柱接頭(CJ)、回轉(zhuǎn)接頭(RJ)、球形接頭(SJ)、比例閥(PV)、線性可變差動(dòng)傳感器(LVDT)、齒輪泵(P)、電動(dòng)機(jī)、減壓閥、液壓動(dòng)力組件、液壓過(guò)濾器等組成。機(jī)械手的頂板尺寸為L(zhǎng)×B,它通過(guò)RJ和SJ連接到液壓缸的活塞上,RJ軸與SJ之間的距離為L(zhǎng)。液壓活塞缸系統(tǒng)的圓柱接頭1,圓柱接頭2分別定義為CJ1和CJ2。圓柱接頭CJ1和CJ2的移動(dòng)可分別通過(guò)彈簧中心電磁閥操作的比例閥1(PV1)和比例閥2(PV2)的滑閥移動(dòng)來(lái)控制。比例閥PV1、PV2的閥芯運(yùn)動(dòng)可以通過(guò)來(lái)自控制器的指令電壓信號(hào)e=[e1e2]T來(lái)控制。CJ的相對(duì)運(yùn)動(dòng)方向通過(guò)LVDT反饋信號(hào)決定的。
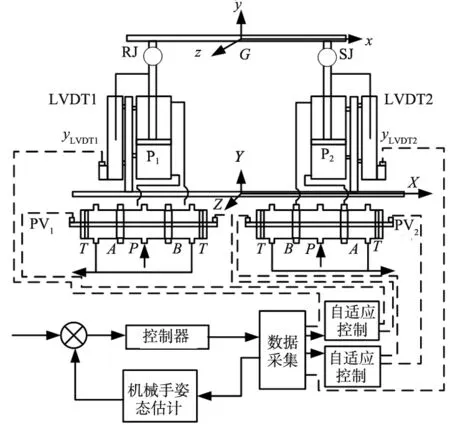
圖1 液壓驅(qū)動(dòng)并聯(lián)機(jī)械手簡(jiǎn)圖
二自由度并聯(lián)機(jī)械手的運(yùn)動(dòng)學(xué)圖如圖2所示。在并聯(lián)機(jī)器人的底座上,將固定坐標(biāo)系定義為O-XYZ,將機(jī)械手頂板坐標(biāo)系定義為G-xyz。在不同時(shí)刻,由于起伏和俯仰運(yùn)動(dòng),并聯(lián)機(jī)械手新的位置也在改變。通過(guò)運(yùn)動(dòng)定義的G′-x′y′z′坐標(biāo)系,從而得到頂板重心的新位置。在俯仰運(yùn)動(dòng)后,獲得板RJ″和SJ″的最終方向,并獲得相應(yīng)的末端執(zhí)行器擬合坐標(biāo)系x″y″z″。
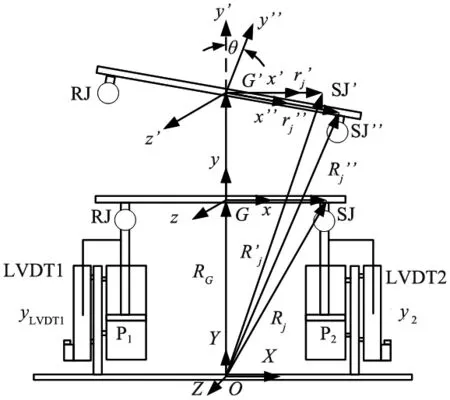
圖2 并聯(lián)機(jī)械手運(yùn)動(dòng)圖
末端執(zhí)行器關(guān)節(jié)Rj的位置矢量[9]可以表示為:
Rj=RG+rj
(1)
(2)
式中,RG為機(jī)械手頂板重心矢量位置;rj為機(jī)械手關(guān)節(jié)相對(duì)于xyz坐標(biāo)系的位置矢量。
機(jī)械手在SJ處的位移與升沉和俯仰運(yùn)動(dòng)相關(guān),其變化關(guān)系式為:
ΔRj=ΔRG+Δrj
(3)
(4)
式中,ΔRj=Rj″-Rj;ΔRG=RG″-RG;Δrj=rj″-rj。
末端執(zhí)行器關(guān)節(jié)速度可以表示為:
(5)
式中,ωp為末端執(zhí)行器頂板的角速度。
末端執(zhí)行器關(guān)節(jié)加速度可以表示為:
(6)
式中,αp為末端執(zhí)行器頂板的角加速度。
垂直固定雙作用單桿液壓缸立柱為二自由度并聯(lián)機(jī)械手。液壓并聯(lián)機(jī)械手的腿為圓柱關(guān)節(jié)。并聯(lián)機(jī)械手的腿液壓執(zhí)行機(jī)構(gòu)系統(tǒng)的動(dòng)力學(xué)模型可以表示為:
(7)
(8)
式中,yi、vi和ai分別為機(jī)械手第i腿運(yùn)動(dòng)位移,速度和加速度。
由于機(jī)械手的腿被設(shè)置為剛性,并聯(lián)機(jī)械手的垂蕩和俯仰運(yùn)動(dòng)可以通過(guò)圓柱關(guān)節(jié)活塞的運(yùn)動(dòng)表示為:
(9)

(10)
式中,h為垂蕩位移;θr為執(zhí)行器的俯仰角。
垂蕩速度和加速度可以表示為:
(11)
(12)
頂板的角速度和角加速度可以表示為:
(13)
(14)
末端執(zhí)行器可以自由移動(dòng)的區(qū)域?yàn)闄C(jī)械手的工作空間。執(zhí)行器的升沉和俯仰極限可由機(jī)械手腿的圓柱關(guān)節(jié)運(yùn)動(dòng)的最大和最小測(cè)量值來(lái)估計(jì),YLVDT1和YLVDT2分別為腿1和2與機(jī)械手腿的圓柱關(guān)節(jié)的軸之間的距離。
1.2 機(jī)械手動(dòng)力學(xué)建模
根據(jù)牛頓-歐拉方法[10]可知,廣義的動(dòng)力方程可以寫成:

(15)
式中,M、N、G和q分別為慣性質(zhì)量、離心科里奧利力和摩擦力、重力矩陣和位置矢量。
機(jī)械手各支腿的動(dòng)力學(xué)方程可以寫成:

(16)
Fji=Ffi+Ffpi
(17)
式中,F(xiàn)ji為關(guān)節(jié)摩擦力;Ffi為圓柱關(guān)節(jié)摩擦力;Ffp為旋轉(zhuǎn)關(guān)節(jié)摩擦力或球形關(guān)節(jié)摩擦力。
機(jī)械手頂板的慣性力和外部載荷定義為:
FI=FIr+FIl
(18)
(19)
(20)
(21)

在本系統(tǒng)中,機(jī)械手的運(yùn)動(dòng)由液壓缸活塞的運(yùn)動(dòng)獲得。液壓缸的壓力動(dòng)力學(xué)方程可以寫成:
(22)
(23)
式中,P1i和P2i分別為氣缸室1和2中的壓力;Aa1i和Aa2i分別為活塞有桿端和無(wú)桿端面積;β為油的體積模量;V10i和V20i分別為1和2液壓缸的初始容積;Q1i和Q2i分別為1和2液壓缸的流量。
閥門流量與電磁閥激勵(lì)電壓之間關(guān)系式為:

(24)
式中,Cl為泄露系數(shù);Cv1、Cv2為閥門主流量系數(shù)。
機(jī)械手旋轉(zhuǎn)關(guān)節(jié)或銷關(guān)節(jié)的法向力:
(25)
其中,

(26)
δ=0.01×(1-cosθ)L/2
(27)
(28)
式中,F(xiàn)N為法向力;d1和d2為不同球形的直徑;vk為不同接頭金屬硬度比;Ek為楊氏模量。
關(guān)節(jié)接觸的合力表達(dá)式為:
Ffp=Ffjsinθ+FNcosθ
(29)
式中,F(xiàn)fp為關(guān)節(jié)接觸的合力;Ffj為活塞運(yùn)動(dòng)摩擦力;FN為活塞垂直方向的力。
2 控制器設(shè)計(jì)
2.1 模糊PID控制
傳統(tǒng)模糊PID控制過(guò)程如圖3所示。
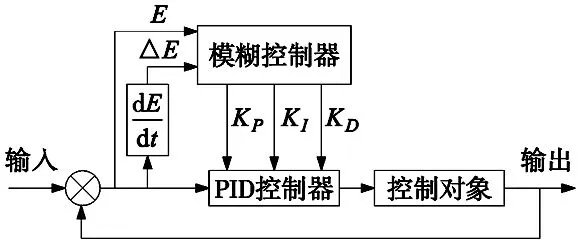
圖3 模糊PID控制
根據(jù)輸入輸出誤差和誤差變化率,對(duì)PID控制器參數(shù)KP、KI、KD進(jìn)行調(diào)整,使模糊集的論域都能涉及到各個(gè)參數(shù)變量。模糊集的輸入和輸出量的論域定義如下:E的范圍為[-1,1],ΔE的范圍為[-35,35],KP的范圍為[12,12],KI的范圍為[-4,4],KD的范圍為[-0.1,0.1]。為了使模糊控制精度達(dá)到最優(yōu),將模糊子集定義為7個(gè)語(yǔ)言值,分別為:①負(fù)大(NB);②負(fù)中(NM);③負(fù)小(NS);④零(ZO);⑤正小(PS);⑥正中(PM);⑦正大(PB)。通過(guò)模糊集的7個(gè)語(yǔ)言值調(diào)節(jié)PID控制器輸出誤差。
PID控制調(diào)整參數(shù)[11]定義為:

(30)
式中,KP(k)、KI(k) 、KD(k)分別為當(dāng)前PID控制器的比例、積分和微分控制參數(shù);KP0(k-1)、KI0(k-1) 、KD0(k-1)分別為前一刻PID控制器的比例、積分和微分控制參數(shù);ΔKP(k)、ΔKI(k) 、ΔKD(k)為模糊控制器的輸出控制參數(shù)。
2.2 前饋補(bǔ)償原理
采用前饋補(bǔ)償方法可以有效地降低控制系統(tǒng)穩(wěn)態(tài)誤差,對(duì)外界環(huán)境的變化起到抑制作用,其補(bǔ)償控制原理如圖4所示。
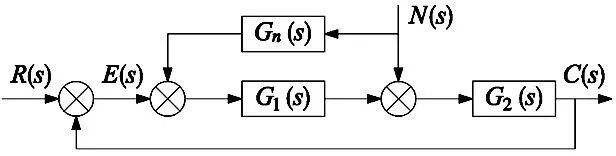
圖4 前饋補(bǔ)償簡(jiǎn)圖
在圖4中,N(s)為外界環(huán)境所干擾的力矩,G1(s)、G2(s)為傳遞函數(shù),Gn(s)為補(bǔ)償函數(shù),通過(guò)合理的設(shè)計(jì)Gn(s),使其對(duì)輸出函數(shù)進(jìn)行補(bǔ)償,從而抑制外界環(huán)境的干擾對(duì)C(s)的影響。
根據(jù)補(bǔ)償控制原理[12]分析可知:外界環(huán)境干擾產(chǎn)生的誤差變化方程式為:
(31)
隨著模糊PID控制參數(shù)的變化,Gn(s)也隨著改變。定義PID控制器速度調(diào)節(jié)傳遞函數(shù)表達(dá)式為:
(32)
因此,可以推導(dǎo)出Gn(s)傳遞函數(shù)表達(dá)式為:

(33)
2.3 模糊前饋PID控制器
本文將自校正前饋模糊PID控制器應(yīng)用于液壓驅(qū)動(dòng)并聯(lián)機(jī)械手的位姿控制,機(jī)械手的姿態(tài)要求、響應(yīng)和誤差可以表示為:
(34)
通過(guò)模糊邏輯來(lái)估計(jì)PID控制器增益,總電壓e可以表示為矩陣形式如下:
(35)
式中,eff為前饋電壓;eb為偏壓;efp為模糊整定PID電壓。
電壓信號(hào)定義為:

(36)

(37)
二自由度并聯(lián)機(jī)械手采用模糊前饋PID控制流程如圖5所示。
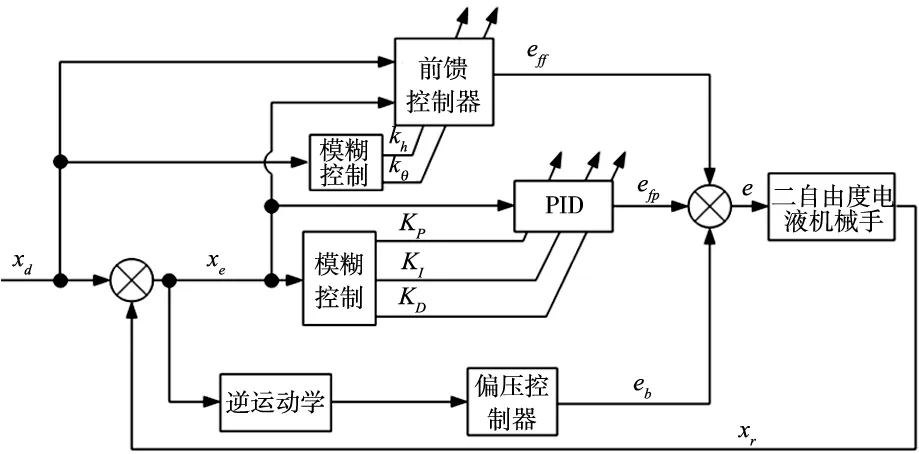
圖5 機(jī)械手模糊前饋PID控制流程
3 運(yùn)動(dòng)仿真
為了比較并聯(lián)機(jī)械手運(yùn)動(dòng)誤差跟蹤效果,采用MATLAB軟件對(duì)機(jī)械手運(yùn)動(dòng)位移和角位移跟蹤進(jìn)行仿真。假設(shè)機(jī)械手期望運(yùn)動(dòng)位移和角位移分別如圖6、圖7所示。仿真參數(shù)設(shè)置如下:頂板長(zhǎng)度L=0.6 m,頂板寬度B=0.3 m,頂板質(zhì)量mp=100 kg,無(wú)桿腔活塞面積Aa1i=1.25×10-3m2,有桿腔活塞面積Aa2i=9.42×10-4m2,活塞質(zhì)量mai=1.5 kg,油體積模量β=1.4×109Pa,無(wú)桿腔初始容積V10i=1.25×10-4m3,有桿腔初始容積V20i=9.42×10-4m3。在外部載荷50 kg干擾下,采用模糊PID控制和模糊前饋PID控制輸出的誤差分別如圖8和圖9所示。在外部載荷100 kg干擾下,采用模糊PID控制和模糊前饋PID控制輸出的誤差分別如圖10和圖11所示。在外部載荷150 kg干擾下,采用模糊PID控制和模糊前饋PID控制輸出的誤差分別如圖12和圖13所示。
根據(jù)圖8和圖9所示,并聯(lián)機(jī)械手在受到外部載荷50 kg干擾下,采用模糊PID控制方法,機(jī)械手運(yùn)動(dòng)位移和角位移跟蹤誤差最大值分別為2.3 mm和2.0×10-3°;采用模糊前饋PID控制方法,機(jī)械手運(yùn)動(dòng)位移和角位移跟蹤誤差最大值分別為1.1 mm和1.2×10-3°。根據(jù)圖10和11所示,并聯(lián)機(jī)械手在受到外部載荷100 kg干擾下,采用模糊PID控制方法,機(jī)械手運(yùn)動(dòng)位移和角位移跟蹤誤差最大值分別為3.8 mm和2.8×10-3°;采用模糊前饋PID控制方法,機(jī)械手運(yùn)動(dòng)位移和角位移跟蹤誤差最大值分別為1.5 mm和1.4×10-3°。根據(jù)圖12和圖13可知,并聯(lián)機(jī)械手在受到外部載荷150 kg干擾下,采用模糊PID控制方法,機(jī)械手運(yùn)動(dòng)位移和角位移跟蹤誤差最大值分別為5.3 mm和3.9×10-3°;采用模糊前饋PID控制方法,機(jī)械手運(yùn)動(dòng)位移和角位移跟蹤誤差最大值分別為2.2 mm和1.9×10-3°。
因此,并聯(lián)機(jī)械手隨著外部干擾載荷的增大,機(jī)械手輸出的位移和角位移跟蹤誤差也會(huì)增大。但是,采用模糊前饋PID控制方法,機(jī)械手在受到不同外載干擾條件下,機(jī)械手輸出的運(yùn)動(dòng)位移誤差和角位移誤差較小,自適應(yīng)能力較好,從而抑制外界環(huán)境的干擾。
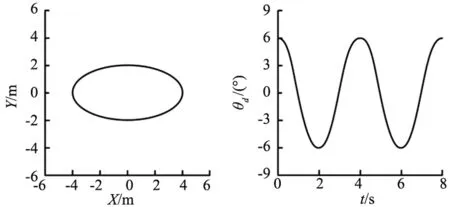
圖6 運(yùn)動(dòng)位移 圖7 運(yùn)動(dòng)角位移
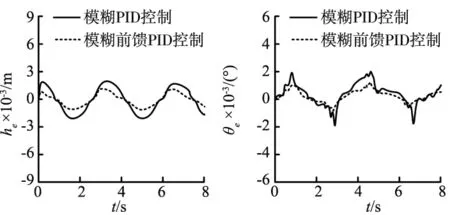
圖8 運(yùn)動(dòng)位移誤差(50 kg) 圖9 運(yùn)動(dòng)角位移誤差(50 kg)
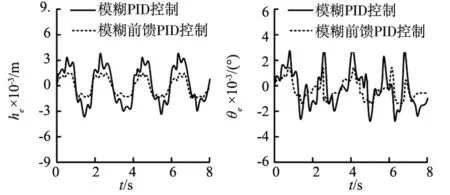
圖10 運(yùn)動(dòng)位移誤差(100 kg) 圖11 運(yùn)動(dòng)角位移誤差(100 kg)
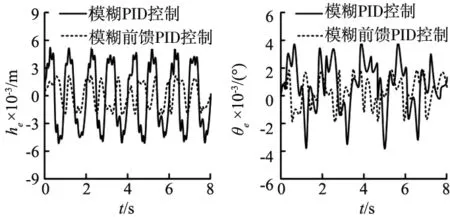
圖12 運(yùn)動(dòng)位移誤差(150 kg) 圖13 運(yùn)動(dòng)角位移誤差(150 kg)
4 結(jié)束語(yǔ)
針對(duì)并聯(lián)機(jī)械手采用傳統(tǒng)模糊PID控制系統(tǒng)輸出誤差較大問(wèn)題,設(shè)計(jì)了自整定模糊前饋PID控制系統(tǒng),并對(duì)并聯(lián)機(jī)械手在不同外部負(fù)載條件下進(jìn)行誤差仿真,主要結(jié)論如下:
(1)并聯(lián)機(jī)械手采用模糊PID控制系統(tǒng),其運(yùn)動(dòng)位移和角位移輸出誤差較大,自適應(yīng)調(diào)節(jié)能力較弱,而采用模糊前饋PID控制系統(tǒng),其運(yùn)動(dòng)位移和角位移輸出誤差較小,自適應(yīng)調(diào)節(jié)能力較強(qiáng)。
(2)在不同外部負(fù)載條件干擾下,隨著外部負(fù)載力的增大,并聯(lián)機(jī)械手運(yùn)動(dòng)位移和角位移跟蹤誤差也會(huì)隨著增大,通過(guò)MATLAB軟件可以對(duì)不同外部負(fù)載干擾情況進(jìn)行仿真驗(yàn)證,可以檢驗(yàn)跟蹤效果。
(3)本文研究的并聯(lián)機(jī)械手運(yùn)動(dòng)位移和角位移跟蹤誤差,在未來(lái)企業(yè)中具有一定的應(yīng)用價(jià)值,并沒(méi)有研究機(jī)械手力矩跟蹤誤差,未來(lái)可以作為進(jìn)一步研究對(duì)象。
