基于RFID的智能化教室座位占空感知系統設計與實現*
2021-03-24 02:49:58楊榮張子博
中國教育技術裝備 2021年12期
關鍵詞:系統
◆楊榮 張子博
0 引言
隨著科技發展,利用傳感技術、物聯網技術等新興技術來改善學習環境、建設智能化教室成為必然趨勢,這些技術在智能實驗室建設與管理中也逐漸應用并發揮重要作用。其中,座位占空感知技術是發展智能化教室/實驗室的重要組成部分。在教學課堂中,它能夠智能統計學生上課出勤率,也可以為教學質量評價提供輔助支撐數據,還可以應用在學生從事自主實踐活動的實驗室場所進行學生人數的統計,輔助實現實驗室智能化管理。
常用的教室座位占空感知技術主要有圖像識別技術、紅熱信號檢測技術等。基于圖像識別技術的座位占空感知系統主要依靠實時采集現場圖像,并與無人情況下的圖像像素分布進行差異對比,來判定相應區域座位上是否有人。該系統設備成本低、處理速度快,但實際應用中受限于教室內的光線情況,可能由于光線的影響而造成一定的識別誤差。基于紅熱信號檢測技術的座位占空感知系統則依靠紅外攝像頭采集到的人體紅外信號,分區域進行紅熱信息識別,進而檢測人體的有無。該系統受到現場溫度限制較大,室內溫度的變化為紅熱信號捕捉增加了很多干擾因素,可能使結果產生較大的誤差。
基于射頻識別技術(Radio Frequency Identification,RFID)實現了C#環境下智能化教室座位占空感知與檢測,進而完成教室課堂考勤系統。RFID系統中布置有讀寫器和讀寫天線,并在每個座位上都布置了檢測所需的射頻電子標簽用于接收并檢測特定信號。讀寫器將收集到的標簽信息傳送到計算機處進行信息處理后,在終端軟件上顯示結果。
1 基于RFID技術的系統設計原理與數據采集
RFID系統在座位占空感知中的應用,基于人體會對RFID設備的通信信號造成干擾的原理實現。無人體干擾情況下的信息采集如圖1a所示,有人體干擾情況下的信息采集如圖1b所示,信息采集的差異體現在有人與無人兩種情況下讀寫器接收信號強度(Received Signal Strength Indication,RSSI)不同[1]。
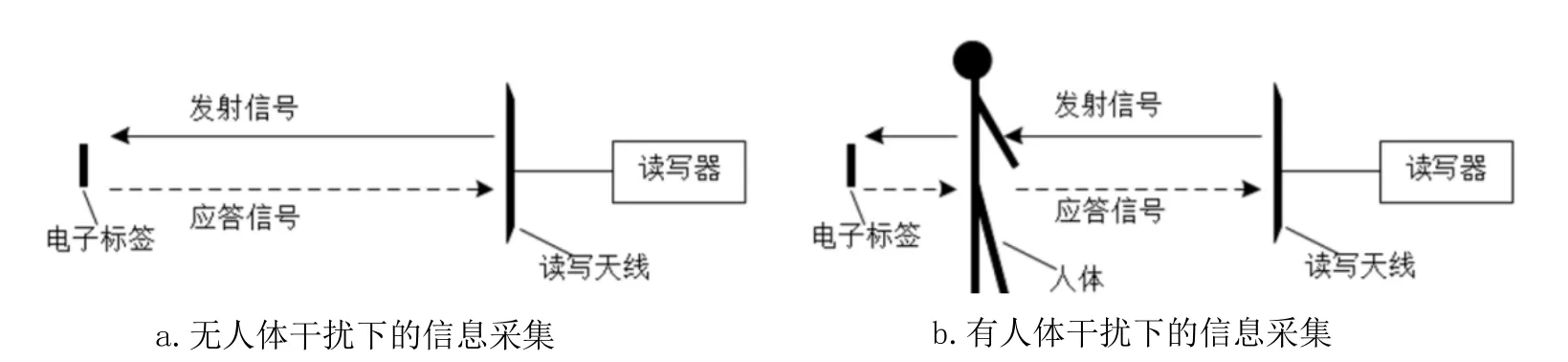
圖1 人體對RFID系統產生干擾的示意圖
基于人體對RFID通信的這種干擾,可以進行基于RFID的座位占空感知技術系統的應用設計。在系統規劃中,教室內布置RFID讀寫器和天線,天線位于座位前方高處;教室內分散布置射頻電子便簽,便簽位于座椅靠背上,人體在座位上會處于標簽與讀寫天線的電磁場中,如圖2所示。在讀寫器與標簽進行通信時,人體會對雙方通信信號產生一個相當明顯的干擾[2-3]。采集到的標簽信息由讀寫器傳送到計算機進行信息處理,判定座位上是否有人。
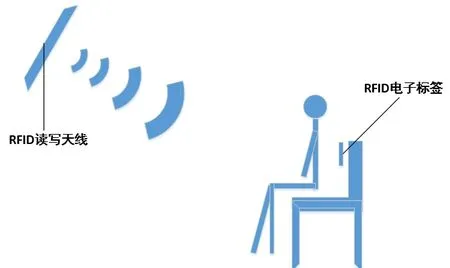
圖2 設備布置方式示意圖
為了保證系統設計的可行性,預先進行實際數據采集和原理驗證。這里進行兩組指定距離下射頻識別系統的接收信號強度數據采集。第一組采集的數據結果如表1所示,采集時讀寫天線距離應答電子標簽4 m,二者之間無任何實物干擾,采集1 000個數據。
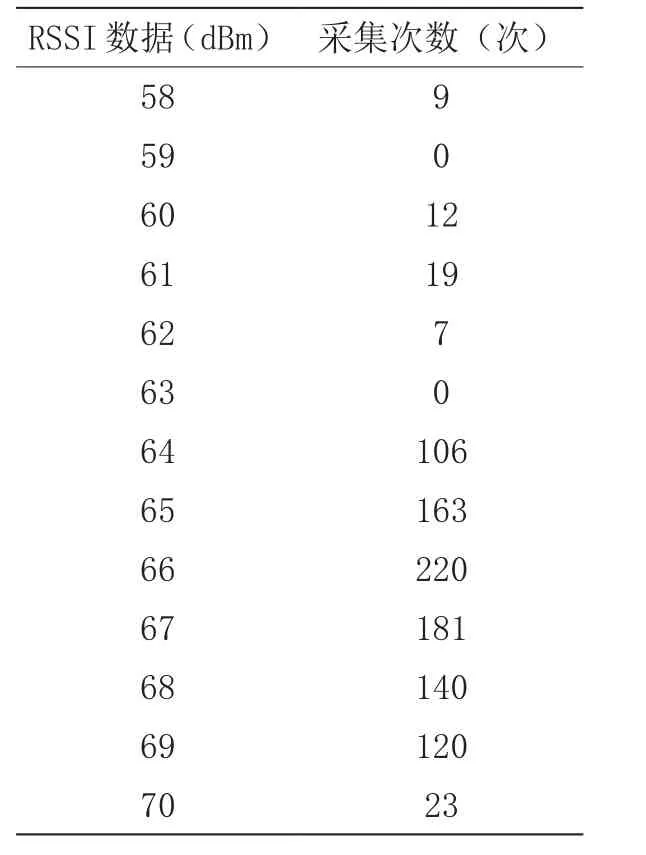
表1 無人情況下的RSSI數據統計
利用采集到的數據進行數據分布圖繪制,數據分布情況如圖3所示。從數據分布情況來看,采集到的數據分布比較穩定,且大部分數據處于64~69 dBm之間。

圖3 無人情況下的RSSI數據分布
第二組采集的數據結果如表2所示,采集時讀寫天線距離應答電子標簽4 m,電子標簽布置在一個座位的靠背上,并且有一個人端坐在座位上,采集1 000個數據。繪制的數據分布如圖4所示,大部分數據處于47~51 dBm之間。
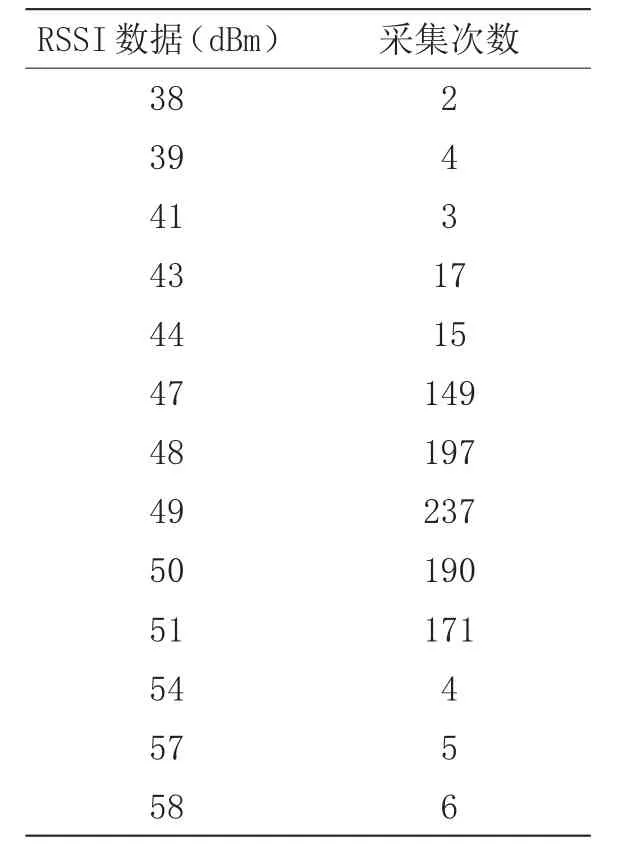
表2 有人情況下的RSSI數據統計

圖4 有人情況下的RSSI數據分布
對采集的兩組數據分布進行對比,數據分布差異直觀地反映了兩種情況下的接收信號強度差異:有人情況下讀寫端依然能夠采集到標簽的回波信號,但是接收信號強度會有明顯的衰減。實驗數據的采集為系統設計提供了可行性驗證。
2 教室座位占空感知系統設計與實現
2.1 系統組成
基于以上數據采集結果,在教室實際環境中進行基于RFID技術的教室座位占空感知系統設計,系統結構如圖5所示,由讀寫器、應答器與應用處理軟件三部分組成。
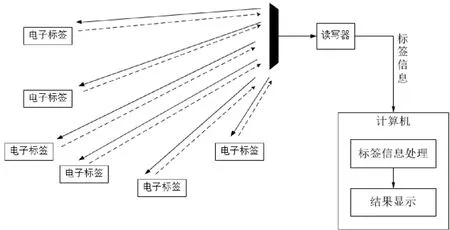
圖5 基于RFID的座位占空感知系統設計
系統使用分體式四通道讀寫器,型號為AFD-8200A。該設備有四個外接TNC天線接口,支持RS232、RS485以及TCP/IP網絡等多種用戶接口;工作頻段為902~928 MHz,配合8 dBi圓極化天線穩定讀取距離為3~5 m,配合12 dBi線極化天線穩定讀取距離8~12 m。
使用的讀寫天線型號為AFD-8600A,其穩定讀取距離可達15 m,支持協議為ISO18000-6C或ISO-1800-6B;其工作頻段為902~928 MHz,功率為1 W,并且可由軟件調整。數據接口方面具備Wiegand263442、RS232以及RS485數據接口。天線增益為12 dBi水平極化。系統使用型號為AFD-501的電子標簽,標簽由PVC材料覆蓋;使用的芯片為Alien公司生產的higgs3芯片,存儲容量為256 B;適用載波頻率為860~960 MHz。標簽為無源電子標簽[4],通過接收到的讀寫天線發射的電磁信號為自身的充放電容充電來提供發射信號所需要的能量。
RFID系統工作原理[5-6]如圖6所示。由于受到設備本身采集速度的限制,實際應用中設備采集標簽信號的方式是每100 ms采集一次。
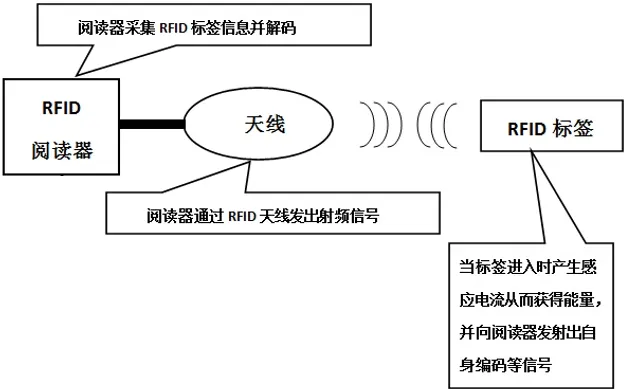
圖6 RFID系統工作原理圖
系統中,軟件部分基于廠家提供的C#語言SDK軟件開發包進行開發,軟件程序內進行數據抓取并完成相關數據處理。在開發包中包含所需要的兩種數據:EPC號和RSSI值。這里將EPC號寫定為所代表的教室內座位號,如標簽布置在教室的第一排第三個座位,則EPC號就寫為0103。
2.2 數據處理
讀寫器采集的標簽數據需交由計算機進行數據處理。依據之前實驗驗證階段所做的工作,需要在采集到足夠的單個標簽的回波信號強度值之后,首先進行數據粗大誤差剔除,之后才能進行數據分布范圍的判定,進而得到座位占空感知結果。
2.2.1 粗大誤差剔除 對采集到的實驗數據進行觀察分析,發現在實際應用中,讀寫器在采集大量信號強度數據時,部分數據會由于受到現場環境干擾而發生一定程度的擾動,形成粗大誤差。為了確保嚴謹,在使用采集到的數據之前需要進行粗大誤差的剔除,以保證數據的穩定分布。常用的剔除粗大誤差的法則有拉以達法則、葛拉卜思法則、肖韋樂法則、迪珂迅法則等。在進行數據處理時,這幾種法則有各自不同的處理偏向性,需要結合其處理特性和實際情況更好地進行選擇。如表3所示,系統進行粗大誤差剔除采用綜合判別法[7],針對不同的測量優先選擇相應的法則進行數據處理。
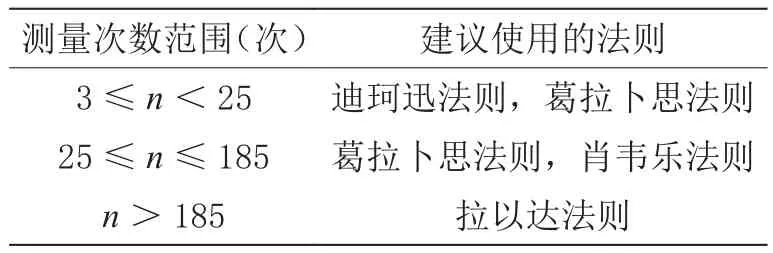
表3 進行粗大誤差剔除的綜合判別法
2.2.2 數據分布范圍判定 在數據處理過程中,不但要對已采集到的數據進行粗大誤差的剔除,還需要進行數據分布范圍的判定。在粗大誤差被剔除之后,對可靠數據進行比較,可直接寫出相應程序判定最大與最小值。取出這兩個值后,函數可直接將其作為返回值,然后與提前設置好的預值進行比對,就能進行座位占空感知的判斷了。
如設定某標簽的EPC號為0105,即該標簽布置在第一排第五個座位上。通過現場數據采集并處理,在無人的情況下,0105的返回信號強度值分布在65~70 dBm之間,則65與70便是可以在程序中設定的預值。在該座位坐人后,再次進行數據采集并處理,此時的返回信號強度值分布在49~54 dBm之間。通過兩組數據的對比可以看出:無人與有人兩種情況下,返回信號強度值的分布偏移幅度相當大。
2.2.3 多徑散射效應驗證 實測時發現人體不但對落座的座位上標簽的返回信號有干擾,同時對臨近座位上所布置的標簽也有一定程度的干擾,這里利用仿真實驗對實際教室內存在的多徑散射效應做出驗證。
1)進行數據采集和熱圖仿真。首先讓四名學生分別坐在第一排的第三及第四個座位、第二排的第三及第四個座位,進行該環境下的接收信號強度數據采集;然后剔除粗大誤差后將采集到的數據用MATLAB進行熱圖仿真,結果如圖7所示。從圖7可以看出:有人落座的座位明顯下凹,而其兩側無人的座位明顯凸起。
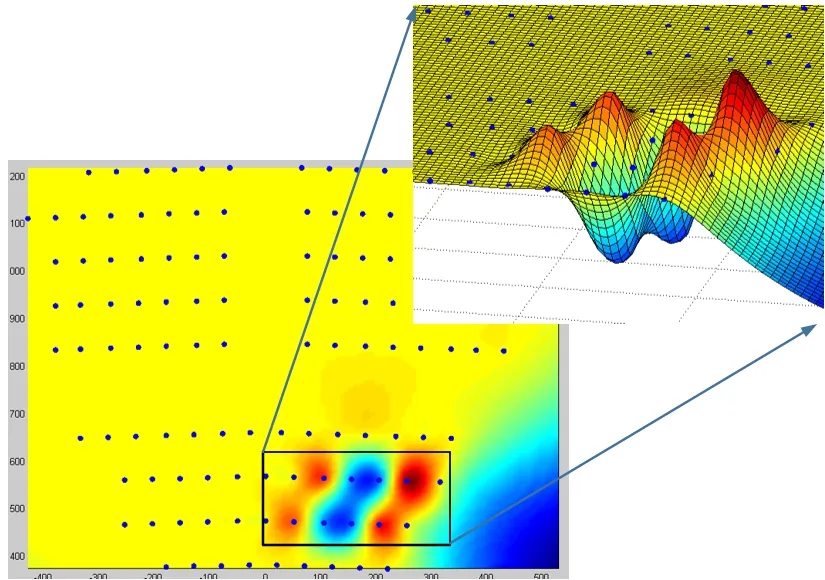
圖7 座位有人的信號強度示意圖(二排,共坐四人)
2)對教室靠后位置的情況進行驗證。讓四名學生分別落座于第六排第六個座位、第七排第六和第八個座位、第八排第七個座位,將采集到的數據再次進行MATLAB熱圖仿真,結果如圖8所示。同樣可以看出:有人落座的座位明顯下凹,而其兩側無人的座位明顯凸起。
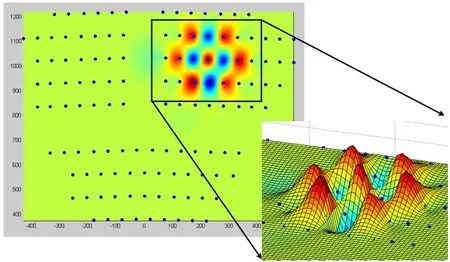
圖8 座位有人的信號強度示意圖(三排,共坐四人)
系統所采用的方案和數據處理準則是:預先設定好每個座位無人時的信號強度值,之后將實測數據與預設值進行對比,低于預設值的判定為有人。根據這個判定原則,有人座位兩側信號強度明顯高于其在無人時的信號強度,人對臨近座位標簽的干擾完全不會影響到系統對結果的判定。
3 教室座位占空感知系統實地測試
3.1 RFID系統在教室的分布
在擁有230個座位的階梯教室布置教室座位占空感知系統并進行實際測試。實驗所使用的射頻讀寫天線為水平極化、增益12 dBi、頻率902~928 MHz。將讀寫天線布置在教室中間講臺上方3.3 m高的位置上測試射頻天線的覆蓋范圍。為了進行更直觀的描述,依據教室結構繪制示意圖,如圖9所示,給出天線覆蓋情況的實際測試結果,每一個圓點代表一個座位。其中實心點代表讀寫天線信號能夠覆蓋的部分,空心點為覆蓋不到的部分。可以看出該天線的實際覆蓋效果比較理想,在該教室布置三臺讀寫天線即可完成對整個教室的信號覆蓋。
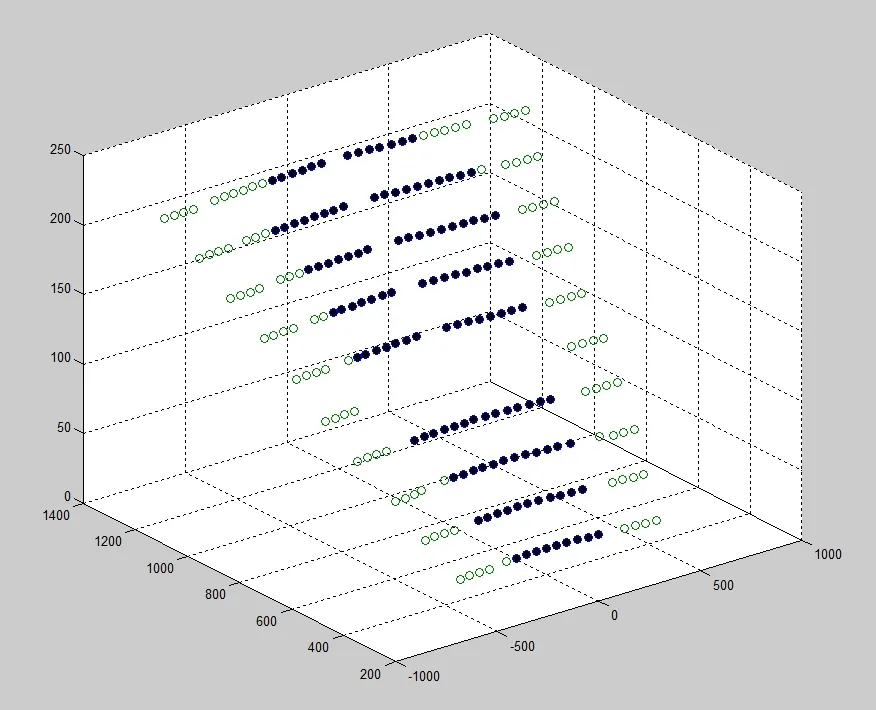
圖9 單個讀寫天線能覆蓋的范圍
3.2 系統工作流程
系統工作流程如圖10所示,可簡單概括為:
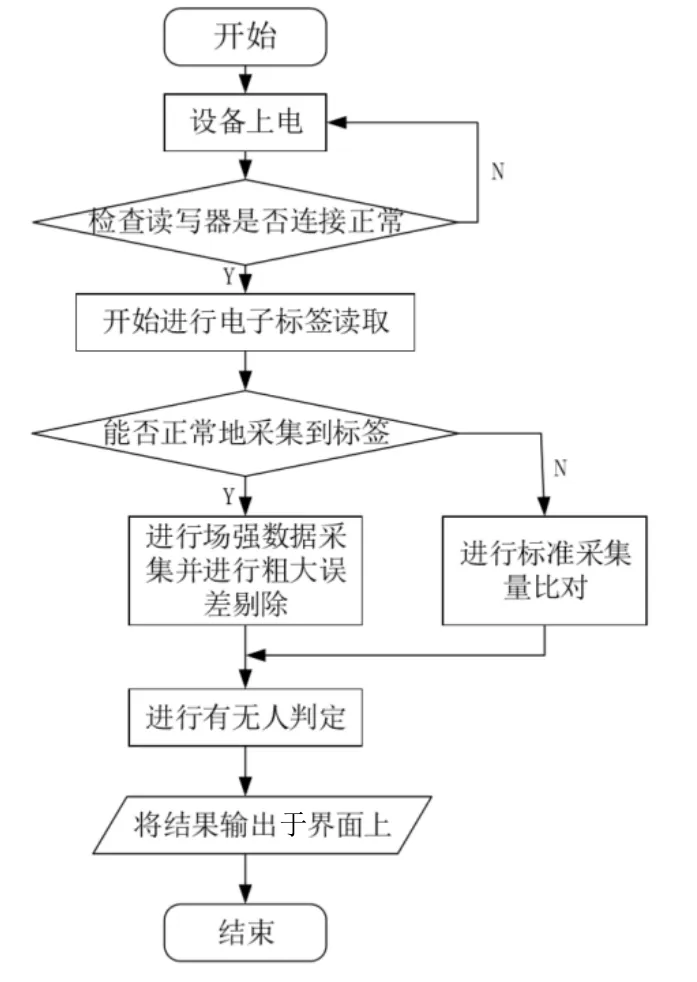
圖10 系統工作流程圖
第一步,設備上電接通后,開始標簽采集工作;
第二步,當對某一特定標簽采集量達到一定數量后,程序開始對數據進行粗大誤差剔除;
第三步,粗大誤差剔除工作完成后,進行數據分布范圍判定,然后與提前設定好的預值進行對比,如果比預設值的分布產生明顯下降,則認為該標簽的返回信號受到人體的干擾,即判定為該標簽所代表的座位是有人的。
以上情況為標簽在能夠采集到電子標簽返回信號的情況時的判定方式,另有一種情況是人體將身后的電子標簽完全屏蔽,此時系統無法通過對數據的處理來進行分析。針對這種情況,系統中提供一個固定時間內的標準被采集量。在系統所限定的固定時間間隔內,提供被采集量的標簽的被采集次數達到指定數量要求時,程序會將該數目與其他待判定標簽的采集量進行對比。如果某一標簽的采集量少于標準采集量時,則認為該標簽在被讀取的過程中有被人體干擾的情況,不能正常讀取,即判定為標簽所代表的座位是有人的。
系統開發用于交互的顯示界面,如圖11所示。
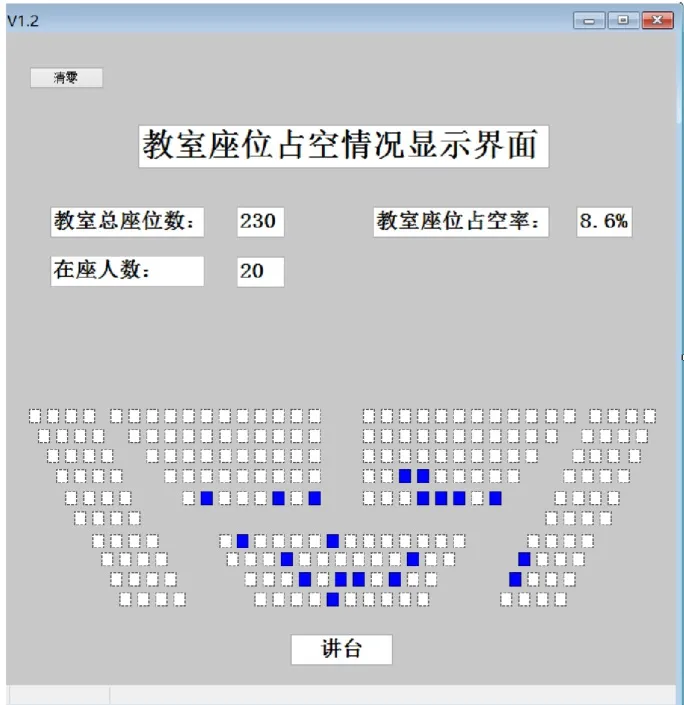
圖11 界面顯示(藍色為有人的座位)
3.3 實測數據結果
在實際應用環境中對系統進行測試以檢驗該系統性能。將系統按照前述布置方式安裝到階梯教室中,整體系統布置方案示意圖如圖12所示,教室前端布置三臺讀寫天線,對教室實現完全的信號覆蓋,虛線部分表示覆蓋范圍。其中一個讀寫天線的安裝位置如圖13所示。將電子標簽布置在教室中的座椅靠背上,作為系統的應答器。三臺讀寫天線都連接到一臺讀寫器上,這臺讀寫器將信息發送至計算機,依靠開發的應用軟件進行信息處理以及結果呈現。
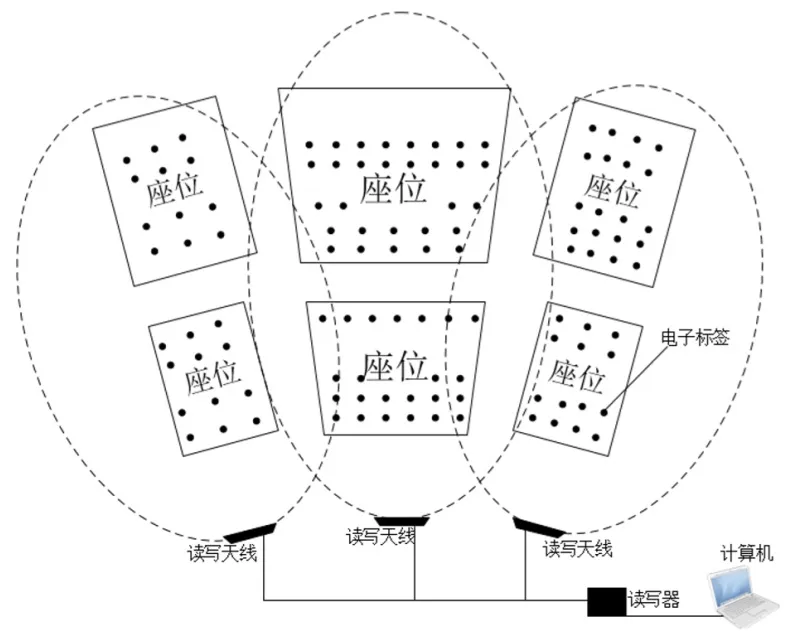
圖12 系統布置方案示意圖

圖13 教室中讀寫天線的位置
表4為利用布置在教室環境下的座位占空感知系統進行測試的實測結果,結果顯示該座位占空感知系統具有較高的正確識別率。其中,由于讀寫天線在遠距離會有比較明顯的信號強度衰減,造成后排的部分標簽有時無法被讀取到,造成一定的測試誤差。
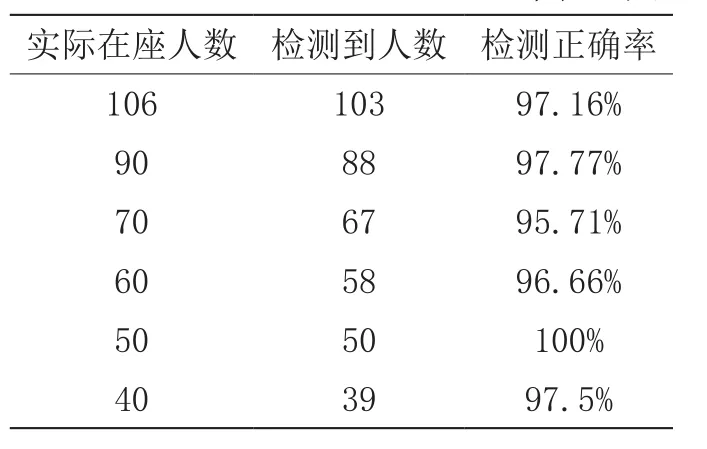
表4 實際測試情況 單位:人
4 結束語
將RFID這一低成本、高效率的應用技術與智能化校園建設相結合,建立基于RFID的教室座位占空感知系統。在實際應用環境中進行大量接收信號強度的數據采集,并對數據進行分析,以驗證系統的可行性。針對實測數據存在的粗大誤差,引入誤差理論研究,并選擇適合于本應用的粗大誤差剔除方法。在此基礎上,進行基于RFID技術的座位占空感知系統的規劃與布置,完成C#環境下的軟件程序編寫和界面開發。系統在實際教室環境中進行測試,獲得較好的測試效果和較高準確率。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32