基于能效感知的無人機協助的視頻數據傳輸
2021-03-21 07:26:36王鈺寧劉曉霞胡云冰
彈箭與制導學報 2021年6期
關鍵詞:區域
王鈺寧,劉曉霞,胡云冰
(1 四川水利職業技術學院信息工程系,四川崇州 611231;2 廈門大學信息學院,福建廈門 361005)
0 引言
由于移動便捷、部署靈活,無人機(unmanned aerial vehicle,UAV)通信已成為滿足下一代蜂窩用戶需求的有效技術[1-2]。UAV給空中和陸地的連接架上通信橋梁,已在多個領域中廣泛使用,如地形測量等。這些應用要求通過UAV將視頻數據傳輸到遠端的陸地節點,進而實現對應用場景的監測。
目前,基于UAV的視頻數據傳輸策略研究較多,文獻[3]由收集數據的UAV(collected data-UAV,CD-UAV)直接向陸地節點傳輸視頻數據。若由CD-UAV直接向陸地節點傳輸視頻數據,CD-UAV的觀察范圍和通信區域受其存儲的數據容量和能量限制。
然而,在多數場景,觀察環境需要收集大面積區域的視頻數據。因此,研究人員試圖擴延CD-UAV的觀察范圍和通信區域[4-5]。一類方法是通過部署高性能天線擴延CD-UAV的通信區域。然而,在CD-UAV上安裝高性能天線增加了部署成本,其不能在大型區域應用。另一方法是引用轉發無人機(R-UAV)轉發CD-UAV收集的視頻數據擴延觀察范圍和通信區域。即不由CD-UAV直接向陸地節點傳輸數據,而是CD-UAV先將視頻數據傳輸至UAV,再由UAV轉發至陸地節點,如圖1所示。將向陸地節點轉發視頻數據的節點稱為R-UAV。為此,針對由R-UAV轉發CD-UAV的視頻數據的應用場景進行研究。

圖1 基于R-UAV的視頻數據傳輸應用場景
目前研究人員對基于R-UAV的視頻數據傳輸策略進行了大量研究[6-8],但是它們只關注了數據吞吐量。然而,利用多個UAV傳輸視頻數據存在多個問題。例如,當多個UAV同時傳輸數據,彼此就會干擾,最終導致數據丟失。
此外,部署UAV時也必須考慮UAV的能量問題。由于可存儲的能量有限,UAV只能工作一段時間。為了有效解決這些問題,必須合理地、有效地使用UAV的能量,即提高能量利用效率(以下簡稱能效)。
文獻[9-10]研究了基于R-UAV的視頻數據傳輸系統的能效問題。然而,它們只關注了正在傳輸數據的CD-UAV和R-UAV的能效問題,忽略了由于它們傳輸數據而對周圍UAV形成干擾的UAV,這些受干擾的UAV需要盤旋飛行等待,在等待期間需要消耗能量。為了表述簡單,將受干擾的UAVs的盤旋飛行等待期間的能效簡稱為盤飛能效。
為了描述簡單,將正在傳輸數據的UAV稱為目標UAV(T-UAV)。T-UAV在傳輸數據時會對周圍的UAV形成干擾,這些受干擾的UAV簡稱干擾UAV(I-UAV)。
為此,針對基于R-UAV轉發的CD-UAV收集的視頻數據的應用場景,研究I-UAV的盤飛能效問題,并提出基于功率控制和R-UAV位置優化的I-UAV的盤飛能效策略(TOEE)。TOEE策略考慮了T-UAV在傳輸數據時對周圍UAV的干擾問題,并將I-UAV在等待空閑信道時所消耗的能量納入總體能耗,這不同于文獻[9-10]的研究工作。
1 系統模型
考慮如圖2所示的網絡模型。CD-UAV拍攝觀察區域視頻數據,并將視頻數據通過R-UAV傳輸至陸地節點[8-9]。

圖2 網絡模型
此外,為了減少R-UAV的轉發數據時延,一旦接收到數據,R-UAV就向陸地節點轉發。為了保證接收和轉發數據同步,在CD-UAV與R-UAV間和R-UAV與陸地節點間采用不同的信道,因此,考慮到不同信道的擁塞情況,需對CD-UAV和R-UAV的傳輸功率和R-UAV位置進行優化。
2 TOEE策略
2.1 UAV飛行時的能效
相比于飛行時所消耗的能量,UAV在傳輸數據時所消耗的能量較小。因此,在最大化總體能量效率時,TOEE算法聚集于I-UAV的盤飛能效。
首先,一架旋轉葉片無人機飛行1 s所消耗的飛行能量為[11]:
Phov=Po+Pi
(1)
式中:Po和Pi分別表示UAV在盤旋時的葉片輪廓功率和感應型功率。因此,T-UAV在傳輸數據時,干擾區域內I-UAV盤旋飛行時所消耗的能量為:
E=(ρ·A+1)Phovta
(2)
式中:A表示T-UAV在傳輸數據時所形成的干擾區域;ρ表示干擾區域內I-UAV的分布密度;ta表示干擾的時間,即T-UAV傳輸數據的時間。
依據式(2)所定義的能量,將能量利用效率(能效)X定義為:
(3)
式中:F表示數據尺寸。TOEE算法旨在通過控制傳輸功率和R-UAV的位置提高I-UAV的能效。
2.2 傳輸功率控制
傳輸功率是影響能效的一個重要因素。在保持通信質量的同時,當通信距離發生變化,傳輸功率也需隨之調整。通信距離與傳輸功率間的關系式為:
(4)
式中:dmax表示最大的通信距離;Pt表示傳輸功率;Smin表示接收器的靈敏度;c表示光速;f表示頻率。
當一個UAV在另一個UAV的通信范圍內時,該UAV就需停止通信,避免形成干擾[12]。因此,將干擾范圍的區域看成T-UAV的通信區域,并依式(5)計算A:
(5)
此外,由于T-UAV在傳輸數據,I-UAV經歷干擾的時間等于T-UAV傳輸數據的時間。因此,依據式(6)計算干擾時間:
(6)
式中:ra表示傳輸速率,其定義如式(7)所示:
(7)
式中:B表示帶寬;D表示通信距離;PI和PN分別表示干擾信號功率和噪聲功率。
然而,若傳輸功率增加,I-UAV的數量就會增加,但它縮短了干擾時間ta。換言之,若減弱傳輸功率,盡管減少了干擾UAV數,但延長了干擾時間。因此,需在I-UAV的數量和干擾時間進行平衡。
因此,將式(2)代入式(3)可得:在T-UAV傳輸數據階段,干擾區域內的I-UAV盤旋飛行時所消耗的能量為:
(8)
TOEE算法旨在通過優化傳輸功率,保證完成數據傳輸的同時,提高I-UAVs的能效。
2.3 R-UAV位置的優化
除了控制傳輸功率外,TOEE算法通過優化R-UAV位置提高I-UAV的能效:
(9)
式中:Etotal表示消耗總體能量。
Etotal=EOR+ERG
(10)
式中:EOR表示CD-UAV作為T-UAV時對鄰近區域內的UAV造成干擾的UAV盤旋飛行時所消耗的能量,即I-UAV所消耗的能量;ERG表示R-UAV作為T-UAV時對鄰近區域內的UAV造成干擾的UAV盤旋飛行時所消耗的能量[13]。由于R-UAV位于 CD-UAV與節點之間,它們間的距離滿足:
DRG=DOG-DOR
(11)
因此,依據式(2),由CD-UAV造成的I-UAV所消耗的能量EOR為:
EOR=(ρ1A1+1)Phovta1
(12)
式中:ρ1表示I-UAV的分布密度;A1和ta1表示在信道1的干擾區域和干擾時間,它們的定義分別如式(13)和式(14)所示。
(13)
(14)
式中Pt,OR表示CD-UAV傳輸數據時的發射功率。
類似的,依據式(2),由R-UAV造成I-UAV的盤旋飛行時所消耗的能量ERA為:
ERA=(ρ2A2+1)Phovta2
(15)
式中:ρ2表示I-UAV的分布密度;A2和ta2表示在信道2的干擾區域和干擾時間,它們的定義分別為:
(16)
(17)
式中Pt,RG表示R-UAV傳輸數據時所消耗的功率。
對于每一個距離DOR,通過合理選擇Pt,OR和Pt,RG可以使總能耗Etotal最小。
3 性能仿真
3.1 仿真環境
在Windows 7操作系統、core i7 CPU的PC上進行實驗仿真。利用MATLAB軟件建立仿真平臺。考慮如圖1所示的網絡模型。UAV在2.4 GHz帶寬上通信,依據通用的通信標準。帶寬設置為20 MHz,具體仿真參數如表1所示。表1中設定了CD-UAV的分布密度和傳輸功率的取值范圍。

表1 仿真參數
此外,為了體現傳輸功率的調整和R-UAV位置優化對能效的影響,考慮4種情況:
1)對傳輸功率和R-UAV位置兩者均進行調整,標記為TP+PU。
2)僅對傳輸功率進行調整,標記為OTP。
3)僅對R-UAV位置進行優化,標記為OPU。
4)既不對傳輸功率,也不對R-UAV位置進行調整,標記為U-TP-PU。
令ρCD表示由CD-UAV形成的干擾區域內I-UAV的分布密度;ρRG表示由R-UAV形成的干擾區域內I-UAV的分布密度,如圖3所示。

圖3 ρCD和ρRG的示意圖
在仿真中考慮3類場景:1)ρCD>ρRG;2)ρCD=ρRG;3)ρCD<ρRG。這3個場景下ρCD和ρRG的具體參數如表2所示。

表2 3個場景參數
3.2 能效
圖4給出場景一I-UAV的盤飛能效隨CD-UAV離節點間平均距離的變化情況。從圖4可知,盤飛能效隨平均距離的增加而下降。原因在于:CD-UAV與陸地節點間距離的下降,壓縮了調整R-UAV傳輸功率和優化R-UAV位置的空間。

圖4 I-UAV的盤飛能效(場景一)
此外,相比于U-TP-PU,OPU和OTP,TP+PU策略的能效隨平均距離增加而下降速度更快。但是TP+PU策略的能效最高,這也說明,通過傳輸功率調整和R-UAV位置的優化,可以有效提高I-UAV的盤飛能效。
圖5給出場景二能效隨CD-UAV離節點間平均距離的變化情況。對比圖4和圖5不難發現,場景二的能效總體上高于場景一的能效。原因在于:在場景二,ρCD與ρRG相等,并且場景二中ρCD小于場景一中的ρCD。ρCD越小,干擾越小,傳輸功率就越小,越有利于能效的提升。

圖5 I-UAV的盤飛能效(場景二)
最后,圖6給出場景三的能效。對比圖6和圖5可以看出,圖6的能效遠大于圖5。原因在于:場景三中ρCD比場景二的ρCD小,并且ρRG高于ρCD。
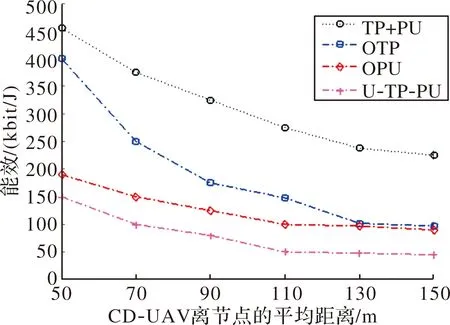
圖6 I-UAV的盤飛能效(場景三)
上述數據表明,當ρCD較小,受干擾UAV的數量越少,I-UAV的能效得到提高。平均距離的增加不利于能效的提高。最初,平均距離的增加使I-UAV的能效快速下降,但當增加至130 m后,下降的速度變緩慢。
4 總結
面向UAV協助傳輸視頻數據場景,提出基于功率控制和位置優化的I-UAV盤飛能效TOEE算法。TOEE算法通過控制傳輸功率和優化R-UAV位置兩個手段提高I-UAV的盤飛能效。仿真數據表明,這兩個手段均可以提高能效。但控制UAV傳輸功率提升能效更為顯著。后期,將考慮大型的UAV網絡,對多無人機系統的組網進行研究。
猜你喜歡
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經大學學報(2015年3期)2015-12-10 03:49:15
