一種起落架前輪轉(zhuǎn)彎系統(tǒng)的冗余控制邏輯設(shè)計(jì)
2021-03-16 04:01:44鄧志云路紅偉王佳琦
裝備制造技術(shù) 2021年11期
鄧志云,路紅偉,王佳琦
(中航飛機(jī)起落架有限責(zé)任公司,湖南 長(zhǎng)沙 410200)
0 引言
起落架前輪轉(zhuǎn)彎操縱系統(tǒng)作為一種提高飛機(jī)地面滑行機(jī)動(dòng)性和著陸安全性的裝置,主要用于飛機(jī)在地面低速機(jī)動(dòng)滑跑時(shí)控制大角度轉(zhuǎn)彎,飛機(jī)起飛滑跑時(shí)控制小角度轉(zhuǎn)彎糾偏,還可以人工解除轉(zhuǎn)彎狀態(tài),使其處于自由轉(zhuǎn)向模式,便于牽引飛機(jī)[1]。
余度設(shè)計(jì)是一種提高起落架前輪轉(zhuǎn)彎控制系統(tǒng)安全和可靠性的有效設(shè)計(jì)方法,使用一倍或幾倍的硬件及軟件資源,確保在關(guān)鍵部件故障時(shí)仍能實(shí)現(xiàn)系統(tǒng)的正常功能,且不削弱或少削弱系統(tǒng)性能,增加系統(tǒng)任務(wù)的可靠性和安全性,實(shí)現(xiàn)產(chǎn)品一次故障工作及二次故障安全等要求。國(guó)外起落架轉(zhuǎn)彎控制系統(tǒng)大多設(shè)計(jì)為雙余度、雙通道構(gòu)型,余度模塊采用局部總線、分布式控制,系統(tǒng)可擴(kuò)展性及可靠性高,但系統(tǒng)架構(gòu)復(fù)雜、實(shí)現(xiàn)成本高。而國(guó)內(nèi)起落架轉(zhuǎn)彎控制系統(tǒng)則多設(shè)計(jì)為雙通道構(gòu)型,余度模塊采用集中式控制,如AG600 等機(jī)型,系統(tǒng)可擴(kuò)展性及可靠性稍低,其系統(tǒng)架構(gòu)簡(jiǎn)單、實(shí)現(xiàn)成本低。此外,國(guó)內(nèi)一些科研單位在余度管理的研究,如文獻(xiàn)[2-3]三控制器的雙余度設(shè)計(jì)、文獻(xiàn)[4-5]兩控制器的雙余度設(shè)計(jì)等都為本研究?jī)?nèi)容也提供了大量可供借鑒成果。
根據(jù)某型飛機(jī)轉(zhuǎn)彎控制系統(tǒng)的數(shù)字電傳升級(jí)需求,在參考和借鑒了國(guó)內(nèi)外主流飛機(jī)轉(zhuǎn)彎控制構(gòu)型及國(guó)內(nèi)有關(guān)余度研究工作的基礎(chǔ)上,針對(duì)前輪轉(zhuǎn)彎系統(tǒng)外圍控制信號(hào)、轉(zhuǎn)彎指令輸入與反饋及核心控制等部件的冗余結(jié)構(gòu),設(shè)計(jì)和實(shí)現(xiàn)了一種主、備冗余控制的單次切換邏輯并進(jìn)行了仿真分析,并在此基礎(chǔ)上進(jìn)一步優(yōu)化為循環(huán)切換邏輯及仿真分析。最后采用了軟件模擬故障注入的方式對(duì)系統(tǒng)主、備冗余切換邏輯進(jìn)行了驗(yàn)證用例設(shè)計(jì),并在某型飛機(jī)轉(zhuǎn)彎試驗(yàn)臺(tái)進(jìn)行了綜合試驗(yàn)。試驗(yàn)結(jié)果表明,設(shè)計(jì)和實(shí)現(xiàn)的冗余切換邏輯有效地實(shí)現(xiàn)主、備控制通道的無縫切換,有效提升了系統(tǒng)的安全和可靠性能,對(duì)其他機(jī)型的前輪轉(zhuǎn)彎控制系統(tǒng)余度控制具有一定的借鑒意義。
1 系統(tǒng)冗余架構(gòu)
本研究涉及的起落架前輪轉(zhuǎn)彎系統(tǒng)為一種雙余度系統(tǒng),是用于飛機(jī)進(jìn)行前輪轉(zhuǎn)彎的控制系統(tǒng),也是一種電氣控制一液壓驅(qū)動(dòng)的位置伺服系統(tǒng),主要由輸入機(jī)構(gòu)(主要包括手輪和腳蹬,通過在手輪和腳蹬上安裝的角度/位移傳感器,將機(jī)械位移轉(zhuǎn)換為轉(zhuǎn)彎角度的電信號(hào),即轉(zhuǎn)彎指令)、伺服控制閥、轉(zhuǎn)彎反饋傳感器、綜合控制單元以及轉(zhuǎn)彎作動(dòng)筒等組成,系統(tǒng)具備系統(tǒng)內(nèi)建自檢測(cè)BIT(Built- in-Test)功能,其雙余度架構(gòu)主要是指前起下到位、前起輪載、轉(zhuǎn)彎/減擺等控制開關(guān)信號(hào)以及轉(zhuǎn)彎指令輸入與反饋等功能部件均為雙余度構(gòu)型,核心控制邏輯為一個(gè)監(jiān)控通道、兩個(gè)控制通道的非相似冗余結(jié)構(gòu),其控制冗余結(jié)構(gòu)如圖1 所示。

圖1 控制冗余結(jié)構(gòu)圖
其中,兩個(gè)控制通道作為前輪轉(zhuǎn)彎系統(tǒng)的中央控制單元,具備相同的功能,同時(shí)上電工作。主要負(fù)責(zé)對(duì)輸入機(jī)構(gòu)的轉(zhuǎn)彎指令和轉(zhuǎn)彎反饋傳感器的實(shí)際起落架前輪轉(zhuǎn)彎角度信號(hào)的采集,通過對(duì)兩個(gè)輸入信號(hào)進(jìn)行轉(zhuǎn)彎控制的邏輯結(jié)算,得出適應(yīng)轉(zhuǎn)彎角度的伺服控制閥驅(qū)動(dòng)信號(hào),驅(qū)動(dòng)伺服控制閥打開要求的開口角度,飛機(jī)液壓油路導(dǎo)通,從而驅(qū)動(dòng)轉(zhuǎn)彎作動(dòng)筒作動(dòng)進(jìn)行起落架前輪轉(zhuǎn)彎,具備系統(tǒng)BIT 功能,同時(shí)與監(jiān)控通道進(jìn)行通信。
監(jiān)控通道作為前輪轉(zhuǎn)彎系統(tǒng)的仲裁單元,負(fù)責(zé)采集輸入機(jī)構(gòu)的轉(zhuǎn)彎指令和轉(zhuǎn)彎反饋傳感器的實(shí)際起落架前輪轉(zhuǎn)彎角度信號(hào),同時(shí)接收兩個(gè)控制通道發(fā)送來的邏輯結(jié)算信息,對(duì)兩個(gè)控制通道發(fā)送的信息有效性決心仲裁,監(jiān)控兩個(gè)控制通道的工作狀態(tài)并對(duì)兩個(gè)控制通道輸出的伺服控制閥驅(qū)動(dòng)信號(hào)進(jìn)行選通,對(duì)出現(xiàn)故障的控制通道進(jìn)行復(fù)位控制。
2 余度控制邏輯設(shè)計(jì)
2.1 余度切換觸發(fā)機(jī)制
控制(主、備)通道的切換邏輯主要由監(jiān)控通道負(fù)責(zé)實(shí)現(xiàn),其核心是確定主/備通道,從而實(shí)現(xiàn)對(duì)主/備控制通道輸出的伺服控制閥驅(qū)動(dòng)信號(hào)進(jìn)行選通控制。系統(tǒng)上電后默認(rèn)為主通道控制有效(即主控制通道輸出伺服控制閥驅(qū)動(dòng)信號(hào),備控制通道不輸出伺服控制閥驅(qū)動(dòng)信號(hào)),當(dāng)檢測(cè)到當(dāng)前控制有效通道異常時(shí),監(jiān)控通道自動(dòng)將控制權(quán)切換到另一控制通道(成為主控制通道),并在檢測(cè)到影響系統(tǒng)正常轉(zhuǎn)彎功能的故障時(shí),監(jiān)控通道將無條件切換到減擺模式(主備控制通道都不輸出伺服控制閥驅(qū)動(dòng)信號(hào)),以確保系統(tǒng)安全。
切換觸發(fā)機(jī)制包括控制通道主動(dòng)通知和監(jiān)控通道自動(dòng)切換兩種,切換的觸發(fā)條件有:
(1)St1:當(dāng)前有效控制通道檢測(cè)到影響正常工作的因素時(shí)(指令及反饋傳感器工作異常等),主動(dòng)停止心跳通信,屬主動(dòng)通知類型;
(2)St2:監(jiān)控通道在系統(tǒng)設(shè)定的BIT 周期數(shù)內(nèi),沒有檢測(cè)到當(dāng)前有效控制通道的心跳信息(St1 或通信故障),屬自動(dòng)切換類型;
(3)St3:監(jiān)控通道對(duì)控制通道發(fā)送的輸入指令進(jìn)行三方仲裁,判定當(dāng)前有效控制通道的輸入指令不可信(超誤差閥值),屬自動(dòng)切換類型;
(4)St4:監(jiān)控通道對(duì)控制通道解算后發(fā)送的轉(zhuǎn)彎輸出指令信息進(jìn)行三方仲裁,判定當(dāng)前控制有效通道的輸出指令不可信(超誤差閥值),屬自動(dòng)切換類型。
2.2 控制邏輯狀態(tài)及信號(hào)定義
(1)控制狀態(tài)包括:
①M(fèi)aBi:主通道有效,備通道空閑,為系統(tǒng)正常工作初始態(tài);
于MiBa:主通道空閑,備通道有效;
③MiBi:主通道空閑,備通道空閑,為系統(tǒng)上電初始態(tài)(減擺模式)。
(2)觸發(fā)信號(hào)滿足的條件包括:
①M(fèi)ok:主通道工作正常,
于Merr:主通道滿足St1~St4 中的一項(xiàng)或多項(xiàng);
③Bok:備通道工作正常;
④Berr:備通道滿足St1~St4 中的一項(xiàng)或多項(xiàng)。
(3)觸發(fā)信號(hào)包括:
①M(fèi)r:檢測(cè)到Mok 的上升沿;
于Mf:發(fā)生Merr 的下降沿;
③Br:檢測(cè)到Bok 的上升沿;
④Bf:發(fā)生Berr 的下降沿。
2.3 切換邏輯狀態(tài)機(jī)設(shè)計(jì)
切換邏輯設(shè)計(jì)為單次切換,即主通道異常后自動(dòng)切換到備通道,切換邏輯結(jié)束。狀態(tài)機(jī)設(shè)計(jì)如圖2 所示,觸發(fā)信號(hào)與條件見表1,切換邏輯流程是:

表1 單次切換觸發(fā)信號(hào)與條件列表

圖2 單次切換邏輯狀態(tài)機(jī)
(1)初始MaBi 狀態(tài)下,檢測(cè)到Mf 信號(hào)時(shí),若有Bok則切換到MiBa 并轉(zhuǎn)入(2),若有Berr 則切換到MiBi 并轉(zhuǎn)入(3);
(2)在MiBa 狀態(tài)下,檢測(cè)到Bf 信號(hào)時(shí),若有Berr 則切換到MiBi 并轉(zhuǎn)入(3);
(3)在MiBi 狀態(tài)下,整個(gè)切換邏輯結(jié)束。
2.4 單次切換邏輯驗(yàn)證與仿真分析
單次切換邏輯驗(yàn)證使用的測(cè)試用例包括:①主備通道都工作異常;于主通道工作正常,備通道工作不正常;③主通道工作不正常,備通道工作正常;④主備通道都工作正常。
仿真環(huán)境:Quartus Prime 17.1,ModelSim SE-64 10.5。仿真驗(yàn)證的主要代碼段如下:
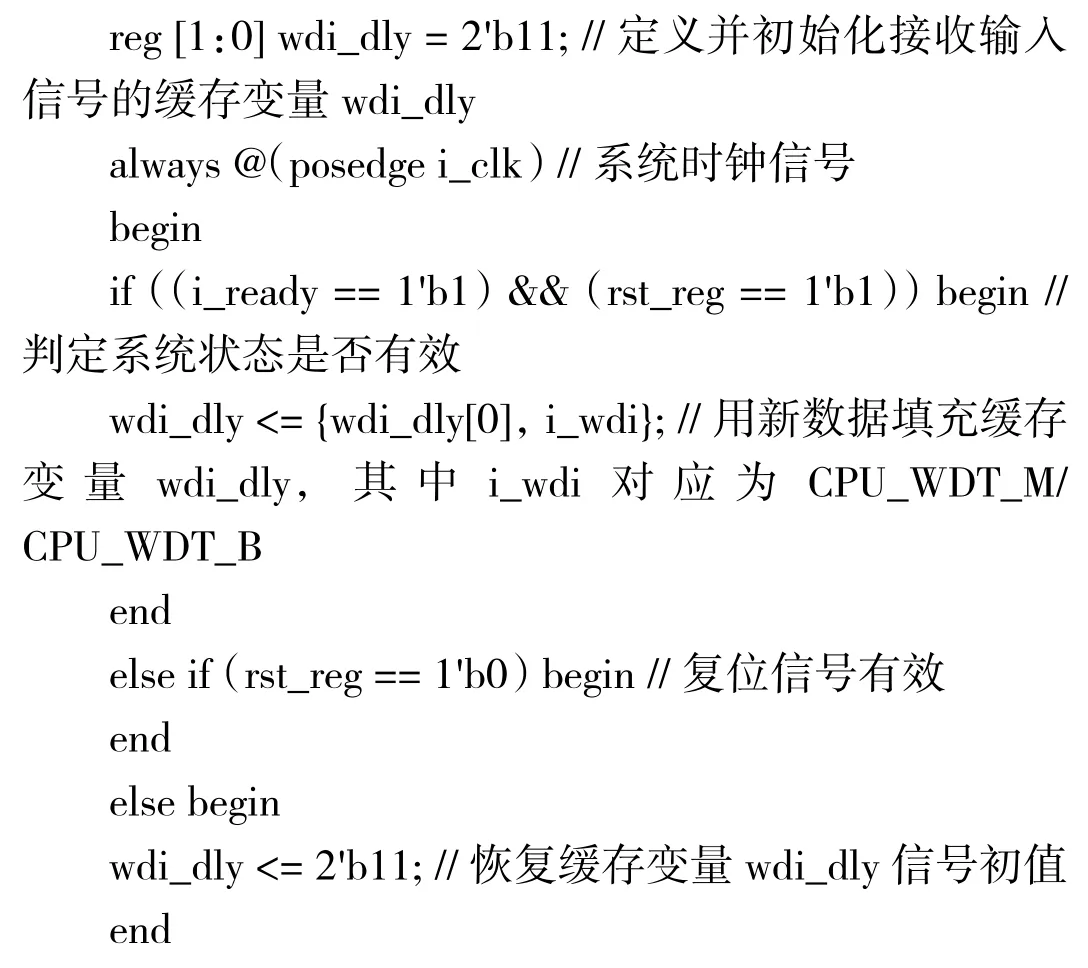

具體仿真分析見表2。
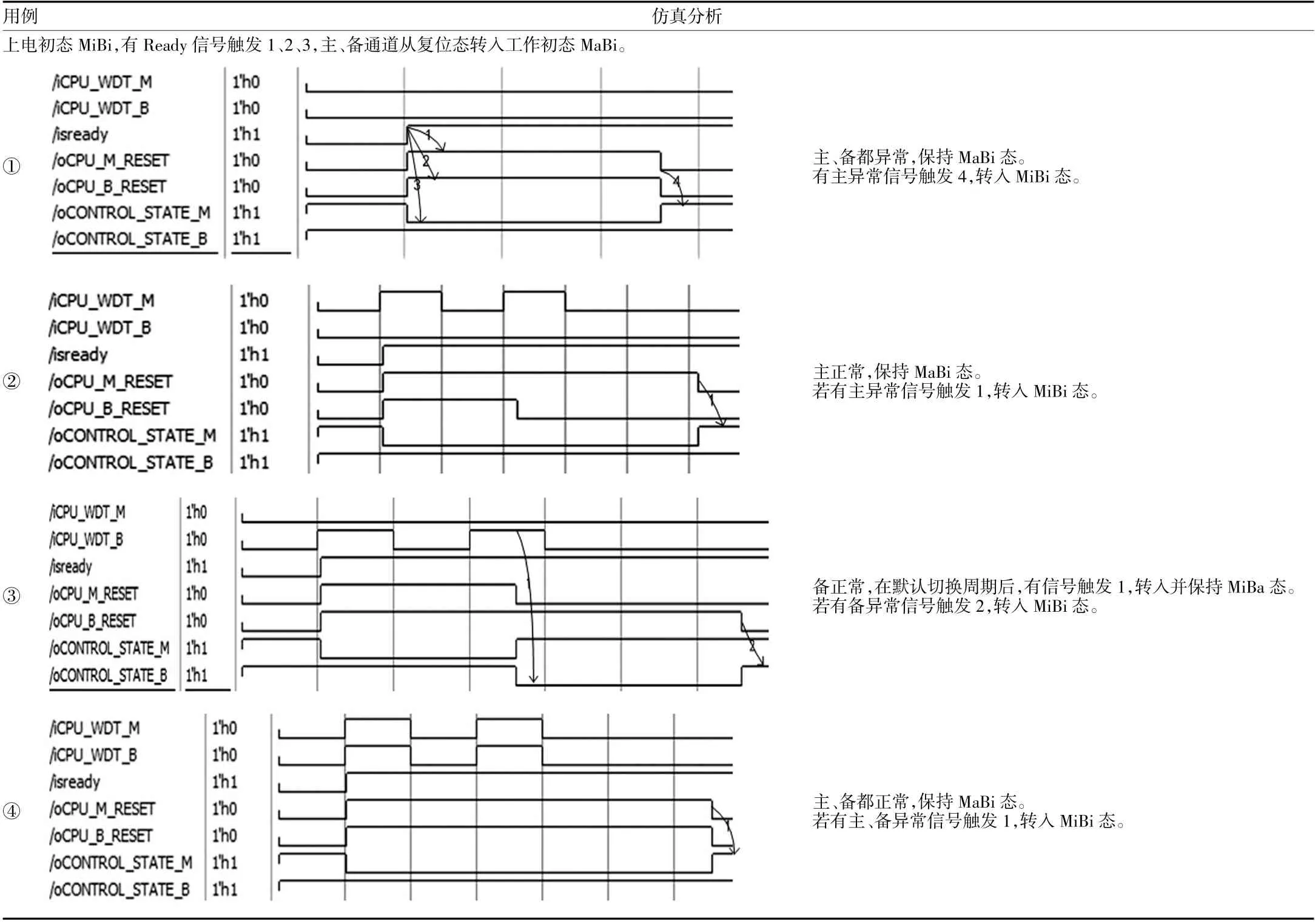
表2 單次切換邏輯仿真與分析
表中,CPU_WDT_M、CPU_WDT_B 是輸入的主備通道喂狗信號(hào),isready 是系統(tǒng)準(zhǔn)備好信號(hào),oCPU_M_RESERT、oCPU_B_RESERT 輸出的主備通道復(fù)位信號(hào),oControl_STATE_M、oControl_STATE_B 是輸出的通道選通有效信號(hào)。MaBi 態(tài)對(duì)應(yīng)oControl_STATE_M=0、oControl_STATE_B=1,MiBi 態(tài)對(duì)應(yīng) oControl_STATE_M=1、oCon-trol_STATE_B=1,MiBa 態(tài) 對(duì) 應(yīng) oControl_STATE_M=1、oControl_STATE_B=0。
經(jīng)仿真分析,設(shè)計(jì)的單次切換邏輯工作正常,能夠有效實(shí)現(xiàn)主、備通道的一次切換。
3 余度切換邏輯優(yōu)化
3.1 存在問題及優(yōu)化思路
在將單次切換邏輯應(yīng)用到實(shí)際的系統(tǒng)綜合驗(yàn)證過程中,由于部分傳感器模塊安裝在起落架的活動(dòng)部位,會(huì)引起傳感器信號(hào)抖動(dòng)導(dǎo)致的采集信息不準(zhǔn)確,而轉(zhuǎn)彎系統(tǒng)的控制精度要求比較高,在進(jìn)行相關(guān)信號(hào)的有效性判定時(shí)容易出現(xiàn)對(duì)通道故障誤判,單次切換能完成主、備通道的一次切換,但不足以難以滿足實(shí)際的應(yīng)用需求。
可行的切換邏輯優(yōu)化思路是:在監(jiān)控通道判定控制通道故障時(shí),對(duì)其進(jìn)行自動(dòng)功能復(fù)位,從而轉(zhuǎn)為備用通道,待下一次需要進(jìn)行邏輯切換時(shí),再將其作為工作正常的控制通道進(jìn)行切換,如此循環(huán)切換工作直至系統(tǒng)斷電。
3.2 循環(huán)切換邏輯狀態(tài)機(jī)
在單次切換的基礎(chǔ)上,當(dāng)切換到備通道后,若備通道也發(fā)生工作異常,則將重新切回到主通道輸出。當(dāng)重新切回到主控制通道后,若主控制通道再次發(fā)生工作異常,則繼續(xù)切換到備通道輸出,如此循環(huán)直至系統(tǒng)停止工作。循環(huán)切換邏輯狀態(tài)機(jī)設(shè)計(jì)如圖3 所示,切換觸發(fā)信號(hào)與條件見表3,邏輯流程是:
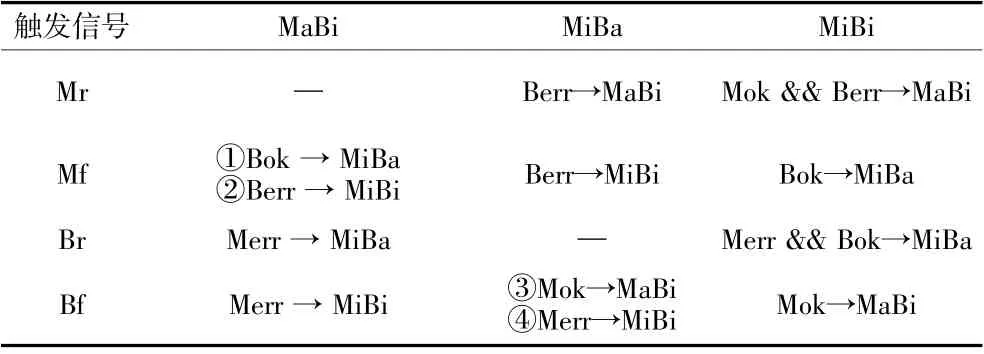
表3 循環(huán)切換觸發(fā)信號(hào)與條件列表
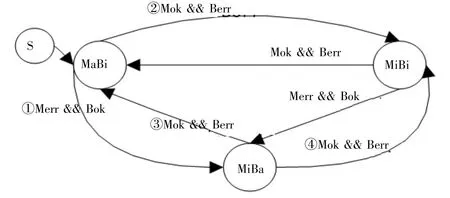
圖3 循環(huán)切換邏輯狀態(tài)機(jī)
(1)初始MaBi 狀態(tài)下:
①檢測(cè)到Mf 信號(hào)時(shí),若有Bok 則切換到MiBa 并轉(zhuǎn)入(2),若有Berr 則切換到MiBi 并轉(zhuǎn)入(3);
于檢測(cè)到Br 信號(hào)時(shí),若有Merr 則切換到MiBa 并轉(zhuǎn)入(2);
③檢測(cè)到Bf 信號(hào)時(shí),若有Merr 則切換到MiBi 并轉(zhuǎn)入3);
(2)在MiBa 狀態(tài)下,
①檢測(cè)到Mr 信號(hào)時(shí),若有Berr 則切換到MaBi 并轉(zhuǎn)入(1);
于檢測(cè)到Mf 信號(hào)時(shí),若有Berr 則切換到MiBi 并轉(zhuǎn)入(3);
③檢測(cè)到Bf 信號(hào)時(shí),若有Mok 則切換到MaBi 并轉(zhuǎn)入1),若有Merr 則切換到MiBi 并轉(zhuǎn)入(3);
(3)在MiBi 狀態(tài)下,
①檢測(cè)到Mr 信號(hào)時(shí),若有Mok 且Berr 則切換到MaBi 并轉(zhuǎn)入(1);
于檢測(cè)到Mf 信號(hào)時(shí),若有Bok 則切換到MiBi 并轉(zhuǎn)入(2);
③檢測(cè)到Br 信號(hào)時(shí),若有Merr 且Bok 則切換到MiBa 并轉(zhuǎn)入(2);
④檢測(cè)到Bf 信號(hào)時(shí),若有Mok 則切換到MaBi 并轉(zhuǎn)入(1)。
3.3 邏輯驗(yàn)證與仿真分析
測(cè)試用例及仿真環(huán)境同上文。仿真驗(yàn)證的主要代碼段在2.4 節(jié)的基礎(chǔ)上增加以下核心代碼:


其中,表4 中的信號(hào)含義與表2 的系統(tǒng)。
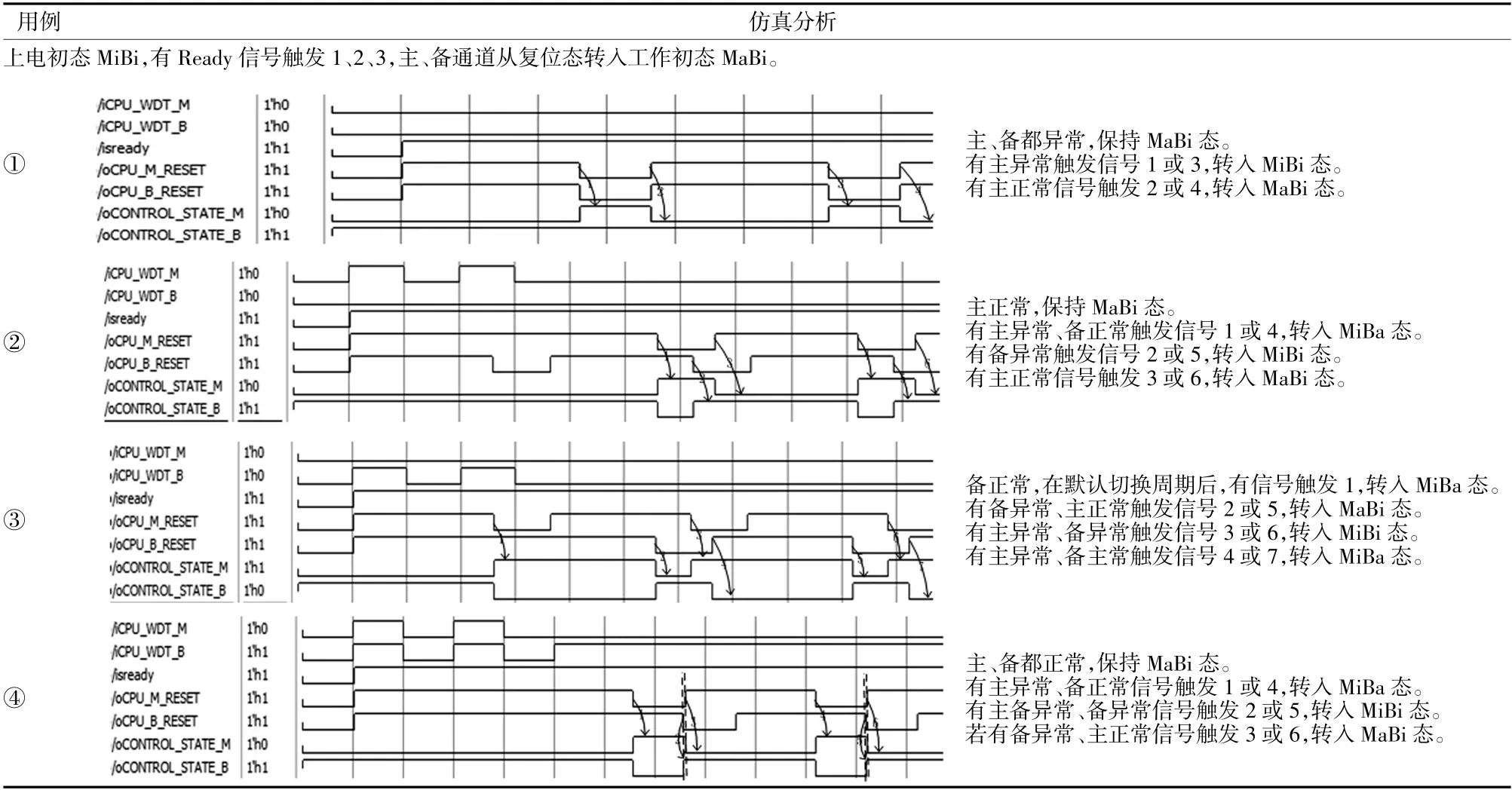
表4 循環(huán)切換邏輯仿真與分析
經(jīng)仿真分析,優(yōu)化后的循環(huán)切換邏輯工作正常,能夠有效實(shí)現(xiàn)主、備通道的循環(huán)切換。
4 綜合試驗(yàn)驗(yàn)證
在余度切換邏輯仿真分析的基礎(chǔ)上,參考文獻(xiàn)[6-8],采用了一種軟件模擬故障注入的方式實(shí)現(xiàn)系統(tǒng)主、備冗余切換邏輯的功能驗(yàn)證,即分別設(shè)置不同的軟件功能模塊來模擬系統(tǒng)硬件的各類故障及軟件異常并固化到系統(tǒng)硬件中,在系統(tǒng)工作的過程中觸發(fā)冗余切換機(jī)制,來判定切換結(jié)果是否符合預(yù)期設(shè)計(jì)。
(1)設(shè)計(jì)的控制通道模擬故障功能模塊包括:
①BIT 異常:包括5V、15V 電壓異常、內(nèi)存檢測(cè)異常、轉(zhuǎn)彎指令、反饋(轉(zhuǎn)彎角度、伺服閥開度)等傳感器工作異常;
于通信異常:包括通信模塊故障、停止心跳通信、停止發(fā)送通道工作狀態(tài)、停止發(fā)送通道輸出的指令信息;
③轉(zhuǎn)彎輸入與反饋指令異常:包括轉(zhuǎn)彎指令傳感器、轉(zhuǎn)彎角度反饋及閥開度等傳感器輸入信息異常;
④轉(zhuǎn)彎輸出指令異常:包括轉(zhuǎn)彎控制輸出指令信息異常;
(2)設(shè)計(jì)的監(jiān)控通道模擬故障功能模塊包括:
①監(jiān)控通道BIT 異常:包括5V、15V 電壓異常,轉(zhuǎn)彎指令、轉(zhuǎn)彎角度反饋及閥開度等傳感器工作異常;
控制通道BIT 異常:接收的控制通道BIT 信息異常;
于通信異常:包括通信模塊故障、在固定的BIT 周期數(shù)內(nèi),無控制通道心跳信息;
③控制通道輸入指令異常:控制通道的輸入指令異常(超誤差閥值);
④控制通道輸出指令異常:控制通道的輸入指令異常(超誤差閥值);
(3)系統(tǒng)綜合驗(yàn)證使用的測(cè)試用例與余度切換邏輯仿真的用例相同。
借助某型飛機(jī)轉(zhuǎn)彎試驗(yàn)臺(tái)進(jìn)行了轉(zhuǎn)彎系統(tǒng)綜合試驗(yàn)驗(yàn)證。經(jīng)驗(yàn)證,在各異常觸發(fā)條件下,冗余邏輯狀態(tài)機(jī)工作正常,冗余切換邏輯功能正常,能夠完成主、備冗余及減擺模式之間的有效切換,符合預(yù)期設(shè)計(jì)。
5 結(jié)論
針對(duì)前輪轉(zhuǎn)彎系統(tǒng)外圍控制信號(hào)、轉(zhuǎn)彎指令輸入與反饋及核心控制等部件的冗余結(jié)構(gòu),設(shè)計(jì)和實(shí)現(xiàn)了的一種主、備冗余控制的單次切換邏輯狀態(tài)機(jī),并在此基礎(chǔ)上進(jìn)一步優(yōu)化為循環(huán)切換邏輯。借用Quartus 硬件設(shè)計(jì)與ModelSim 仿真工具,設(shè)計(jì)了涵蓋實(shí)際情況的多種測(cè)試用例,完成了主、備切換邏輯及其狀態(tài)機(jī)的仿真分析,較好的實(shí)現(xiàn)了冗余邏輯的有效切換工作。最后采用了軟件模擬故障注入的方式對(duì)系統(tǒng)主、備冗余切換邏輯進(jìn)行了驗(yàn)證用例設(shè)計(jì),并在某型飛機(jī)轉(zhuǎn)彎試驗(yàn)臺(tái)進(jìn)行了綜合試驗(yàn)。試驗(yàn)結(jié)果表明,設(shè)計(jì)和實(shí)現(xiàn)的冗余切換邏輯有效的實(shí)現(xiàn)主、備控制通道的無縫切換,有效提升了系統(tǒng)的安全和可靠性能,對(duì)其他機(jī)型的前輪轉(zhuǎn)彎控制系統(tǒng)余度控制具有一定的借鑒意義。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
測(cè)控技術(shù)(2018年5期)2018-12-09 09:04:26
電子測(cè)試(2018年18期)2018-11-14 02:30:34
電子制作(2018年11期)2018-08-04 03:25:42
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12