深空探測天線自抗擾控制技術研究
2021-03-16 08:30:16劉亞兵弓喜忠
無線電工程 2021年2期
關鍵詞:系統
陳 興,趙 鞭,劉亞兵,相 鋒,弓喜忠
(西安衛星測控中心,陜西 西安 710043)
0 引言
深空探測天線在指向和跟蹤目標時,由于其體積巨大,外部擾動(天線抖動、風擾動)影響也隨之變大。目前深空探測伺服系統的設計思想為被動抗擾思想,即采用經典PID控制理論。傳統PID控制器結構簡單、參數易于調整,在工程中廣泛應用,但在超高頻和超大型天線中,其抗擾動能力不足的缺點,使其難以滿足高精度指向和跟蹤的需要[1-2]。
自抗擾控制(ADRC)技術是由韓京清教授根據多年實際控制工程經驗提出的新的控制理論。它是一種以擴張狀態觀測器(ESO)為核心的新型控制技術,是對傳統 PID控制技術的繼承和發展。“自抗擾控制思想”指出了控制的核心是抗擾,為重新認識控制問題的本質和指導解決實際控制問題提供了一種全新的思路。美國Cleveland州立大學的高志強教授通過參數化的方式,給出形式簡單的線性自抗擾控制(LADRC)技術,它的控制參數少而且物理意義明確,十分便于現場調試[3]。
面對未來深空探測任務對天線伺服系統提出的新要求,結合目前工作中遇到的實際問題,本文以某深空探測設備位置環為控制對象,設計了線性自抗擾控制器,通過仿真驗證該控制系統能夠減小陣風對天線造成的擾動,達到提高天線跟蹤精度的目的。
1 基于PID控制的伺服系統及其優缺點
1.1 三環控制系統簡介
深空探測天線伺服驅動系統采用直流電機驅動,分方位、俯仰2條驅動支路。伺服系統采用典型的電流環、速度環、位置環控制,各環節的控制方法采用經典PID控制。系統的結構框圖如圖1所示。
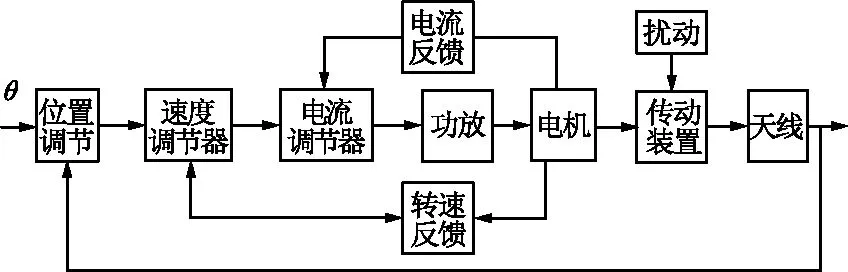
圖1 伺服系統三環控制Fig.1 Servo system three-loop control
經典PID控制的基本思想是基于誤差來生成消除誤差的控制策略,即用誤差的過去、現在和變化趨勢的加權和來得到控制策略。
PID控制使用方便,不依賴于被控對象的數學模型,其控制原理為:利用負反饋獲得系統輸出與期望目標的誤差信號e,將e的比例(P)、積分(I)、微分(D)的線性組合構成控制量u,對被控對象進行控制:
(1)
式中,Kp為比例增益;KI為積分增益;KD為微分增益。PID控制系統原理如圖2所示。
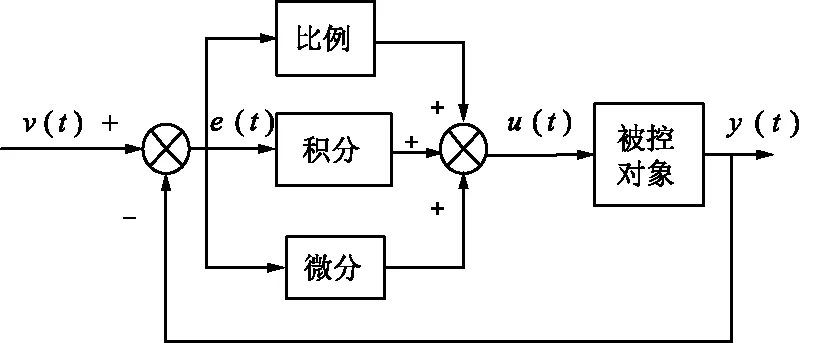
圖2 PID控制系統原理Fig.2 Schematic diagram of the PID control system
1.2 PID控制優缺點
PID控制原理是基于誤差來生成消除誤差控制策略:用誤差的過去、現在和變化趨勢的加權和消除誤差。
優點:
靠控制目標與實際行為之間的誤差來確定消除此誤差的控制策略,而不是靠被控對象的“輸入—輸出”關系,即不靠被控對象的“輸入—輸出”模型來決定控制策略,簡單易行,只要選擇PID增益使閉環穩定,就能使對象達到靜態指標。
缺陷:
① 采用PID校正系統閉環動態品質對PID增益的變化太敏感,當被控對象處于變化的環境中時,根據環境的變化經常需要變動PID的增益。
② “基于誤差反饋消除誤差”是PID控制技術的精髓,但實際情況中直接取目標與實際行為之間的誤差常常會使初始控制力太大而使系統行為出現超調,而這正是導致使用PID控制技術的閉環系統產生“快速性”和“超調”不可調和矛盾的主要原因。
③ PID是用誤差的比例、積分、微分的加權和形式來形成反饋控制量的,然而在很多場合下,由于沒有合適的微分器,通常采用PI控制規律,限制了PID的控制能力。
④ PID是用誤差的過去、現在和將來的適當組合來產生程制量的。經典PID一般采用線性取和方法,但是實際系統多為非線性系統,所以非線性控制器更適合實際情況。
⑤ PID中的誤差積分反饋對抑制常值擾動確實有效,但在無擾動作用時,誤差積分反饋常使閉環的動態特性變差,而對于隨時變化的擾動來說,積分反饋的抑制作用能力又不是很顯著。
2 線性自抗擾控制技術及其參數的整定方法
2.1 自抗擾控制技術簡介
ADRC是針對同時具有內部和外部不確定性的非線性不確定系統的控制問題而提出的,其核心思想是將系統的內部不確定性(定常或時變,線性或非線性)和外部不確定性(外部擾動)一起作為“總擾動”,通過構造“擴張狀態觀測器”對“總擾動”進行估計并實時補償,以期獲得較強的控制不確定的能力以及較好的控制精度。
自抗擾控制結構一般由跟蹤微分器(TD)、擴張狀態觀測器(ESO)、非線性狀態誤差反饋控制律(NLSEF)三部分組成。TD的作用是安排過渡過程并提取其微分信號,減小了系統的初始誤差,解決了系統響應快速性和超調性之間的矛盾;ESO的作用是估計系統狀態和內外擾動的實時作用量,將含未知干擾的非線性不確定性對象化為積分串聯型對象進行控制;NLSEF利用安排的過渡過程及其微分信號與狀態估計之間的誤差的非線性組合和對ESO得到的擾動值的補償來生成控制信號[4-6]。n階自抗擾控制器的結構如圖3所示。
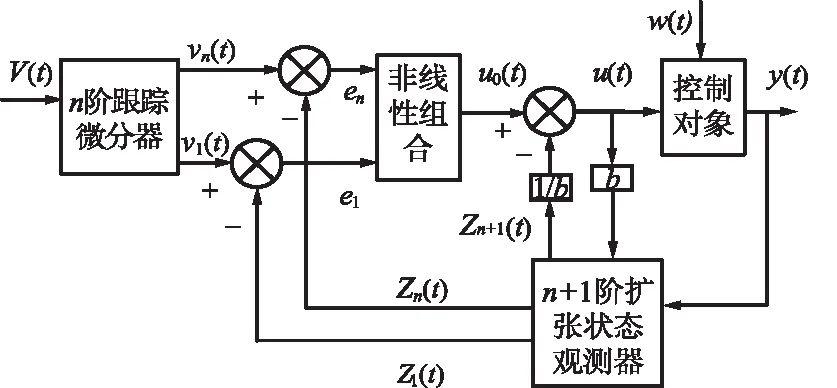
圖3 n階自抗擾控制器結構框圖Fig.3 Block diagram of n-order active disturbance rejection controller structure
2.2二階線性自抗擾控制系統數學模型
雖然ADRC技術在許多實際應用中顯示出了獨特的優越性,但由于非線性函數較多,使得計算量很大,對系統硬件的計算能力提出了更高要求,增加了實時控制難度;另外,控制器中非線性函數參數多,又沒有特定的調整方法,使得參數調整過程復雜,目前還沒有系統的整定方法,限制了其在實際工程中的應用。為此提出了LADRC技術,利用參數化來整定系統參數,即通過設定狀態觀測器的帶寬參數實現簡易參數的整定,使擴張狀態觀測器的可調參數數量由原來的多個降至單一參數,且物理意義明確,易于整定,而這些使LADRC 將成為新型實用數字控制技術[7-8]。下面以二階非線性系統為例,說明LADRC原理。
一般可將二階系統表示為:
(2)
式中,f(t,x1,x2,w)為系統中包括內擾和外擾在內的不確定因素,比如摩擦、量測噪聲、傳感器噪聲、齒隙以及系統對象的動態特性。式(2)可寫成:
(3)

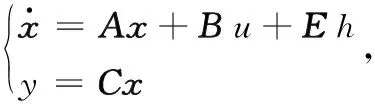
(4)
式中,
則式(4)的線性擴張狀態觀測器(LESO)可寫為:

(5)

為考證ESO的觀測效果同β1,β2,β3的關系,令式(4)減去式(5),可得誤差方程:
(6)
式中,ei=xi-zi,i=1,2,3;
若h為有界量,那么只要選取矩陣L使得Ae穩定(系統的能觀性可以保證這樣的L存在),就有ei→0,則ESO就會得到很好的觀測效果。
由于觀測器可以對系統不確定因素觀測,于是選擇控制器為:
(7)

u0=kp(r-z1)-kdz2,
(8)
由式(6)、式(7)和式(8)所表示的LESO可組成主動抗擾的線性自抗擾控制器,其控制原理如圖4所示。
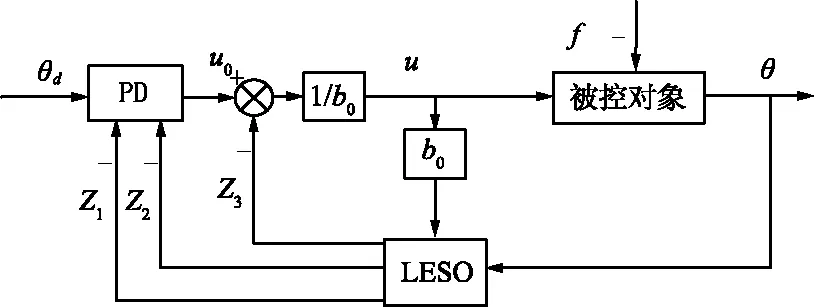
圖4 LADRC控制原理Fig.4 Schematic diagram of LADRC control
2.3 二階線性自抗擾控制系統參數整定方法
LADRC是將ADRC線性化,并將ADRC調參問題簡化為帶寬調參問題,只需調節控制器帶寬ωc、觀測器帶寬ω0以及b0這3個參數即可獲得較滿意的動態性能。其中,ωc決定了控制器的響應速度,在一定范圍內其越大控制效果越好,但過大有可能使系統不穩定,需要根據瞬態響應要求(如調整時間要求)確定,且一般應被限定在可以得到過程變量精確測量值的頻率范圍內;ω0決定了ESO的跟蹤速度,觀測器帶寬越大,ESO估計擾動也越快,但觀測器帶寬過大可能導致噪聲難以忍受或ESO振蕩,故其取值也取決于可接受的噪聲閾值或者使觀測器狀態產生振蕩采樣延時;b0代表了對象的特性,可以由階躍響應中的初始加速度導出。對于常見的大部分工程對象,ω0與ωc可按ω0=(3~5)ωc的關系選擇[9-10]。
3 深空探測天線LADRC仿真3.1 伺服系統天線的風干擾分析
在風的時程曲線中,包含兩部分:① 長周期部分,周期在10 min以上;② 短周期部分,周期通常只有幾秒。根據上述兩部分,實際上把風分為平均風(即穩定風)和脈動風(即陣風)兩部分來分析。考慮到平均風的長周期遠大于一般天線結構的周期,因此這部分風雖然本質是動力的,但其作用與靜力作用相近,可按靜力作用來分析。脈動風是由風的不規則引起的,其強度是隨時間按隨機變化的。它的周期較短,按動力作用來分析。
風吹向圓拋物面天線的情形如圖5所示,在二維體軸座標系內,風載荷有3個分量:
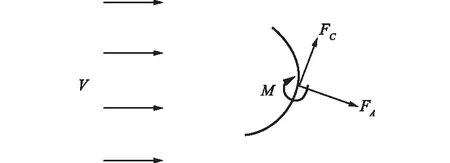
圖5 圓拋物面的風載荷Fig.5 Wind load of circular paraboloid FC=CCqA,
(9)
FA=CAqA,
(10)
M=CMqAD,
(11)
以18 m天線為例,CA取最大值0.43,取風速為8級風平均風速20.7 m/s,q=0.5ρv2=0.5×1.225×20.72=262.45 kg/ms2,天線直徑D=18 m,天線面積A=π(0.5D)2=3.141 592 6×(0.5×18)2=254.47 m2,則方位風力矩為M=CAqAD=0.43×262.45×254.47×18=516 920.94 N·m。若方位減速比為440,方位為4個電機,則每個電機的負載力矩為516 920.94÷4÷440=293.71 N·m。
3.2 控制對象建模
深空探測設備伺服系統位置環由控制計算機及其相關軟件實現,速度環和電流環由相應的硬件采用模擬體制組成,難以進行大的更改,因此,只能對位置環進行相應的算法改進。
首先必須對雙電機驅動伺服系統進行簡化,簡化的原則是系統的實質結構不能簡化,而優化性能的某些環節可以簡化,并且要保證簡化前后系統的性能要盡量接近,如穩定性、快速性和跟蹤性能。具體的簡化如下:
① 去掉濾波環節,包括電流濾波、速度濾波和給定濾波;
② 針對系統近似不可控的情況,對多電機驅動的天線進行結構和動力學分析和建模時可只考慮一臺電機進行驅動,把天線結構剛度假定完全集中在一個齒輪箱上,將天線的轉動慣量看成集中慣量,而負載的轉動慣量為總的轉動慣量的一半,此時電機的各項參數不變[12],如圖6所示。
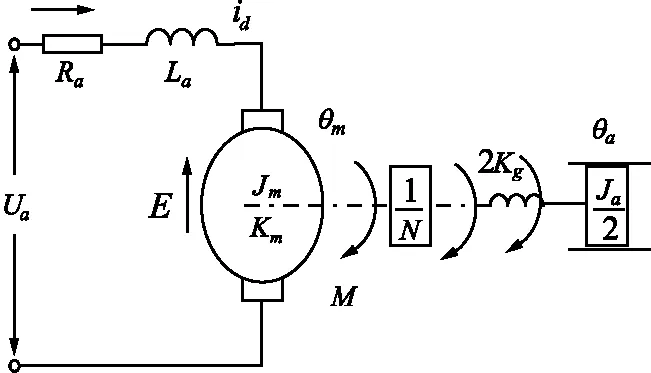
圖6 簡化后的雙馬達驅動模型Fig.6 Model of the simplified double-motor drive
根據電動機的工作原理,設定電機在額定勵磁下運行,可得如下微分方程組[13-14]:
(12)
則系統控制對象方框圖如圖7所示。
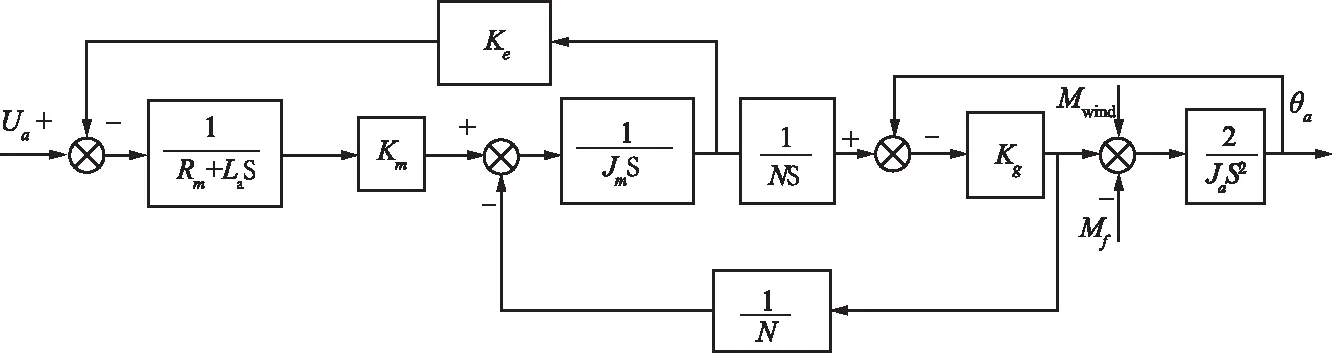
圖7 控制對象方框圖Fig.7 Block diagram of controlled member
(13)
由圖1可得,速度環控制對象一部分為電機電流到電機轉速的傳遞函數,另一部分為電流環閉環傳遞函數,因為電流環帶寬比速度環高得多,電流環可等效為一個小慣量環節,表示為:
(14)
根據速度環的設計指標帶入相關數據,并等效得到速度環等效閉環傳遞函數為:
(15)
3.3 自抗擾控制器設計
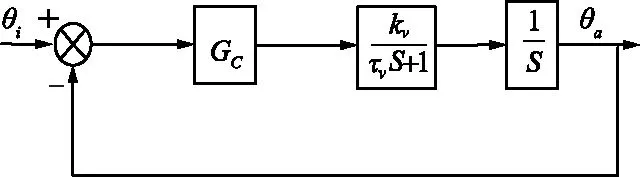
圖8 自跟蹤環控制結構框圖Fig.8 Block diagram of auto-tracking loop control structure
速度環閉環增益kv=24.8,速度環等效時間常數τv=0.08S,GC為所設計的控制器,所以模型中被控對象傳遞函數為:
(16)
(17)
(18)

(19)

3.4 自抗擾控制器仿真
在仿真中,加入周期為1 Hz,折算到電機輸出軸最大力矩為300 N·m的脈動風力矩。為了驗證基于LADRC方法在深空探測伺服系統中的控制效果,用Matlab-Simulink對其在階躍信號輸入下進行仿真,在系統輸出信號加入0.1%的白噪聲,采樣時間為1 ms;LADRC參數ω0=35,ωc=ω0/3,ξ=1,仿真結構圖如圖9所示。同時,給出了在同樣擾動條件下,PID控制仿真結構圖[16],如圖10所示。
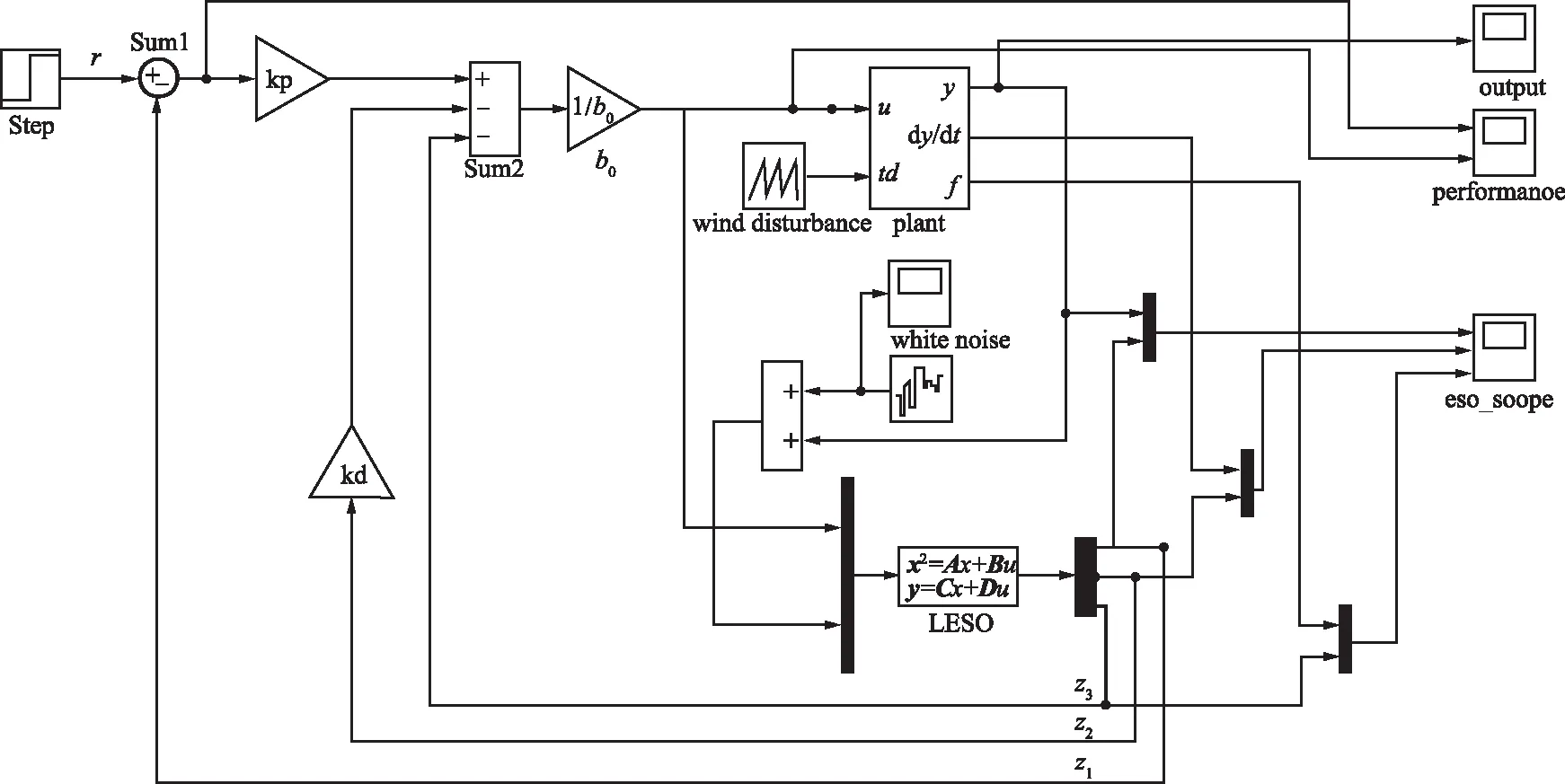
圖9 LADRC控制仿真結構圖Fig.9 Structure diagram of LADRC control simulation
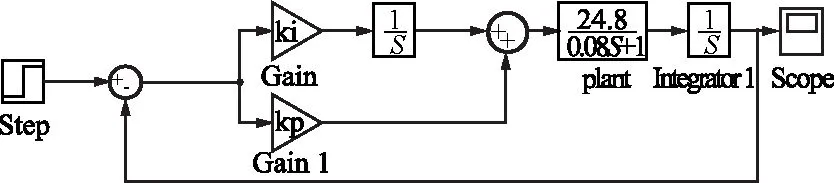
圖10 PID控制仿真結構圖Fig.10 Structure diagram of PID control simulation
在階躍響應輸入下,得到仿真結果如圖11、圖12和圖13所示。
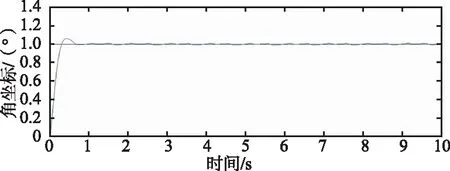
圖11 LADRC控制下的階躍響應曲線Fig.11 Curve of the step response under control LADRC
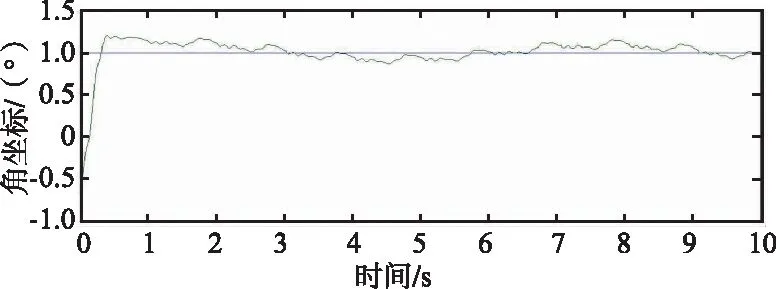
圖12 PID控制下的階躍響應曲線Fig.12 Curve of the step response under PID control
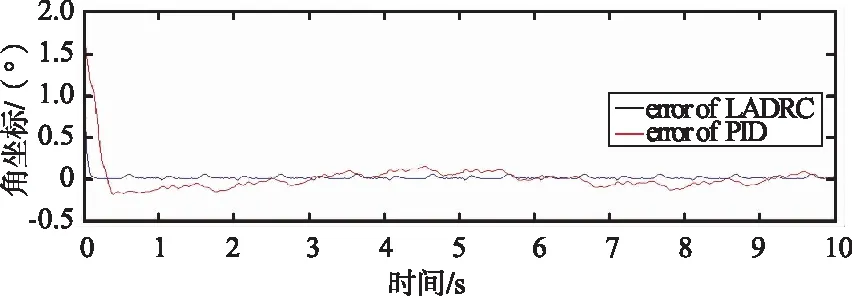
圖13 LADRC與PID控制下階躍響應誤差對比曲線Fig.13 Curves of the error comparisons between the step responses under LADRC and PID control
仿真結果表明,由于LADRC能實時估計出風擾動的變化并進行實時補償,使得LADRC控制下系統抗風擾能力較傳統的PID控制方法大大提高,幾乎不受擾動的影響,階躍響應的上升時間為160 ms,超調量為12%,且在很短的時間內進入穩態值,幾乎沒有穩態誤差。表明系統對外界擾動具有良好的魯棒性和適應性。LADRC方案反應速度快、參數調整簡單,只調節一個參數就能獲得良好的控制性能,同時能夠將系統中影響輸出的所有擾動都抵消。
4 結束語
本文提出在深空探測設備伺服系統位置環采用線性自抗擾控制,從Matlab仿真結果看,該方法對比PID控制,其抗風擾能力顯著增強,實現了對陣風擾動較好的抑制性能。采用線性自抗擾控制的伺服系統具備良好的抗擾特性,這為深空探測系統提高跟蹤精度提供了新的方法,具有很強的現實意義。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
