基于EtherCAT的倍福IPC與SIMOTION運動控制器的通信研究
2021-03-16 04:01:04李楨輝
中國新技術新產品 2021年24期
康 樂 李楨輝
(許昌煙草機械有限責任公司,河南 許昌 461000)
0 引言
目前,煙草機械設備從傳統PLC 控制開始逐漸向IPC 靠攏,基于PC 的控制技術提供了良好的可升級性和靈活性,倍福IPC 以其具有的EtherCAT 技術成為主流控制器[1-2]。在公司生產的裝盤機上采用了倍福的CX2020 IPC 控制器,該控制器基于PC 控制,配合TwinCAT 軟件能夠實現設備的邏輯控制、數據存儲等功能,裝盤機的電機動作采用西門子SIMOTION D 運動控制器,西門子的運動控制器所支持的協議為Profinet,該協議與倍福支持的EtherCAT 協議不能直接進行數據交換,因此,需要對倍福IPC 與SIMOTION 運動控制器之間的通信進行研究,使倍福控制器能夠正常地與運動控制器進行數據收發,從而保證設備的正常運行。該文在公司所研發的裝盤機的基礎上,選用EL6631 通信協議轉換模塊對2 種通信協議進行轉換,通過在倍福控制器和運動控制器上進行通信配置的方法使兩者之間可以正常通信。
1 通信架構
公司研發的裝盤機需要完成對煙支的臨時裝盤存儲,邏輯動作較多,對系統的實時性要求較高,需要多個外部傳感器來配合完成裝盤動作,裝盤機電控系統的詳細通信架構如圖1 所示。圖1 中,裝盤機采用倍福IPC 作為主控制器,采用西門子SIMOTION D435 運動控制器作為伺服控制單元;同時,通過EtherCAT 總線下掛外圍輸入模塊,通過E-BUS連接內部輸入輸出模塊,圖1 中的17A6 為EL6631 通信協議轉換模塊。
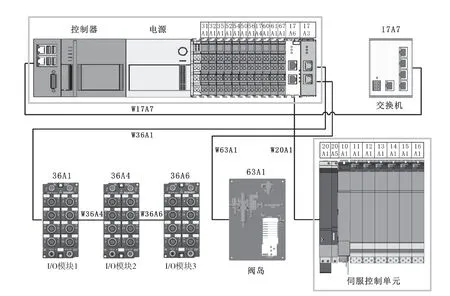
圖1 裝盤機通信架構圖
除運動控制器外,所選用的從站均支持EtherCAT 協議。為了實現基于EtherCAT 的倍福IPC 與SIMOTION 運動控制器的通信,選用倍福EL6631 作為EtherCAT 與Profinet 協議轉換模塊,它作為EtherCAT 和Profinet 之間的網關,連接了2 個實時以太網系統,EtherCAT 端子模塊系統能夠通過EL6631 模塊將現場總線集成到工業以太網系統中,使倍福控制器和SIMOTION 運動控制器之間能夠正常收發數據,為完成設備的邏輯控制和運動控制提供保障。
2 接口配置
在圖1 所示的通信架構的基礎上,需要完成對運動控制器和倍福IPC 兩端的接口設置工作,因為倍福IPC 作為主站、SIMOTION 作為從站,所以需要先對SIMOTION 進行配置。
2.1 SIMOTION 接口配置
SIMOTION 接口的配置是通信正常連接的關鍵,包括SIMOTION 網絡配置、I-DEVICE 輸入/輸出設置以及GSD 文件導出[3-4]。
2.1.1 SIMOTION 網絡配置
SIMOTION 網絡配置是使運動控制器連接IPC 的重要步驟。SIMOTION D435 有3 個用來進行以太網數據通信的端口(X127、X130 以及 X150),X127、X130 支持Ethernet,X150 支持Profinet 協議。根據運動控制器設定僅有X150 端口可作為I-DEVICE 設備與倍福IPC 進行數據交換,因此,選用X150 端口作為運動控制器與倍福IPC 的通信端口,選用X127 端口作為計算機調試端口。根據選用端口可配置不同端口的IP 地址,詳細的網絡配置如圖2 所示。
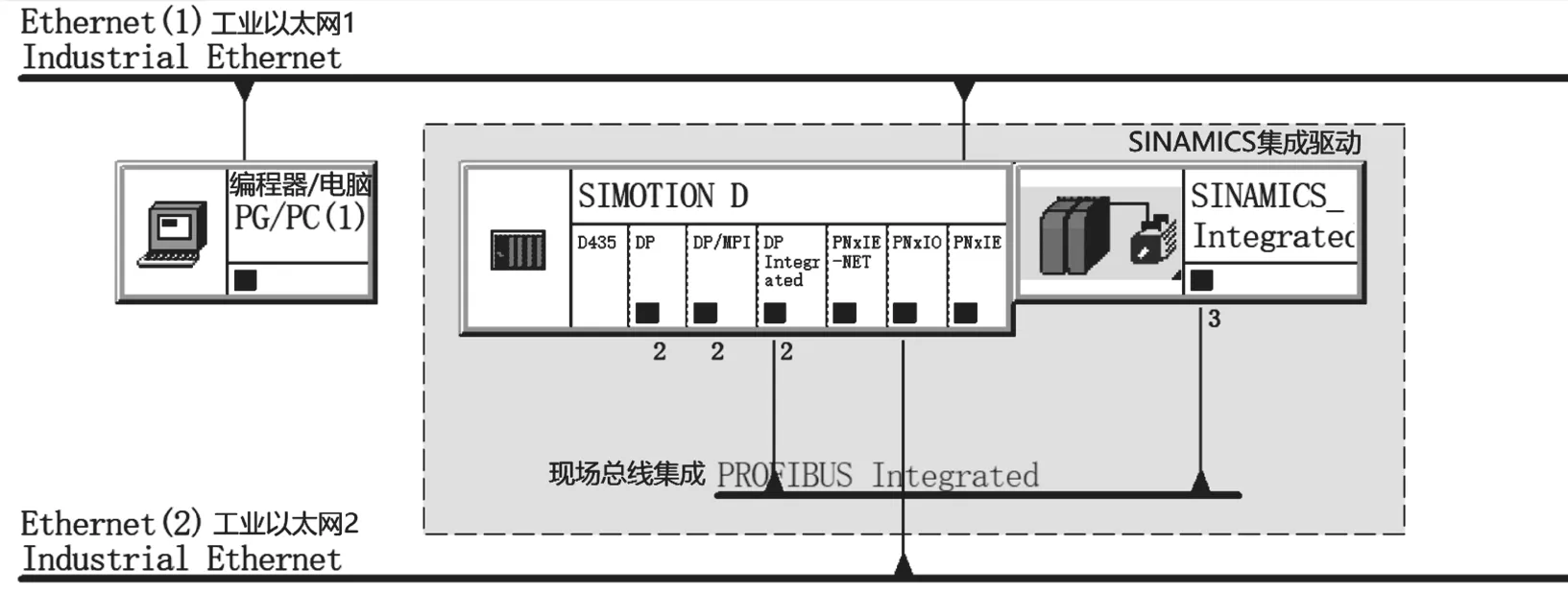
圖2 SIMOTION 網絡配置圖
在圖2 中建立了2 個虛擬網絡,使網絡1 連接到X127 端口,將IP 地址設置為168.254.11.22,使網絡2 連接到X150端口,將IP 地址設置為192.168.0.10。
2.1.2 I-DEVICE 輸入輸出設置
I-DEVICE 又叫做智能設備或智能I/O 設備,其本身是上層I/O 控制器的I/O 設備,又作為下層I/O 設備的I/O 控制器。要實現倍福控制器與運動控制器的通信,必須將X150端口設置為I-DEVICE 模式,同時定義輸入、輸出地址長度,供之后的通信使用。SIMOTION 運動控制器作為智能設備可以作為I/O 設備連接上層倍福控制器,SIMOTION運動控制器通過接收倍福控制器發出的指令控制電機運動。同時,SIMOTION 運動控制器又將電機運動的過程值反饋給倍福控制器,以判斷、發送電機邏輯運動指令,I-DEVICE 的相關設置如圖3 所示。
如圖3 所示,I-DEVICE 設備須定義輸入、輸出。將輸入、輸出各定義為512 個字節供通信使用,創建512 個字節輸入、輸出變量為測試需求,可根據具體需求自行配置輸入、輸出。
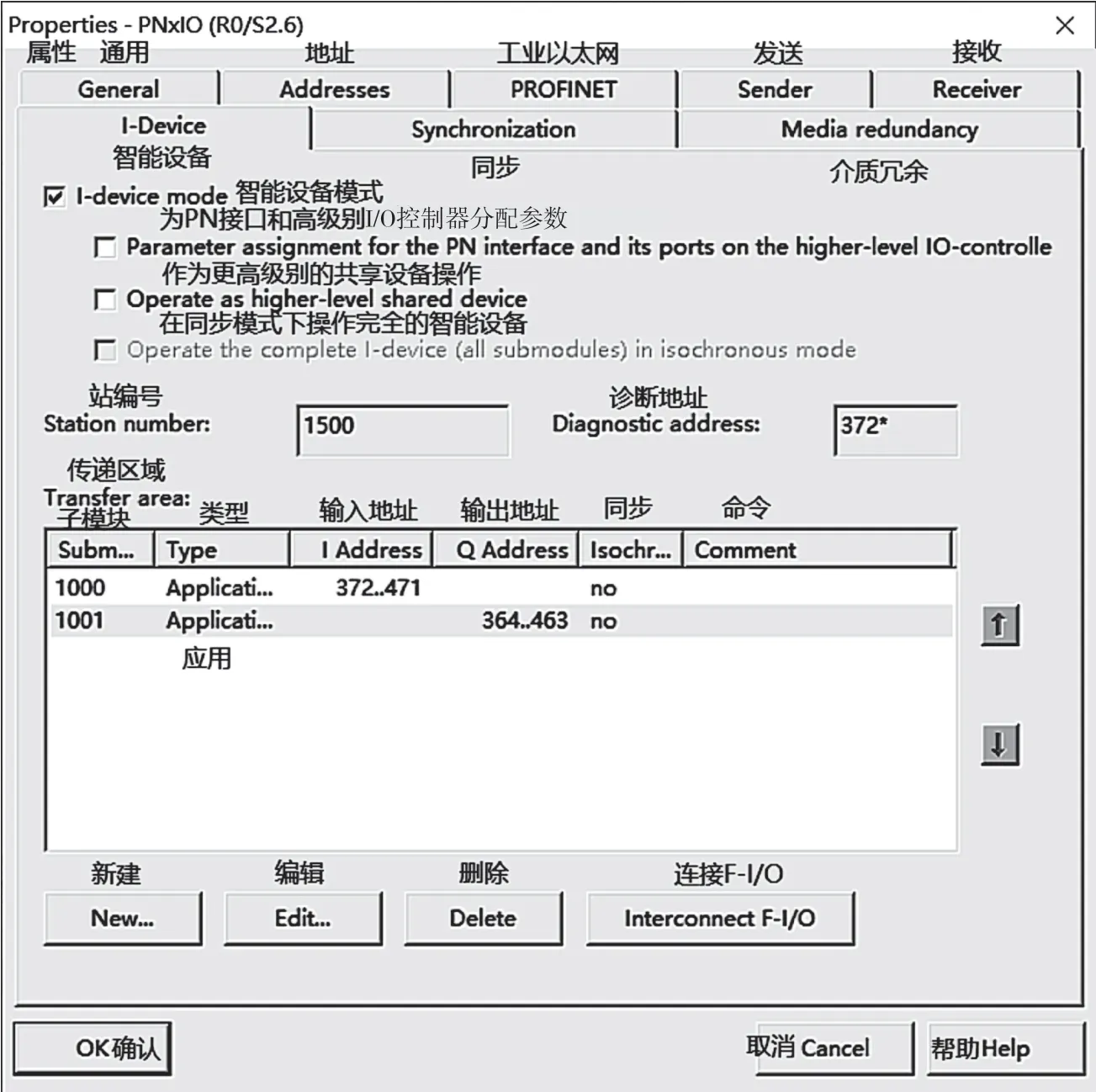
圖3 I-DEVICE 設置
2.1.3 GSD 文件導出
當完成網絡配置及I-DEVICE 設置后,可通過SIMOTION中的GSD 創建文件功能來生成GSD 文件,然后將GSD 文件導入倍福驅動文件夾供其掃描SIMOTION 設備。GSD 文件創建設置如圖4 所示。
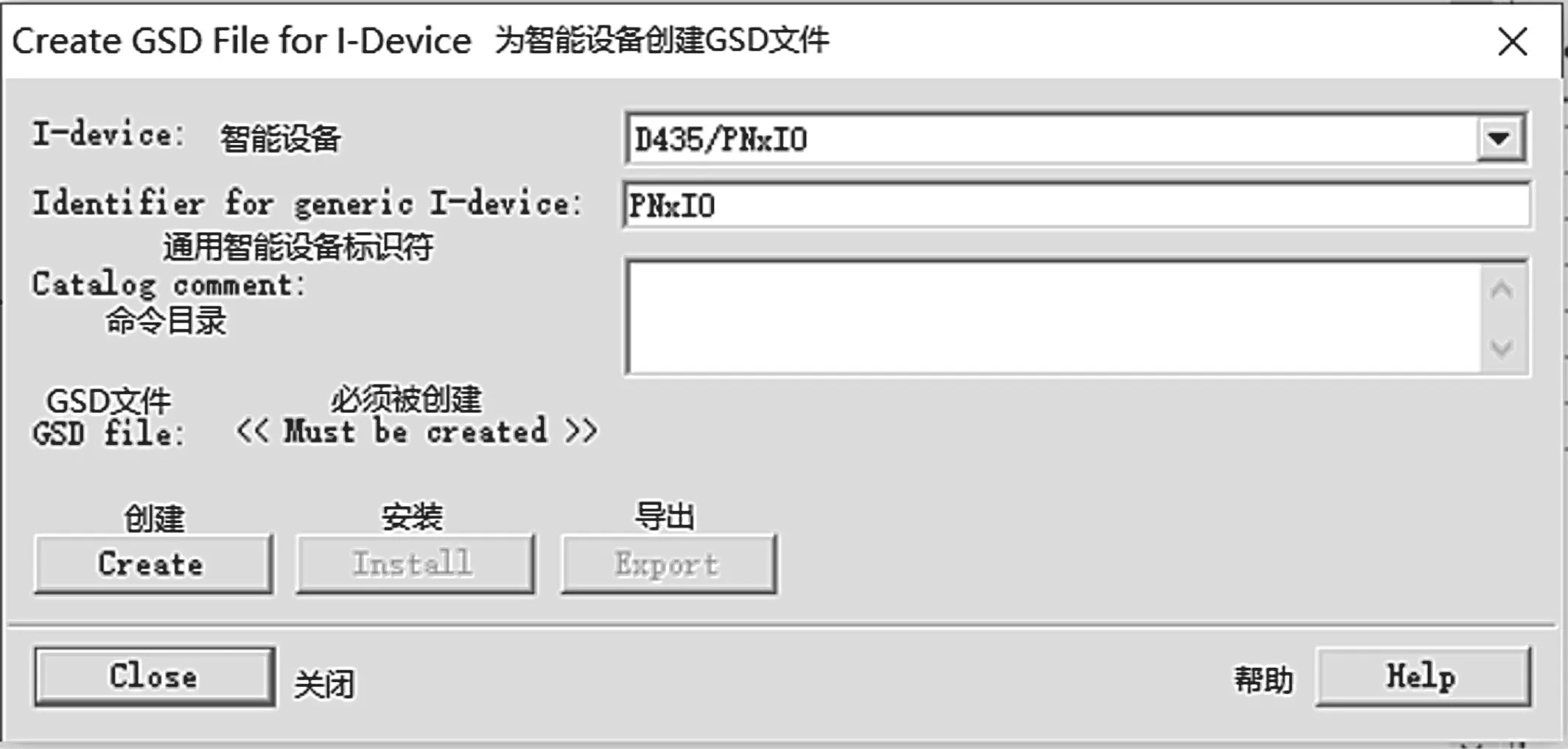
圖4 GSD 文件創建設置
2.2 倍福IPC 接口設置
完成SIMOTION 接口配置之后,需要在倍福IPC 中配置接口。倍福IPC 接口配置包括GSD 文件導入、添加EL6631以及模塊設置[5-7]。
2.2.1 GSD 文件導入
將SIMOTION 運動控制器生成的GSD 文件復制到筆記本的TC3 安裝路徑:C:TwinCAT3.1ConfigIoProfinet。該步驟為倍福IPC 與SIMOTION 運動控制器通信的必要步驟,如果不進行配置,那么作為主站的倍福控制器就不能對運動控制器進行掃描。
2.2.2 添加EL6631模塊
EL6631模塊通過E-bus與倍福控制器連接,在TwinCAT3軟件中新建項目后,通過掃描硬件功能可以掃描出在倍福控制器下掛載的EL6631 模塊,該模塊還處于未激活狀態,不能進行正常的通信協議轉換,需要手動再次添加EL6631 模塊并對模塊進行配置才能正常使用。因為SIMOTION 運動控制器選用I-DEVICE 模式,可實現實時通信的功能,所以在倍福控制器端需要選擇EL6631 模塊的RT 版本,使之與I-DEVICE 的實時通信相匹配,這樣才能保證對設備運動控制的實時性。
2.2.3 模塊設置
手動添加EL6631 后需要對模塊進行配置,使EL6631 能夠正常識別SIMOTION 運動控制器。對模塊的設置包括以下3 個部分:1) 指定其Adapter 為手動添加的EL6631。操作方法如圖5 所示。該步驟為必要步驟,如果不選擇EL6631 作為適配器,那么將無法掃描SIMOTION 運動控制器。2) 從Device(EL6631) 的Setting 頁面設置Profinet 主站IP。需要注意的是,要使主站的IP 地址與運動控制器的IP 地址在同一個網段,只有這樣才能保證通信正常。對倍福IPC 主站的IP 地址設定如圖6 所示。在Settings 頁面中輸入需要修改的主站IP,單擊Set IP settings 即可修改主站地址。3) 從Device(EL6631)的右鍵菜單中單擊Scan Box。該步驟將掃描到的從站顯示在列表中,此時添加從站即可實現正常的通信。4)查看設備的掃描周期并修改PLC 任務周期,使掃描周期與任務周期匹配,保證通信數據傳輸正常。按照上述步驟正常添加后,在倍福IPC 端應顯現在SIMOTION 端所配置的I/O 變量,具體的變量顯示如圖7 所示。其中,能夠顯示在SIMOTION 控制器中所添加的512 個輸入和輸出。
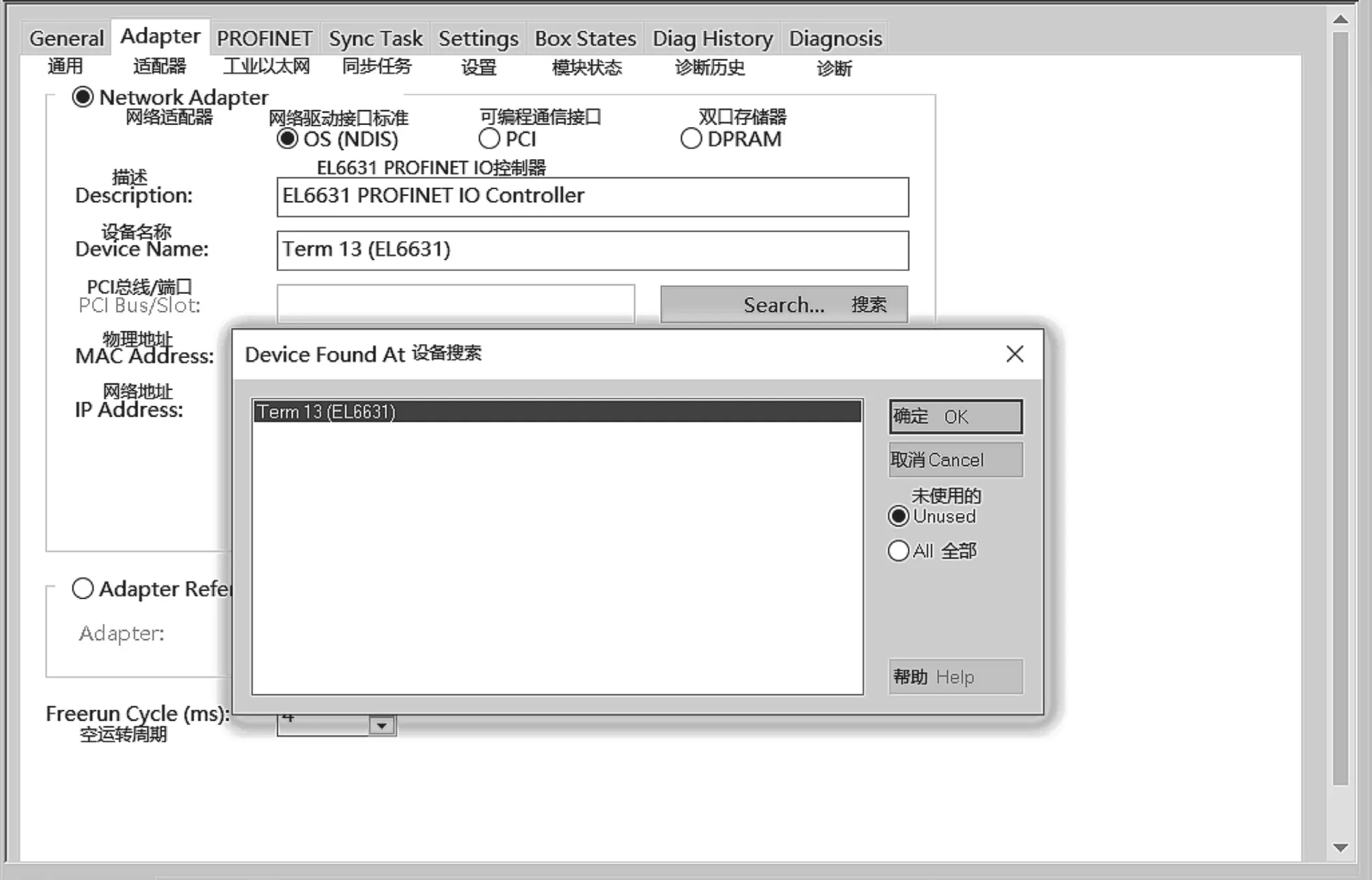
圖5 Adapter 設置
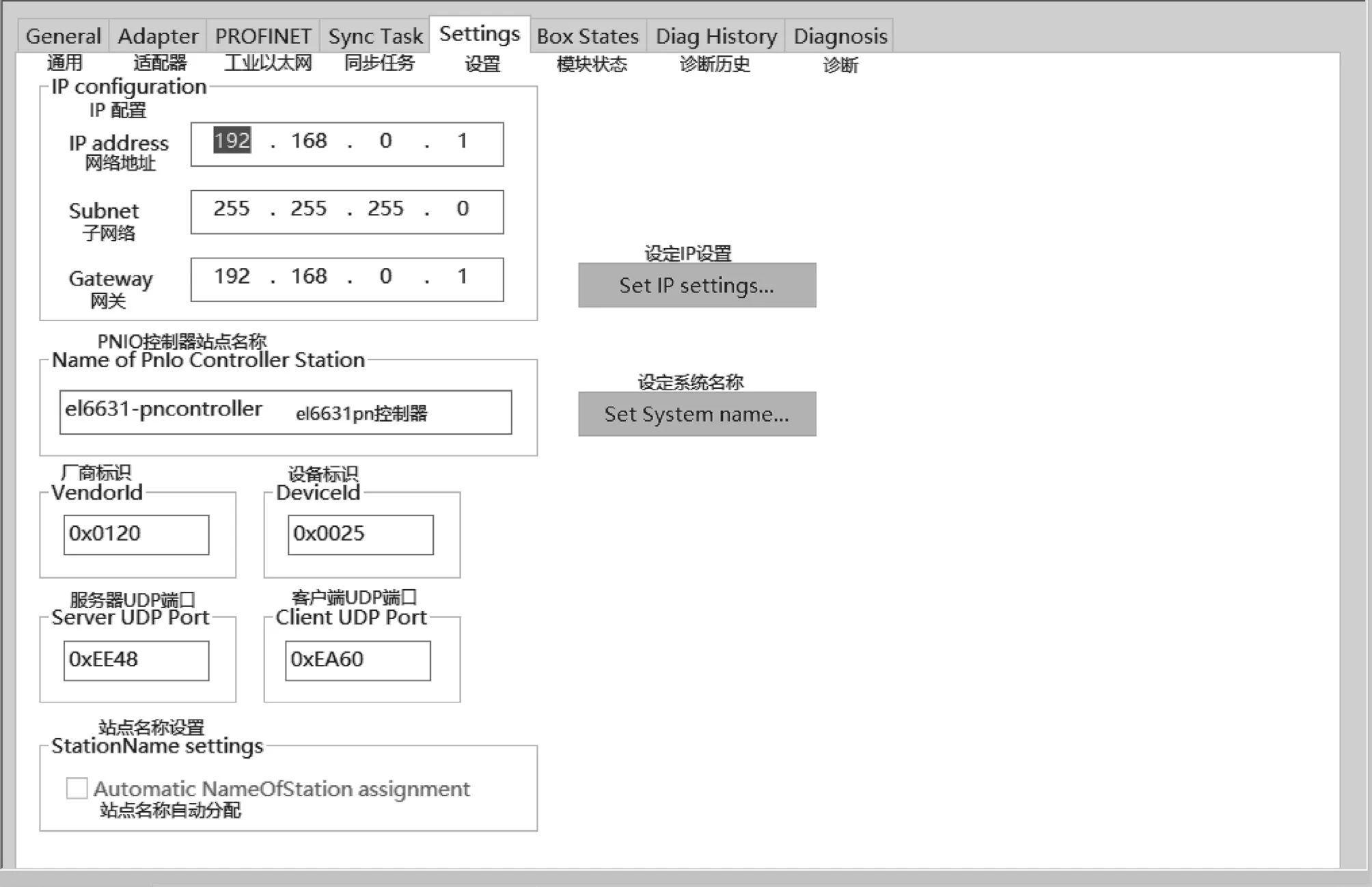
圖6 主站IP 地址修改
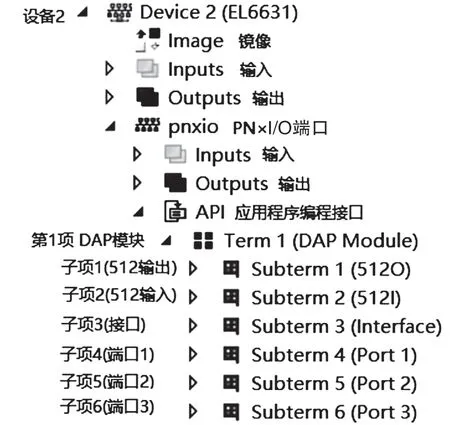
圖7 正常添加后倍福控制器中顯示的變量
3 通信測試
為了測試倍福IPC 與SIMOTION 運動控制器之間的通信是否正常及通信的實時性,在倍福IPC 端和SIMOTION 端分別選用5 個輸入變量、5 個輸出變量來進行數據通信,具體變量見表1、表2。
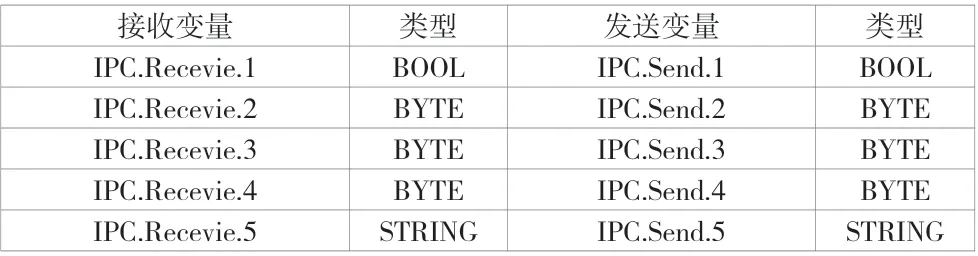
表1 倍福IPC 接收及發送的數據
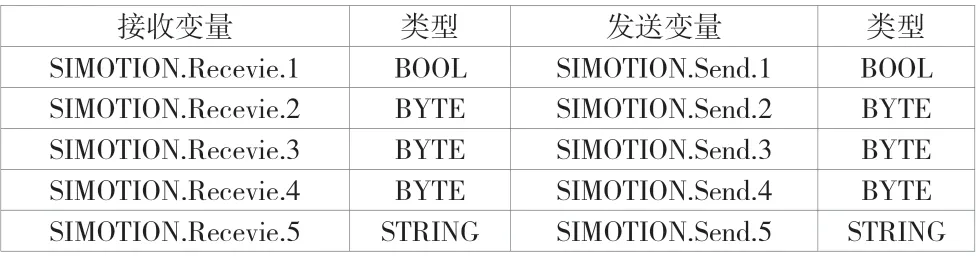
表2 SIMOTION 運動控制器接收及發送的數據
在表1 和2 中,IPC.Send 變量對應SIMOTION.Recevie變量,SIMOTION.Send 對應IPC.Recevie 變量。IPC.Send.1 和SIMOTION.Send.1 發送內容均為1 s 脈沖信號,可以判斷系統的實時性;IPC.Send.2-4 和SIMOTION.Send.2-4 發送內容均為16 位進制數字,IPC.Send.5 和SIMOTION.Send.5 為字符串變量,這些變量可以判斷數據傳遞的正確性。
分別將IPC.Send 和SIMOTION.Send 變量寫入對應內容,然后觀察IPC.Recevie 和SIMOTION.Recevie 的變量顯示是否與輸入變量一致。經測試,在倍福IPC 和SIMOTION 運動控制器通信正常的情況下,倍福IPC 和運動控制器各自接收的脈沖、16 進制數字及字符串變量均與發送內容相同,倍福IPC 和SIMOTION 之間發送接收數據的實時性和正確性均保持正常。通信測試驗證了文中關于倍福IPC 和SIMOTION 運動控制器配置的正確性。目前,基于這2 種通信協議的研究已成功應用于公司生產的裝盤機上,該研究也為其他基于EntherCAT 的倍福控制器和Profinet 設備的正常通信提供了支撐。
4 結語
倍福IPC 以其特有的EtherCAT 技術受到越來越多自動化行業的青睞,但是自動化設備的多樣性使各個公司的產品不可能全都采用EtherCAT,西門子設備支持的通信協議為Profinet,這就使倍福IPC 的EntherCAT 需要與西門子的Profinet 進行通信,從而保證設備的正常運行。該文對基于EtherCAT的倍福IPC與SIMOTION運動控制器的通信配置進行研究,并通過試驗驗證了配置的正確性,希望能夠為其他自動化人員應用這2 種通信協議提供參考。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
少先隊活動(2021年4期)2021-07-23 01:46:22
攝影之友(影像視覺)(2019年3期)2019-03-30 01:36:50
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
工業設計(2016年12期)2016-04-16 02:52:00
沈陽醫學院學報(2015年1期)2015-12-27 13:44:40
醫學教育管理(2015年3期)2015-12-01 06:43:16
設備管理與維修(2015年12期)2015-04-09 06:57:00
消費者報道(2014年7期)2014-07-31 11:23:57