基于人工智能技術的客運分流引導機器人的研究
2021-03-16 04:01:04萬鑫興姚自魁韓立剛芮立全
中國新技術新產品 2021年24期
關鍵詞:功能
萬鑫興 姚自魁 韓立剛 芮立全
(中國鐵路蘭州局集團公司銀川車站,寧夏 銀川 750011)
1 客運分流引導機器人需求分析
隨著社會經濟的快速發展,人工智能技術廣泛應用于各個領域,各種類型的機器人也應運而生,例如觀賞型機器人、體力勞動型機器人以及服務型機器人,它們的出現為客運分流引導機器人的研發提供了參考思路[1-3]。客運分流引導機器人必須滿足客運服務的需求:首先,要能解答旅客提出的旅行問題。 其次,要具備自主導航功能,在旅客需要引導幫助時,將旅客引導至目的地。 最后,要對客票和身份進行識別,以便為旅客提供更加溫馨的服務。同時,客運分流引導機器人還需要具備動態測溫的防疫功能。
1.1 語言交流服務
語音交流是重要的客運服務方式,即通過語音廣播傳達旅客最需要了解的旅行信息。車站候車室通常采用廣播對距離當前時間最近的出發列車的車次、檢票口以及站臺等信息進行重復播報。但是這種語音交流方式存在很大的局限性:1) 重復播報的時間是固定且有限的,因為需要重復播報的列車數量較多,所以只有在固定的時間段旅客才能聽到對應的乘車信息。2) 與旅客語音交流的效率很低,因為長時間的重復廣播容易讓旅客的聽覺處于疲憊狀態,所以很容易忽略對自己旅行有效的語音信息。而旅客主動詢問客運員是語音交流中效率較高的一種方式,但也存在一些問題:1) 客運員數量有限,不能及時回復所有問題。2) 因為客運員精神狀態和服務水平存在差異,所以這種客運服務會因人為因素而存在穩定性較差的缺陷。
綜上所述,客運分流引導機器人需要具備以下功能:1) 要具備識別旅客提出的旅行問題的基本功能。2) 要準確地將旅行問題的答案反饋給旅客。3) 要具備內容豐富的語音識別問題庫和回答問題答案庫。
1.2 自主建圖導航服務
車站候車室客運員在部分弱勢群體詢問一些旅行問題(例如在哪里退票、如何找到自己乘車的檢票口以及去哪里尋找衛生間等問題)時,可能需要將旅客引導送至目的地,但由于客運員數量不足和不同客運員的服務耐心、水平不同等因素,因此,容易降低客運服務質量。
綜上所述,客運分流引導機器人需要在識別旅客旅行問題的基礎上,具備將旅客引導至目的地的功能,即具備自主建圖導航的功能。同時,還需要在運動過程中主動避開障礙物,例如其他旅客、候車室座位等。
1.3 客票識別及動態測溫功能
為了可以方便、快速且準確地解答旅客的問題,客運分流引導機器人必須有選擇性地為弱勢群體提供更細心、更周到的引導服務,這就需要通過客票識別和篩選旅客年齡來提供相應的服務。
同時,客運分流引導機器人在閑暇時,能夠不間斷地在候車室的候車椅子間巡航測溫,巡航期間在與旅客交流的同時進行動態測溫,如果發現體溫高于正常溫度的旅客,則發出報警通知防疫人員。
2 機器人設計理念和思路
設計客運分流引導機器人的目的如下:1) 將客運員從重復枯燥的客運服務工作中解放出來,節約客運組織與管理的成本。2) 通過穩定成熟的機器系統給旅客提供更高水平的客運服務。3) 為旅客提供更智能、更美好的旅行體驗。
機器人外觀設計必須具有鐵路文化特色,同時,盡可能地簡化其結構,使機器人實用且新穎。例如客運分流引導機器人在面對不同身高的旅客時,可以自動調節自己的身高;在面對小孩詢問時,回答聲音模仿小孩子的聲音。機器人的結構設計應能夠滿足機器人安裝所有零配件的需求,以實現機器人的所有功能。機器人結構設計如圖1 所示。
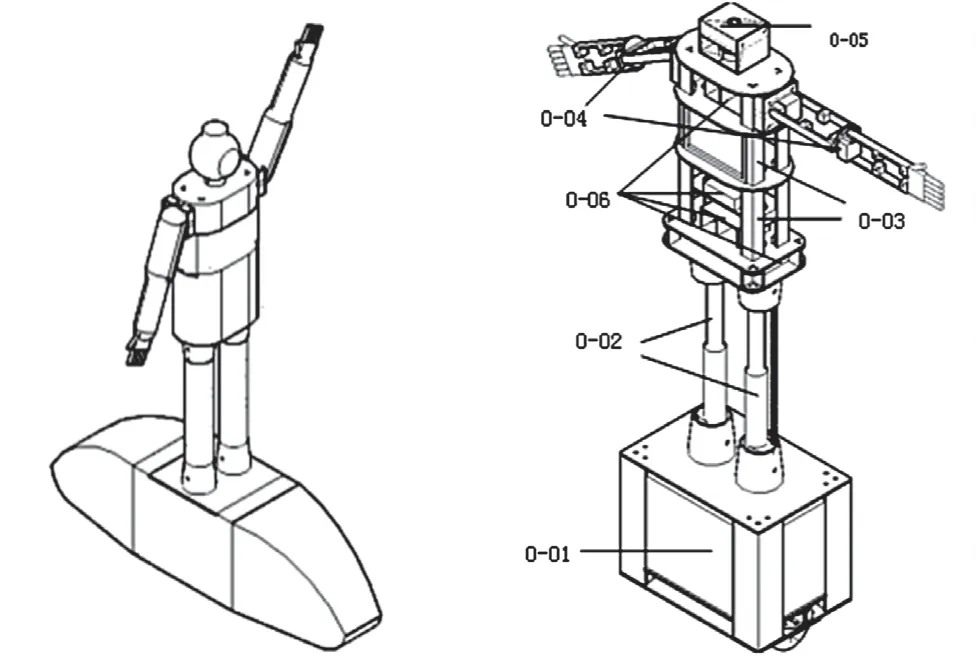
圖1 機器人結構設計圖
3 機器人各種功能的實現
根據設計機器人的思路,客運分流引導機器人必須要滿足其工作的硬件設備條件和軟件控制條件。機器人硬件設備在軟件控制下協調動作,獲取周圍環境信息(主要包括候車室位置信息、旅客語音信息和機器人周邊障礙物信息等),從而智能地做出決策,為旅客提供高質量的客運服務。
3.1 機器人硬件設備功能的實現
3.1.1 走行車的組成及功能
機器人走行車包括走行輪、走行輪固定支座、底層走行板、走行板中心連接架、中層走行板、雙層走行架、上層走行板、電源箱、電源、充電接觸樁、變壓模塊、走行車螺絲連接孔、萬向輪以及走線孔,機器人走行車結構示意圖如圖2 所示。不同于市場上的其他機器人設計結構,因為客運分流引導機器人要長時間、不間斷地工作,對電源儲電量的要求是其他機器人的幾倍,其體積和質量也是其他機器人的幾倍,所以機器人走行車的質量約占機器人總質量的90%,這樣就極大地降低了機器人整體的重心,使機器人很難被推倒,更加適合在人多的候車室工作。
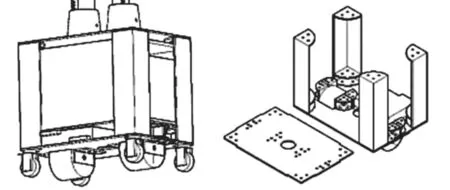
圖2 機器人走行車結構設計圖
首先,走行車可以輔助機器人向前、后、左以及右平穩地運行,通過2 個帶編碼器的伺服輪對和4 個萬向輪承載整個機器人的質量,并通過它們實現精準運動的功能。其次,走行車主要用于承載電源的質量。最后,走行車上的自動充電裝置能夠自行為機器人充電。
3.1.2 伸縮雙腿的組成及功能
機器人雙腿包括機器人雙腿固定底座、機器人伸縮固定架、機器人伸縮桿、伸縮步進電機、電機驅動、機器人伸縮雙腿、彈簧線路管以及機器人雙腿固定頂座,如圖3 所示。機器人雙腿能夠上下伸縮,以實現改變機器人身高的功能。其工作原理為在電機驅動的控制下,伸縮步進電機轉動的同時帶動齒輪組轉動,絲杠帶動齒輪組轉動,最終帶動機器人伸縮桿上下運動,使機器人雙腿變長或者變短。
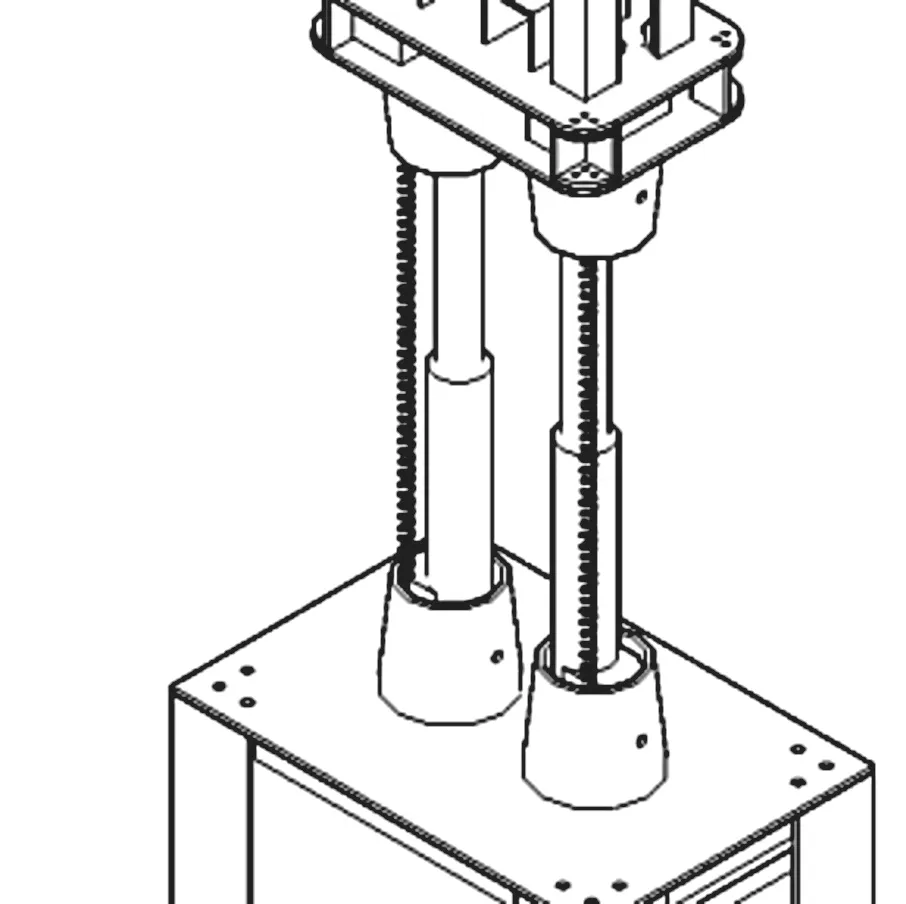
圖3 機器人伸縮雙腿結構設計圖
3.1.3 軀體及頭部的組成和功能
機器人軀體包括軀體固定板、固定板連接架、軀體底板、底板連接架、軀體小隔板、屏幕固定底板、固定底板連接架、屏幕固定頂板、頂板連接架、軀體頂板、手觸操作屏、語音模塊固定板、語音模塊、軀體走線孔以及軀體螺絲連接孔,如圖4 所示。機器人軀體一方面是為了維持機器人外在的人型形象,另一方面是為了安裝機器人控制軟件賴以工作的各種芯片,并利用機器人軀體保護它們。在機器人軀體安裝了控制機器人全身協調運動的核心控制板、機器人運動的驅動板、機器人的語音識別板、機器人語音轉換板、激光雷達轉化板以及手觸操作屏等用于協調控制機器人運動的設備。
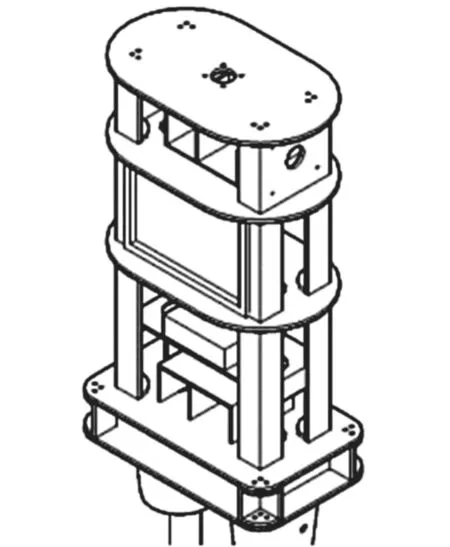
圖4 機器人軀體結構設計圖
機器人頭部包括脖頸、頭部支架、直角固定板、面部屏幕、激光雷達安裝座、語音喇叭安裝座、激光雷達模塊、語音喇叭以及遠距離測溫模塊,如圖5 所示。在機器人頭部安裝了面部屏幕,當語音喇叭發出語音工作時,可以顯示機器人配套的面部表情,使機器人更加生動、形象。機器人頭部的激光雷達模塊是機器人SLAM 自主建圖導航的核心部件,同時也可以用來避開障礙物。遠距離測溫模塊主要在機器人自主巡航時對候車室所有旅客進行動態測溫,從而實現自主防疫的功能。
圖5 機器頭部結構設計圖
3.1.4 雙臂的組成及功能
機器人胳膊包括胳膊固定架、大臂支座、大固定旋轉臂、大動力旋轉臂、大臂連接板、大動力舵機、連接肘關節、小固定旋轉臂、小動力旋轉臂、小臂連接板、動力舵機、橡膠手以及舵機驅動板,如圖6 所示。機器人胳膊固定在機器人軀體上,可以在與旅客交流時展示簡單的肢體語言。機器人胳膊由大臂、小臂以及手組成,機器人的胳膊能夠在舵機驅動板的驅動下控制大動力舵機和動力舵機,從而實現機器人胳膊的運動功能。

圖6 機器胳膊結構設計圖
3.1.5 機器人外殼的組成及功能
機器人外殼包括走行車外殼、機器人雙腿外皮、機器人軀體外皮、機器人胳膊外皮以及機器人頭部外皮,如圖1 所示。走行車外殼兩頭均為動車車頭形狀,能夠包裹固定在機器人走行車外側,走行車外殼兩側均呈流線型,可以在避免機器人走行車被碰撞的同時展示鐵路文化元素。機器人雙腿外皮、機器人軀體外皮、機器人胳膊外皮以及機器人頭部外皮均為橡膠材質,可以避免出現機器人因意外碰撞而被損壞的情況。機器人雙腿外皮擁有足夠的彈性,可以滿足機器人雙腿伸縮時維持美好外觀的需求。機器人胳膊外皮、機器人軀體外皮以及橡膠手能夠粘連在一起。機器人頭部外皮可以維持客運分流引導機器人的美好外觀。此外,還可以在機器人軀體外皮上套裝鐵路制服,模擬客運員的外形。
3.2 機器人軟件控制功能的實現
3.2.1 語音交流功能的實現
語音交流功能的實現必須依賴于語音識別模塊、語音喇叭、核心板以及語音轉換板4 類硬件設備。即通過語音識別模塊來獲取旅客的問詢信息,將獲取的信息傳輸給核心板進行處理運算,通過分析旅客的詢問信息,智能匹配對應“語音數據庫”中的問題及解答語音,并通過語音喇叭解答旅客的詢問。
在分析旅客需要的引導服務時,提示旅客進行客票識別操作,即將身份證放在手觸操作屏的識別區域,根據身份信息及圖像識別功能等綜合判斷旅客是否屬于弱勢群體,再決定是否給予引導服務。確定旅客屬于弱勢群體后,通過語音信息轉化板將旅客提供的位置信息轉化為控制驅動板的運動信息,從而實現將旅客引導至目的地的功能。
機器人的語音數據庫是機器人處理核心通過局域網即時獲取的動態數據庫,一部分來自車站的接發列車即時信息庫,另一部分來自客運員人工動態維護增加的語音數據庫。這種提前為系統準備識別問題和對應解答語音的方法可以實現機器人單機自主服務運行的功能,無須聯網運行。它的優點在于機器人在運行時無須連接互聯網,在避免網絡安全風險的同時節省了電信網絡服務的成本。
3.2.2 SLAM 自主建圖導航功能
客運分流引導機器人的設計采用單機方案,即1 臺機器人自成1 套獨立系統,無須連接互聯網。因為使用互聯網不僅會增加機器人的使用成本,使機器人的設計變得更加復雜、不便維護;而且鐵路候車室距離鐵路線路較近,鐵路線路附近的接觸網具有高壓電,高壓電的電流變化也跟隨其負載的變化而不斷變化,最終嚴重影響互聯網信號的傳播。客運分流引導機器人不論采用GPS 定位導航,還是更加精準的北斗定位導航,都會在工作中因信號傳輸中斷而導致機器人工作出現不穩定的現象。
因此,客運分流引導機器人采用SLAM 自主建圖導航的技術[4-6]實現機器人為旅客提供精準引導服務的功能。首先,客運分流引導機器人需要通過激光雷達模塊充分地對候車室周圍的環境進行掃描和識別,通過激光雷達轉化板和核心板將掃描和識別的區域建成激光雷達模塊能夠識別的地圖,并將該地圖儲存在核心板上。其次,對該地圖上的位置信息進行人工標記和區別處理,對旅客經常想去的關鍵位置信息數據進行提取儲存(備用)。當旅客通過語音模塊或手觸操作屏將需要引導地點告知機器人系統時,對比之前提取的關鍵位置信息數據,將該數據傳輸給機器人驅動板,驅動板控制走行車運動。在運動過程中,激光雷達模塊不斷掃描候車室周圍環境并與事先建好的地圖數據進行對比,逐漸靠近關鍵位置信息的目標數據,直到與關鍵位置信息的目標數據值重合為止。最后,到達目的地,導航任務結束,機器人胳膊作出簡單的肢體動作,并通過語音喇叭告知旅客已到達目的地。
因為激光雷達的測距精度很高,所以采用激光雷達模塊自主建圖導航的精確度也非常高。但是激光雷達導航對候車室周圍物體環境的依賴非常強,除運動中的旅客外,候車室其他物體位置的變化都會影響導航的準確性。
3.2.3 圖像識別及動態測溫功能的實現
機器人圖像識別主要分2 種情況:1) 為了更方便地為旅客提供客運服務,即身份證客票識別,機器人根據讀出的客票信息主動提示旅客去哪個檢票口、哪個站臺乘坐列車。2) 當旅客提出為其提供引導服務時,機器人判斷其是否滿足弱勢群體條件,是否能為其提供引導服務,避免出現浪費客運服務資源的現象。這種圖像識別主要通過手觸操作屏上的攝像頭獲取旅客外貌特征等信息,然后根據身份證年齡進行人群篩選。
動態測溫功能是機器人在候車室自主巡航時,通過安裝在機器人頭部的遠距離測溫模塊來實現的。遠距離測溫模塊能夠快速對周圍3 m 內的所有人或物體進行測溫,即在機器人運動巡航的過程中進行持續測溫,實現動態防疫的功能,同時也能夠動態發現一些潛在的火災隱患。在發現發熱旅客后,遠距離測溫模塊發出警告,將該信息反饋給機器人核心板,機器人核心板通過無線網絡將信息快速反饋給客運總控室,啟動人工隔離疏散應急流程。
3.2.4 機器人軟件編程控制的實現
因為ROS 系統功能包[7]中包括足夠豐富的功能包集合,且其屬于開源功能包,能夠滿足客運分流引導機器人的研發需求。所以該控制系統首先在樹莓派4B+8G 的高配開發板安裝了Ubuntu 軟件庫,并配置了ROS 機器人系統。其次,對客運分流引導機器人的走行驅動板、胳膊驅動板、激光雷達模塊以及語音識別模塊等傳感進行個性化系統配置。例如使用代碼安裝伺服電機所需的功能包和驅動程序,代碼如下。

在對該控制系統進行配置時,可以使用安裝Ubuntu 的虛擬機或實體計算機對其進行操作配置,具體方法如下:采用Wi-Fi 連接同一路由器的網絡,通過配置IP 地址的方法達到計算機對機器人控制系統進行遠程操控和資源配置的目的。最后,使用Python 編程語言對不同硬件進行協調控制,例如,協調語音控制與自主導航之間的邏輯控制關系,即語音識別模塊在識別關鍵位置信息時發送信息指令,以操控自主導航模塊完成動作[8]。
4 結語
該文分析了客運分流引導機器人的研發需求,介紹了客運分流引導機器人的硬件構成和軟件工作原理。通過介紹客運分流引導機器人的各項功能論證了客運分流引導機器人具有節約客運組織成本、提升客運服務質量以及提升旅客旅行體驗的優勢,能夠促進鐵路客運服務朝高質量方向發展。
此外,該機器人采用單機控制模式,避免了因采用互聯網終端在鐵路車站控制機器人而引起的信號傳輸不穩定的缺陷,同時也節約了維護互聯網的費用。目前,國內外鐵路車站尚未出現類似的服務型機器人,客運分流引導機器人的研究對后續類似機器人的研發具有較高的參考價值。
猜你喜歡
鐘表(2023年5期)2023-10-27 04:20:44
中華詩詞(2022年6期)2022-12-31 06:41:24
當代陜西(2021年21期)2022-01-19 02:00:26
中學生數理化(高中版.高考數學)(2020年1期)2020-02-20 13:23:44
經濟技術協作信息(2018年11期)2019-01-14 03:07:20
中國科技論壇(2017年7期)2017-07-25 08:49:53
制造技術與機床(2017年3期)2017-06-23 08:11:33
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:32:55