基于迭代學習干擾觀測器的RLV容錯控制方法
2021-03-15 03:08:36陳佳曄王紫揚
中國慣性技術學報 2021年6期
陳佳曄,王紫揚,陳 益,張 群,張 亮
(1. 北京宇航系統工程研究所,北京 100076)(2. 中山大學航空航天學院,廣州 510275)
處于再入段的重復使用運載器(Reusable Launch Vehicle, RLV)從100公里左右空氣稀薄的高空,飛至10公里的稠密大氣中,外部環境變化大,且速度變化大,在進行運載器再入段控制系統設計時,需要對外界環境帶來的干擾以及數學建模過程中帶來的不確定性進行充分考慮,同時,由于外界條件惡劣而引發執行機構故障導致對系統的干擾也需進行充分考慮。為了使執行機構故障狀態下的控制系統仍能具有較好的穩態性能,精確地實現指令跟蹤[1],容錯控制方法成為再入飛行器姿態控制系統所需研究的重點。
容錯控制在近些年來一直是廣大學者在姿態控制設計相關領域的研究熱點,魯棒控制方法是容錯控制算法的一個重要分支,主要包括調度增益[2]、H∞、自適應控制方法[3]、偽逆方法[4]、非線性動態逆控制[5]、基于模型預測的控制方法[6]等。但目前該分支的容錯控制方法只能證明其漸進穩定性,而不能保證控制系統的收斂時間。
現代控制方法中,變結構控制方法(也叫滑模控制方法)具有控制精度高,對擾動變化不靈敏,容錯性強等特點,同時通過對其形式的設計保證收斂時間。文獻[7]通過將滑模控制及自適應控制相結合的方法,取得了較好的控制效果;文獻[8]中將滑模方法與非線性干擾觀測器相結合,保證再入空間飛行器在系統中存在類反斜線回滯特性的干擾時,具有較好的跟蹤效果。但目前大部分滑模控制方法結合的觀測器都只針對某種特定形式的干擾進行觀測和補償,當系統中存在多種綜合不規則擾動時,控制精度會下降,容錯性能較差。同時,滑模控制方法由于在滑模面穿越的特性導致系統中存在抖動問題,使控制性能下降。
本文針對已有方法的不足,針對RLV再入飛行階段提出了一種基于狀態觀測器的容錯控制系統,通過基于S型函數的迭代學習干擾觀測器,對包括建模不確定性、外部環境干擾以及執行機構故障引入干擾組成的綜合擾動進行估計并補償,并在此基礎上設計有限時間收斂自適應控制算法,保證系統收斂時間,同時能夠有效抑制抖振。首先,本文根據RLV再入飛行段姿態動力學模型、執行機構故障模型,建立帶執行機構故障的面向控制系統的數學模型,然后設計基于迭代學習干擾觀測器的有限時間收斂自適應控制器,并根據李雅普諾夫穩定性定理證明系統穩定性,最后,對某再入飛行器進行仿真分析,驗證所提出的容錯控制方法的有效性。
1 RLV姿態動力學模型
1.1 RLV數學模型
RLV再入飛行階段的3-DOF姿態控制轉動方程如下:

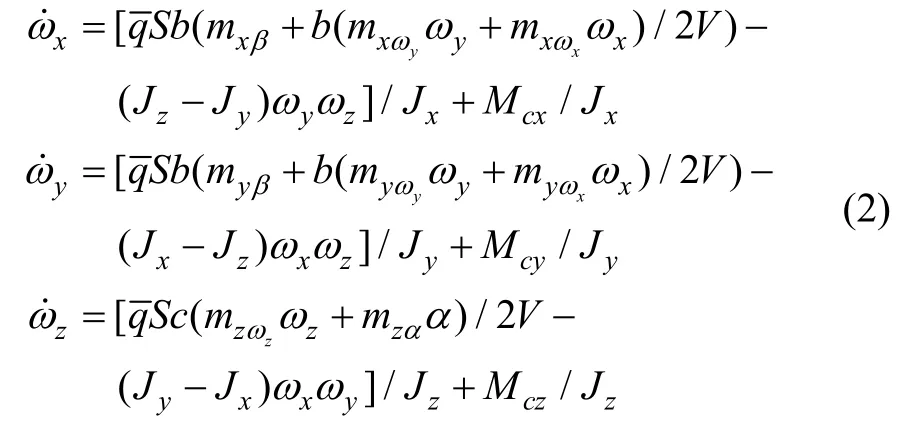
式中,α、β、γ分別表示運載器的攻角、側滑角以及滾動角;ωx、ωy、ωz分別表示運載器的滾動角速度、偏航角速度以及俯仰角速度;φ、ψ、θ、ψV和γV分別表示運載器的俯仰角、偏航角、彈道傾角、彈道偏角以及傾斜角;G用于表示地球引力;表示動壓;S表示航天器特征參考面積;Jx、Jy、Jz分別表示繞RLV本體坐標系下三坐標軸的轉動慣量;Mcx、Mcy、Mcz分別表示執行機構(包括氣動舵和微型火箭發動機)所產生的控制力矩;Cyα、Czβ、mxωy、mxωx、mxβ、myβ、mzωz、mzα分別表示力、力矩系數。通過流體動力學軟件CFD模擬獲取氣動力、氣動力矩系數,具體獲取方式見文獻[9]。
將上述RLV動力學模型整理得如下面向控制系統模型:

式中,Ω=[α,β,γ]T用于表示運載器姿態控制量,ω=[ωx,ωy,ωz]T表示姿態角速度,RLV三軸控制力矩用M=[Mcx,Mcy,Mcz]T表示,用Δf表示建模過程中簡化而引入的通道間耦合不確定性,用Δd表示外部環境帶來的干擾力矩,轉化過程中出現的系數矩陣R、J0、Φ分別如下所示:

RLV再入段姿態控制系統通過調整控制力、控制力矩的方式實現對期望姿態指令的跟蹤,即Ω、ω分別能夠跟蹤姿態指令Ωd、ωd。
1.2 帶有執行機構故障的RLV數學模型
RLV再入段指的是飛行器以高速沖入大氣層過程,當處于大氣層外時,大氣稀薄,RCS工作效率高,控制力矩主要依賴RCS提供;隨著飛行時間推移,當進入大氣層內時,大氣逐漸變得稠密,氣動舵面控制效率升高,作為產生姿態控制力矩的主要來源。氣動操縱面主要由方向舵面、阻力板、升降舵面、體襟翼以及副翼構成,當體襟翼與副翼翻轉向同一方向時,完成俯仰控制,除此之外,阻力板也參與俯仰控制;當副翼差動翻轉時,實現滾動控制;偏航方向由方向舵面進行控制。
由外界環境導致氣動操縱面易發生的故障分為如下幾類:操縱舵面卡死類故障、操縱舵面部分失效類故障以及操縱舵面漂移類故障;RCS主要存在常開或常閉兩種故障類型。下面介紹不同故障類型特性,并針對不同故障特性進行建模。
(1)操縱舵面卡死類故障
操縱面卡死類故障主要表現為:當控制指令發出后,操縱舵面保持上一指令翻轉位置,無法執行當前指令。氣動操縱面卡死的數學描述為輸出常值控制力矩,假設第i個故障操縱面的實際輸出值δiout的數學模型為:

式中,const為一常值,用于表示故障操縱面卡死的程度,操縱舵面卡死的輸出上下界范圍為:

式中,δimin表示操縱面輸出最小值,δimax表示操縱面能夠輸出最大控制力矩。
(2)操縱面部分失效類故障
操縱面部分失效類故障的表現為:接收到翻轉指令后,操縱舵面實際翻轉值較翻轉指令增益降低,導致控制效率減小。若操縱面i發生部分失效故障,其數學模型為:

式中,ki表示舵面失效系數,表示該操縱面未發生故障;ki=0表示該操縱面存在松浮現象。
(3)操縱面漂移類故障
操縱面漂移類故障的表現為:當接收到翻轉指令后,操作面輸出力矩在標稱值附近產生無規則隨機漂移。氣動操縱面的輸出在標稱值附近產生隨機漂移。若操縱面i發生漂移故障,其數學模型為:

式中,Δi為隨機漂移常數。
(4)RCS故障
RCS為微型火箭發動機,發生故障后的現象為無法關閉或打開,從而產生推力不變,數學模型為:

綜合以上執行機構的故障數學模型,可得故障情況下執行機構控制力矩輸出數學模型為:

式中,M為執行機構產生的力矩。用κ=[κ1,κ2,κ3]T表示執行機構故障導致的失效系數,其中參數滿足0 ≤κi≤1。δ為執行機構接收到的翻轉指令。用Δ表示漂移類加性故障。
則可推導出存在執行機構故障的面向控制系統模型:

定義跟蹤誤差:

簡化得:

2 基于迭代學習觀測器的自適應有限時間收斂控制器設計
2.1 基于Sigmoid的迭代學習觀測器設計
設計迭代學習觀測器如式(13)所示,用于估計執行機構故障、外界環境干擾等帶來的綜合偏差:

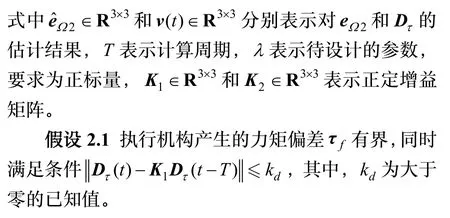
定理2.1針對控制系統(式(10)),如果迭代學習觀測器設計為式(13)形式,在滿足假設2.1的情況下,若觀測器增益設計滿足條件:

式中,γ4為下文證明過程中產生的設計參數,為大于零常值,α1、δ分別代表推導過程中待設計變量,均為大于零的常值,則對力矩偏差、角速度的估計誤差將分別收斂。
證明:對干擾估計的誤差如下:

將對eΩ2(t)估計誤差定義為如下形式:

記f(t) =Dτ(t) -K1Dτ(t-T),則式(15)可改寫為:

已知K1、K2均正定,則:

根據楊氏不等式,有:
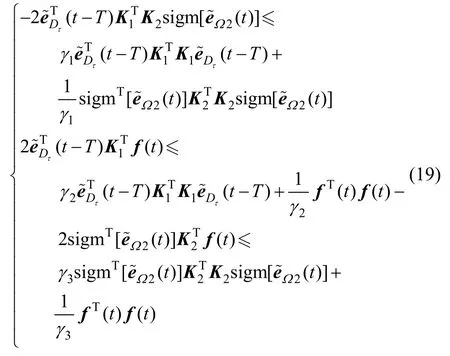
式中,γ1、γ2和γ3為楊氏不等式待設計參數,均大于零。代入式(19)可得:
其 中 參 數α1=1+γ1+γ2,α2=1+ 1/γ1+γ3,α3=1+ 1/γ2+ 1/γ3,均大于零。

選取Lyapunov函數:

將V1對時間求導,同時將式(21)代入,根據楊氏不等式,可得:
代入式(20)整理可得:


2.2 自適應有限時間收斂控制器設計
在設計控制器之前,為鋪墊后續證明過程,先介紹以下引理。
引理2.1控制系統設計為式(12)形式,若存在Lyapunov函數V滿足:(1)V(x) = 0 →x= 0;(2)對任意x(t)均滿足:

式中,p、q為大于零的奇數,滿足p<q,Tc>0,則該控制系統在有限時間內能夠穩定,且該時間滿足:

證明:將寫為dV/dt形式,則式(27)可轉化為如下形式:
記U=Vq/p,則可得:

進一步處理不等式左側,得:
化簡上式:

對式(33)兩側同時積分,并將U、u、v代入可得:

至此得證。
下面介紹自適應有限時間收斂控制器設計:
針對控制模型(式(12)),設計滑模面如下:
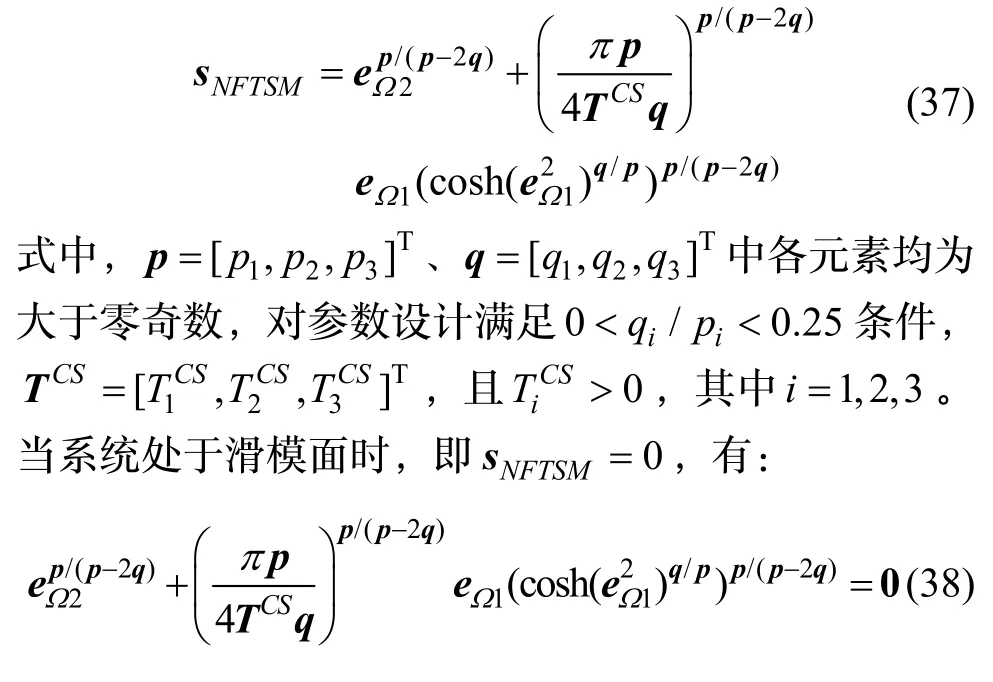
代入式(12)得:

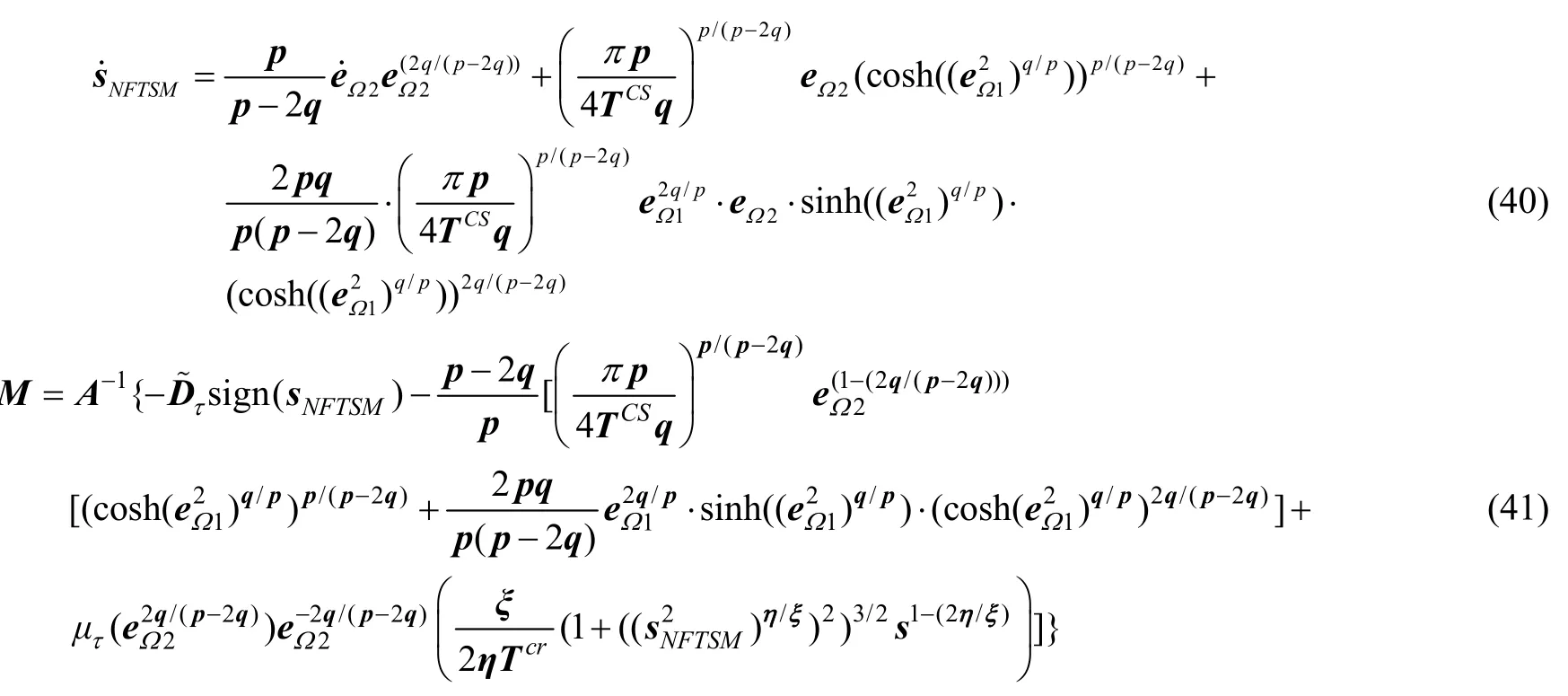
對滑模面求導得式(40),根據滑模面形式,設計如式(41)所示的滑模控制律,其中η=[η1,η2,η3]T,ξ=[ξ1,ξ2,ξ3]T中各元素均為大于零奇數,并且對參數設計滿足0 <ηi/ξi< 0.5,其中i=1,2,3,為迭代學習觀測器估計值,中各元素均為正。
定理2.2針對控制系統(式(12)),將控制律設計如式(41),則能夠保證控制系統全局穩定,且穩定時間滿足式(42)。
證明:選取李雅普諾夫函數形式為求該函數對時間的導數,并將式(40)代入,得式(43),將式(12)代入式(43),可得式(44)。
在以上推導過程中可發現,系統能夠保證李雅普諾夫函數對時間的導數一直滿足0。再由引理2.1,在Tcr時間內,控制系統可收斂并保持穩定。
在式(39)兩邊同時乘以2eΩ1可得:

定義古德曼函數(Gudermannian function)gd(x)的形式為即gd (x) =sin-1(tanhx)。根據d(gd (x) ) =dx/cosh(x),式(47)可改寫為:

對上式兩邊積分,可得:
綜上所述,將滑模面設計為式(37),控制律設計為式(41),則控制系統能夠在任意初始狀態情況下,在有限時間T(Ω) ≤Tcr+Tcs內收斂穩定。至此得證。
3 仿真分析
針對第2章節設計的控制系統,以某型RLV為仿真模型,設置以下兩種仿真工況進行仿真驗證。
觀測器參數如表1所示。
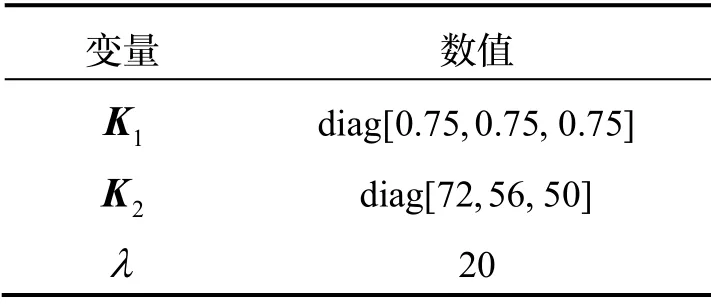
表1 觀測器設置參數Tab.1 Parameters of observer
控制器參數如表2所示。
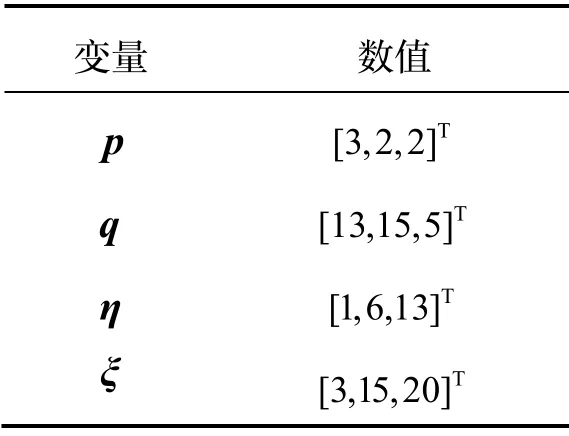
表2 控制器參數Tab.2 Parameters of controller
仿真工況1:仿真結果如圖1-圖5所示。圖中SILO+AFSMC代表本文提出的基于迭代學習干擾觀測器的容錯控制方法。
通過圖1-圖4可以看出,未發生故障時,三通道穩態誤差在0.01 °以內,角速度跟蹤曲線平滑,穩態誤差小,控制力矩平穩,在70 s時發生控制執行機構的切換,產生較大控制力矩,在190 s系統中發生故障時,三個姿態通道發生抖動,在1.5 s內能夠恢復穩定,三個通道出現的姿態最大跟蹤誤差為[0.3928°0.4059°0.4039°],最終穩態誤差能夠收斂到0.01 °以內,跟蹤角速度和控制力矩出現的抖振能夠在1.5 s內恢復穩定,魯棒性較好,通過圖5可以看出速度曲線平滑,幾乎無抖動情況發生。
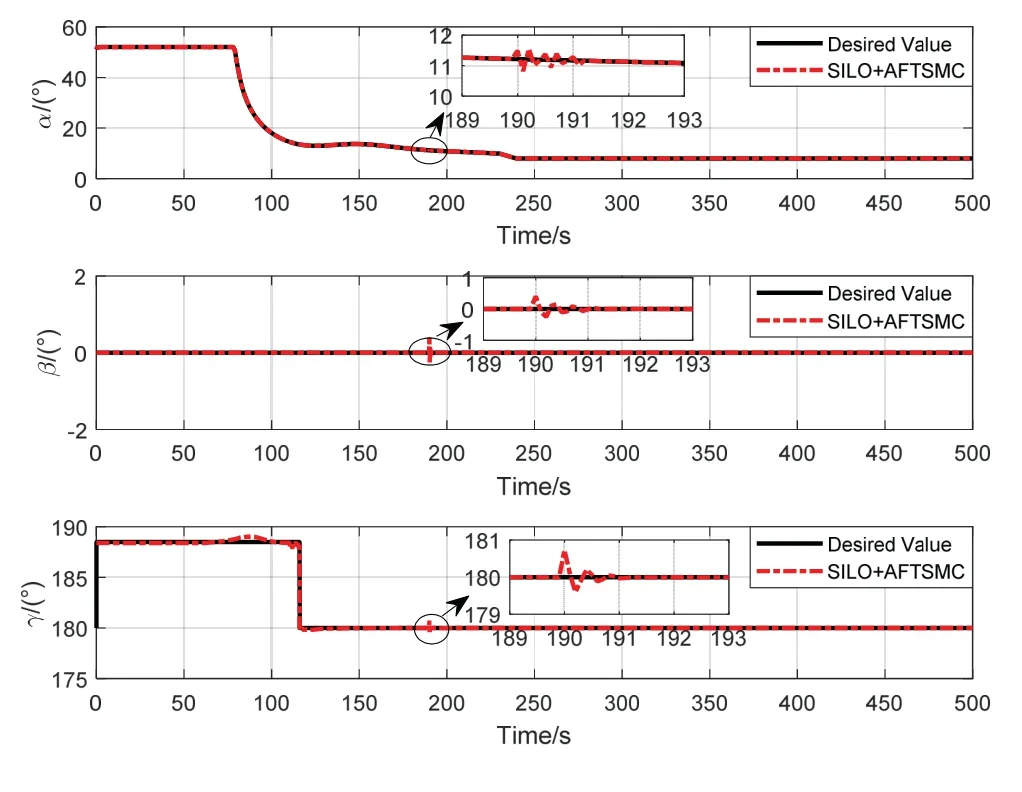
圖1 仿真工況1姿態角曲線Fig.1 Attitude track curve of case 1

圖2 仿真工況1姿態角跟蹤誤差Fig.2 Attitude track error curve of case 1
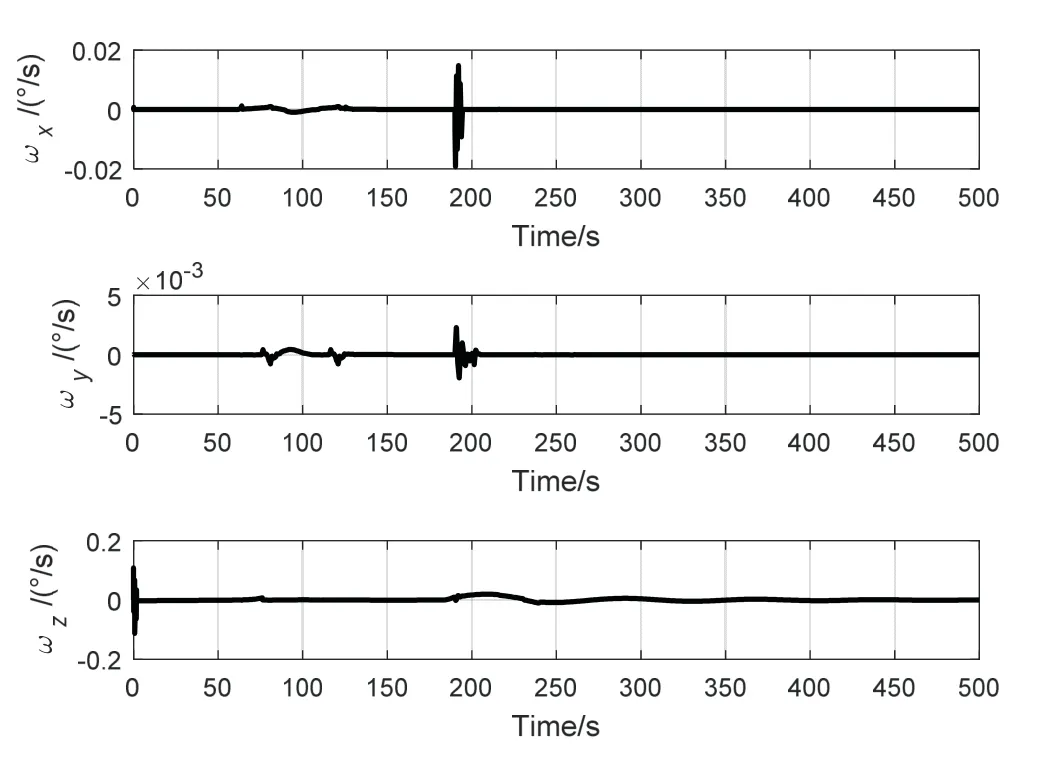
圖3 仿真工況1角速度曲線Fig.3 Angular velocity curve of case 1
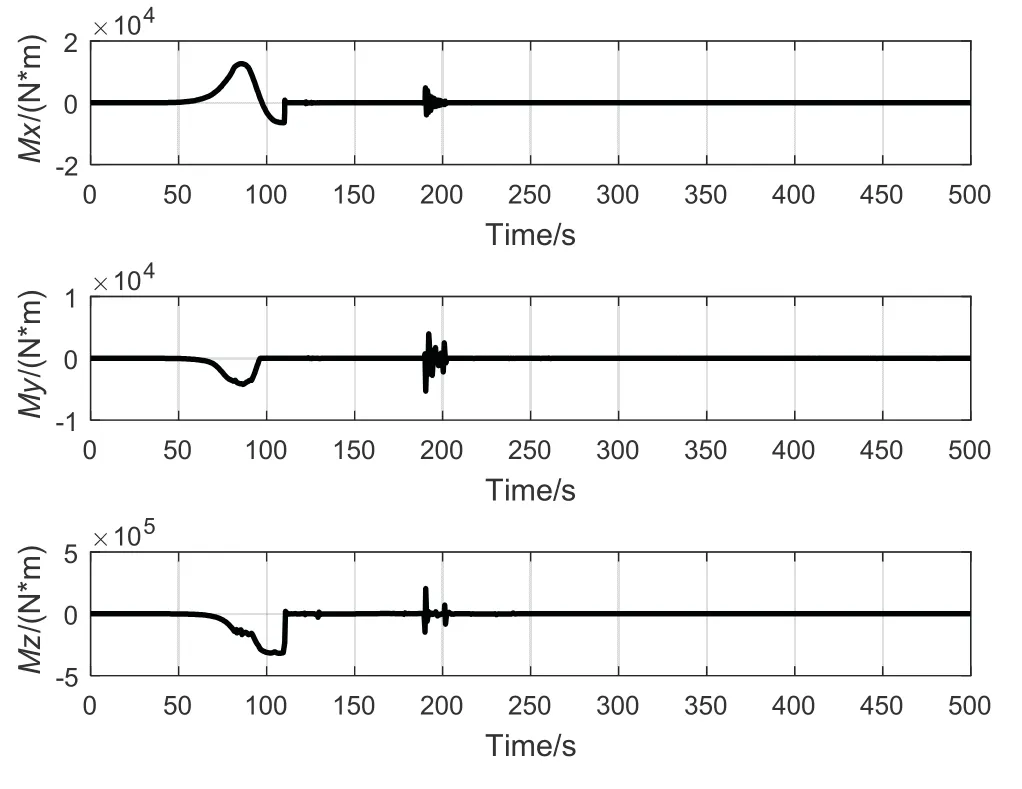
圖4 仿真工況1控制力矩曲線Fig.4 Control moment curve of case 1

圖5 仿真工況1速度曲線Fig.5 Velocity curve of case 1
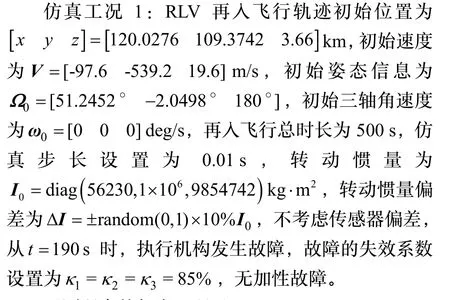
仿真工況2:RLV其他工況與工況1相同,t=190s時,執行機構故障的失效系數為κ1=κ2=κ3=85%,系統中執行機構漂移類加性故障為Δ= 104+ 4.5×104cos(0.5πt)N·m,仿真結果如圖6-圖10所示。

圖6 仿真工況2姿態角曲線Fig.6 Attitude track curve of case 2
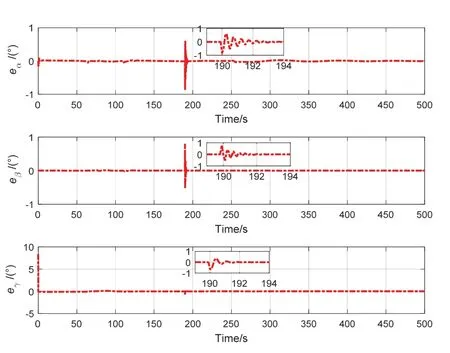
圖7 仿真工況2姿態角偏差曲線Fig.7 Attitude track error curve of case 2

圖8 仿真工況2角速度曲線Fig.8 Angular velocity curve of case 2
通過圖6-圖9可以看出,在190 s系統發生故障時,三個姿態通道發生抖動,在3 s內能夠恢復穩定,三個通道出現的姿態最大跟蹤誤差為[0.8738° 0.8°0.6637°],最終穩態誤差能夠收斂到0.01 °以內,跟蹤角速度和控制力矩出現的抖振夠在1.5 s內恢復穩定,魯棒性較好,通過圖10可以看出速度曲線平滑,幾乎無抖動情況發生。
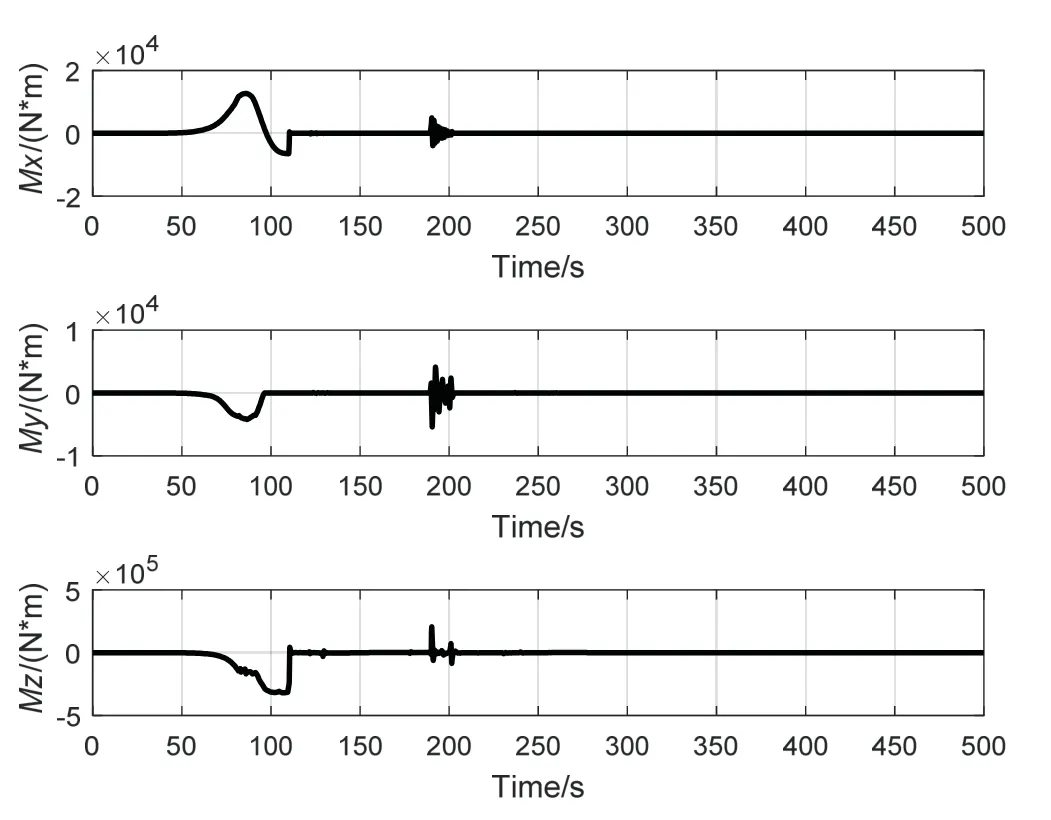
圖9 仿真工況2控制力矩曲線Fig.9 Control moment curve of case 2

圖10 仿真工況2速度曲線Fig.10 Velocity curve of case 2
4 結 論
本文針對RLV再入段控制系統受由外部環境干擾、模型不確定性、執行機構故障組成的綜合干擾影響較大的問題,對容錯控制算法進行了研究,提出了一種改進的迭代學習干擾觀測器設計方法,并基于該觀測器設計了有限時間收斂的自適應控制方法,采用李雅普諾夫直接法對系統穩定性完成證明,選取某型RLV再入飛行段進行仿真分析,驗證了該控制算法在系統中存在執行機構故障情況下具有抖動小、收斂速度快、穩態誤差小的特點,魯棒性良好,有效地處理了RLV系統中綜合干擾影響。后續可對滑模面進一步改進,減小抖動幅度,或將迭代學習干擾觀測器與其他控制算法相結合,改善由滑模控制算法帶來的原理上的抖動問題。
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
汽車維修與保養(2019年7期)2020-01-06 03:30:42
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34