基于有源RFID的野生動物監管系統設計
2021-03-13 08:27:00夏瑞學
智能物聯技術 2021年4期
周 麗,劉 凱,夏瑞學
(1.浙江海康科技有限公司,浙江 杭州 310012;2.中電海康集團有限公司,浙江 杭州 311100)
0 引言
近期,杭州野生動物世界三只金錢豹出逃事件,給周邊居民帶來了一定的安全威脅,也在社會上造成了極大的影響。如何有效加強野生動物監管,保障公共安全,成為了社會各界尤其是相關管理部門關注的熱點和焦點問題。本文基于RFID和NBIoT等物聯網技術,設計一套使用壽命長、定位范圍廣、實用性較強的野生動物監管系統,實現了野生動物廣域范圍上的定位跟蹤、電子圍欄以及運動檢測等功能,尤其在應對突發事件時能夠做到實時告警、精準定位,有效降低人力、物力投入,提高事件處理效率,最大限度保證了野生動物監管的有效性。
1 系統整體結構
系統整體分為感知設備、電磁周界設備以及后臺服務三個部分,其中以感知設備有源RFID為核心,為野生動物定制特殊的項圈等裝置。有源RFID集成了125kHz電磁感應技術,通過在特定區域布設電磁周界設備,實現了精確的區域邊界管理。標簽通過對邊界區域的感知,實現準確的進出區域判斷,當標簽檢測到已離開規定區域,將觸發越界告警。與此同時,北斗定位開啟,將告警信息以及周界外定位信息通過NB-IoT上傳至管理平臺,推送至相關責任主體部門。最后通過無人機機載閱讀器以及手持終端設備實現對目標的精確定位和查找。系統整體框架設計如圖1所示。

圖1 系統框圖Figure 1 System block diagram
2 系統硬件設計
2.1 電磁周界設備
電磁周界設備主要功能是為有源標簽提供邊界清晰和周期性的電磁觸發信號,其中125kHz信號電磁邊界精度在30cm以內。硬件主要包含電源、主控電路、低頻125kHz全橋驅動電路以及相關網絡硬件接口等。
2.2有源RFID標簽設計
標簽硬件主要包括MCU最小系統、定位模塊、數據傳輸模塊、電磁感應、三軸加速度傳感器、電池充電管理等部分。標簽硬件整體框圖如圖2所示。

圖2 標簽硬件整體框圖Figure 2 Overall block diagram of label hardware
主控采用nRF52840 SoC芯片。該芯片支持超低功耗、集成射頻前端的藍牙芯片,具有2路串口、4路SPI等資源,外圍僅需要搭配阻容復位電路和32MHz晶振即完成該SoC的最小系統。
定位模塊采用華大HD8020模組,全新的CYNOSURE II架構,使得HD8020即使在密集的城市峽谷也可以實現無縫定位,定位時間較短,并提供優良的續航能力,定位精度小于10m,支持熱啟動模式,在熱啟動狀態下定位時間小于5s。
鑒于目前運營商2G逐步開始退網,而NB-IoT窄帶物聯網具有廣覆蓋、海量接入、低功耗、低成本優勢,因此數據傳輸模塊采用移遠BC26模塊。其內部集成了MQTT、LWM2M協議,可以方便終端接入各種物聯網中間件平臺。
電磁感應采用分立器件搭建,主要包含低頻LC選頻電路、信號整形放大電路、二極管檢波電路等。得到基帶信號,通過相應的解碼算法獲取空中喚醒信號原始數據,并根據預設條件判定是否需要相應動作,如喚醒、模式修改等。
3 系統軟件設計
3.1 電磁激勵功能設計
作為電磁周界設備的主要功能,周期性觸發125kHz載波、曼切斯特編碼數據發送。其中125kHz空中接口協議包含前導碼、起始位、設備編號、線圈位置編號、校驗、終止位等信息,詳細如圖3所示。

圖3 125kHz空中接口協議Figure 3 125kHz air interface protocol
系統啟動后完成硬件接口初始化,包括帶死區控制的互補雙通道125kHz PWM調制、定時器、IO等,并從內部Flash中讀取設備ID信息以及線圈配置信息,對設備、線圈信息、校驗進行曼切斯特編碼,并將編碼信息轉換成時間編碼。在激勵周期到達時,啟動定時器,按照時間編碼控制PWM的剎車引腳,從而完成基帶曼切斯特編碼數據的125kHz載波調制,通過PWM信號控制全橋驅動電路,從而實現125kHz電磁信號的周期性發射。電磁周界設備電磁激勵功能軟件流程圖如圖4所示。

圖4 電磁周界設備電磁激勵功能軟件流程圖a)主流程;b)中斷流程Figure 4 Software flow chart of electromagnetic excitation function for electromagnetic perimeter equipment a)Main flow;b)Interrupt flow
3.2 有源RFID功能設計
有源RFID標簽包含了iBeacon、電磁周界、運動狀態感知、北斗定位、NB傳輸等功能。其軟件主流程在設備啟動后,首先完成系統初始化并輪詢遍歷各子任務判斷是否需要執行,其中電磁感應喚醒由中斷完成。系統軟件流程框圖如圖5所示。
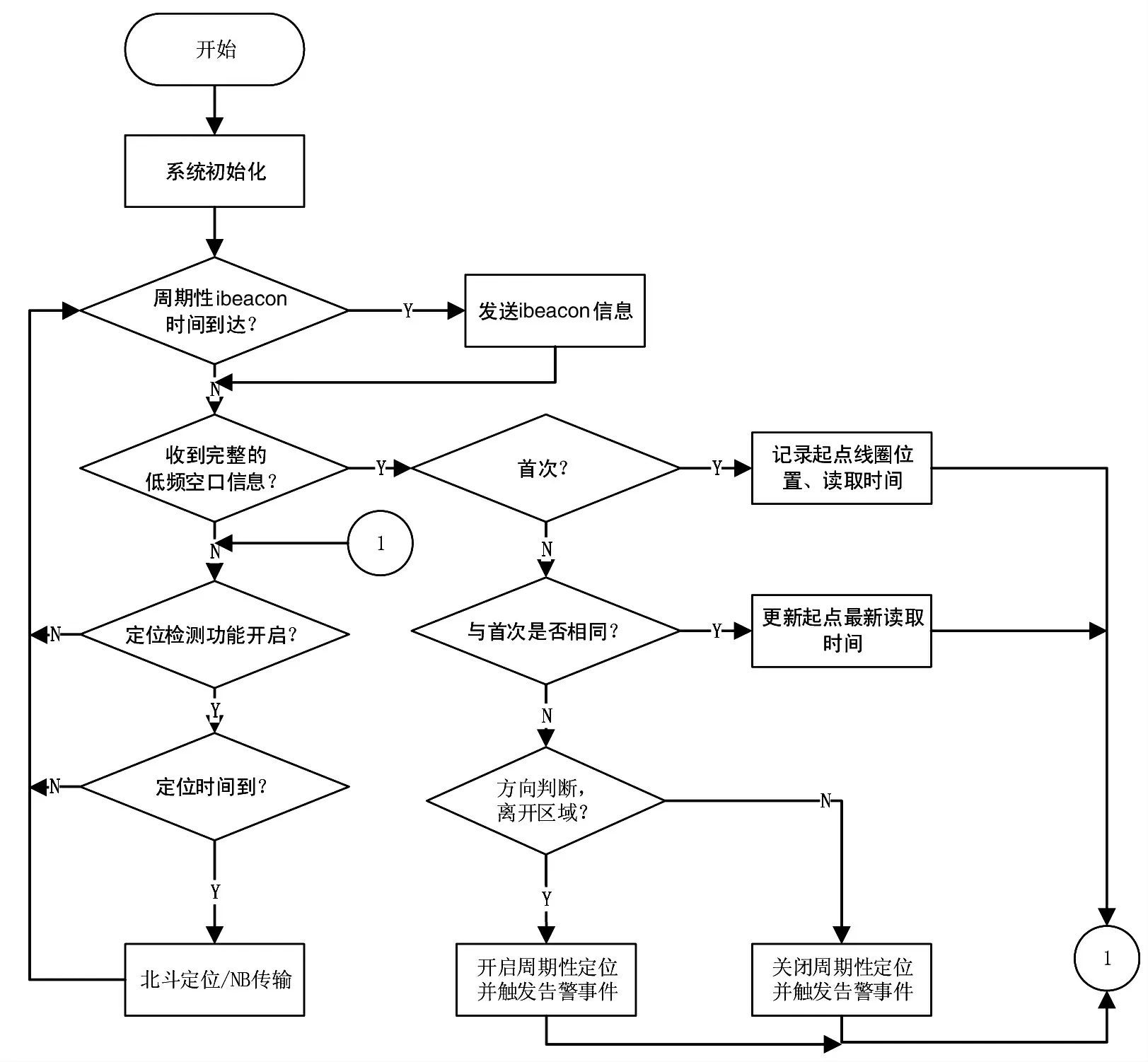
圖5 有源標簽軟件流程圖Figure 5 Active label software flow chart
3.2.1 電磁周界功能
通過IO中斷,實現低頻曼切斯特數據解碼,并在獲取到完整低頻空口信息后,記錄觸發設備ID及線圈信息并開始計時。在超時前,收到了同一設備ID不同天線的觸發信息,開始進行數據分析。其中根據線圈先后到達順序即可感知標簽是否離開相應區域。若離開管理區域則觸發告警,通過NBIoT將設備ID、離開/進入信息、時間等發送至服務器并觸發開啟北斗定位、運動檢測等功能。
3.2.2 運動檢測功能
由于動物運動時,加速度信息會呈現規律性變化,而靜止休息時,基本加速度模值等于重力加速度,因此通過監控加速度的變化信息可以實現對動物運動狀態的檢測,并根據不同的狀態動態調整定位間隔,從而實現定位精細度和功耗的最佳平衡。
在標簽觸發開啟北斗定位后,相應運動檢測功能也隨之開啟。設計將三軸加速度傳感器SC7A20的數據輸出率ODR(Output Data Rate)設置為20Hz,并啟用內部數據緩沖區,通過連續采樣動物加速度信息,并對模值進行滑動均值濾波,來跟蹤動物加速度變化趨勢,通過對加速度特征提取完成運動狀態檢測。其中判決門限根據緩存多組加速度值計算中值并作補償得到,當加速度超過門限閾值則進行峰值檢測。當連續檢測到10次有效峰值,則認定處于運動狀態;當5秒內未出現有效峰值,則認定為靜止狀態。運動監測流程如圖6所示。流程回到①所示位置

圖6 運動監測流程Figure 6 Exercise monitoring process
4 結語
在監管區域內標簽只周期性發送iBeacon信息,從而實現了極低功耗,平均功耗在10μA以下。在500mAh電池容量下,如果未觸發周界告警、北斗定位功能,考慮20%電池自損情況下,設備可以正常工作約4.56年,在此模式下可以通過無人機實現動物定期盤點。在野生動物逃脫后,觸發北斗定位及NB-IoT傳輸等,可以在廣域范圍上對動物進行追蹤定位。由于定位非時間連續,動物位置存在滯后性,在北斗定位到大致位置后,通過無人機巡檢iBeacon信息,將范圍縮小至200m范圍內,最終通過定向手持設備實現準確定位查找。通過此設計,可以實現野生動物的長時間、廣域范圍上有效監管,尤其在應對突發事件時,可以有效提高處理突發事件的能力,為人民群眾的生命及財產安全提供強有力的保障。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
中華手工(2017年2期)2017-06-06 23:00:31
工業設計(2016年12期)2016-04-16 02:52:00
設備管理與維修(2015年12期)2015-04-09 06:57:00
中外會展(2014年4期)2014-11-27 07:46:46
消費者報道(2014年7期)2014-07-31 11:23:57
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32