滾筒反力式制動檢驗臺動、靜態檢定方式的比較
2021-03-12 13:47:14宿遷市計量測試所
上海計量測試 2021年1期
/宿遷市計量測試所
0 引言
機動車制動性能的好壞關系著車輛行駛的安全,因此,檢驗機動車制動性能的優劣至關重要,機動車制動性能檢測是所有機動車必檢項目之一。RB/T 218-2017《檢驗檢測機構資質認定能力評價 機動車檢驗機構要求》[1]4.4.3a中明確要求:“主要檢驗項目應采用固定式儀器設備對機動車進行儀器設備檢驗”。滾筒反力式制動檢驗臺是檢驗機動車制動性能的計量器具之一,被列入國家強制檢定計量器具目錄。目前該設備檢定工作主要依照2016年6月7日實施的JJG 906-2015《滾筒反力式制動檢驗臺》檢定規程[2]進行(主要項目見表1),2015版檢定規程比2009版主要增加了動態制動力檢定項目等內容。

表1 滾筒反力式制動檢驗臺制動部分檢定項目(部分)
1 滾筒反力式制動檢驗臺動、靜態檢定的比較
1.1 檢定原理的比較[3-4]
按照檢定方式的不同,滾筒反力式制動檢驗臺(以下簡稱制動檢驗臺)分為動態檢定法和靜態檢定法。靜態檢定法由測力杠桿和標準力值傳感器(或標準砝碼)組成,標準力值傳感器(或標準砝碼)通過測力杠桿,將力值按照杠桿比例系數放大,壓在(或拉伸)制動檢驗臺的被測力值傳感器上,被測力值傳感器將力值信號轉換為電壓信號輸出,調理放大后輸出到制動檢驗臺的顯示器上。被測力值傳感器的力值大小與制動檢驗臺滾筒表面制動力的關系為式(1)。

為了保證被測力值傳感器示值誤差檢定的準確,被測力值傳感器與滾筒的電機下端受力點靠近(無受力時不接觸),安裝標準力值傳感器后,力臂杠桿一端連接標準力值傳感器,另一端固定在電機端面爪盤上,當標準力值傳感器(或標準砝碼)通過杠桿直接或間接的方式將力值加載到滾筒端面上時,其下端被測力值傳感器開始受力。
動態檢定法如圖1所示,檢定時將動態力傳感器安裝在車軸上,制動檢驗臺啟動時,動態力傳感器隨著車輪轉動,車輪速度穩定后,將動態力傳感器示值置零。當車輪開始制動時,動態力傳感器隨車輪制動力的大小而變化,動態力傳感器輸出的電壓信號由電路放大濾波后,經A/D轉換成數字信號,傳至高速微處理器,通過無線網絡發送到上位機。上位機根據采集到的動態力傳感器信號,繪出制動力曲線并計算出最大制動力。理論上,由于輪胎上的力與滾筒之間的作用力大小相等、方向相反,動態力傳感器與制動檢驗臺的被測力值傳感器數值應相等,因此,動態檢定法不僅可對比結果數據,還可以對比制動力過程曲線,更準確地反應出被檢定的制動檢驗臺所測試數據的真實性。
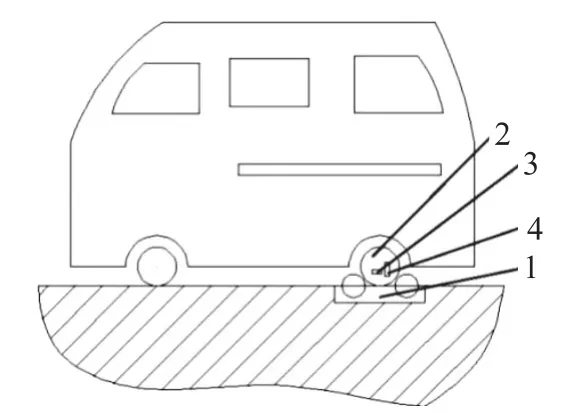
圖1 動態制動力檢定裝置
1.2 檢定方法的比較
依據JJG 906-2015,靜態檢定首先要進行零位示值檢測,保證制動檢驗臺空載,將二次儀表調零。啟動電動機,當滾筒轉速穩定后,記錄二次儀表最大零位偏離值。停止電動機轉動,依照以上方法再進行第二次零位示值檢測,共計進行三次。然后檢查制動力零點漂移實驗,保持制動檢驗臺空載,二次儀表調零后,相隔10 min記錄零位變化值,共計記錄三次。規程中要求零位偏離值在30 min內不大于滿量程的±0.2%。
制動檢驗臺的制動力是通過杠桿的力臂將標準力值放大后與被測力值傳感器示值進行對比,判斷出被測力值傳感器是否符合規程的要求。靜態檢定時有兩種加載方法,方法一見圖2(a)、方法二見圖2(b),可任選。
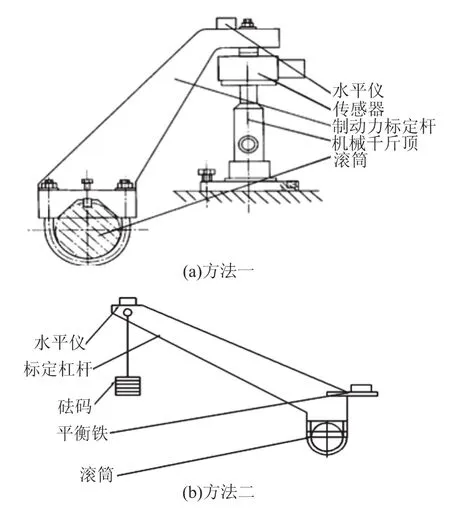
圖2 制動檢驗臺兩種加載的靜態檢定方法
法定計量技術機構工作人員依據JJG 906-2015,進行了現場試驗,如圖3所示,并記錄現場原始數據。

圖3 靜態檢定試驗現場
動態檢定時(如圖4),將機動車行駛入制動檢驗臺,制動檢驗臺開機,滾筒帶動車輪轉動,記錄制動檢驗臺左右阻滯力,動態制動力檢定裝置清零,當制動檢驗臺顯示屏顯示踩剎車時,操作員在5~8 s內慢踩剎車,要保證輪胎不出現抱死狀態。如出現抱死狀態,采用增加載重的方式,試驗每組操作10次,用動態制動力檢定裝置上位機軟件進行繪制,選取左、右制動力作為數值參數變量,與制動檢驗臺儀表示值進行比較,計算出制動檢驗臺動態制動力的絕對誤差,自動生成檢測報告。

圖4 動態制動力檢定試驗現場
1.3 檢定裝置的比較
1)靜態檢定砝碼法的檢定裝置主要為M2等級的砝碼,其中砝碼屬于實物標準器,可以直接進行測量。靜態檢定傳感器法主要由標準測力傳感器和顯示裝置組成,標準測力傳感器的準確度要求為0.3級,輸出電壓信號一般通過8位ADC轉換器,轉化成數字信號后由串行的I2C總線與8位單片機進行通信,經單片機處理后導通三極管驅動LED小燈刷新點陣屏或LCD1602/12864液晶屏顯示。
2)動態檢定裝置硬件主要由數據處理單元和信號輸出裝置構成,數據處理單元由集成儀表和無線通信模塊組成,主要特點是信號采集穩定性好、速度快、準確度高,可設定量程上下限、獲取峰谷值、零點滿量程修復、折線修正及通信協議(Modbus-RTU或TC)等功能。檢測過程中儀表通過實時接收變化的無線模塊反饋信號,信號經過采集、運放、濾波,最后進入模數轉換,最終將測試數據存儲上傳。信號輸出裝置采用應變式傳感器,它具有高穩定性、良好的溫度及蠕變補償性能,對車輪結構進行設計后與扭矩傳感器裝配,形成一臺動態參考輪。采用的扭矩傳感器具有體積小、準確度高、溫漂小等特點,參數如表2所示。
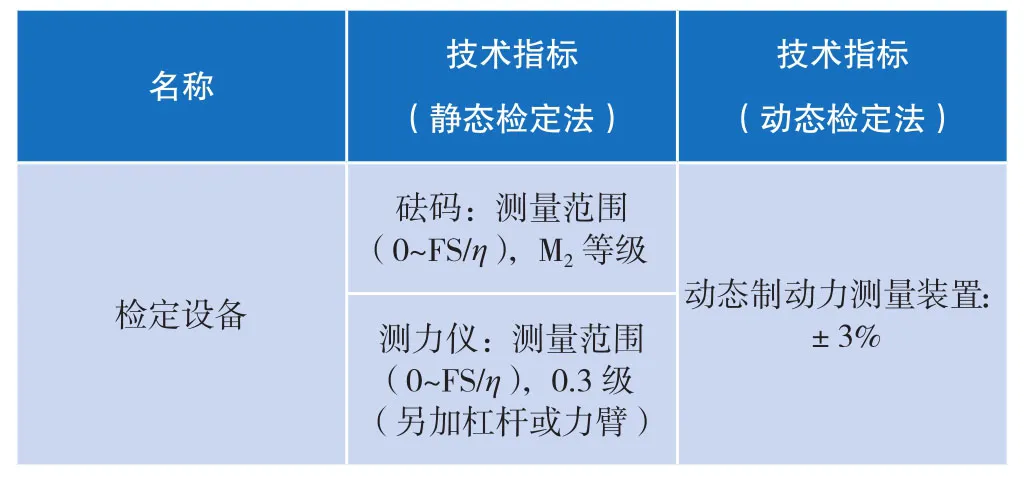
表2 兩種方法的檢定設備參數對比表
1.4 數據計算的比較
1)實施靜態檢定法時,按照制動檢驗臺額定載荷的20%、40%、60%、80%和100%均勻選取五個測試點,當采用方法一時,按式(2)計算各測試點所需的加載用砝碼的質量m,計算該測試點的制動力標稱值F見式(3)。

式中:mj′——第j測試點所需的加載用砝碼質量的計算值,kg;
D——滾筒直徑,mm;
Fj′——第j測試點的制動力預選值,N;
L——加載裝置的力臂長,mm;
g——檢定地點的重力加速度,m/s2

式中:mj——第j測試點加載用砝碼質量的實際值,kg;
Fj——第j測試點制動力的標稱值,N
用方法二時,按式(4)計算各測試點所需的加載載荷。

式中:pj——第j測試點所需加載的載荷,N
2)實施動態檢定法時,選取左、右制動力作為數值參數變量,與制動檢驗臺儀表示值進行比較,計算出制動檢驗臺動態制動力的絕對誤差;左、右制動力減去阻滯力和檢測儀示值之差與檢測儀示值相對比,得到相對誤差,見式(5),并計算10次測量值的平均值。

式中:δi——第i次測量所得動態制動力示值相對誤差,(i=1,2,3,…,10),%;
F制動臺——第i次測量時,制動檢驗臺顯示的制動力,N;
F阻滯力——第i次測量時,制動檢驗臺顯示的阻滯力,N;
F標準值——第i次測量時,動態制動力檢定裝置顯示的制動力標準值,N
1.5 示值誤差和重復性要求的比較
JJG 906-2015要求,靜態制動力檢定法示值誤差不超過±3%,間差不超過±3%,重復性不超過±2%,即可判定該項合格[5]。
動態制動力檢定是將制動檢驗臺設定在“制動”的情況下進行檢定,檢測車輛真實的制動力,將實際制動力與制動檢驗臺顯示值進行對比,計算出示值誤差,檢定規程要求示值誤差不超過±8%,重復性不超過±3%,即可判定該項合格,對測量間差不做要求。

表3 檢定規程中靜態誤差和動態誤差
1.6 不確定度來源及減小方法
靜態檢定法采用標準測力傳感器(或標準砝碼),利用杠桿原理對制動檢驗臺進行檢定,其不確定度主要來源于三大因素。(1)制動檢驗臺的不確定度,包括儀表數顯分辨力和測量重復性;(2)標準裝置的不確定度,包括標準測力傳感器或標準砝碼的不確定度;(3)杠桿傳力比不確定度,包括杠桿傳力比允許誤差、杠桿安裝誤差和杠桿與制動檢驗臺夾緊誤差。從相關的不確定度文獻中可以看出[6],三大不確定度來源所占的百分比如圖5所示,其中,杠桿傳力比不確定度占據主要的不確定度來源。
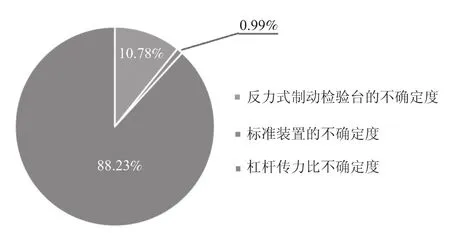
圖5 靜態制動力檢定法不確定來源占據的百分比
為了減小杠桿傳力比引入的不確定度,除了保持力臂水平、減小杠桿的安裝誤差和夾緊誤差外,建議采取加載后清零的方法來減小誤差。具體操作如下:
杠桿安裝完畢后,逐漸加載至滿量程的 50%,用水平尺調整專用測力杠桿處于水平狀態,卸載至滿量程的 2%~5%。
標準測力傳感器與制動檢驗臺儀表同時調零,按規定測試點對制動檢驗臺逐級加載,讀取各測試點所對應的左(右)制動檢驗臺示值fil(R),重復測量三次。按式(6)計算示值誤差,按式(7)計算三次測量示值誤差的平均值。
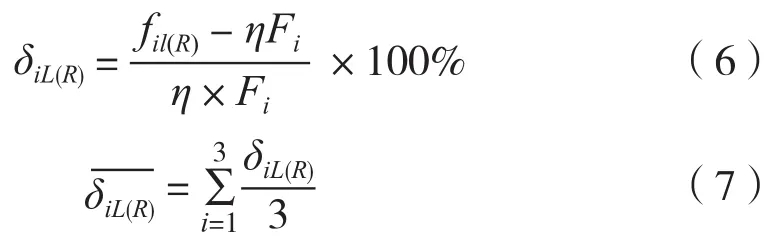
式中:fil(R)——第i次測量時制動檢驗臺儀表顯示值,N;
η——杠桿傳力比;
Fi——第i次測量時,左(右)制動檢驗臺所對應標準測力傳感器的力值,N;
δiL(R)——第i測量時,左(右)制動檢驗臺的示值誤差,%;

各檢定點示值誤差均應滿足JJG 906-2015的要求。如果檢定過程中杠桿明顯傾斜,則需要對杠桿傳力比進行數據修正。
動態制動力檢定法影響因素較多,主要有裝置誤差、人為測量誤差等。影響最大的因素是人為誤差,由于引車員每次測量不能保持相同力值踩剎車制動,因此,人為因素影響較大,重復性較差。建議引車員規范操作,同時使用踏板力計作為輔助工具,來保持力值的一致性,減少人為測量誤差。
2 結論
靜態制動力示值誤差檢定是對均勻分散的六個測試點進行檢定,計算測試點是否符合檢定規程。使用該方法后顯示值穩定、操作便捷,能夠準確地對不合格測試點進行重新檢定。動態制動力檢定法可以擬合出實際檢測曲線或分段,使直線或直線分段上各點更加靠近真實值(如圖6所示),可以描述出動態制動力實際檢測過程。
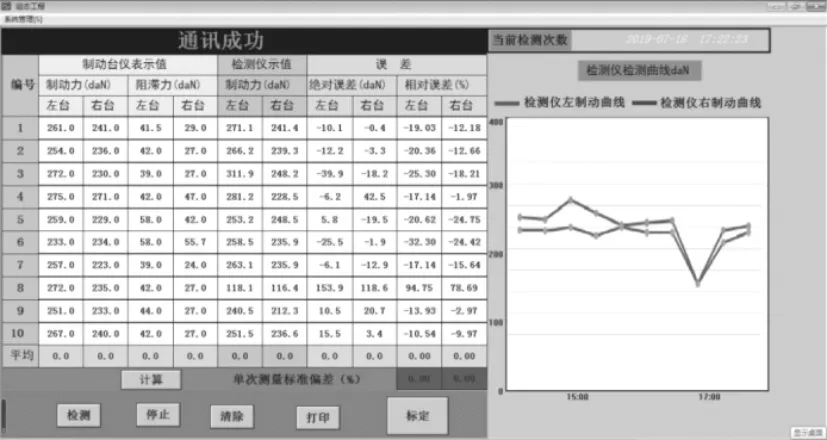
圖6 動態制動力檢定法軟件檢測計算
動態制動力檢定能夠描述制動力檢測曲線不斷變化的動態過程。制動力檢驗臺生產廠家一般將檢定系統和制動測試系統設置為兩種狀態,檢定系統狀態為了數據顯示穩定,對數據采樣值進行了硬件濾波和軟件平滑處理,使制動力峰值受到損失,而真實的制動力檢測由于受到外界電磁干擾,數值起伏大非常不穩定。因此,檢定的系統與真實的制動測試系統制動力峰值有很大差別,一些系統中,檢定的峰值損耗有時可達到30%以上。另外,由于引車員踩制動力踏板過程有快慢,因此,0.3~1.0 s的一段曲線緩慢上升,動態制動力檢定能夠判斷引車員是否有提前踩制動力踏板的行為,讓采樣值更加貼近實際,真實可信。但是由于車輛制動過程較為復雜,影響因素很多,因此,動態制動力檢定的穩定性和重復性都不高(如圖7所示)。同時,動態制動力檢定是個變化過程,數值不能固定,動態檢定裝置最終溯源到靜態砝碼標定法,所以不適用于設備的現場標定工作,不具備標定意義[7-8]。可以作為實際檢定工作的一部分,是對靜態制動力檢定工作的重要補充。
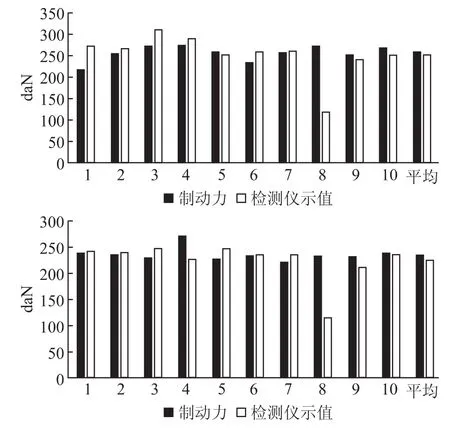
圖7 動態制動力檢定法左、右輪制動力與檢測儀示值對比
3 結語
本文主要分析了滾筒反力式制動檢驗臺靜態和動態檢定法在檢定原理、方法、裝置、數據計算、示值誤差、不確定度來源六個方面的不同。最終得出結論:動態制動力檢定法作為首次檢定方法是滾筒反力式制動檢驗臺檢定工作的重要組成部分,是對靜態制動力檢定工作的重要補充。