網聯車對抗神經網絡跟馳模型*
2021-03-09 09:39:56楊云慶盤朝奉魯光泉
汽車工程 2021年2期
關鍵詞:模型
梁 軍,王 軍,楊云慶,陳 龍,盤朝奉,魯光泉
(1. 江蘇大學汽車工程研究院,鎮江 212013;2. 江蘇大學運輸服務中心,鎮江 212013;3. 北京航空航天大學交通科學與工程學院,北京 100191)
前言
在網聯車(connected and autonomous vehicle,CAV)與傳統車輛共存的混行交通流場景下,伴隨著自動駕駛技術的突飛猛進和CAV 滲透率(指其數量在混合交通流全部車輛中的比例)的不斷提高[1],出現了實時性差、車隊穩定性不足等問題。因此,混行交通流下CAV跟馳模型成為當前研究熱點[2-3]。
目前CAV跟馳模型主要有刺激-反映模型[4]、安全距離模型[5-6]、生理-心理模型[7]和人工智能類模型[8-9]4種。人工智能類模型主要是通過駕駛員的邏輯推理來研究駕駛行為的跟馳模型[10-11],相比于前3種跟馳模型,它具有局部穩定性好[12]、計算時間短和準確率高的特點[13]。張金輝等[14]在混行交通流場景下,通過貝葉斯網絡對跟馳過程中前車未來0.1、0.5、1 和2 s 時刻的運動狀態進行預測,但該模型計算時間較長,導致跟馳模型準確率較低,對CAV 控制不夠精確;郭艷君等[15]利用遺傳算法優化了BP神經網絡跟馳模型,提高了CAV 跟馳模型的準確率,但模型在混行交通流下仍存在一定的局限性;Ding等[16]將基于 BP 神經網絡的 Gipps 模型與 BP 模型耦合,改進了最優加權法的目標函數,建立了線性組合跟馳模型(linear combination car?following model,LC?CF),提高了跟馳模型在混行交通流下的適應能力,但對于前車車速變化的實時性較差;Kuefler 等[17]將模仿學習擴展到循環策略的訓練中,將駕駛員行為克隆添加進跟馳行為中,提升了混行交通流下跟馳車輛的實時性,但不足的是無法對不良駕駛行為進行識別剔除,存在安全隱患。總的來說,針對混行交通流場景,目前CAV 跟馳模型安全性低、實時性差,在混行交通流場景下存在車隊穩定性不足的問題,迫切需要一種計算能力更強、實時性更好的人工智能模型。Zhang等[18]提出生成式對抗網絡(generative adversarial nets,GANs),在訓練或生成樣本的過程中,可以直接通過對生成的樣本進行定性和定量評估,實驗證明了該框架的穩定性和對數據的計算能力。Reed 等[19]將 GANs 應用在圖像識別領域,成功證明了相比于其它神經網絡,GANs 的計算能力更強,準確性更高[20-22]。
因此,本文在對混行交通流CAV 跟馳模型實時性、安全性和車隊穩定性分析的基礎上,利用GANs零和博弈思想和結構穩定、計算能力強的特點,提出GANVFM 模型及其算法,并通過仿真實驗加以對比驗證。
1 混行交通流中CAV 跟馳行為特性分析
在混行交通流場景下,主要分析CAV和傳統車輛對前車速度改變過程中的3種變化情況:(1)跟馳車輛與前車安全距離的變化情況;(2)跟馳車輛對前車速度改變的響應速度和對自車速度的變化情況;(3)跟馳車隊的穩定性變化情況。因此,CAV跟馳模型必須兼顧跟馳車輛實時性、安全性和車隊的穩定性。
1.1 實時性分析
實時性是指在前車行駛狀態發生改變時,跟馳車輛對前車速度變化的響應特性,即要求CAV 跟馳模型在最短時間內調整跟馳狀態,故采用均方差作為評價參數[23],即
式中:σα為加速度數據的均方差;σv為速度數據的均方差;an為車隊中第n輛車的加速度;vn為車隊中第n輛車的速度;N為車隊車輛的總數。
1.2 安全性分析
安全性是指車隊中任意車輛狀態發生改變時,跟馳車輛的安全特性。為保證CAV 在跟馳過程中的安全性,引入追尾預測因子γn作為評價參數:
式中:n為車輛編號;jmax為車輛的最大減速度;D為兩車之間的相對車距。γn用于判斷追尾事件發生概率,在路面附著系數以及輪胎參數一定的情況下,跟馳車輛間相對車距越大,車輛車速越小,追尾概率越低,追尾預測因子γn越小。γn>1 時,則跟馳車輛有追尾險情,0<γn<1時,則跟馳車輛較為安全。
1.3 車隊穩定性分析
車隊穩定性指當車隊頭車速度變化時整個車隊行駛狀態的變化程度,采用跟馳狀態因子φn作為評價參數[24]。
式中T為速度狀態改變的時間。φn用于刻畫車輛跟馳狀態的穩定程度,跟馳車輛速度變化幅度越大,即φn越小跟馳狀態和車隊穩定性越差;φn越大,車輛跟馳狀態越佳,車隊穩定性越好。
2 GANVFM模型
為滿足跟馳車輛實時性、安全性和車隊穩定性的條件,將模型GANVFN 分為生成模型(generator model,GM)和辨別模型(discriminator model,DM)兩個模塊,以此進一步提高GANVFM的整體運算能力,如圖1 所示。CAV 通過車聯網和車載雷達同時采集跟馳參數。GM通過提取跟馳參數中跟馳車速vn+1、前車車速vn和相對車距D,通過生成函數計算輸出跟馳車輛的加速度αG,最后將其合成新的生成跟馳參數,由DM通過判別函數將其與測試集參數加以辨識,再根據相似度計算結果,反向傳導誤差從而更新生成函數與辨別函數。
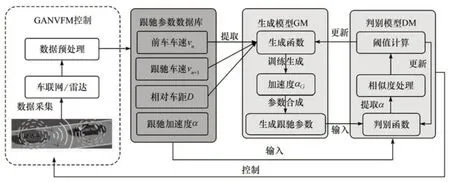
圖1 GANVFM模型框架
2.1 GM模塊的設計
綜合考慮網絡結構復雜程度和誤差大小選定隱層神經元個數為4,輸入神經元個數為3,分別是跟馳車速vn+1、前車車速vn和相對車距D,用矩陣[vn+1,vn,D]表示,輸出神經元為跟馳生成加速度αG,輸入層與隱藏層之間進行全連接。每組GM的跟馳參數[vn+1,vn,D]隨著時間t變化而變化,根據時間狀態的改變,將其記作St,把每組由生成加速度函數模擬生成的參數 (S,α) 記錄進生成數據庫χμ,其中χμ={(S1,α1),(S2,α2),(S3,α3),…,(St,αt)},同時將采集的每組測試集的跟馳車速、前車車速、相對車距和跟馳加速度參數[vn+1,vn,D;αT]記錄進測試集跟馳數據庫χE。GM目標函數是為使生成加速度αG與真實加速度αT更為相似,即要求兩者差異越小越好,目標函數為

為衡量上述目標函數中兩參數的差異性,引入JS散度對其進行評價。JS散度具有對稱性和非負性特點[25-26],GM訓練效果越好,αG和αT的相似度越高,差異性越小,GM 的損失函數越接近于αG和αT分布的JS 散度,當兩者分布相等時,其散度恰好為0。JS散度的生成加速度函數為
生成加速度函數的參數自適應更新函數為

2.2 DM模塊的設計
Dλ(S,α)為DM 判別器,為判別出該組跟馳數據是否由GM生成,DM目標函數為
DM 將來自真實加速度數據標記為1,而將生成加速度函數數據標記為0,鑒別函數的更新過程類似于sigmoid的二分類[27],鑒別函數的代價函數為

判斷函數的參數自適應更新函數為

GANVFM 通過車聯網和雷達傳感器采集跟馳參數,將跟馳參數[vn+1,vn,D]通過生成函數訓練輸出生成加速度αG,同時將GM 中跟馳模型的輸入和輸出參數合成為跟馳模型生成參數[vn+1,vn,D;αG];然 后 將 [vn+1,vn,D;αG] 與 跟 馳 模 型 參 數[vn+1,vn,D;αT]通過辨別函數進行辨別,提取對應的加速度參數[αG,αT]對其進行相似度計算,其中為避免GANVFM 模型崩潰,采用0.5作為η的閾值,使 GM 和 DM 更新的幾率相等。若η<0.5,生成加速度與實際加速度差異小,則對DM 判別器要求更高,須通過更新函數更新DM,以提高對生成參數的辨別性;若η>0.5,則證明GM 生成加速度不符合實際加速度,即兩參數差異較大,須通過更新函數更新GM;若η=0.5,則證明GM與DM達成平衡。
3 實驗
3.1 實驗說明
利用自建的駕駛員在環半實物仿真平臺,設置CAV 和傳統車輛混行交通流場景,通過PreScan/Simulink 軟件平臺仿真模擬V2X 通信和雷達傳感器[28-29],并由Simulink存儲所采集的跟馳參數和執行對仿真車輛的控制。選取駕齡1 年以上的男女駕駛員各10 名作為實驗員,通過設定不同的前后車速、相對車距和交通場景下滲透率比例來采集跟馳數據。設定跟馳加速度采集頻率為2 Hz。
通過Simulink 將采集的數據導出,數據經過篩選共選擇10 000條,從中選取9 250條作為訓練集數據進行訓練,選取750 條作為測試集數據進行測試驗證。GANVFM 的生成函數模型以及辨別函數模型在迭代100 代以后平穩,整個模型趨于穩定。與測試集輸出對比結果表明,GANVFM 模型預測的跟馳加速度αG在測試集數據的準確率為95.3%,見圖2。
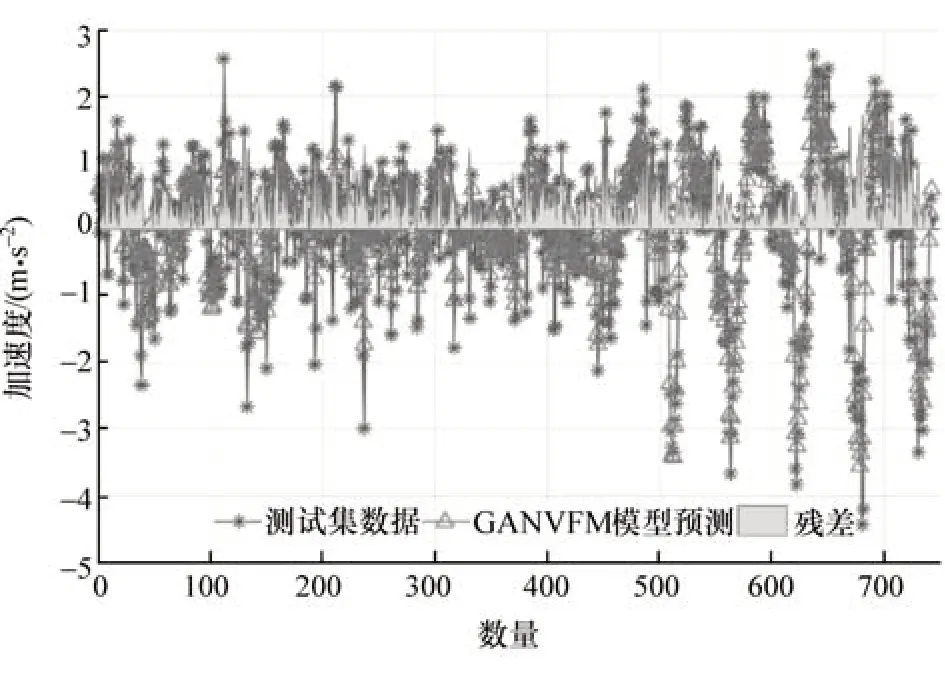
圖2 實際加速度與預測加速度對比
3.2 實時性驗證
隨機抽取前15 s 跟馳過程中的加速度參數,同時將GANVFM 預測的跟馳加速度與實驗跟馳加速度、BP 跟馳加速度和LC?CF 跟馳加速度進行對比,結果如圖3所示。
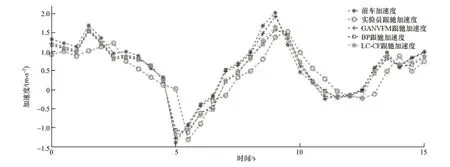
圖3 跟馳加速度對比
采用式(1)計算σα,得到σα-實驗員=0.4903σα-BP=0.1894,σα-LCCF=0.1506,σα-GANVFM=0.1491。 可 見 ,GANVFM 對前車加速度變化的反應最快,實時性最優。
3.3 安全性驗證
隨機抽取前120 s 的跟馳過程中的跟馳車速參數,將 GANVFM 與 BP 模型、LC-CF 模型和實驗員的跟馳車速進行對比,結果如圖4所示。
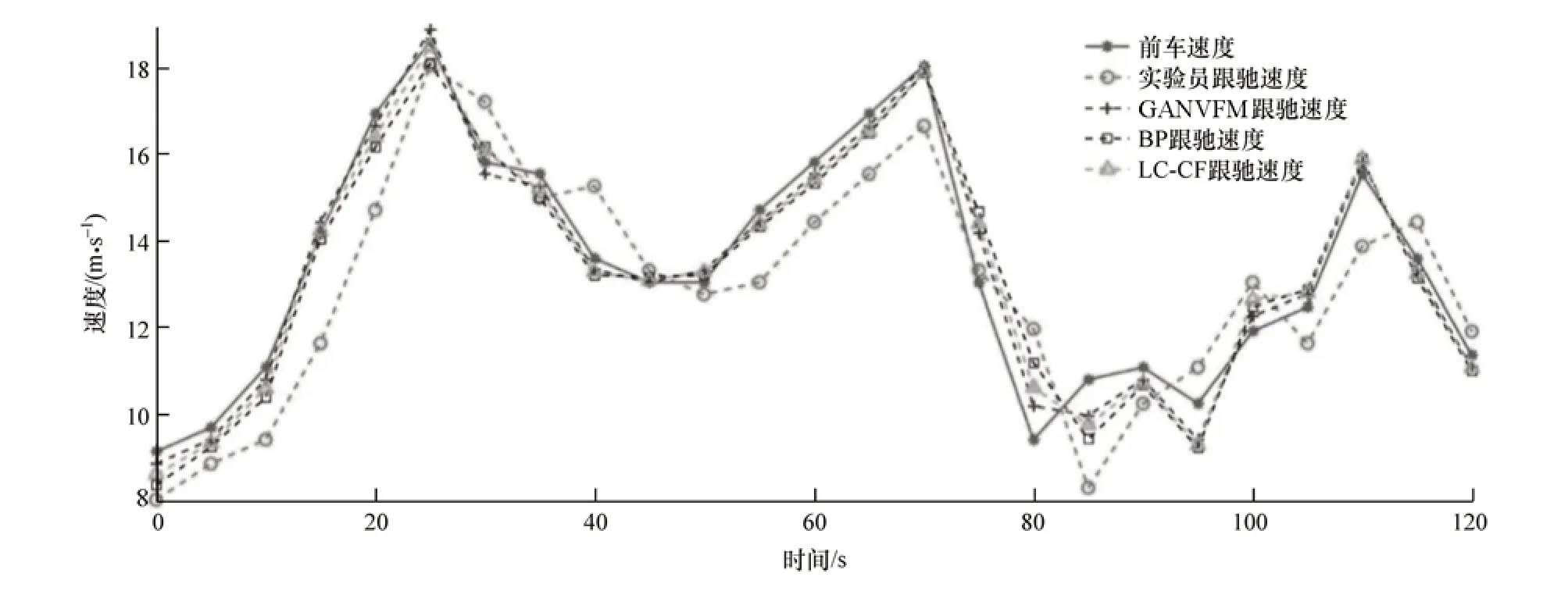
圖4 車速軌跡對比
分別用式(2)和式(3)計算σv和γn,結果如表1所示。表明實驗員控制的車輛對前車車速變化的響應最慢,相比于其他模型,GANVFM 的σv和γn都最小。說明GANVFM控制最及時準確,安全性最佳。
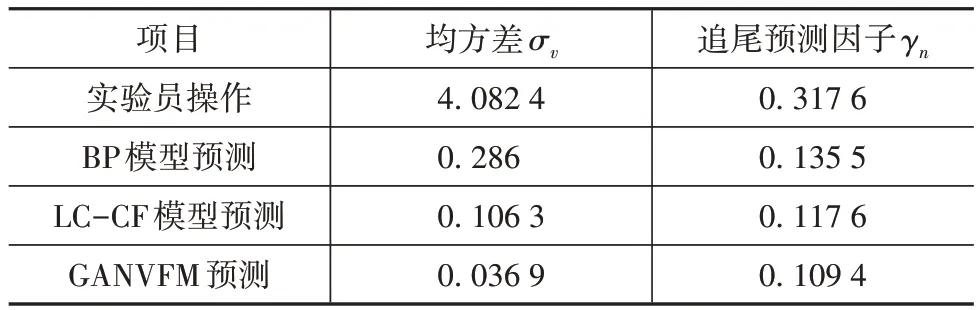
表1 跟馳車速數據對比
3.4 車隊穩定性驗證
選取9 輛車Cn(n=1,2,3,4,…,8,9)組成車隊。在單車道對GANVFM 進行研究。車隊第1輛車記為頭車C1,對其駕駛行為采用標準工況,包含加速、減速和勻速階段,為驗證不同滲透率下車隊的跟馳狀態,保持C1的運動工況始終不變。同時設定車隊中既有傳統車輛,又有搭載GANVFM 的CAV,記為GANVFM?CAV。實驗分為3組,分別選取GANVFM?CAV 滲透率δ為50%、37.5%和25%。實驗A 選取δ為 50%,選取C2、C3、C8、C9為 GANVFM?CAV,C4、C5、C6、C7為傳統車輛,截取前30 s 車輛速度數據,結果如圖5所示。
同時,隨機選取a(t=10 s)、b(t=18 s)、c(t=25 s)3個節點,采集3個節點跟馳車輛與前車的相對車距D和跟馳速度vn+1,如表2所示。計算GANVFM?CAV平均相對車距D1和傳統車輛平均相對車距D2,得到D1=15.73 m,D2=19.93 m,在δ為50%時GANVFM-CAV車隊長度平均比傳統車輛隊列長度縮短比例ξ約為21.1%。
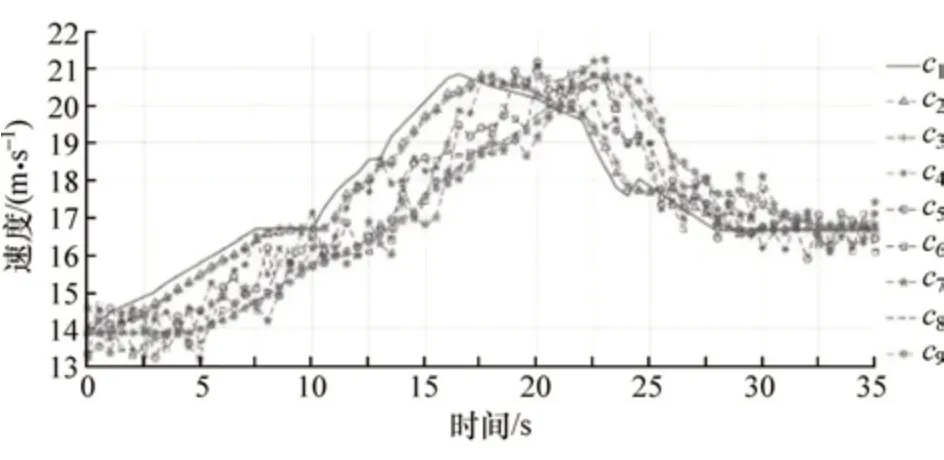
圖5 滲透率50%的實驗結果
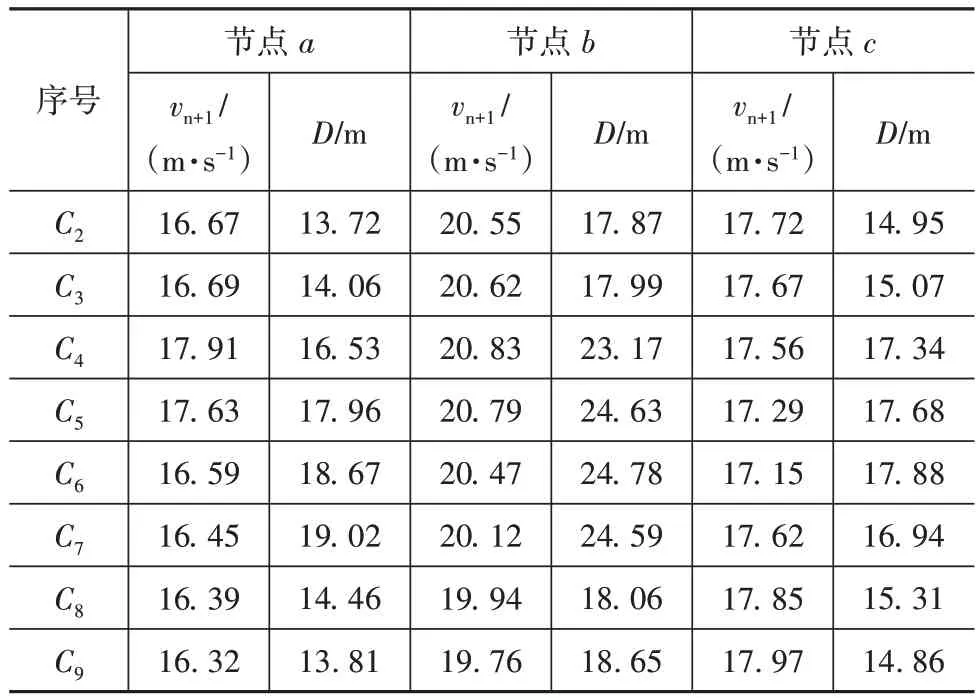
表2 50%滲透率時CAV與傳統車輛相對車距和速度的對比
實驗 B 選取δ為 37.5%,選取C3、C4、C8為 CAV,C2、C5、C6、C7、C9為傳統車輛,截取前 30 s 車輛速度數據,結果如圖6所示。
隨機選取a(t=11 s)、b(t=19.5 s)、c(t=27 s)3 個節點,采集3個節點跟馳車輛與前車的D和vn+1,如表3 所示。計算得到D1=15.52 m,D2=19.03 m,說明在δ為37.5%時GANVFM-CAV 車隊長度平均比傳統車輛隊列約縮短18.4%。
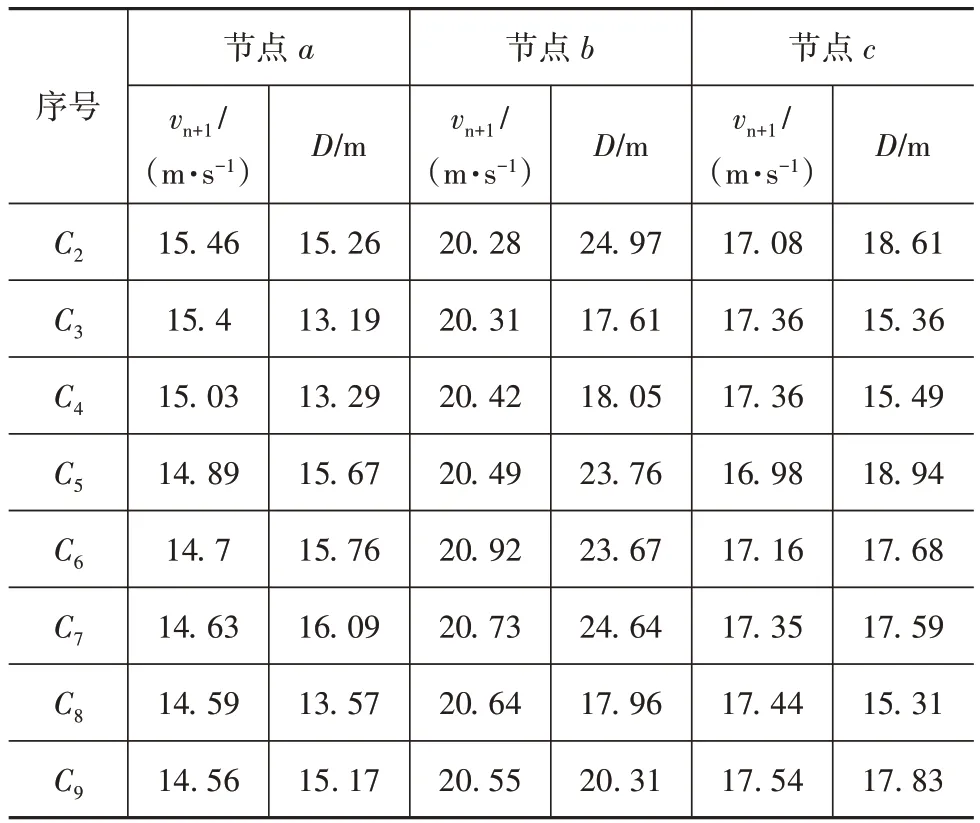
表3 37.5%滲透率時CAV與傳統車輛相對車距和速度的對比
實驗 C 選取δ為 25%,選取C3、C4為 CAV,C2、C5、C6、C7、C8、C9為傳統車輛,截取前30 s車輛速度數據,結果如圖7所示。

圖7 滲透率25%的實驗結果
隨機選取a(t=13 s)、b(t=18 s)、c(t=26 s)3 個節點,采集3 個節點跟馳車輛與前車的D和vn+1,如表4 所示。算得D1=18.48 m,D2=21.74 m,說明在δ為25%時GANVFM-CAV 車隊長度平均比傳統車輛隊列約縮短15%。
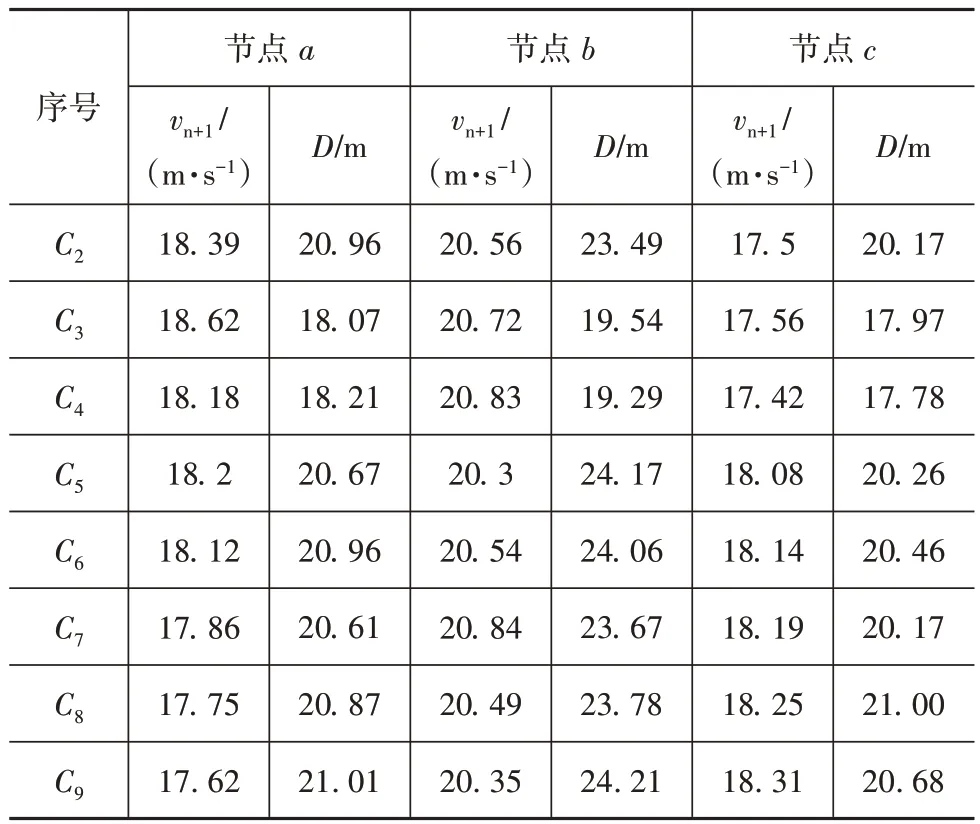
表4 25%滲透率時CAV與傳統車輛相對車距和速度的對比
通過3 組不同滲透率的實驗可知,相比于傳統車輛隊列,GANVFM-CAV 車隊長度大幅度縮減,當δ為50%時車隊約縮短22.1%。接著計算3 種滲透率下的γn和φn,結果如表5所示。
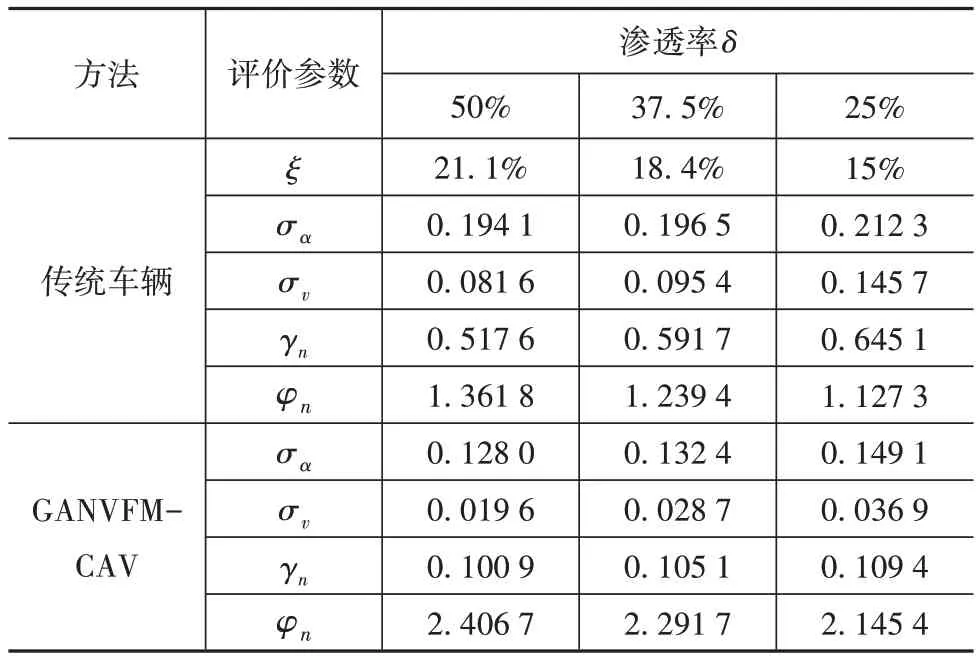
表5 車隊評價參數
由表5 可見,與傳統車輛相比,GANVFM-CAV的γn更小,φn更大,體現出GANVFM 的實時性更好,安全性和車隊穩定性更高。另外隨著滲透率δ的提高,γn越小,φn和ξ越大。說明 GANVFM-CAV 對混行交通流車隊跟馳穩定性有顯著提高,可以極大提高道路通行能力,緩解交通壓力。
4 結論
(1)針對當前CAV 和傳統車輛混行的交通場景下,CAV對前方車輛速度變化反應響應速度、跟馳車輛安全性和車隊穩定性較差的交通特性,提出了GANVFM 模型及其算法。實驗表明,GANVFM 在測試集上的準確率為95.3%。通過與其他模型對比得出,GANVFM 對前車車速改變的響應速度最快,實時性最好,追尾預測因子最小,安全性最優。
(2)對混行交通流中GANVFM-CAV 不同滲透率下的車隊穩定性進行實驗研究。實驗結果表明,滲透率越高的車隊,GANVFM 對車隊跟馳控制的適應性越好,車隊長度越短,車隊穩定性越高。因此GANVFM 可以極大提高混行交通流場景下CAV 車輛的實時性、安全性和車隊的穩定性,極大提高道路通行能力,緩解交通壓力,對自動駕駛技術的發展具有重要應用價值。
(3)下一階段將對本文提出的GANVFM 模型在大規模路網中考慮網聯汽車、非網聯汽車、非機動車和行人穿行的復雜混行交通場景下的適應性進行研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19