基于電機最優回饋轉矩曲線的制動控制策略*
2021-03-09 09:39:50曾小華陳虹旭宋大鳳李占江蔣元廣
汽車工程 2021年2期
關鍵詞:控制策略
曾小華,陳虹旭,宋大鳳,崔 臣,李占江,蔣元廣
(1. 吉林大學,汽車仿真與控制國家重點實驗室,長春 130022;2. 南京越博動力系統股份有限公司,南京 210000)
前言
面對日益嚴峻的環境和能源問題,汽車產業正經歷由傳統汽車向新能源汽車的轉變。其中,電動汽車與混合動力汽車發展迅速,并具有良好的市場前景。作為關鍵部件之一,驅動電機的運行特性大大影響電動車和混合動力車的行駛性能。永磁同步電機(permanent magnet synchronous motor, PMSM)具有功率密度大、運行效率高、控制器成本低等優點,廣泛應用于新能源汽車領域[1]。
永磁同步電機可分為表貼式和內置式兩種結構,由于內置式PMSM 永磁體安裝于轉子鐵芯內部,電機機械強度高,容易實現弱磁升速[2]。在電機的輸出轉矩和功率不變的前提下,提高驅動電機的最高轉速可以降低電機體積和質量,提高功率密度,因此內置式PMSM非常適合作為車用驅動電機。
對于混合動力車輛,提高燃油經濟性的有效手段之一是利用驅動電機回收再生制動能量,制定合理的制動控制策略以回收更多的能量。Ko 等[3]針對并聯式混合動力車輛,提出一種基于模糊控制的制動分配策略,實現再生制動與液壓制動的協調控制;Kumar 等[4]針對后輪驅動的串聯式混合動力車,在傳統并聯制動控制策略基礎上提出一種新的并聯協同控制策略,在實現制動回收能量提升的同時保證了駕駛員的制動感覺不變;靳立強等[5]為提高電動輪汽車的再生制動能量回收率,設計了一種模糊控制器,并以UDDS 循環進行了仿真;潘清貴[6]針對混聯式HEV 轎車設計了4 種制動模式,并提出了基于行星排外齒圈回饋制動轉矩優化的控制策略;郭金剛等[7]為實現電動汽車單次工況能量回收率最優,提出了一種基于制動強度控制的再生制動控制方法。
以上文獻缺少對車用驅動電機制動特性的分析,忽略了電機在低轉速下回收效率低甚至不能回收的問題。針對這一問題,盧東斌等[8]針對四輪輪轂電機驅動的電動汽車,分析了表貼式永磁同步電機的制動特性,并給出了能量回饋狀態的切換條件。綜合以上的研究現狀,進一步分析車用內置式永磁同步電機的制動特性,結合電機制動特性對電動車和混合動力車的制動回收潛力進行探究具有理論和實際意義。
本文中針對車用內置式永磁同步電機,基于PMSM 等效電路模型建立了電機的數學模型,分析了PMSM 的回饋制動狀態和耗能制動狀態,以及兩種制動狀態的切換條件;結合電機矢量控制策略解析出控制電流指令id、iq隨轉矩和轉速的變化曲面,計算得到最優回饋轉矩曲線,并據此提出一種回饋能量最優的制動控制策略;針對某一正在研發的P4構型混合動力商用車,在不同的循環工況下,對比分析并聯制動控制策略與本文所提出的回饋能量最優的串聯制動控制策略下的制動回收能量和燃油經濟性的提升效果。
1 內置式永磁同步電機制動原理
根據內置式永磁同步電機的等效電路模型,建立其數學模型,得到電機在驅動和制動狀態下的相量圖,分析了電機處于回饋制動狀態和耗能制動狀態下的條件。
1.1 永磁同步電機數學模型
內置式永磁同步電機在d?q軸上的等效電路模型如圖 1 所示[9]。其中,ud、uq分別為d、q軸電壓,id、iq分別為d、q軸電流,Rc為銅損電阻,Rf為鐵損電阻。將PMSM 運行過程中產生的銅損和鐵損視為流經Rc和Rf產生的熱損耗,idt、iqt分別為d、q軸上的轉矩電流,idf、iqf分別為d、q軸上的鐵損電流,Ld、Lq分別為定子繞組的d、q軸電感,ψf為轉子永磁體磁鏈,ωe為電機電角速度。
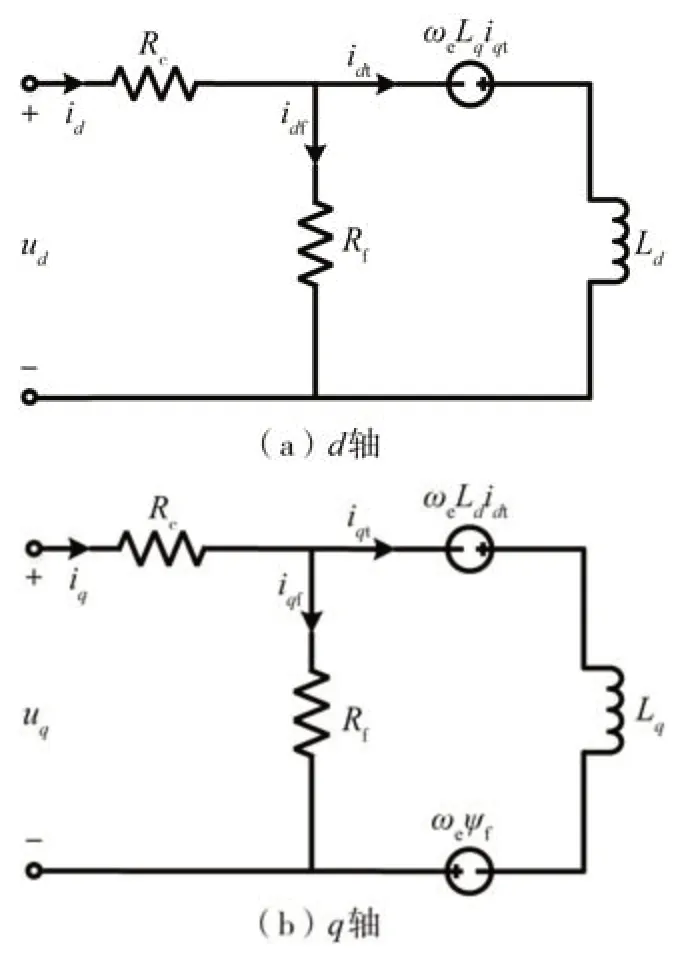
圖1 內置式PMSM等效電路模型
根據圖1,得到d、q軸電壓表達式為

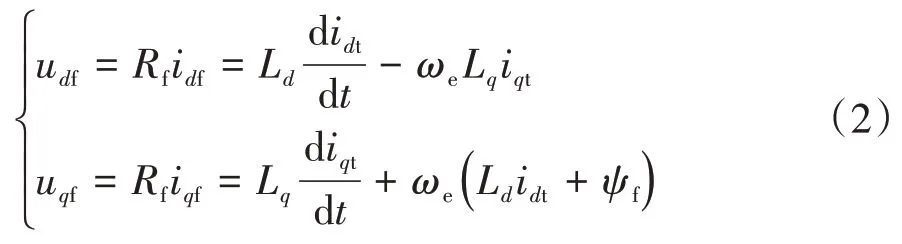
其中udf和uqf可表示為
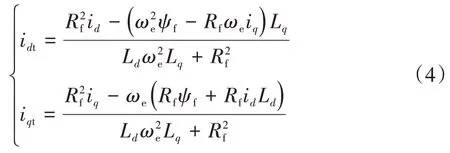
鐵損電流可表示為

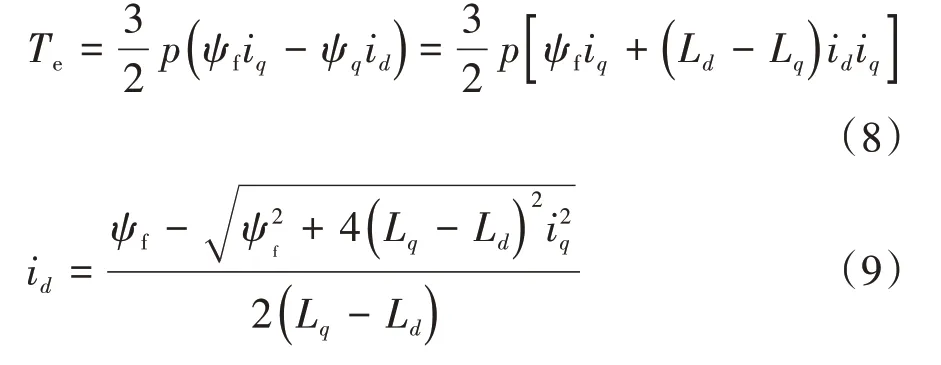
內置式PMSM輸出電磁轉矩為

式中p為極對數。
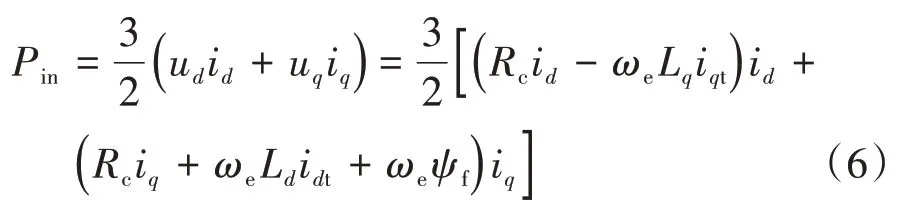
PMSM的輸入功率為
1.2 車用PMSM 制動特性分析
當電機穩態運行時,式(1)可表示為

式中E為電機反電動勢,E=ωeψf。
基于式(7),可繪制內置式PMSM 在驅動和不同制動運行狀態下的相量圖,如圖2所示。
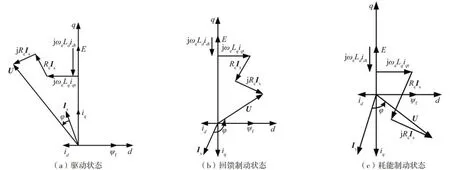
圖2 內置式PMSM在驅動和制動狀態相量圖
圖中U和Is分別為電機的電壓和電流矢量,j 表示電壓在相位上超前電流90°。
由圖2(a)可見,PMSM 在驅動狀態下,電壓矢量U在相位上超前于反電動勢E,U與電流矢量Is間的夾角φ小于90°,此時輸入功率為正,即電機運行消耗能量。在制動狀態下,通過控制q軸電流反向即可實現電機的制動控制,電壓矢量U滯后于反電動勢E,當反電動勢E足夠提供制動所需電流時,U與Is的夾角φ大于90°,如圖2(b)所示,此時輸入功率為負,電機向電池回饋能量,處于回饋制動狀態。如果電機的轉速較低,即反電動勢E較小,不足以提供制動所需電流,如圖 2(c)所示,U與Is的夾角φ小于90°,輸入功率為正,電池向電機輸出能量以保證制動需求,此時電機處于耗能制動狀態。
可見,對于車用內置式PMSM,當電機處于耗能制動狀態時消耗電池能量,只有處于回饋制動狀態才能有效地回收制動能量,這與電機轉速和控制電流有關。
2 制動回饋能量最優控制策略
由1.2 節的分析可知,當電機進行再生制動時,可通過控制電流指令id和iq使其處于回饋制動狀態,同時,根據式(6)所示的電機輸入功率表達式,當電機轉速一定,合理控制電流指令可使該轉速下輸入功率最小,即向電池回饋的能量最大,以實現最優的制動回收能量。本節中針對某車用內置式PMSM,解析需求制動轉矩與控制電流id、iq間的關系,得到id、iq隨轉矩和轉速的變化曲面,采用Matlab軟件計算電機進入回饋制動狀態和回饋能量最優時的轉矩—轉速曲線,并據此制定了回饋能量最優的制動控制策略。
2.1 控制電流指令解析
在車用電機的運行過程中,整車控制器根據踏板行程等信號,向電機控制器發出轉矩或負荷率指令,電機控制器通過控制電流實現對輸出轉矩的控制,為保證控制的實時性,控制電流指令id、iq一般通過電機轉速和轉矩查表得到[10],再根據電機實際輸出的轉速和轉子位置信號進行反饋修正。目前,車用內置式PMSM 常采用的控制策略為最大轉矩電流比控制(maximum torque per ampere,MTPA)和弱磁控制。在基速之前,永磁同步電機為實現銅損最小,控制電流id、iq沿MTPA曲線移動。忽略鐵損電阻(即式(4)中鐵損電阻Rf趨于無窮大),內置式PMSM 的電磁轉矩表達式如式(8)所示,MTPA 運動軌跡上id、iq滿足式(9)所示關系[11]。
隨著PMSM 轉速升高,電機的反電動勢增大,當反電動勢大于逆變器能輸出的最高電壓時,控制電流將無法跟蹤指令,因此對于車用高速驅動電機,在基速之后常采用弱磁控制以進一步升高轉速,通過調整直軸電流id來削弱永磁體磁場。在電機實際運行中,電機的工作點通常落在如式(8)所示的恒轉矩曲線與電壓極限圓的交點上[12],由于在電機高速運行時,定子電阻上壓降很小,故忽略了定子電阻,穩態條件下電壓極限圓表達式為

其中極限電壓ulim與直流電源電壓Udc滿足如下關系:

聯立式(8)與式(9)可得MTPA 控制下控制電流指令id、iq與轉矩和轉速的關系,聯立式(8)與式(10),則可得弱磁控制下id、iq與轉矩和轉速的關系,將解析出的指令電流代入PMSM 輸入功率表達式(6),即可確定當前工作點下的PMSM 輸入功率,作為求解最優回饋轉矩曲線的依據。
仿真所用車用電機主要參數如表1 所示。電機的d、q軸電感會受負載水平和激勵大小的變化而變化[13],Ld隨d軸電流id的變化曲線和Lq隨q軸電流iq的變化曲線,如圖3所示。
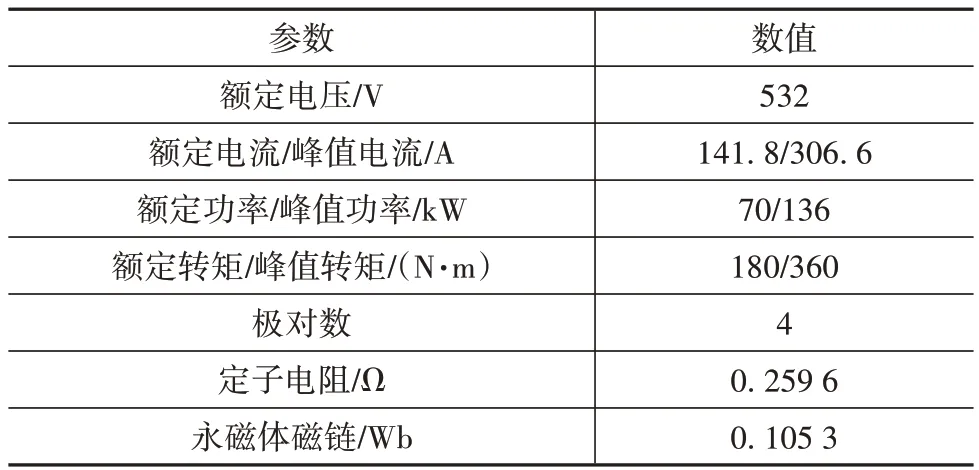
表1 電機主要參數
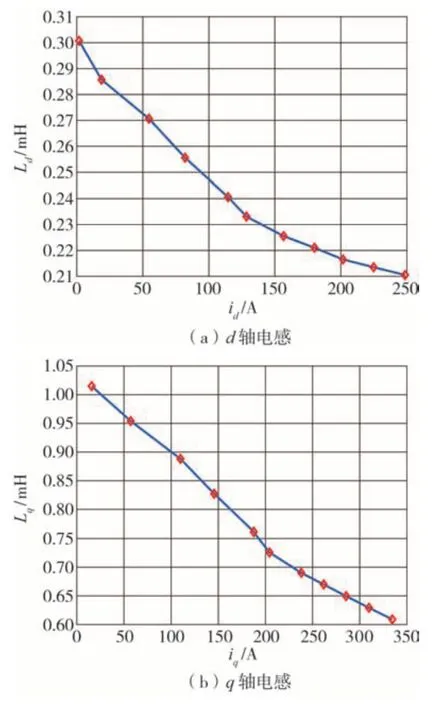
圖3 電感參數隨電流的變化曲線
將上述電機參數代入式(8)~式(11),得到控制電流指令id、iq隨電機轉速和轉矩變化的MAP 云圖,如圖4所示。
2.2 電流指令解析驗證
為驗證控制電流解析指令的準確性,將由圖4所示MAP 云圖查表所得的電流指令與電機的臺架試驗數據進行對比。圖5 為電機運行在500 與3 500 r/min 時,不同制動轉矩下試驗測得的交流電流與根據MAP 圖查表計算得到的仿真值對比曲線。
由圖5 可以看出,仿真得到的交流電流與實測數據的誤差很小,在5 A 以內,因此可用圖4 所示的MAP 云圖來解析指令電流id、iq,為進一步求解最優回饋轉矩曲線提供基礎。
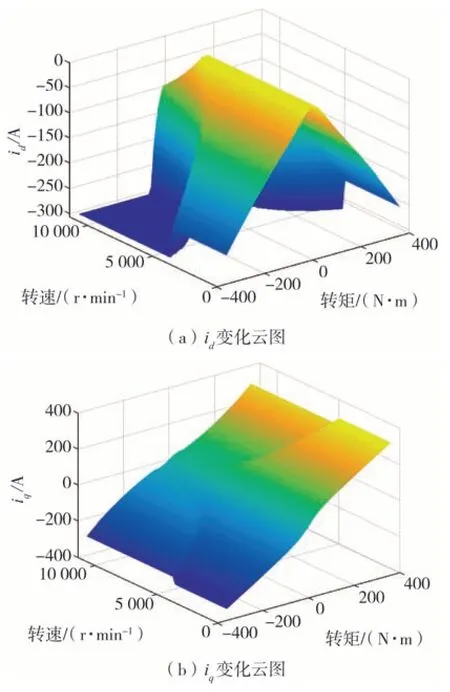
圖4 控制電流指令隨轉速和轉矩變化MAP圖
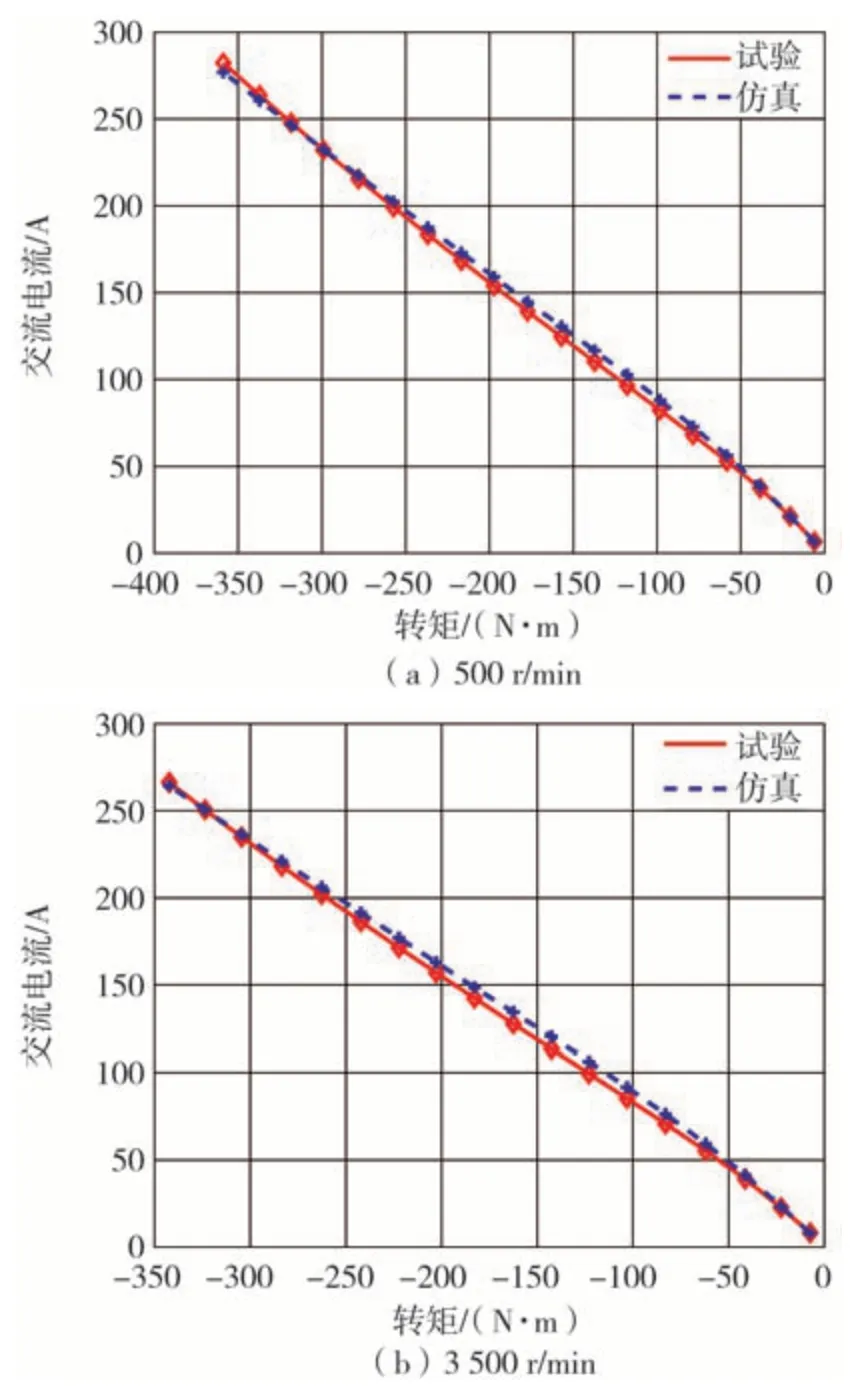
圖5 交流電流試驗與仿真數據對比
2.3 基于最優回饋轉矩曲線的制動控制策略
將電機的轉速和轉矩在運行范圍內離散化,根據2.1 節的控制電流指令解析結果得到每一離散點處的電流id、iq,將其代入式(6)中,即可得到電機在每一運行工作點處的輸入功率。當電機的轉速一定時,求得輸入功率最小時的制動需求轉矩,該轉矩即為該轉速下的最優回饋制動轉矩;在電機轉速較低時,輸入功率Pin>0,此時電機處于耗能制動狀態,計算出該轉速下輸入功率為負時的切換轉矩,即可得到電機允許能量回饋轉矩-轉速曲線。
應用Matlab軟件求得最優回饋轉矩與允許能量回饋制動轉矩曲線,如圖6所示。
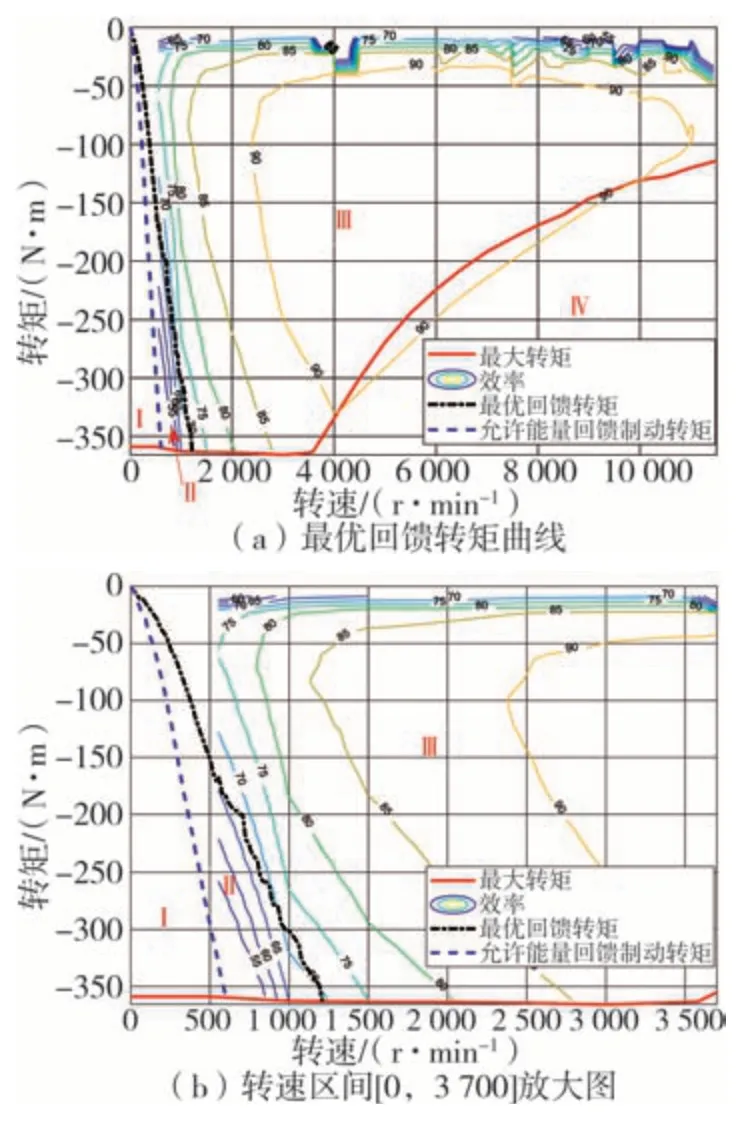
圖6 最優回饋轉矩曲線
圖中Ⅰ區即為電機的耗能制動狀態區,當電機工作點處于該區域內時制動將消耗能量。II區和III區為電機的回饋制動狀態區,在該兩區內制動可回收制動能量,其中,當電機工作點處于II 區時,電機提供最優回饋轉矩曲線上的制動轉矩,可實現輸入功率最小,即回收功率最大,剩余制動轉矩由機械制動補足。據此,制定基于最優回饋轉矩曲線的制動回饋能量最優控制策略為:在車輛進行再生制動時,當需求制動轉矩落在圖6 所示的Ⅰ區與Ⅱ區時,控制電機輸出最優制動回饋轉矩曲線上的轉矩;當需求制動轉矩落在Ⅲ區時,電機輸出所需要的制動轉矩;當需求制動轉矩落在Ⅳ區時,受到電機外特性的限制,電機輸出最大轉矩。
基于上述計算方法制定的基于最優回饋轉矩曲線的制動回饋能量最優控制策略,在電動車和混合動力車進行再生制動時可以得到理論上最優的制動回收能量。
3 仿真分析
下面結合某P4 并聯構型混合動力商用車,介紹了電動車與混合動力車輛常用的并聯制動和串聯制動控制策略,并分別在C?WTVC、CHTC?TT 循環工況和試驗采集到的某段省道工況下,對并聯制動和所提出的制動回饋能量最優的串聯制動控制策略進行了仿真分析。
3.1 電動車和混合動力車的制動控制策略
電動車和混合動力車的制動控制策略應合理分配機械制動與電力制動的比例,同時考慮到結構復雜性和布置方案的可行性,目前常用的制動控制策略包括并聯制動和串聯制動兩種控制策略。針對某P4 并聯構型混合動力商用車,驅動橋為由發動機驅動的中橋和由電機驅動的后橋,車輛進行再生制動時只能回收電驅動橋上的制動能量,在電驅動橋上不同制動控制策略下的制動力分配示意圖如圖7所示[5,9]。
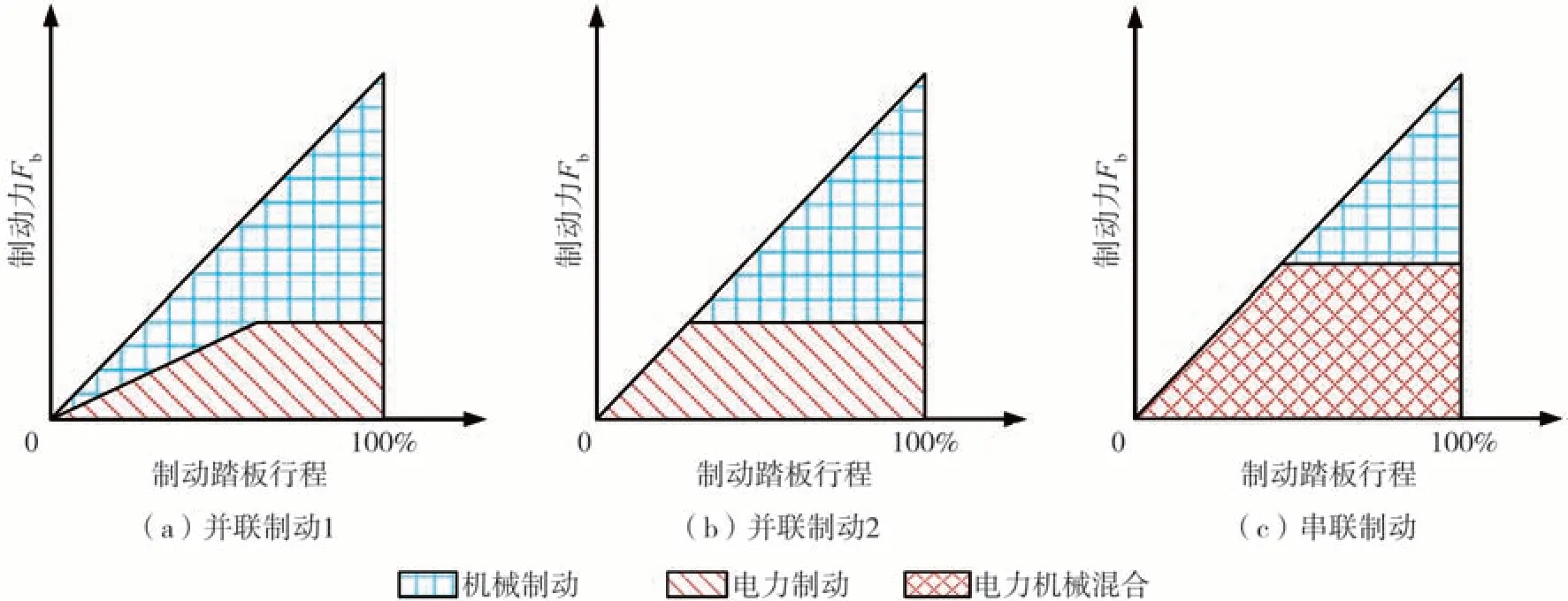
圖7 不同制動控制策略下的制動力分配
由圖7可見,并聯制動控制策略1是指在電機制動力到達額定制動力之前,電力制動與總需求制動力呈一固定比例,到達額定制動力后,電機制動力保持不變,機械制動力繼續增加;并聯制動控制策略2是指制動踏板行程到達臨界位置之前全部采用電力制動,臨界位置之后電機制動保持額定制動力不變,機械制動隨制動踏板行程的增大而增加;串聯制動策略采用第2 節提出的基于最優回饋轉矩曲線的回饋能量最優的制動控制策略。
在3 種控制策略中,并聯制動控制比較容易實現,并聯制動方案1 只需在原有制動系統中增加電力制動,并聯制動方案2 需要修改原有的制動踏板自由行程;串聯制動方案要求機械制動力能夠實時調節,實現起來較為復雜。由于并聯制動方案2 能比方案1 回收更多的制動能量,下一節將對并聯制動方案2 和所提出的基于最優回饋轉矩曲線的串聯最優制動控制策略進行仿真分析。
3.2 仿真分析
對某P4 并聯構型混合動力商用車進行不同制動控制策略下的仿真分析,整車基本參數如表2 所示,車輛構型如圖8所示。
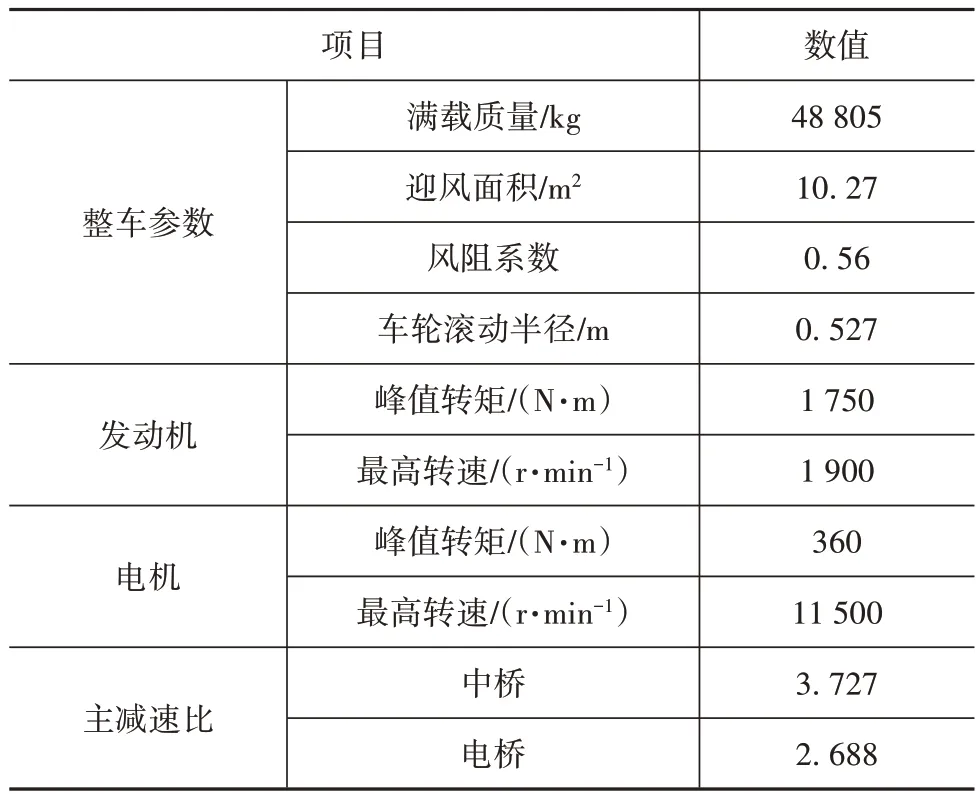
表2 整車基本參數
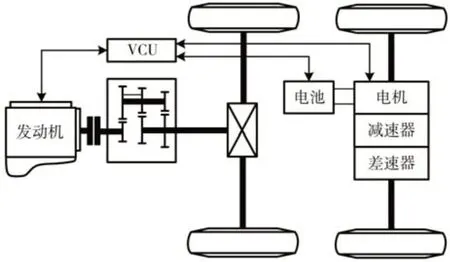
圖8 驅動橋構型圖
首先在C?WTVC 循環工況下進行仿真,工況信息如圖9所示。
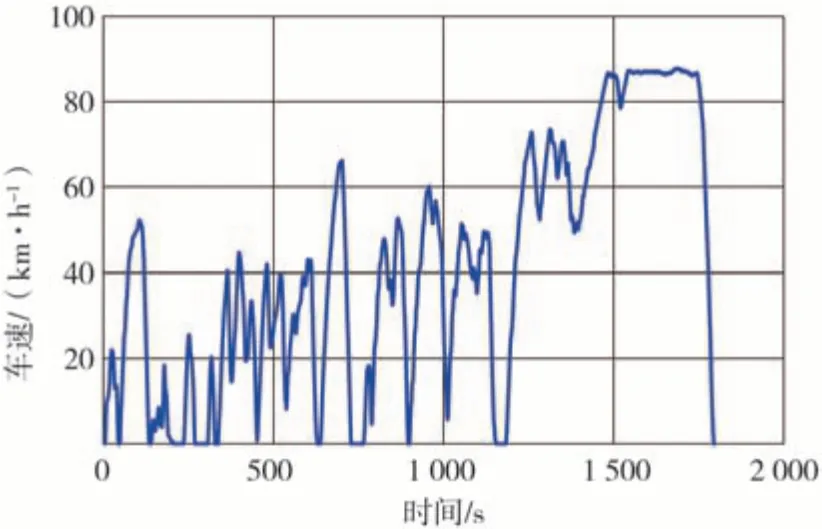
圖9 C?WTVC循環工況信息
仿真所用能量管理策略為發動機最優控制策略,在并聯制動和基于最優回饋轉矩曲線的串聯最優制動控制下的電機工作點分布分別如圖10(a)和圖10(b)所示。
由圖10(b)可以看出,在電機轉速較低時,電機的制動轉矩控制在最優回饋轉矩曲線上,滿足回饋能量最優的串聯制動控制策略的控制要求。兩種制動控制策略下仿真結果如表3所示。
由表3 可見,該P4 構型混合動力車在C?WTVC循環工況下理論驅動能量為170 433.37 kJ;仿真得到并聯制動控制下再生制動回收能量為13 796.06 kJ,串聯最優控制下再生制動回收能量為17 847.76 kJ。與并聯制動控制相比,串聯最優制動控制的再生制動回收能量提升了29.37%;再生制動能量與理論驅動能量之比提升2.38 個百分點,百公里油耗降低2.24%。驗證了所提出的基于最優回饋轉矩曲線的制動控制策略的有效性。
為進一步驗證所提出的串聯最優制動控制策略的有效性,分別以中國工況CHTC_TT 和某段省道工況進行仿真,工況信息分別如圖11和圖12所示。
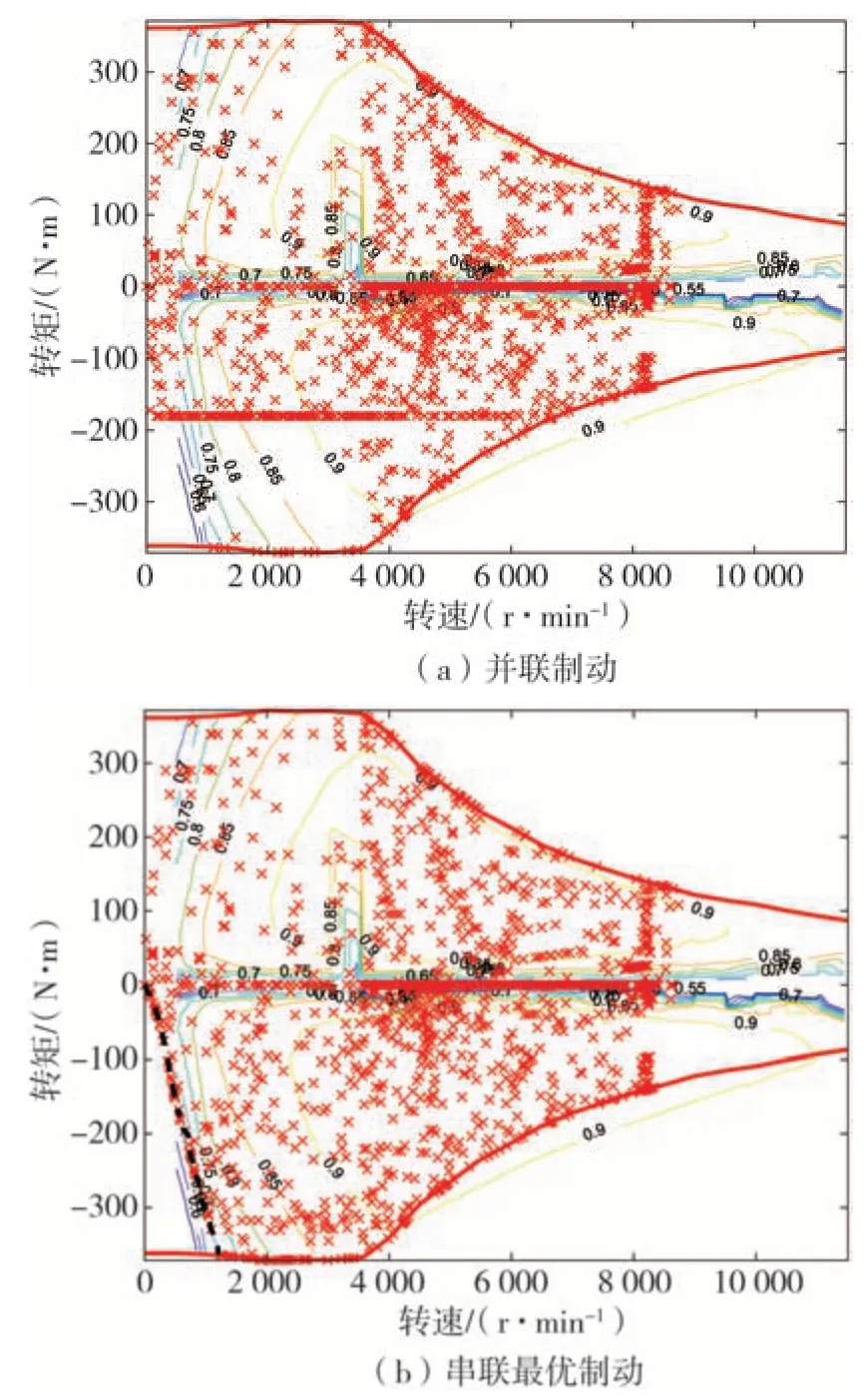
圖10 電機工作點分布
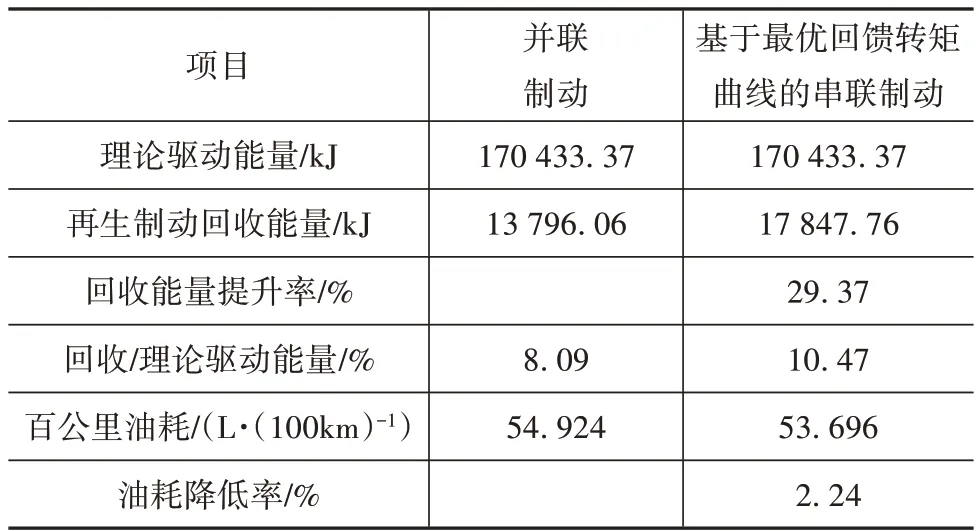
表3 不同制動控制策略下的仿真結果對比
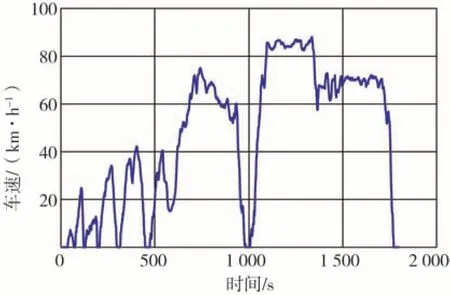
圖11 CHTC_TT工況信息
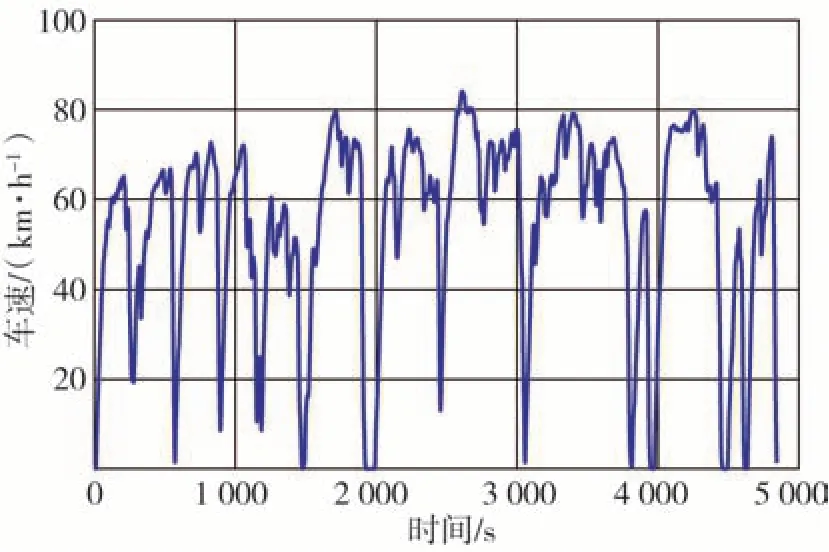
圖12 某段省道工況信息
采用電機最優回饋轉矩曲線的串聯最優制動控制策略時,在CHTC_TT 工況和省道工況下的電機制動時的工作點分布情況如圖13所示。由圖13可見,兩種工況下,當車速較低制動時,電機工作點均控制在了最優回饋制動轉矩曲線上,得以盡可能多地回收制動能量。
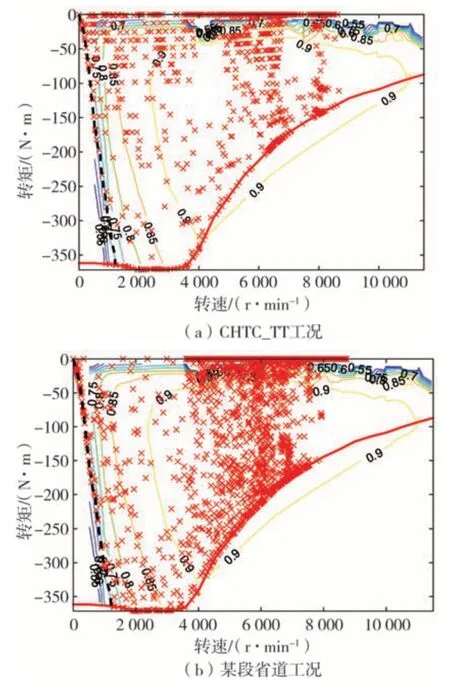
圖13 兩種工況下制動時電機工作點分布
在兩種工況下比較并聯制動與所提出的基于最優回饋轉矩曲線的串聯制動控制策略,百公里油耗與再生制動回收能量仿真結果如表4所示。
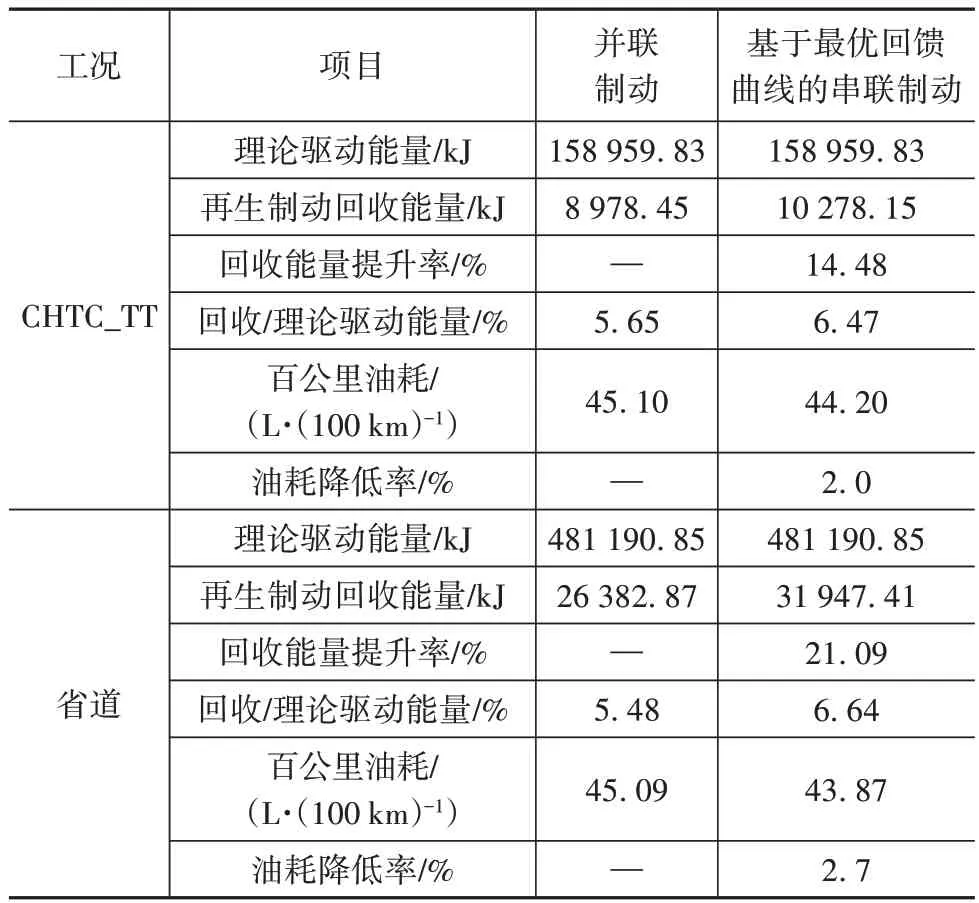
表4 不同行駛工況下仿真結果對比
由表4 可見,在CHTC_TT 循環工況下,與并聯制動控制相比,采用所提出的串聯最優制動控制策略的再生制動回收能量提升了14.48%,油耗降低了2.0%;在某省道工況下,再生制動回收能量提升率為21.09%,油耗降低率為2.7%。綜合表3 的仿真結果可以看出,在不同的仿真工況下,所提出基于最優回饋轉矩曲線的串聯最優制動控制策略均可明顯提升制動能量的回收率,從而降低油耗,提升車輛經濟性。
4 結論
(1)根據電機的等效電路模型和矢量控制方法,對車用內置式永磁同步電機的回饋制動狀態和耗能制動狀態進行分析,提出一種電機最優回饋轉矩曲線的求解方法,并基于最優回饋轉矩曲線制定了串聯最優制動控制策略,以實現理論最優的制動能量回收。
(2)分析了電動車和混合動力車常用的制動控制策略,對比并聯制動和串聯制動控制策略在能量回收效果和結構布置難度方面的差異;以不同循環工況對某P4 并聯混合動力商用車進行仿真,結果表明,采用所提出的基于最優回饋轉矩曲線的串聯最優制動控制的再生制動回收能量和經濟性比并聯制動控制策略明顯提升。所提出的最優回饋轉矩曲線的求解方法可為車輛再生制動系統控制策略的開發、制動模式切換門限值的確定等提供參考。
(3)所研究的P4 構型混合動力車輛僅通過后軸進行電力制動,因此所提出基于最優制動回饋轉矩曲線的串聯制動控制策略未考慮車輛制動時不同軸之間的制動力分配問題,新能源車輛制動時行駛穩定性與經濟性間的綜合考慮有待進一步深入研究。
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36