一種基于分布式光纖的自動配重的塔吊機電系統
2021-03-08 02:55:15楊瀾楊文超王婧
科學與財富 2021年6期
關鍵詞:智能
楊瀾 楊文超 王婧
摘 要:現如今城市化進程越來越快,使得市場上對塔機的需求也不斷增加。在工程實踐中,發現塔式起重機長期處于力矩不平衡容易翻折的問題,為此本文設計了一種基于分布式光纖的自動配種的塔吊機電系統,主要原理在塔身的周圍側立面上設置用于測量塔身應變的分布式光纖從而能根據起重臂和平衡臂兩端力矩平衡進行自動配重,實現智能化、自動化。
關鍵詞:分布式光纖;塔吊機電系統;自動配重;智能
引言
近年來,隨著經濟的不斷發展,裝配式建筑的發展對于大型塔吊的需求明顯增加。高層建筑的加速建造使得塔吊的安全問題越來越值得重視[1]。傳統塔機運用的技術主要是一次性配重的原理,這種不靈活的配重方式使得塔機長期處于一種力臂不平衡的狀態,容易發生事故。塔吊自身構造較復雜、作業環境惡劣等特種機械設備高風險屬性,一旦發生事故,會帶來巨大的損失,因此對其全過程進行安全管理和監測預警具有重大意義[2]。
1.解決方案的提出
傳統的塔式起重機大多數都采用一次性配重的方式。這種方式在對于起吊不同重量的物體時,不能很好的進行調節,從而出現在沒有工作時,平衡臂端的重量遠大于起重臂端的重量的狀況。
本文通過研究對塔機進行優化設計,設計出一種基于分布式光纖技術能根據起重臂和平衡臂兩端力矩平衡進行自動配重的塔機機電系統,在一定程度上提高了安全性,具有安全、智能化的特點。
2.系統結構
2.1塔身設計
塔身是整個結構的支撐,因為需要及時的測量塔身根據起吊不同重物的而發生的相應的變化,所以在塔身四周的側立面上設置了有用于測量塔身應變的分布式光纖。
2.2平衡臂結構
平衡臂的構建是整個結構的關鍵部分,平衡臂由懸臂體、配重體以及配重體位置的調整機構三個部分組成。懸臂體水平的固定在塔身上,配重體和配重體的調整機構都分別依附在懸臂體的上下表面。為了匹配不同重量的起吊物,設置有若干能在懸臂體上滑動的配重體。配重體主要包括滑臺座、配重塊、固定夾板等。在平衡力矩不平衡的狀況時,滑塊需要進行相應的移動,所以在懸臂體上設置有雙導向滑軌,使得移動更加的穩定。滑臺座安裝了相應的夾板,活動的夾板使得滑臺座進行相應的回轉,使得配重體能更加靈活的移動。
2.3整體架構連接
配重體位置調整機構位于懸臂體下方由調整電機、調整絲杠、調整滑塊等組成。軌道梁位于懸臂體正下方與懸臂體相平行,通過液壓伸縮桿吊裝連接在懸臂體下表面。調整電機水平固裝在軌道梁上表面,調整絲杠用于連接電機電軸和軌道梁,整體與軌道梁相平行。調整滑塊通過內部的絲母套裝連接在調整絲杠上,底部與軌道梁滑動接觸配合。調整滑塊頂部固定設置有棘爪凸塊,與配重體的滑臺座底部的棘爪凹槽插接配合,從而構成整個架構。
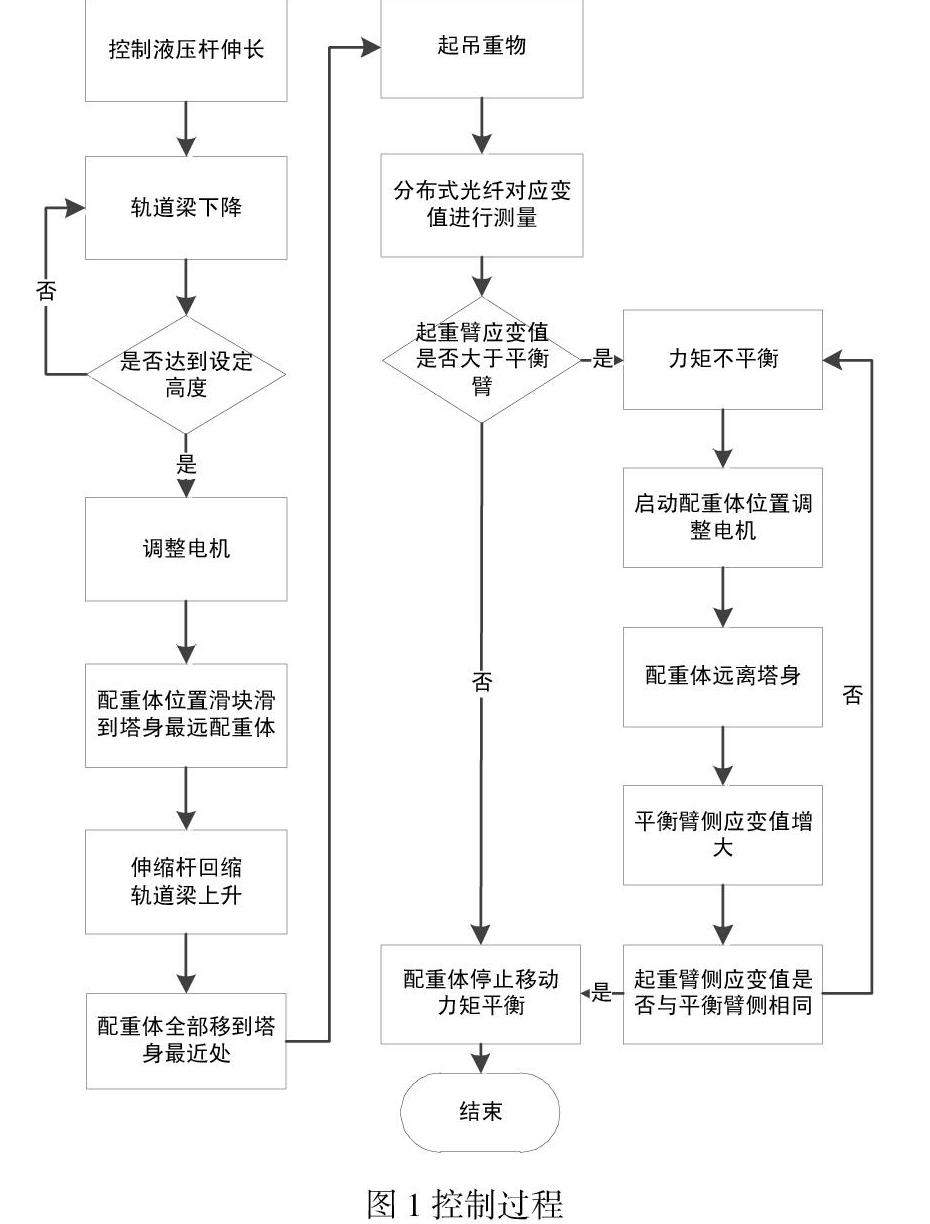
3.控制過程
3.1準備階段
在起吊重物之前,控制液壓的伸縮桿伸長,直到軌道梁下降到設定好的高度,此時棘爪凸塊頂部的高度低于滑臺座的下表面。
當軌道梁調整完后,啟動配重體的位置調整電機,帶動配重體位置調整絲桿轉動,調整滑塊沿軌道梁移動,直到移動到距離塔身最遠的配重體正下方。使棘爪凹槽正對,然后控制液壓伸縮桿的回縮,使軌道梁同步上升,直到棘爪凸塊完全插入棘爪凹槽內。
完成之后再次啟動配重體位置調整電機,帶動配重體位置調整絲杠轉動,帶動調整滑塊沿軌道梁并朝向塔身進行移動,最終帶動距離塔身最遠的配重體同步朝向塔身移動,而其余的配重體會被距離塔身最遠的配重體推著移動,直到所有的配重體全部移動到距離塔身最近的位置處。
3.2平衡力矩
在完成準備工作之后就可以進行起吊,隨著重物被吊起,起重臂一側的重量增大,此時位于起重臂一側的塔身側立面的應變將發生改變,分布式光纖對應變式的變化量進行及時測量。當起重臂一側塔身側立面的應變值超過平衡臂一側后,說明力矩不平衡,需要恢復平衡保障安全。重新啟動配重體位置調整電機,使距離塔身最遠的配重體遠離塔身移動。隨著配重體的移動,平衡臂一側塔身側立面的應變值會逐漸增大,當起重臂側的應變值與平衡臂側達到一致時,配重體停止移動,達到力矩平衡狀態。
如果距離塔身最遠的配重體移動到平衡臂最遠端時,力矩仍未達到平衡狀態,則控制軌道梁下降,使棘爪凸塊與距離塔身最遠的配重體上的棘爪凹槽脫離,然后控制配重體位置調整滑塊朝著塔身移動,直到棘爪凸塊移動到距離塔身第二遠的配重體下方,接著控制軌道梁上升,使棘爪凸塊插入上方的棘爪凹槽內。接下來控制配重體位置調整滑塊遠離塔身移動,并帶動距離塔身第二遠的配重體遠離塔身移動,此過程中平衡臂一側塔身側立面的應變值會進一步增大,直到該配重體停止移動,力矩達到平衡狀態。若距離塔身第二遠的配重體移動到平衡臂最遠端時,力矩仍未達到平衡狀態,調整剩余的配重體的位置,直到最終達到力矩平衡狀態。
4.總結
現如今塔機發生事故的概率也是日漸增大。提高塔機運作的安全指數已是勢在必行。必須從技術手段上加強對塔吊使用過程和行為有效的監督、切實預警以及安全控制,才能有效地防范和減少塔吊在運行過程中的危險因素和安全隱患。而該文章所講述的自動配重塔機機電系統在一定程度上發揮了作用,具有應用價值。在高效工作的同時保障了運作時塔機和工作人員的安全。具有安全、可靠、智能、自動等特點。
參考文獻:
[1] 余群舟,孫博文,駱漢賓,周榮,李亞巍.塔吊事故統計分析[J].建筑安全, 2015, 30 (11): 10-13.
[2] 郁志明. 塔吊安全監控系統的設計與研究[D]. 東北大學,2017.
*項目基金:本文是桂林電子科技大學2020年自治區級大學生創業訓練項目“塔吊其中機之惡能配重系統”的項目成果,項目編號是:202010595078
猜你喜歡
開放教育研究(2021年3期)2021-05-25 02:41:06
小學科學(學生版)(2020年12期)2021-01-08 09:28:04
裝備制造技術(2020年4期)2020-12-25 05:26:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
能源(2018年4期)2018-05-19 01:53:44