基于STM32自平衡立方體系統(tǒng)的設(shè)計
2021-03-07 18:19:04張明波王磊黃鋆李知承吳貴芳
科學與財富 2021年32期
張明波 王磊 黃鋆 李知承 吳貴芳
摘 要:主要介紹由STM32為核心部件設(shè)計形成的智能自平衡立方體系統(tǒng),本系統(tǒng)主要由四大模塊組成,分別是主控模塊、電源模塊、帶動量輪電機模塊和MPU6050模塊,并通過姿態(tài)解算與電機控制程序,配合自抗擾控制算法實現(xiàn)立方體單邊自動平衡,實驗表明,該系統(tǒng)能夠滿足自平衡的需求,且成本低,實現(xiàn)簡單。
關(guān)鍵詞:自平衡立方體,動量輪,模塊設(shè)計
1引言
目前控制領(lǐng)域的物體自平衡是單片機開發(fā)的重要應(yīng)用之一,且取得了顯著的成果。一般的自平衡項目選擇開發(fā)平衡小車,使用加速度傳感器、傾角傳感器、超聲波傳感器、電機控制等模塊協(xié)同配合,通過車整體的前后運動達到自平衡的目的。本次設(shè)計的自平衡立方體在包含加速度傳感器、傾角傳感器、一般電機模塊外,額外使用了動量輪作為立方體平衡的動力來源,取代平衡小車整體移位的平衡方式,采用角動量傳遞保持自身平衡。
該系統(tǒng)主要包括四大模塊,分別是主控模塊、電源模塊、電機驅(qū)動模塊和MPU6050模塊。
2系統(tǒng)各模塊設(shè)計
2.1主控模塊
STM32F103RCT6是一種嵌入式-微控制器的集成電路,基于使用Cortex-M3內(nèi)核,是一個32位處理器內(nèi)核,采用了哈佛結(jié)構(gòu),擁有獨立的指令總線和數(shù)據(jù)總線,可以讓取指與數(shù)據(jù)訪問并行不悖,可以滿足自平衡立方體的控制需求。
2.2電源模塊
電源模塊方塊采用12V航模電池作為初始電源,經(jīng)LM2596T芯片轉(zhuǎn)換后為系統(tǒng)提供穩(wěn)定的5V電壓輸出,為后續(xù)的各個模塊供電
2.3電機驅(qū)動模塊
TB6612FNG是東芝半導體公司生產(chǎn)的一款直流電機驅(qū)動器件,它具有大電流MOSFET-H橋結(jié)構(gòu),雙通道電路輸出,可同時驅(qū)動2個電機。它無需外加散熱片,外圍電路簡單,只需外接電源濾波電容就可以直接驅(qū)動電機,利于減小系統(tǒng)尺寸。對于PWM信號輸入頻率范圍,高達100kHz的頻率更是足以滿足我們大部分的需求。AO1和AO2分別接到電機的+和-。然后通過PWMA、AIN2、AIN1控制電機。其中PWMA接到單片機的PWM引腳,一般10Khz的PWM即可,并通過改變占空比來調(diào)節(jié)電機的速度。本項目開發(fā)僅使用其中一路驅(qū)動。
2.4 MPU6050模塊
MPU6050為全球首例整合性6軸運動處理組件,相較于多組件方案,免除了組合陀螺儀與加速器時間軸之差的問題,減少了大量的封裝空間。芯片也包含豐富的軟件封裝庫,開發(fā)較簡單。
3系統(tǒng)控制算法設(shè)計
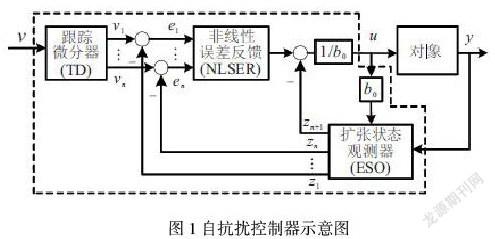
系統(tǒng)采用自抗擾控制算法,該算法是以系統(tǒng)設(shè)定值、系統(tǒng)被控輸出和上一步計算出的控制量為其輸入,確定出新的控制量的控制方法,由跟蹤微分器、擴張狀態(tài)觀測器和非線性狀態(tài)誤差反饋構(gòu)成。自抗擾的機理在于將作用于被控對象的所有不確定因素歸結(jié)為擾動,利用對象的輸入輸出數(shù)據(jù)對總擾動進行估計補償,如圖1所示。
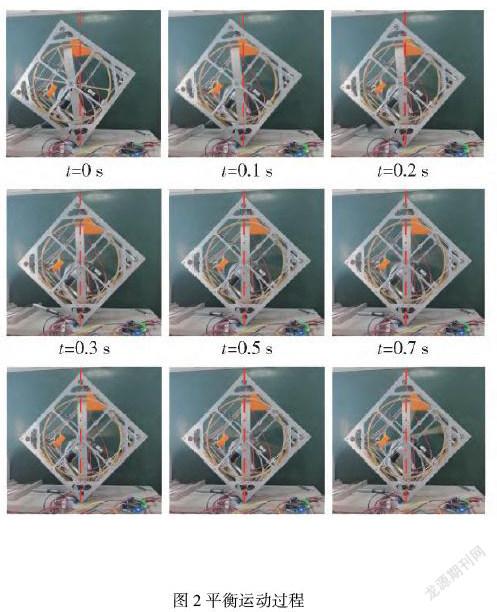
本文設(shè)計了一種自平衡立方體,從硬件、軟件以及算法分別進行研究,通過姿態(tài)解算與PWM電機控制程序,配合自抗擾控制算法實現(xiàn)立方體單邊自動平衡。本設(shè)計成本較低,具有較好的人機交互特性,調(diào)節(jié)簡單等優(yōu)點。
參考文獻
[1].劉旭航,劉小雄,章衛(wèi)國,等. 基于加速度修正模型的無人機姿態(tài)解算算法[J]. 西北工業(yè)大學學報,2021,39(1):175-181.
[2].宋吉廣,王繼銘,梁利華,等. 舵鰭聯(lián)合自抗擾主從控制策略設(shè)計[J]. 控制理論與應(yīng)用,2021,38(2):264-274.
[3].張釗,楊忠,段雨瀟,等. 主動變形四旋翼自抗擾飛行控制方法[J]. 控制理論與應(yīng)用,2021,38(4):444-456.
作者簡介:張明波(2000.04-),男,漢族,山西長治人,本科生。
河南科技大學SRTP項目基金支持:2021094
3867500589247