基于NB-IoT的近海漁網示位標系統
2021-03-05 08:08:54徐軼群
集美大學學報(自然科學版) 2021年6期
關鍵詞:設備
關 立,徐軼群
(集美大學輪機工程學院,福建 廈門 361021)
0 引言
漁網示位標安裝于漁網、定制網具或養殖網箱上,利用AIS技術向漁民指示網具的位置,為漁業捕撈和養殖提供一定的便利[1]。然而,目前市面上的基于AIS技術的漁網示位標缺乏統一標準,漁民或廠商隨意配置其水上移動業務標識(MMSI)及其他參數[2],導致在電子海圖中難以區分漁網和船舶,影響船舶交通安全。研究解決漁網AIS示位標問題不僅可以保障船舶交通安全,而且可提高海上搜救、海事監管工作的效率。鄭峰[3]設計了基于AIS技術的漁具定位避碰裝置;劉鐵君等[4]提出漁網AIS示位標采用主從模式,單張漁網只掛載一個主設備接入AIS系統,從設備使用AIS技術與主機通信方面來減少船臺顯示,而這種方式雖然降低了發送設備數量,但發送數據總量并無顯著減少,無法解決AIS信道時隙占用的問題;黃倫文等[5]采用406 MHz衛星通信的方式設計了一種基于北斗應急無線電示位標,但該方案成本較高且數據更新效率較低;王連勝等[6]設計了一種基于GPRS通信方式的一鍵式緊急無線電示位標,可應用在漁網定位領域,該方案采用的是自有協議及自建數據平臺。
NB-IoT(Narrow Band-internet of things)作為新興物聯網技術,可以提供廣覆蓋、低功耗、低成本、多連接的網絡服務,相比LTE和GPRS基站有20 dB的增益提升[7],在內河流域及近海都有不錯的網絡覆蓋。通過PSM(power saving mode)模式與eDRX(extend discontinuous reception)技術的搭配,設備得以在低功耗狀態下長期工作。
目前數據服務器和云平臺的搭建主要有兩種形式:1)獨立搭建數據服務器,構造私有云平臺,該形式在數據協議上靈活可控,數據保密性更高,但開發周期長,難度大,針對設備數量龐大的系統并發處理復雜,不利于應用的快速上線;2)采用運營商服務器及標準的物聯網開發平臺,如阿里云、百度云、OneNET等,該形式系統部署快速,用戶不必考慮復雜接入過程,對不同平臺兼容性更強,但用戶數據傳輸必須通過物聯網平臺,存在商業風險,且數據接入商業用途后運營商可能收取使用費。
本文設計的漁網NB示位標選擇NB-IoT技術作為通信手段,選擇中移物聯的OneNET云平臺作為云服務平臺開發端。設備通過窄帶網絡將漁網示位標的坐標及電量等相關信息上傳到OneNET云平臺,供相關用戶查看,目標用戶可以通過OneNET云平臺對設備數據上報周期,工作狀態等相關參數進行遠程配置。由于示位標工作頻段不在AIS信道上,對現有AIS系統不會造成干擾,對船舶交通、海上搜救、海事監管等方面有著積極作用。此外,本設備使用的功耗控制策略與動態休眠算法,比傳統的固定數據上報周期模式在續航上有更大優勢。
1 系統架構
基于NB-IoT與云服務平臺的漁網示位標系統主要包括:北斗/GPS導航衛星、漁網NB示位標、NB基站、OneNET云平臺及應用服務器、終端用戶5個部分組成,如圖1所示。
其中,漁網NB示位標通過北斗/GPS雙模天線接收北斗/GPS衛星信號,解析獲得NMEA0183協議GPRMC報文,提取并保存其中的時間、經緯度等所需數據。通過12位ADC獲取電池平均電壓,基于電池電量曲線表得出設備當前電量。在設備入網后,以物聯網專用的LWM2M協議格式注冊到OneNET云平臺。OneNET云平臺響應各個漁網NB示位標的注冊,并下發發現資源命令及轉發應用服務器請求訂閱命令。漁網NB示位標注冊在網后,通過OneNET云平臺將相關數據信息上報給應用服務器。應用服務器以OneNET云平臺作為橋梁,獲取漁網NB示位標上報信息,并下發控制命令,形成面向用戶的漁網公共服務管理系統,實現數據可視化與指令控制。用戶通過web頁面登錄應用服務器,即可查看設備的地理位置等信息,擁有權限的目標用戶可以向指定的漁網NB示位標下發控制指令,如調整上報時隙,改變工作狀態等,實現遠程控制。
2 漁網NB示位標設計
2.1 漁網NB示位標硬件設計
漁網NB示位標硬件主要由單片機與串口電路、北斗/GPS雙模定位與NB通信模組電路、充放電及電源管理電路三個部分構成。
2.1.1 單片機與串口電路
單片機及外圍控制口、串口電路原理圖如圖2所示。選用ST公司STM32L031系列單片機作為主控制器,該單片機在待機模式下功耗僅為0.25 uA,并具備低功耗串口通信功能[8](LPUART),負責控制NB模組數據收發以及定位數據接收。串口2連接CH340芯片,實現串口轉USB調試、數據打印等功能。通過內部12位ADC管腳BAT_ADC以及電路導通控制管腳BAT_CHECK實現對供電電壓的實時監測。BC20_PWR、BC20_RST、BC20_EINT、BC20_GNSS_POWER管腳分別用于控制NB通信模組的供電、重啟、喚醒功能以及為GNSS(global navigation satellite system)有源天線供電。

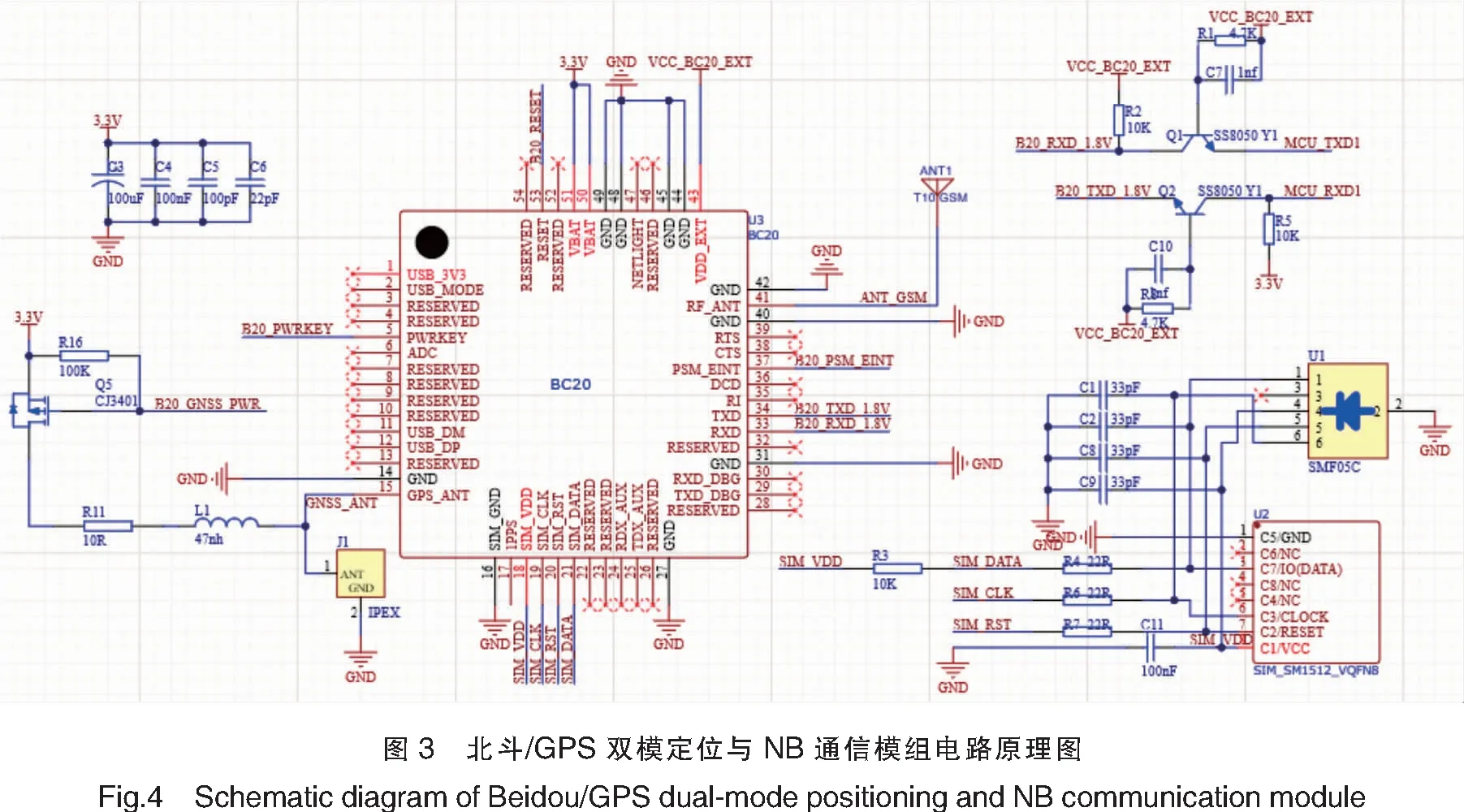
2.1.2 北斗/GPS雙模定位與NB通信模組電路
北斗/GPS雙模定位與NB通信模組電路原理圖如圖3所示。NB通信模組選用上海移遠公司開發的BC20模組,該模組接收機集成了北斗、GPS定位功能,可以實現多系統聯合定位[9],其衛星信號捕獲狀態下耗流為54.7 mA,跟蹤狀態下耗流30.2 mA,而當設備進入PSM工作模式時,耗流僅為3.7 uA。在與基站通信時,BC20模組在B5及B8頻段上發射功率可達23 dBm,接收靈敏度為-129 dBm。模組在發射時段瞬時電流可達260 mA,設計時在其供電管腳VBAT附近并聯了大容量去耦鉭電容。BC20模組串口采用1.8 V電平,經過電平轉換電路后與主控制器串口連接。在模組處于PSM模式下,其1.8 V供電輸出管腳VCC_BC20_EXT無輸出,串口無法正常通信,使用時通過引腳BC20_PSM_EINT喚醒后再進行串口通信,重新配置其工作狀態。SIM卡選用貼片式5 mm×6 mm esim封裝,減小設備體積,提高抗震能力。
2.1.3 充放電及電源管理電路
充放電及電源管理電路原理圖如圖4所示。漁網NB示位標使用3.7 V鋰電池供電,充電接口采用市面上通用的USB TYPE-C接口,充電管理芯片選用TP4065,并選用ME6211C33M5G芯片作為LDO(low dropout regulator),將鋰電池電壓轉換為主控器及NB通信模組工作電壓。需要采集鋰電池電壓時,BAT_CHECK管腳拉高,導通Q3與Q4,通過主控ADC管腳采集R14、R15分壓數據,采集完成后,關斷數字三極管及場效應管,降低設備功耗。設備通過PWR_STATE管腳監測按鍵SW1狀態,并通過控制PWR_CTRL管腳改變LDO使能管腳電平,實現按鍵關機功能。當設備安裝于養殖網箱等長期海上作業體上時,可裝配太陽能板實現長續航。

2.2 漁網NB示位標軟件實現
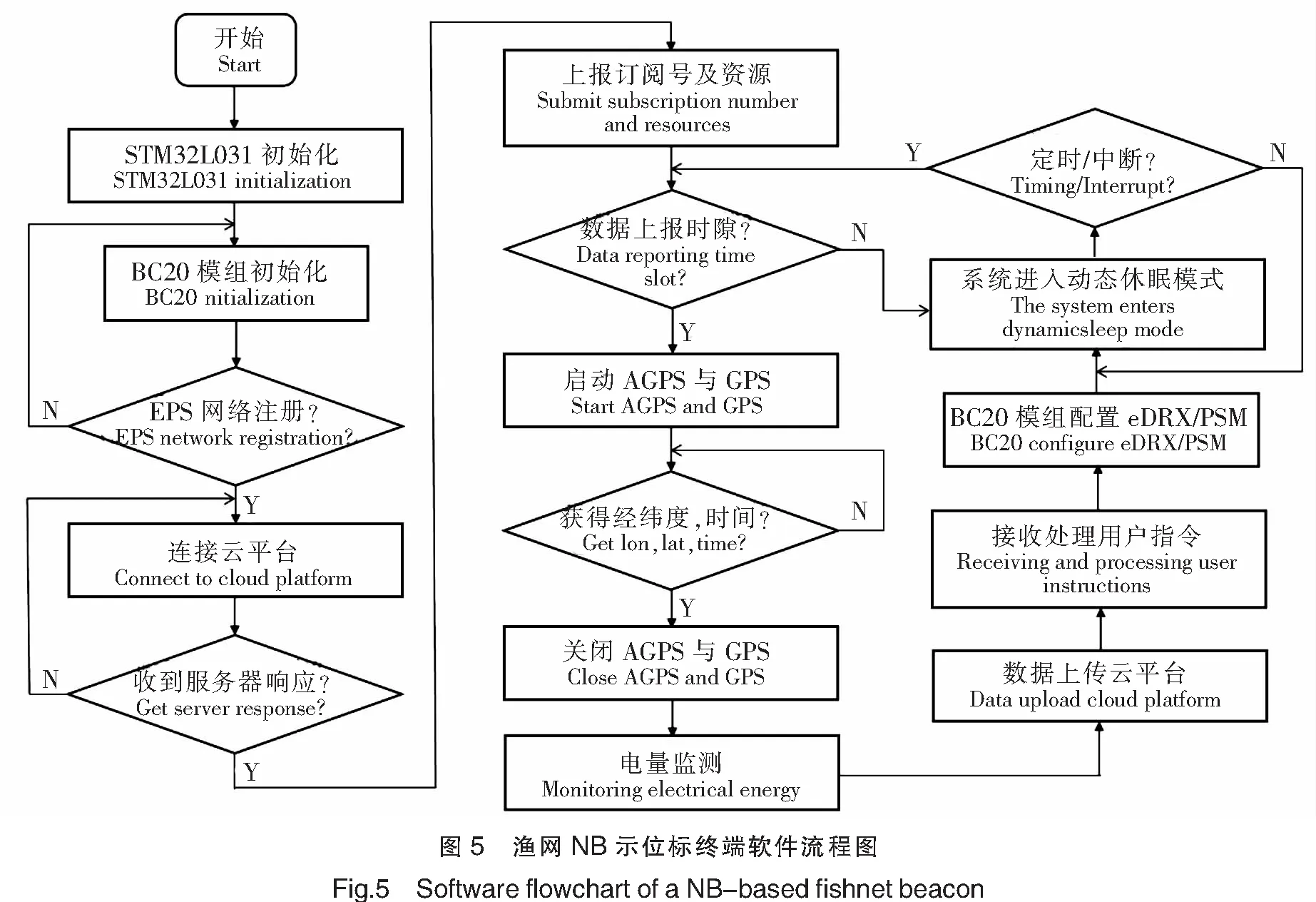
漁網NB示位標軟件主要基于STM32L031低功耗單片機與集成GNSS定位功能和NB窄帶物聯網通信功能的BC20模組,采用C語言開發,編譯環境為Keil V5.26,軟件主流程圖如圖5所示。
2.2.1 工作流程實現

通過開機按鈕為設備上電后,主控制器進行初始化操作,并控制IO口保持供電電源,在接收到用戶關機命令時,可通過控制此IO口實現遠程關機。初始化BC20模組時,設備獲取NB信號RSSI與EPS網絡狀態,注冊到云平臺,并根據云平臺服務器的響應上報訂閱號與資源類型。設備根據配置的數據上報周期啟動AGPS和GNSS,獲取經緯度及時間信息,并對電池電壓進行采樣,通過內部存儲的電量電壓匹配數組獲取百分比形式的電量,再將相關數據逐一上傳至云平臺。同時,設備如果收到下行指令,則根據指令運行對應線程,如調整數據上報周期,改變工作狀態,或者強制關機等。未收到下行指令,設備將在上報數據成功后,進入動態休眠模式,并開啟外部與定時器中斷,等待下次中斷或上報時隙。程序中循環判斷語句均添加了重試次數及錯誤處理函數,并添加了看門狗,提高設備運行穩定性。
2.2.2 功耗控制策略
設備不同工作狀態下功耗狀態如圖6所示。分為5種運行狀態:PSM為休眠態;receive為接收態;location為定位捕獲態;transmit為通信態;IDLE為不連續接收態。由圖6可知,設備能耗主要集中在獲取定位、數據上傳、數據接收過程中。為使設備在滿足響應服務器下行命令時延情況下同時具備低功耗,軟件采用eDRX技術,通過擴展的不連續接收模式來降低設備功耗,在eDRX周期內,向服務器申請較短的尋呼時間窗PTW(paging time window),縮短無數據交互期。在設備定位數據獲取與上報周期內,設計動態休眠算法,建立設備上報時隙控制傳遞函數。
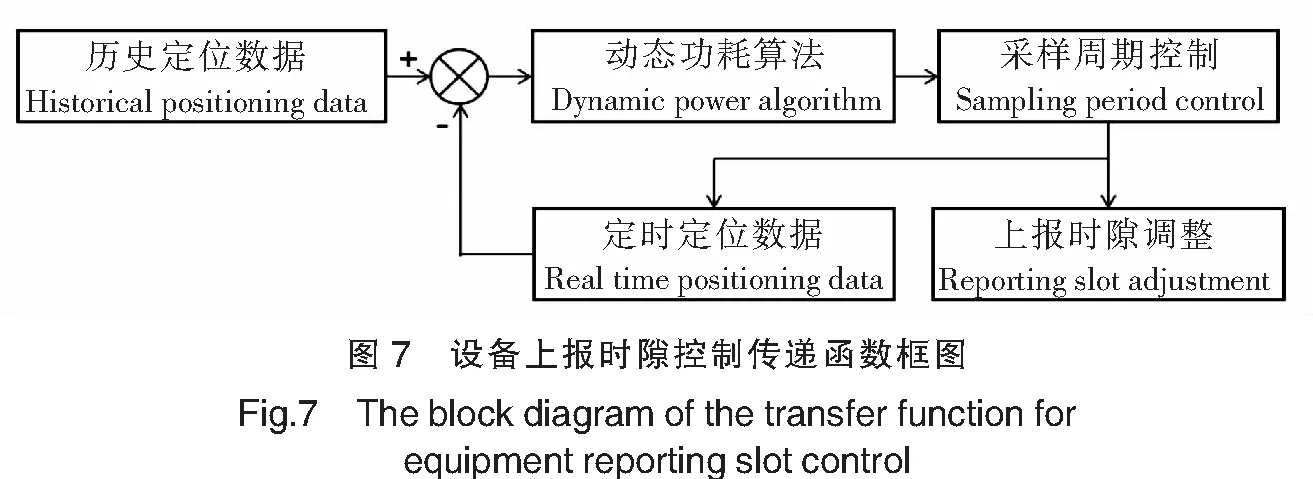
設備上報時隙控制傳遞函數框圖如圖7所示。其工作原理為:設備在啟動后首先采集設備初始經緯度數據,之后根據預設上報時隙在第n次規定時間采集經緯度數據后,根據初始經緯度數據計算得出目前位置與初始位置水平偏移量Dn和與上一位置水平偏移量Dn-1之差dDn,根據Dn與dDn的值改變定位數據采樣頻率,并相應調整數據上報周期Tr(Tr初始值取300 s)。當位置偏移量Dn不超過設備水平定位精度Dcep時,可認為設備地理位置不變,則延長數據上報周期Tr,增加量Ta取值為設備的eDRX周期。當位置偏移量Dn超過限定閾值時,若dDn<0,說明示位標運動軌跡在回歸起始點;若dDn=0,說明示位標在偏移初始坐標的某點處于靜止狀態;若dDn>0,說明示位標在快速遠離初始坐標點,此時應縮短數據上報周期Tr,提高設備數據實時性。
建立的動態數據上報周期Tr模型如下:
(1)
3 漁網NB示位標的制作與測試
3.1 定位精度測試及功耗測試
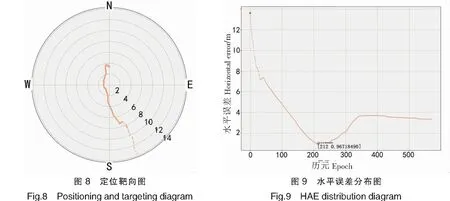
為測試漁網NB示位標基本功能的穩定性與可靠性,制作了設備樣機,并在測試平臺上對樣機定位精度和功耗進行測試。將設備靜置,對其定位數據進行統計,在570次定位中,水平定位誤差基本在10 m以內,數據可以準確反映設備的真實地理位置,定位靶向圖如圖8所示,水平誤差分布圖如圖9所示。
根據漁網NB示位標運行的軟件設計,其數據上報周期Tr可分為定位通信區間Ta與休眠區間Td,即:
Tr=Ta+Td。
(2)
則單時隙耗電量Er(m·Ah)與時間Tr的關系可寫為:
Er=Ia×Ta+Id×Td=Ia×Ta+Id×(Tr-Ta)。
(3)
其中:Ia為定位通信區間的平均電流;Id為設備休眠電流。
使用是德科技N6705電源分析儀配備N6781模塊對漁網示位標工作下的耗電量進行測量,獲得完整的定位通信區間電流消耗,如圖10所示。設備在休眠區間下的電流消耗Id僅為0.09 mA;定位開啟時電流為80 mA,從開啟定位到獲得有效定位耗時平均約16 s(開啟AGPS);數據發送時全設備電流最高可達270 mA,每個數據包發送耗時約0.14 s;設備的定位通信區間Ta平均約為54 s,區間平均電流Ia為34.0 mA。以配備3000 m·Ah的鋰電池,上報時隙固定300 s為例,不使用功耗控制策略,設備可于海域內靜置連續工作484 h,約20 d;在使用功耗控制策略與動態休眠算法時,當設備的eDRX周期取值為81.92 s,且考慮設備位置偏移量基本小于設備水平定位精度的情況下,設備連續工作時間可長達2 701 h,約112 d。因此在設備長期處于靜止狀態下,采用動態數據上報周期模型續航最高可以提高約4.6倍。

3.2 水域安裝測試
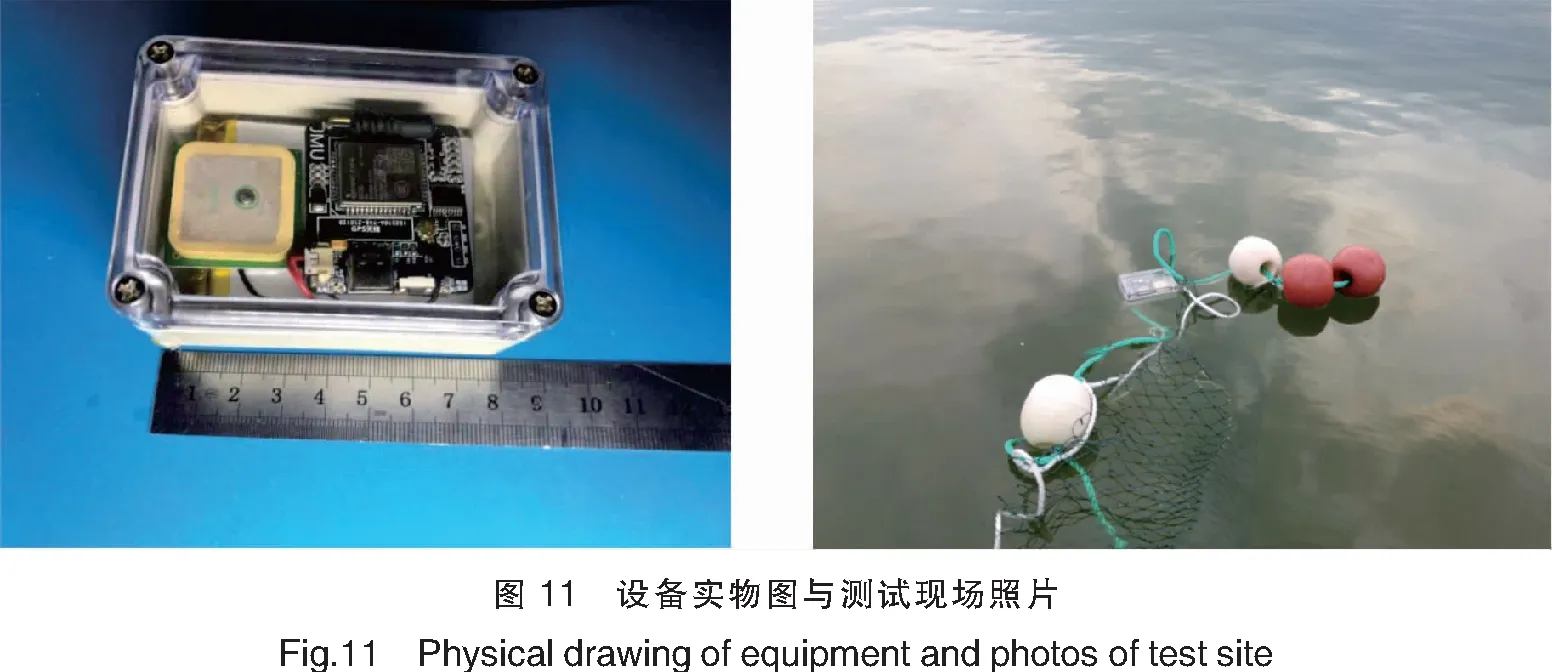
選擇廈門集美園博苑內海水域對漁網NB示位標進行工作狀態和功能測試,將設備與漁網固定,放置于水域中,設備實物圖與測試現場照片如圖11所示。測試人員通過手機端查看漁網所在位置,并對電量、經緯度數據進行監控,對快速尋標等控制功能也進行了測試。經測試,設備能夠準確反映漁網的實時位置,并將數據及時上傳回云端,對遠程控制命令的響應也十分迅速,能夠滿足設計功能的要求。
4 基于OneNET的漁網位置公共服務平臺設計
OneNET云平臺是中移物聯有限公司開發的一款免費的物聯網開放平臺[10]。該平臺面向應用層,提供豐富的API和數據分發能力,開發者可根據平臺提供的標準接入流程將設備接入平臺[11]。OneNET云平臺在應用管理上提供了BS架構的WEB網頁及手機端[12]可視化界面開發套件,可以適應不同需求的應用開發。本文使用該平臺提供的NB-IoT物聯網套件,通過LWM2M協議接入,使用該套件自帶的應用編輯器,實現基于OneNET的漁網位置公共服務平臺設計。
4.1 手機端個性化應用
漁民作為漁網NB示位標的主要使用群體,根據其職業特點與用戶習慣,在界面交互、功能設計、操作方式、顯示效果上進行了專門優化,讓用戶能充分了解并利用漁網數據輔助決策,提升捕魚和養殖效率。終端用戶手機端操作界面分成三個頁面,如圖12所示。
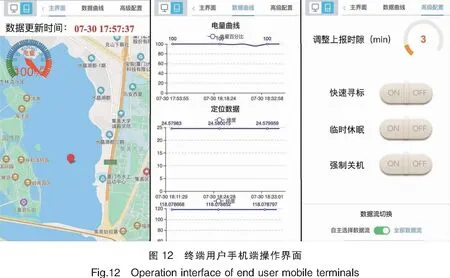
用戶在登錄平臺后立即顯示主界面,該界面包含可視化漁網定位地圖、設備剩余電量百分比顯示以及數據更新時間,用戶可以直觀查看漁網所在位置以及設備電量剩余,通過縮放地圖可以獲得更加精確的位置信息,通過數據更新時間估計設備地理位置的時效。
通過菜單欄可切換至數據曲線界面,通過電量變化曲線可以預估設備剩余使用時間,通過經緯度變化曲線可知漁網位移區間,判斷是否被水浪或漁船帶離原有位置,以便進行現場處理,及時止損,提高效率。
設備高級配置界面提供了快速尋標功能、調整上報時隙功能、臨時休眠功能、強制關機功能、數據流切換(多個示位標數據切換)功能。其中快速尋標功能在漁民收網或尋網時使用,通過應用服務器下發命令,可以在有限時間內將定位數據更新速率提高到3 s/次,使定位數據趨于實時。調整數據上報時隙功能可以手動調整漁網NB示位標上報數據的周期,范圍為3~100 min可調,便于漁民將示位標應用于不同使用場景。臨時休眠功能用于設備暫停上報定位數據時,以降低功耗。強制關機功能可以使設備直接斷電,只能通過設備電源鍵重新開機。數據流切換功能可以實現多個可控示位標的控制切換,在用戶擁有多個漁網NB示位標時可以通過切換數據流來監控不同ID設備。
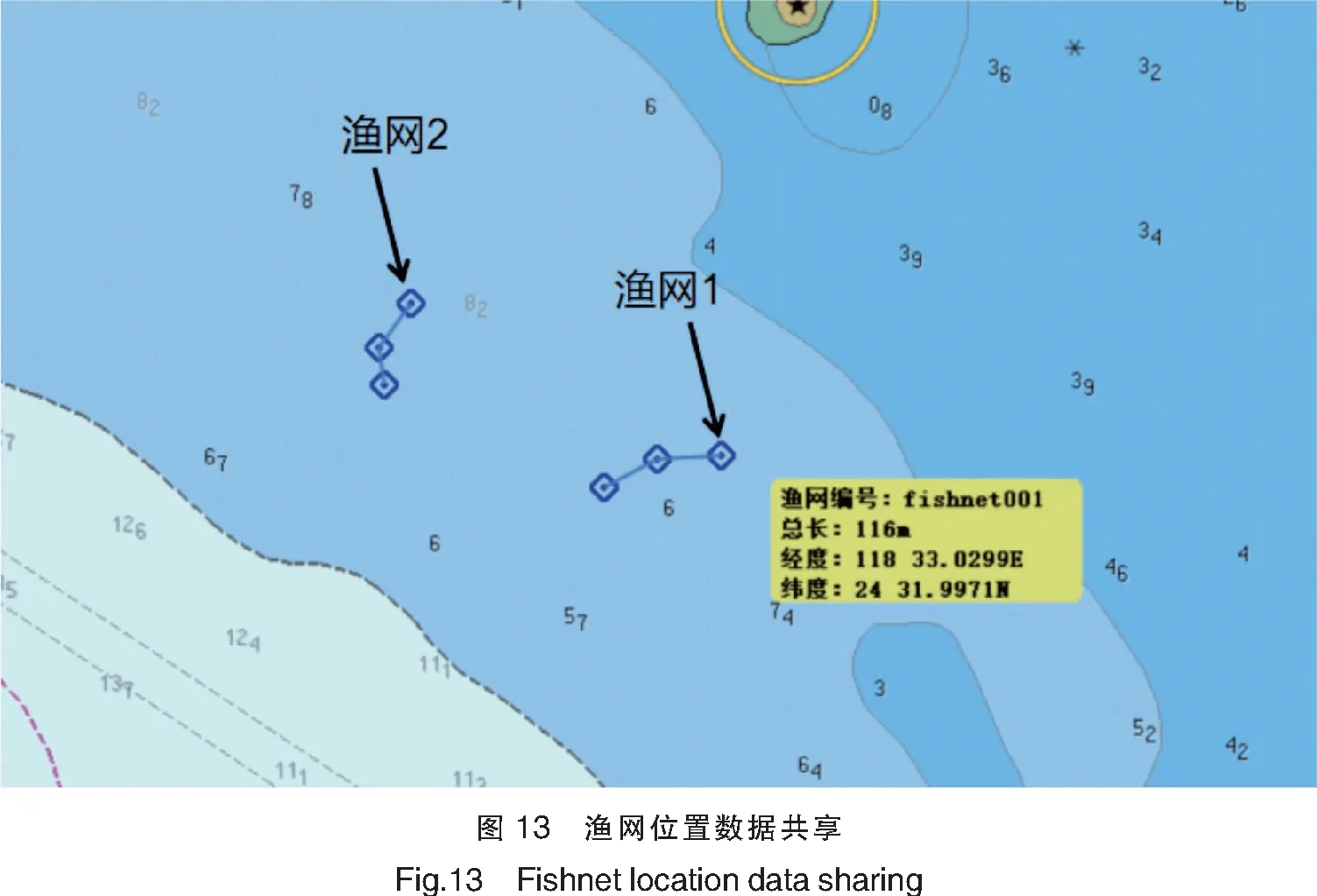
4.2 漁網位置數據共享服務
通過漁網位置數據共享服務,用戶可以查看全網漁網NB示位標的具體分布情況,如圖13所示。通行船舶可通過平臺查看航線內是否存在漁網,以便及時避讓,監管部門可以通過平臺查看通航區內是否存在違規布網,或有漂網在水流作用下進入航道內,方便及時采取措施,保障船舶交通安全。
5 結語
論文基于NB-IoT與OneNET云平臺技術,設計開發了漁網NB示位標系統,并通過測試平臺和沿岸海域安裝測試實驗,對系統的可靠性和有效性進行了驗證。測試結果顯示,設計的漁網NB示位標系統可以滿足漁網定位監控功能,與傳統AIS網位儀相比,具有體積小,功耗低,抗干擾能力強等優點,對漁民尋網、漁網監控及位置共享都有積極作用。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
當代工人(2020年13期)2020-09-27 23:04:20
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年10期)2018-08-04 03:24:48
家庭影院技術(2017年11期)2017-12-20 08:10:57
工業設計(2016年12期)2016-04-16 02:52:00
IT時代周刊(2015年8期)2015-11-11 05:50:37
汽車維修與保養(2015年1期)2015-04-17 03:25:28
設備管理與維修(2015年12期)2015-04-09 06:57:00