多頻線譜激勵下的混合自適應微振動主動控制?
2021-03-03 11:29:08方昱斌朱曉錦高志遠張合生苗中華
振動、測試與診斷 2021年1期
方昱斌, 朱曉錦, 高志遠, 張合生, 苗中華
(上海大學機電工程與自動化學院 上海,200072)
引 言
近年來,隨著科技發(fā)展和設備制造精度的要求越來越高,結構振動控制問題引起廣泛關注[1-2]。振動主動控制(active vibration control,簡稱AVC)比被動隔振具有更多優(yōu)勢,日益受到重視[3-4]。在振動主動控制領域,F(xiàn)xLMS 算法因其簡單易用、自適應能力強,成為常用的自適應結構振動主動控制算法之一[5-6]。通常,引起振動的擾動源往往是幾個甚至多個窄帶頻譜干擾源的疊加,存在多頻線譜激勵下的振動控制問題。FxLMS 算法對于多頻線譜擾動下的振動控制效果并沒有其在單一頻譜振動控制中好。為了提升抑振效果,一般采用增加濾波器階數的方法[7],但這樣會增加運算量,不利于系統(tǒng)的實時性。特別是在窄帶擾動頻譜間隔較小的多輸入多輸出(multiple input multiple output,簡稱MIMO)振動主動控制系統(tǒng)中,控制器的計算量會呈幾何倍數增長[8],對于系統(tǒng)硬件有較大壓力。可以采用基于頻域的自適應濾波方法,但該算法實現(xiàn)較為復雜[9]。
針對多頻窄帶抑制問題,在噪聲主動控制領域Ziegler 提出了并聯(lián)自適應濾波結構控制算法[10],通過并聯(lián)多個獨立自適應濾波器將多頻窄帶抑制問題分解成為多個單頻窄帶抑制問題[11-13]。隨后,并聯(lián)結構自適應算法被引入到結構振動主動控制中。文獻[14-16]將傳感器采集到的參考信號通過多個窄帶濾波器濾波之后,得到多個單頻窄帶參考信號。
在并聯(lián)自適應濾波結構控制算法中,如果參考信號與擾動的頻譜完全一致,則可以取得較為滿意的抑振效果。如果兩者之間的頻譜有偏差或者不匹配,控制效果會大幅下降甚至失效,即頻率失配[10]。在實際生產過程中,窄帶擾動的頻譜可能會隨著時間發(fā)生漂移[17-18],也可能會有寬頻的測量噪聲混在參考信號中,這些都會影響并聯(lián)結構算法的控制效果。針對并聯(lián)自適應濾波控制算法的頻率失配問題,學者們進行了相關研究。Liu 等[10]應用自適應正交振蕩器來確保擴散特征值最小,提升了算法的收斂速度。Xiao 等[11]引入自適應調頻的方法,通過自適應調節(jié)信號發(fā)生器生成的參考信號頻率追蹤擾動頻率,以提升整體算法的自適應性和魯棒性。Jeon 等[19]基于最小方差準則,設計了一個參考信號頻率估計子系統(tǒng),提升了算法的收斂速度。Kukde等[20]將人工神經網絡方法引入到參考信號頻率估計子系統(tǒng)。上述對于并聯(lián)自適應濾波控制算法的頻率失配問題的改進方法都是基于參考信號的自適應頻率估計,但引入的自適應過程大幅增加了算法整體的計算量,且上述算法都是基于前饋控制結構的。實際上,反饋自適應控制對于寬頻擾動的抑制有自身結構的優(yōu)勢[21]。在實際振動控制系統(tǒng)中,前饋濾波中的參考信號的取得并不容易,且獲取過程中存在不確定因素[22],而誤差信號中蘊含著比參考信號更準確、豐富的信息且容易測得。
筆者首先以傳統(tǒng)并聯(lián)結構FxLMS 算法為基礎,針對其在抑制擾動信號頻譜偏移及寬頻譜噪聲所引起振動時的限制和不足,提出一種混合自適應振動主動控制算法,通過增加反饋通道來提升算法的抑振性能;其次,考慮到參數自適應算法在振動控制中的魯棒性,采用后驗誤差代替現(xiàn)有的先驗誤差來更新迭代濾波器權值,以提升算法的魯棒性能[23];然后,給出了混合自適應振動主動控制算法的穩(wěn)定性和收斂性分析,在Adams 軟件中建立微振動主動隔振平臺虛擬機,通過與Simulink 軟件聯(lián)合仿真,對比驗證混合自適應振動主動控制算法在結構微振動控制中的有效性;最后,建立結構微振動主動控制實驗系統(tǒng),在多種擾動情況下針對單輸入單輸出(single input single output,簡稱SISO)微振動主動控制進行了實驗研究。實驗結果表明,混合自適應振動主動控制算法能夠有效抑制多個窄帶頻譜擾動所引起的結構微振動,相對于并聯(lián)結構FxLMS算法具有更好的抑振效果和魯棒性。
1 多頻線譜激勵下振動主動控制算法
1.1 并聯(lián)結構FxLMS 算法
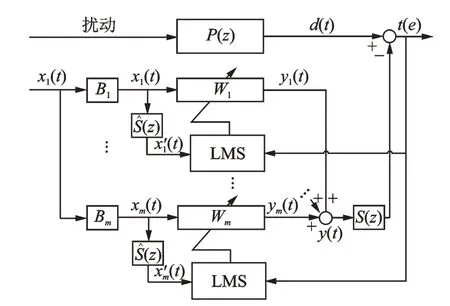
圖1 并聯(lián)結構FxLMS 算法振動主動控制系統(tǒng)框圖Fig.1 The structure of parallel-form FxLMS algorithm in AVC application
圖1 為并聯(lián)結構FxLMS 算法振動主動控制系統(tǒng)框圖。假設擾動源包含有M個窄帶頻譜成分,中心頻率為fm,m=1,2,…,M。圖1中的P(z) 和S(z)分別為振動主動控制系統(tǒng)的主振通道和次級通道,表示為

次級通道S(z)包含了從控制器輸出到誤差信號采集的所有通路,包括D/A、功率放大器、微振動結構中的作動通路、誤差傳感器、信號調理器及A/D 環(huán)節(jié)。S?(z)為次級通道S(z)的數學估計。控制系統(tǒng)中共有M個獨立的并聯(lián)子控制器,其控制輸出之和為并聯(lián)結構FxLMS 算法的總輸出,即

參考信號x(n)通過多個帶通濾波器Bm,m=1,2,…,M濾波之后,被分解為不同頻帶上的單頻參考信號xm(t),同時,自適應濾波器Wm的迭代更新為

其中:μm為第m個前饋通道的濾波器更新步長。
第m個前饋通道上的濾波參考信號x'm(t)為

1.2 混合自適應振動控制算法
并聯(lián)結構FxLMS 算法屬于前饋自適應振動控制的范疇,由于其在處理擾動頻率失配及寬頻譜噪聲時的限制,故筆者提出一種混合自適應振動主動控制方法,提升原有算法的抑振性能。傳統(tǒng)的Fx-LMS 算法采用先驗誤差更新權值,即權值系數W(n+1)是依據誤差信號e(n)計算得到。此時,F(xiàn)xLMS 算法的步長選擇需要保證在一定的收斂條件內。如果采用后驗誤差去更新,即權值系數W(n+1)是依據后驗誤差信號ep(n)計算得到,算法步長的收斂條件可以放松,對于混合自適應算法的參數魯棒性和收斂速度有大幅度提升[23]。考慮到后驗誤差LMS 算法在魯棒性方面的優(yōu)越性,將原有算法中的參數自適應方法改為后驗誤差LMS 算法,放寬了算法中步長因子的取值范圍,提升算法的參數魯棒性[23]。
圖2 為混合自適應振動主動控制方法的系統(tǒng)框圖。假設擾動信號中包含M個窄帶頻譜成分,中心頻率為fm,m=1,2,…,M。與并聯(lián)結構FxLMS 算法一樣,控制系統(tǒng)中共有M個前饋并聯(lián)通道,設有M個獨立的并聯(lián)自適應濾波器。另外,增設一條反饋通道以提升算法魯棒性能。在前饋通道中,通過帶通濾波器Bm的設置,參考信號x(t)被拆分成與擾動信號頻譜相同的多個窄帶信號xm(t)
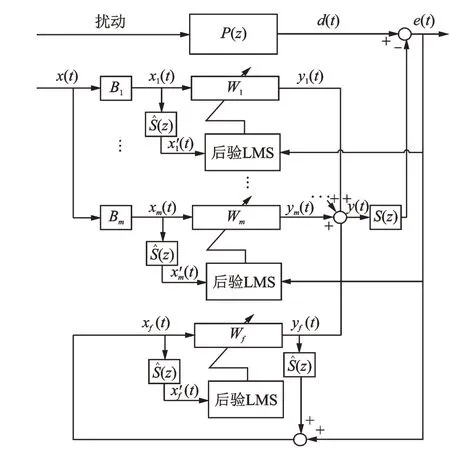
圖2 混合自適應振動主動控制方法的系統(tǒng)框圖Fig.2 The structure of hybrid-adaptive algorithm in AVC application

并聯(lián)自適應濾波器Wm通過后驗LMS 算法調節(jié)收斂并輸出該并聯(lián)通道的控制信號ym(t)

在反饋通道中,參考信號xf(t)通過次級通道的估計與誤差信號計算得到

反饋自適應濾波器Wf通過后驗LMS 算法調節(jié)收斂并輸出該通道的控制信號yf(t)

y(t)為控制器的控制輸出響應,由前饋通道的輸出響應ym(t)及反饋通道的輸出響應yf(t)得到

該混合自適應振動主動控制算法如式(11)~(16)所示
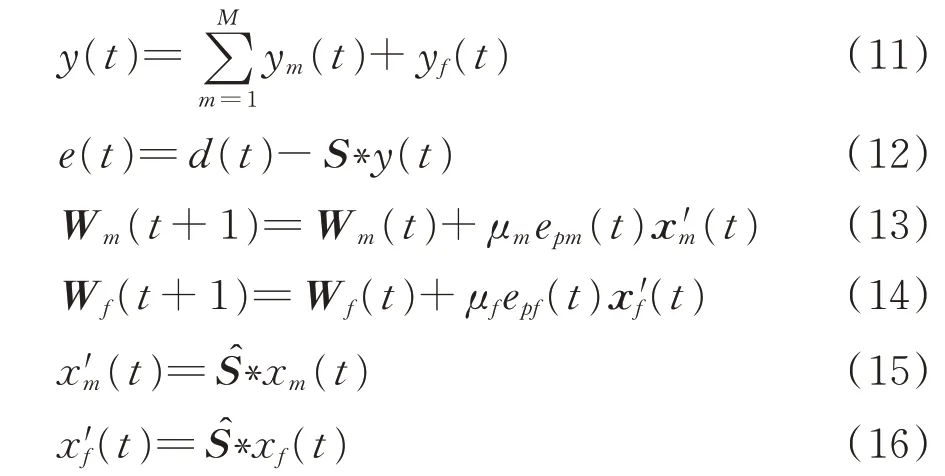
其中:后驗誤差epm(t)和epf(t)通過式(17)和(18)求得。
2 穩(wěn)定性及收斂性分析
2.1 在確定環(huán)境下的穩(wěn)定性分析
混合自適應振動主動控制算法中的自適應濾波器為有限脈沖響應(finite impulse response,簡稱FIR)形式,可將其表示為無限脈沖響應(infinite impulse response,簡稱IIR)形式

混合自適應算法的第m個前饋通道的自適應過程可以表示為式(20)~(22)所示
反饋通道中的自適應過程可表示為式(23)~(25)所示
在忽略傳感器的測量噪聲對系統(tǒng)造成影響的確定環(huán)境下,引入預濾波器第m個前饋通道后驗誤差可表示為



根據文獻[24]可知,筆者混合自適應控制算法的穩(wěn)定條件為式(30)和(31)是正實傳遞函數。
2.2 在隨機環(huán)境中的收斂性分析
對于測量噪聲不能被忽略的隨機環(huán)境,使用ω(t+1)表示測量噪聲。前饋通道和反饋通道的后驗誤差分別為
假設

收斂域DCm和DCf為
如果Hm(z?1)和Hf(z?1)是嚴格正實的,則


可見,在隨機環(huán)境下的混合自適應算法收斂條件為Hm(z?1)和Hf(z?1),為嚴格正實傳遞函數。與確定環(huán)境下類似,一個較好的次級通道辨識結果可以放松整個混合自適應控制系統(tǒng)的收斂條件。如果次級通道的辨識結果足夠好,即使在有較高測量噪聲的環(huán)境中,提出的混合自適應控制算法也是收斂的。
3 收斂性仿真及分析
結合Adams 軟件強大的動力學分析功能和Simulink 圖形化編程及在控制方法仿真中的優(yōu)勢,筆者通過聯(lián)合仿真技術研究了混合自適應控制方法在結構微振動控制中的收斂性能。如圖3 所示,Adams 和Simulink 聯(lián)合仿真系統(tǒng)主要包括2 部分:Adams 軟件中建立的微振動主動控制實驗平臺動力學虛擬機和Simulink 軟件中設計的混合自適應振動控制器。通過Adams 軟件導出相應的接口量與Simulink 互聯(lián),即可完成結構微振動主動控制聯(lián)合仿真系統(tǒng)的建立。
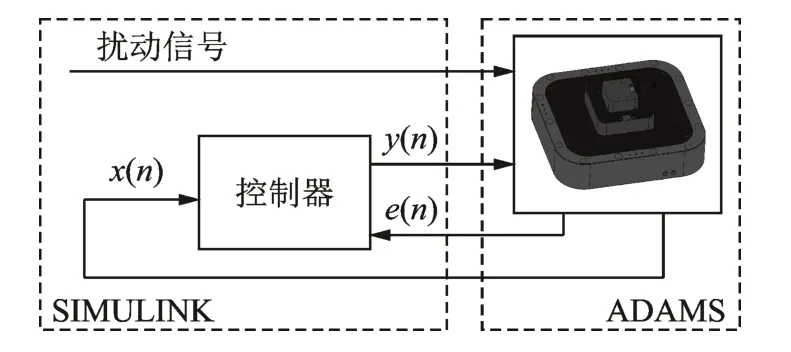
圖3 Adams 和Simulink 聯(lián)合仿真系統(tǒng)Fig.3 Co-simulation structure of Adams and Simulink
為了實現(xiàn)結構微振動主動控制仿真,如圖4 所示,設計了微振動主動控制平臺虛擬機,主要包括基座、起振平臺、抑振平臺和載物臺。基座用于承載和固定整個微振動主動控制平臺;起振平臺用于模擬外部擾動所引起的微振動;抑振平臺通過控制算法輸出作動來抑制微振動。控制目標是抑制載物臺的微振動。通過壓電堆與柔性鉸鏈的裝配連接,起振平臺和抑振平臺可以實現(xiàn)在相互垂直的x,y,z3 個方向上的微振動。Adams 軟件中采集載物臺上表面中心點的位移變化作為算法的誤差信號,采集起振平臺上的任一點位移振動作為算法的參考信號。通過生成的被控模塊輸出接口到Simulink 中的控制器,經過控制器運算,將控制信號輸出到抑振平臺的壓電堆作動器。
在聯(lián)合仿真中,針對4 個目標干擾源頻譜,對比驗證前饋并聯(lián)結構FxLMS 算法及混合自適應控制算法在不同帶通濾波器數量下的振動抑制效果。添加10 Hz 的正弦疊加作為干擾信號,再添加3 個高階諧波成分,分別為20,25 和30 Hz。20 Hz 正弦信號的幅值取10 Hz 正弦信號幅值的30%,25 Hz 和30 Hz 正弦信號的幅值取20 Hz 正弦的30%。所有自適應濾波器的階數設為相同,自適應濾波器系數初始值都設為0。仿真分析過程中將FxLMS 算法、并聯(lián)結構FxLMS 算法以及混合自適應算法的抑振效果進行對比。對于并聯(lián)結構FxLMS 算法與混合自適應算法,對比其在不同前饋自適應濾波器個數的振動控制效果,用M表示前饋自適應濾波器的個數。M=1 表示僅設置10 Hz 的參考信號帶通濾波器,M=2 表示同時設置10 Hz 和20 Hz 的參考信號帶通濾波器,以此類推。取振動幅值衰減90%所需的控制時間作為評價算法收斂速度的指標。將仿真時間最后5 s 時的抑振效果作為穩(wěn)態(tài)評價指標。抑振效率的計算式為
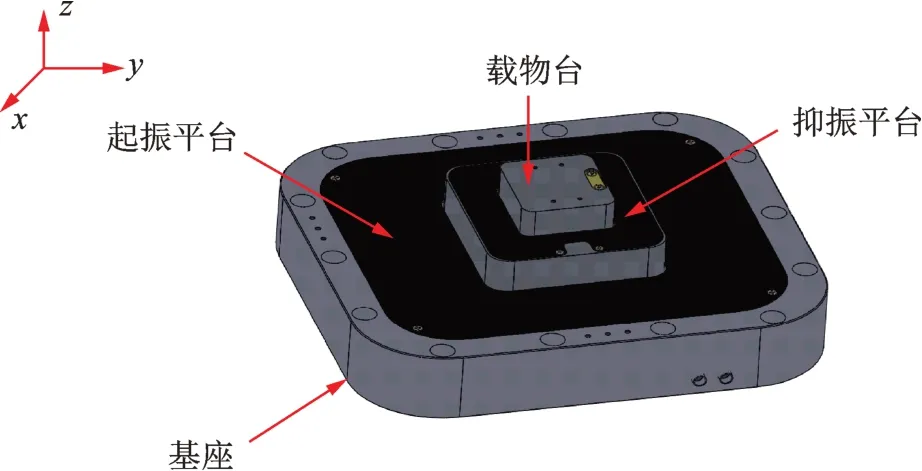
圖4 微振動主動控制平臺虛擬機Fig.4 Virtual machine of the micro vibration active control platform

其中:d(i)為振動主動控制前的殘差;e(i)為振動主動控制后的殘差;SA的單位為dB。
SA為負值,意味著振動得到抑制,反之則為振動增強;SA越小,說明抑振效果越好。FxLMS 算法、并聯(lián)結構FxLMS 算法以及混合自適應算法在不同帶通濾波器個數下的振動抑制仿真結果如表1所示。
表1 中,在收斂速度方面,混合自適應算法具有明顯優(yōu)勢,而FxLMS 算法對于多頻擾動的抑制速度并不是很出色,需要43.98 s 才能達到振幅衰減90%的水平。并聯(lián)結構的FxLMS 算法隨著其并聯(lián)通道中自適應濾波器的個數增多,算法收斂速度增快。當其并聯(lián)自適應濾波器個數與擾動信號頻譜數相同時(M=4),需要11.39 s 達到收斂水平。當其自適應濾波器個數有3 個時,則需要26.18 s 達到收斂水平。當濾波器個數僅有1 個和2 個的情況下,算法始終不能夠抑制掉帶通濾波器頻譜以外的擾動所引起的振動。

表1 振動抑制仿真結果Tab.1 Simulation results of vibration suppression
從各算法的抑振效率看,傳統(tǒng)FxLMS 算法對于多個窄帶頻譜擾動引起的振動抑制效率為?45.96 dB。并聯(lián)結構FxLMS 算法只有在并聯(lián)通道個數與窄帶擾動的頻譜個數相同時(M=4),抑振效率優(yōu)于FxLMS 算法,達到?76.61 dB。當自適應濾波器個數少于窄帶擾動頻譜個數時,相比于FxLMS 算法,其抑振效率并不令人滿意。筆者所提出的混合自適應算法在仿真中的抑振效率隨著前饋自適應濾波器的個數增加,抑振效率逐漸提升。由于反饋通道控制器的存在,當前饋自適應濾波器個數等于1 時(M=1),抑振效率達到?79.99 dB,優(yōu)于并聯(lián)FxLMS 算法在自適應濾波器個數與窄帶擾動頻譜數相同(M=4)時的效果。對于M=2,M=3 和M=4 的情況下,抑振效率的提升并不是很明顯,但也均達到?82 dB。
4 實驗分析與驗證
4.1 實驗平臺搭建
為了進一步對比驗證結構振動主動控制算法的抑振效果,筆者設計制作了一種三自由度微振動主動隔振結構如圖5 所示,主要包括基座、起振模塊、抑振模塊和載物臺。該結構以壓電堆為作動器,通過多個壓電堆及柔性鉸鏈的組合連接,完成在兩兩垂直的x,y,z3 個方向的微振動環(huán)境模擬及微振動主動控制。基座主要用來承載和固定整個隔振結構;起振模塊用于模擬外擾引起的結構微振動響應;抑振模塊可以通過主動振動控制抑制起振模塊所引起的微振動。抑振模塊與載物臺固定連接,載物臺的振動響應通過電容位移傳感器測量得到。
在此基礎上,基于高性能計算機、D/A 和A/D板卡、信號調理器和功率放大器等相關測控儀器,以及Matlab/Simulink 軟件開發(fā)環(huán)境,構建了三自由度微振動主動隔振實驗系統(tǒng)結構圖,如圖6 所示。
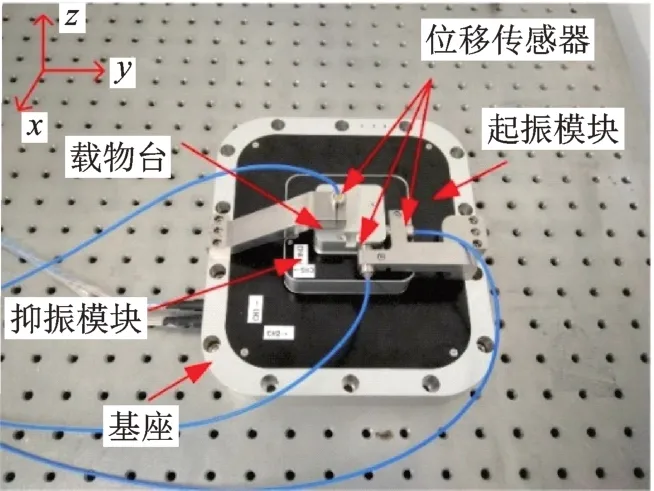
圖5 三自由度微振動主動隔振結構Fig.5 Picture of the 3 DOF active micro-vibration control unit
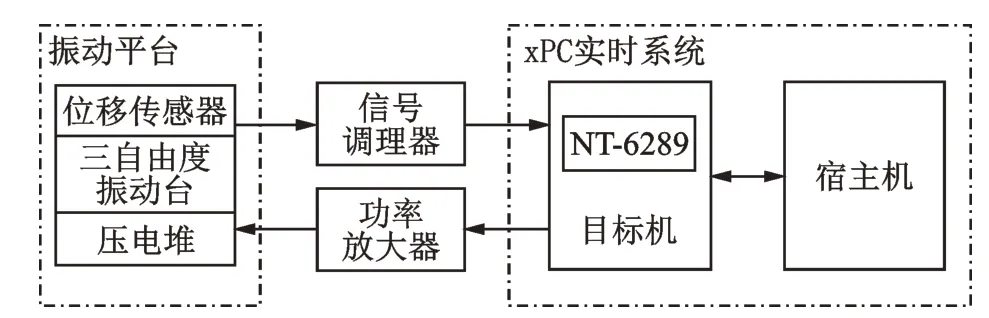
圖6 三自由度微振動主動隔振實驗系統(tǒng)結構圖Fig.6 Block diagram of the 3 DOF active micro-vibration control system
基于Matlab/Simulink 工具箱,兩臺高性能計算機通過交叉網線連接,構建了xPC 實時測控系統(tǒng),一臺作為目標機,另一臺作為宿主機。將2 張NI-6289 數據采集板卡插入目標機的PCI 插槽,作為本實驗系統(tǒng)的A/D 輸入和D/A 輸出板卡。實驗前,在宿主機上編寫Simulink 控制程序,并生成C 代碼下載到目標機中。實驗過程中,目標機作為獨立的實時控制器,首先輸出0~10 V 的擾動信號給功率放大器(E00.D6,XMT?),放大至0~150 V,驅動起振模塊模擬外擾產生微振動響應。位移傳感器(E509.C1,XMT?)采集載物臺的振動信號,經過信號調理器(E09.C1,XMT?)調理之后成為0~10V 的電壓信號,進入目標機進行實時處理。通過目標機中控制器的控制算法運算,輸出0~10 V 的控制信號,經過功率放大器放大之后驅動抑振模塊作動,對載物臺的微振動進行抑制。三自由度的微振動主動隔振實驗系統(tǒng)實物圖如圖7 所示。在本微振動主動控制實驗中,主要考慮雙頻擾動下的單輸入單輸出的微振動控制。由于實際環(huán)境中的外擾比較復雜,所以在SISO 微振動主動控制中分別選取幾種典型的復雜擾動信號作為微振動擾動激勵源,驗證所提出的混合自適應振動主動控制算法在不同擾動環(huán)境下的抑振性能。

圖7 三自由度的微振動主動隔振實驗系統(tǒng)實物圖Fig.7 Experimental setup of the 3 DOF active micro-vibration control system
4.2 雙頻微振動主動抑制實驗
在雙頻微振動主動控制實驗中,針對實際環(huán)境中擾動信號的復雜性,選取雙頻激勵、頻率突變、幅值突變和噪聲添加4 種典型擾動激勵進行實驗驗證,對比并聯(lián)結構FxLMS 控制算法和混合自適應控制算法的抑振效果。
4.2.1 雙頻激勵
采用頻率分別為10 Hz 和25 Hz 的2 個正弦信號的疊加作為振動激勵信號。2 個帶通濾波器的中心頻率與擾動信號的頻譜一致,為10 Hz 和25 Hz。前饋并聯(lián)FxLMS 算法與混合自適應算法中的自適應濾波器采用相同階數FIR 形式濾波器,初始值為0。雙頻正弦外擾激勵下微振動主動控制時域效果和實驗結果如圖8,9 所示。實驗過程中,并聯(lián)Fx-LMS 算法在實驗時間55 s 前能夠快速抑制振動幅值,抑振效率最高達到?87 dB;但是隨后穩(wěn)態(tài)性能有所反彈,直至控制時間100 s 時,其抑振效率為?66 dB。相比之下,混合自適應算法的穩(wěn)態(tài)抑振效率達?86 dB。另外,在并聯(lián)FxLMS 算法控制下,系統(tǒng)的穩(wěn)態(tài)位置較原來中心位置偏移了1 μm 左右。這是由于前饋通道參考信號傳感器引起的,混合自適應控制算法由于反饋通道的存在,穩(wěn)態(tài)位置仍在中心位置,獲得更好的控制效果。
4.2.2 頻率突變
實驗開始時,采用10 Hz 和25 Hz 的2 個正弦信號疊加作為振動激勵信號,施加控制信號直到振動衰減穩(wěn)定。在實驗時間80 s 時,擾動激勵信號的頻率突變?yōu)?1 Hz 和26 Hz。頻率突變外擾激勵下微振動主動控制時域效果和實驗結果如圖10,11 所示。實驗時間前80 s,控制效果與雙頻激勵下一致。在80 s 時擾動信號的頻率突然發(fā)生變化,并聯(lián)Fx-LMS 算法瞬間失效,無法有效抑制結構振動。混合自適應算法在擾動信號頻率突變的情況下抑振效率升至?21 dB,隨后仍能夠抑制振動,逐漸收斂至?46 dB。從圖10 中可以看出,并聯(lián)FxLMS 算法在擾動頻率突變后抑振失效,而混合自適應算法仍然具有較好的抑振效果。
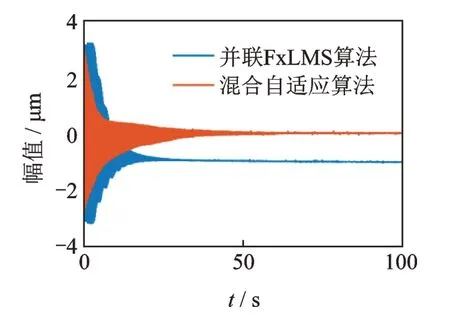
圖8 雙頻正弦外擾激勵下微振動主動控制時域效果Fig.8 Control effects under double-frequency excitation in time domain
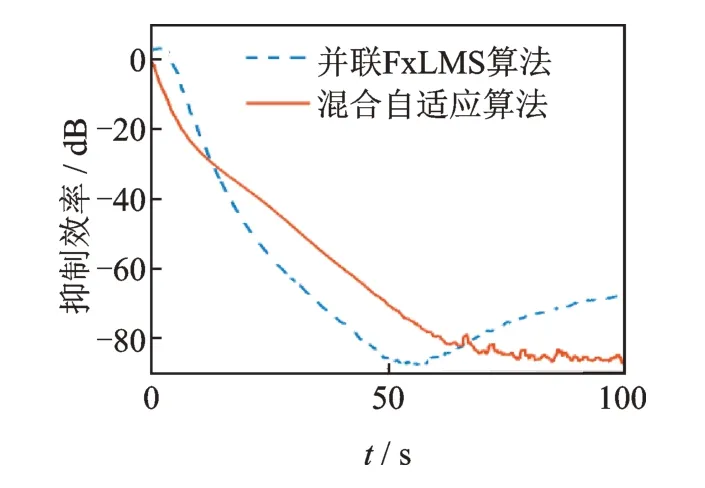
圖9 雙頻正弦外擾激勵下微振動主動控制實驗結果Fig.9 Control effects under double-frequency excitation
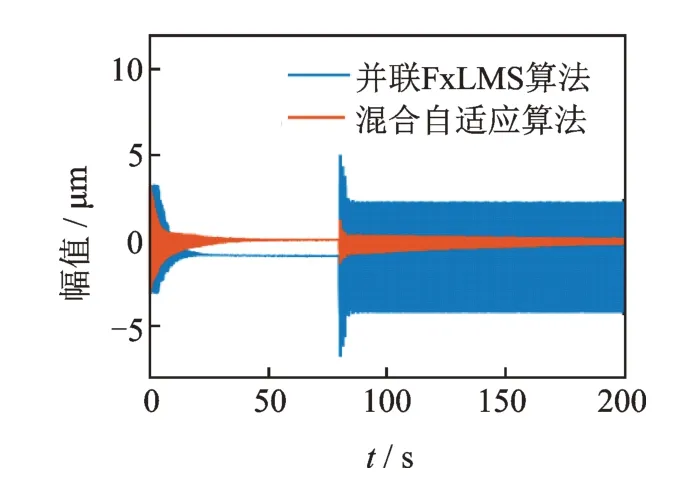
圖10 頻率突變外擾激勵下微振動主動控制時域效果Fig.10 Control effects under mutation-frequency excitation in time domain
4.2.3 幅值突變
實驗開始時采用10 Hz 和25 Hz 的2 個正弦信號疊加作為振動激勵信號,施加控制信號直到振動衰減穩(wěn)定。在實驗時間為80 s 時,擾動信號的幅值突變?yōu)樵姓倚盘柗档?25%,幅值突變外擾激勵下微振動主動控制時域效果和實驗結果如圖12,13 所示。并聯(lián)FxLMS 算法與混合自適應控制算法在擾動信號的幅值發(fā)生突變后,抑振效率發(fā)生抖動,隨后都能快速收斂至原有抑振水平。混合自適應算法在擾動幅值時所引起的振動幅值仍然較并聯(lián)FxLMS 算法有優(yōu)勢。
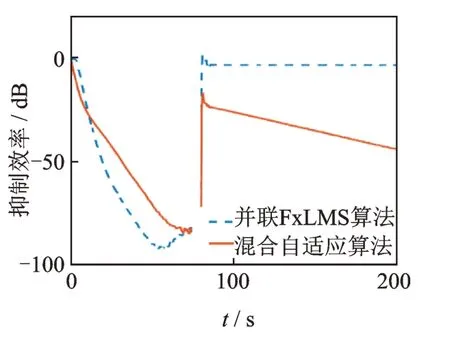
圖11 頻率突變外擾激勵下微振動主動控制實驗結果Fig.11 Control effects under mutation-frequency excitation
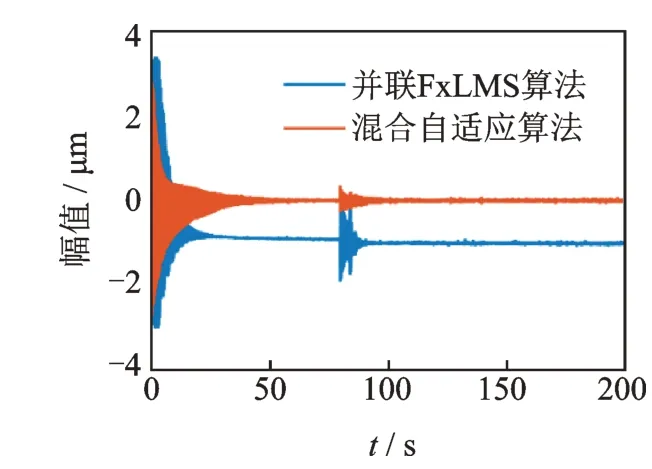
圖12 幅值突變外擾激勵下微振動主動控制時域效果Fig.12 Control effects under mutation-magnitude excitation in time domain
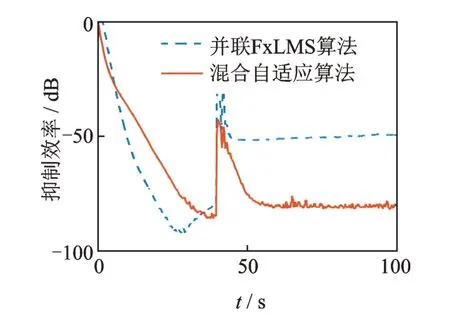
圖13 幅值突變外擾激勵下微振動主動控制實驗結果Fig.13 Control effects under mutation-magnitude excitation
4.2.4 噪聲添加
為了對比上述振動主動控制算法對于寬頻噪聲擾動的魯棒性,將寬頻白噪聲疊加在雙頻擾動信號中,對比各主動振動控制算法的抑振效果。在實驗時間為80 s 時,疊加寬頻白噪聲至雙頻正弦擾動激勵信號。添加噪聲外擾激勵下微振動主動控制時域效果和實驗結果如圖14,15 所示。突然疊加白噪聲干擾后,并聯(lián)FxLMS 算法與混合自適應控制算法的抑振效率都有影響,但是混合自適應控制算法仍能收斂至?52 dB 的抑振水平,明顯優(yōu)于并聯(lián)Fx-LMS 算法的?38 dB。
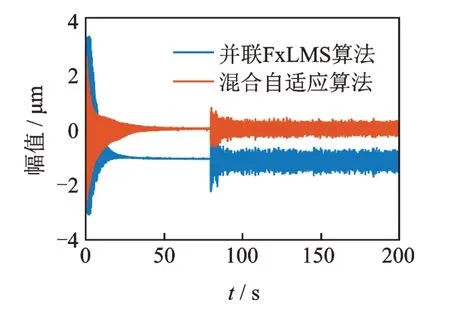
圖14 添加噪聲外擾激勵下微振動主動控制時域效果Fig.14 Control effects under double frequency with wideband noise excitation in time domain
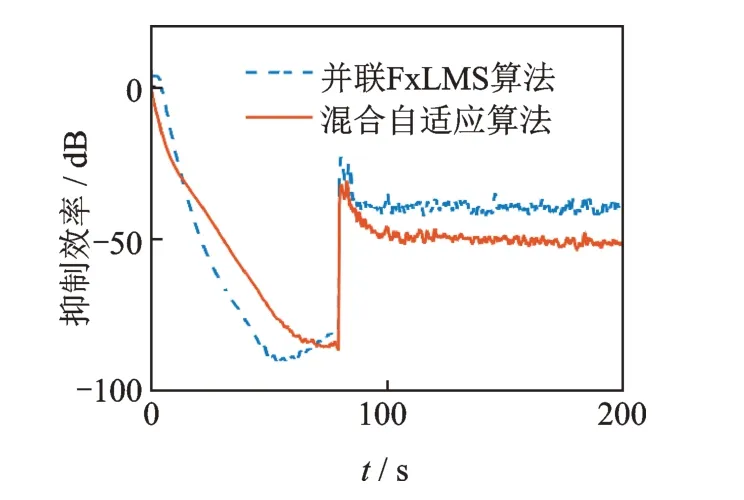
圖15 添加噪聲外擾激勵下微振動主動控制實驗結果Fig.15 Control effects under double frequency with wideband noise excitation
通過上述4 種典型擾動激勵下的微振動主動控制實驗,對比了并聯(lián)FxLMS 算法與混合自適應控制算法的抑振效果,可以發(fā)現(xiàn)。
1)在雙頻窄帶擾動下,如果并聯(lián)FxLMS 算法的參考信號帶通濾波器的中心頻率與擾動信號頻譜一致,可獲得較快地抑振速度和較好的抑振效果。混合自適應算法在雙頻激勵下也能取得較好的抑振效率。即使在振動控制過程中,窄帶擾動信號的振動幅值發(fā)生突變,并聯(lián)FxLMS 算法和混合自適應振動控制算法仍然具有較好的適應性,能夠迅速收斂。
2)如果雙頻窄帶擾動信號的頻率發(fā)生漂移或者突變導致擾動信號頻率失配,則會影響并聯(lián)Fx-LMS 算法的抑振效果,甚至可能導致控制器失效發(fā)散。混合自適應控制算法因為反饋通道的存在能夠克服并聯(lián)FxLMS 算法的不足,在擾動信號頻譜突變或者漂移的情況下,仍然能夠抑制擾動信號所引起的振動幅值,保持較好的穩(wěn)態(tài)收斂水平。
3)擾動信號中疊加有寬頻白噪聲,會影響并聯(lián)FxLMS 算法和混合自適應振動控制算法的控制效果,但是混合自適應振動主動控制算法相較于并聯(lián)FxLMS 算法具有較好的魯棒性能,仍能取得較好穩(wěn)態(tài)性能。
5 結束語
以多頻線譜擾動源的結構微振動主動抑制為目標,在并聯(lián)FxLMS 振動主動控制算法的基礎上,提出一種混合自適應振動主動控制算法。基于聯(lián)合仿真及振動控制實驗,對比分析了相關振動控制算法的抑振效果。結果表明,筆者提出的混合自適應振動主動控制算法相較于并聯(lián)FxLMS 算法具有更好的抑振表現(xiàn),特別是針對擾動頻率失配及寬頻噪聲的情況,算法魯棒性得到加強。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中國生殖健康(2019年3期)2019-02-01 06:12:26
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00