矢量圖解法在消除轉子慣性力影響機械平衡中的應用
2021-03-03 03:40:10余敏
中國設備工程 2021年4期
關鍵詞:質量
余敏
(海軍士官學校,安徽 蚌埠 233012)
轉子在運轉過程中,由于其質量分布的不均勻而產生的與ω2成正比的離心慣性力,會對運動副產生附加動載荷,從而引起一系列不良后果:(1)增加運動副的摩擦和構件的內應力,降低機械效率和使用壽命;(2)呈周期性變化的慣性力(大小和方向),將引起機械及其基礎設施產生強迫振動,使機械的工作精度和可靠性下降,同時,會引起零件內部材料的疲勞損壞,產生噪聲;(3)當轉子轉速等于或接近其臨界轉速時,機械產生共振,不僅影響機械本身,還會使附近工作的機械以及基礎設施受到影響乃至破壞,甚至危及周圍人員和廠房建筑的安全。因此,在機械中,尤其對轉速較高的轉子,必須將這類離心慣性力予以平衡,以減小或消除由此產生的不良影響。
1 轉子慣性力及其特點
1.1 轉子
機械在運動過程中,除機架以外的其他構件都要運動。這些運動構件的運動方式有三種:繞定軸轉動、往復移動和做平面復合運動。在機械中,將繞固定軸線轉動的構件稱為轉子,根據轉子在運轉過程中軸線是否產生彈性變形,可以將轉子分為剛性轉子和撓性轉子兩類。
(1)剛性轉子。轉子固有頻率較大、剛性較好、工作轉速v<0.7ve1(第一臨界轉速)、運轉中轉子軸線變形小。
(2)撓性轉子。轉子質量大、跨度大、徑向尺寸較小、工作轉速v≥0.7ve1,運轉中轉子軸線產生明顯變形。
1.2 轉子慣性力
當轉子質量分布不均勻,或由于制造誤差而造成質心與回轉軸線不重合時,在轉動過程中,將會產生離心慣性力。如圖1所示,偏心轉子P(m,r)產生的離心慣性力大小為F=mrω2,其中ω為轉子角速度。
1.3 轉子慣性力的特點
由F=mrω2可 知,ω↑→F↑。 在 圖1中, 若 轉 子P(G=10N),r=1mm,ω=100πrad/s,則產生慣性力F=ma=Grω2/g=10×10-3×104π2/g≈100N。顯而易見:產生的慣性力是其自重的10倍,即此時轉子支承處的動反力是靜止狀態時的10倍;而若將其轉速增加1倍,則動反力將增大到原來的4倍,是其自身重力的40倍。因此,在機械中,尤其對轉速較高的轉子,必須將這類離心慣性力予以平衡,這就是轉子的平衡問題。
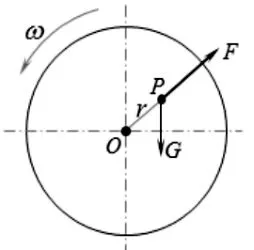
圖1
2 轉子平衡的原理
為了完全或部分地消除慣性力對機械的不良影響,就必須研究慣性力的變化規律,設法將構件的不平衡慣性力消除或減小,這就是轉子平衡的目的。轉子平衡分為剛性轉子的平衡和撓性轉子的平衡,其中,撓性轉子,其轉速增大→變形增大→離心慣性力增大→解決平衡問題難度增大,撓性轉子的平衡屬于專門學科研究的問題,本文不涉及。本文主要研究剛性轉子的平衡。
2.1 剛性轉子平衡的類型
(1)轉子靜平衡。在一般機械中,當轉子的厚徑比L/D≤0.2時,可以將其視為圓盤狀,如圖2(a)所示。對這類軸向尺寸不大的轉子,可近似地認為其不平衡質量分布在同一回轉平面內。當轉速較低時,各偏心質量mk所產生的慣性力形成的是平面匯交力系,但合力,使得轉子處于不平衡狀態。這種不平衡現象在轉子靜態時即可表現出來,故稱為靜不平衡。對此可采取平衡掉各偏心質量產生的慣性力的措施來達到平衡,這種平衡稱為轉子的靜平衡。
(2)轉子動平衡。對于厚徑比L/D>0.2的轉子(圖2(b)所示),由于其軸向尺寸較大,其質量沿軸線分布在若干個互相平行的回轉平面內。當轉子轉速較高時,即使轉子的質心S在回轉軸線上,但各偏心質量所產生的慣性力不在同一回轉平面內,以致形成慣性力矩,使得轉子處于不平衡狀態。這種不平衡,在轉子轉動情況下才能顯示出來,故稱為動不平衡。對此,可以采取同時平衡掉各偏心質量產生的慣性力和慣性力矩的措施來達到平衡,這種平衡稱為轉子的動平衡。
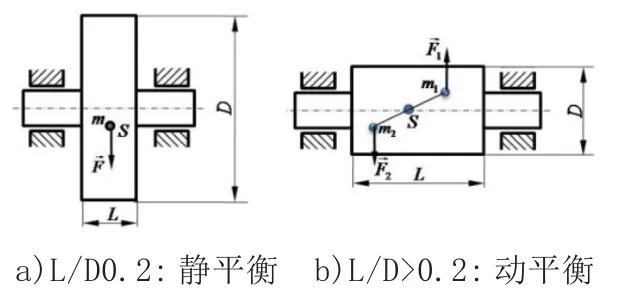
圖2 剛性轉子平衡的類型
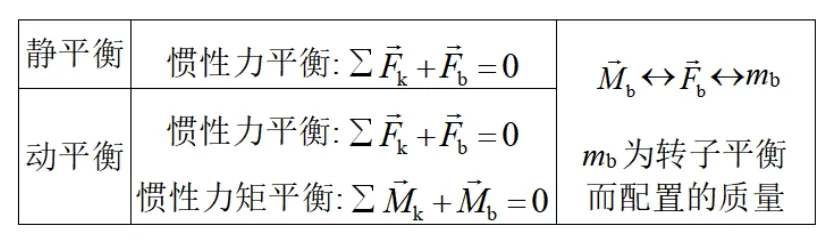
表1
2.2 剛性轉子平衡的原理
轉子平衡是指繞固定軸線回轉構件的慣性力和慣性力矩均平衡。通常采用配置質量mb的方法來平衡轉子產生的慣性力和慣性力矩,其平衡原理是基于理論力學中的力系平衡理論。由于動平衡同時滿足靜平衡的條件,所以,達到動平衡的轉子一定是靜平衡的,而達到靜平衡的轉子不一定是動平衡的。
3 矢量圖解法在消除轉子慣性力影響機械平衡中的應用
3.1 矢量圖解法
利用矢量圖來分析或解決某個物理量的大小、方向及變化趨勢的一種解題方法,稱為矢量圖解法。矢量圖解法具有直觀形象、簡單明了等優點。其步驟是:(1)選定適當的比例尺,用帶箭頭的線段代表矢量的大小和方向;(2)按矢量平行四邊形或多邊形法則對矢量進行加法或減法;(3)依據選定的比例尺,從矢量多邊形圖中直接量出未知矢量的大小,同時獲得方向。
3.2 矢量圖解法在實現剛性轉子靜平衡中的應用
3.3 矢量圖解法在實現剛性轉子動平衡中的應用
對于厚徑比L/D>0.2的轉子,由于其軸向尺寸較大,其質量沿軸線分布在若干個互相平行的回轉平面內,各偏心質量所產生的慣性力不在同一回轉平面內,形成的是一個不匯交空間力系,同時,產生慣性力矩,此時,不平衡既有,又有。從理論上講,可以對每個回轉平面配置平衡質量,但實際情況是:①實際結構不允許在偏心質量所在回轉平面內加減平衡配重;②由于轉子的軸向尺寸較大,僅靠在某一回轉平面內加減平衡配重,即使達到了慣性力平衡,但還存在慣性力矩的不平衡。
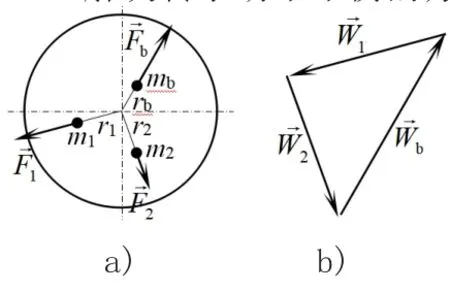
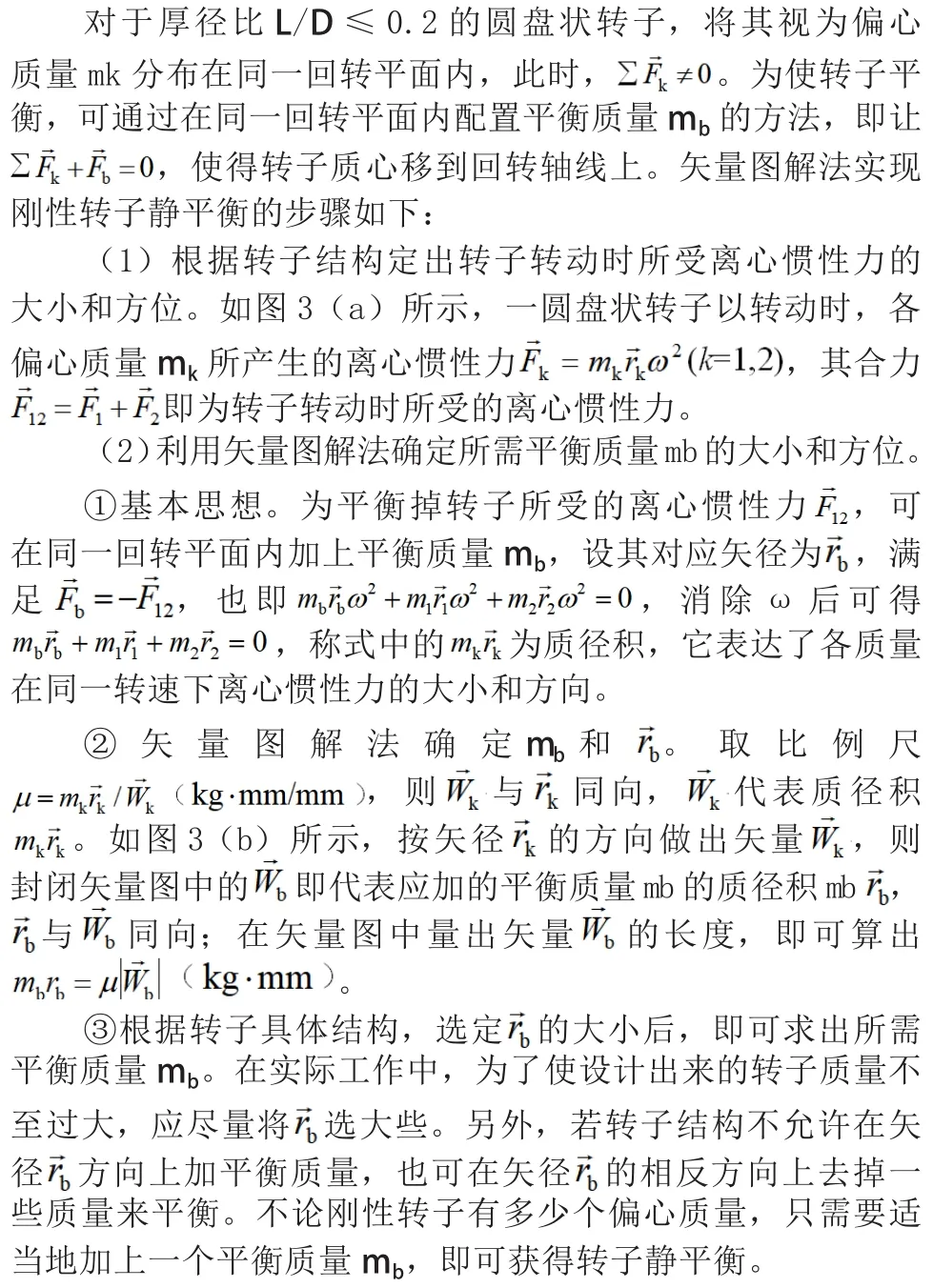
圖3 轉子靜平衡矢量圖解法
解決轉子動不平衡的辦法就是運用理論力學的空間力系平衡理論:在轉子的適當位置選取垂直于軸線的互相平行的兩個平衡基面(又稱校正面),將各不平衡質量所產生的慣性力分解到校正面上(等效替代),則將原不匯交的空間力系轉化為平面匯交力系,從而將問題轉化為不平衡質量分布在同一回轉平面內的轉子靜平衡問題。矢量圖解法實現剛性轉子動平衡的步驟如下:
(1)選擇基面,分解慣性力。如圖4所示,設有3個在不同回轉平面內的偏心質量m1、m2和m3。現選取兩個互相平行的平衡基面I面和II面,將mk產生的慣性力分解到I面()和II面()。于是,3個偏心質量所產生的慣性力可以用集中在兩個平衡基面內的各個慣性力分量代替,且代替前后由它們引起的不平衡完全相同。根據理論力學公式,有
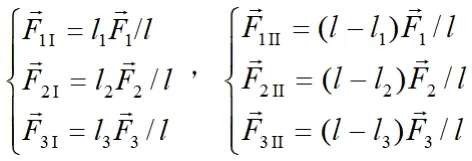
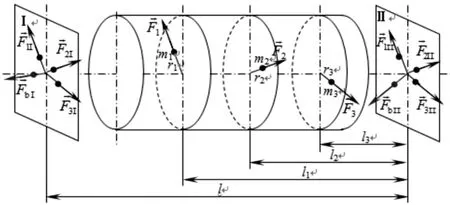
圖4 轉子動平衡矢量圖解法
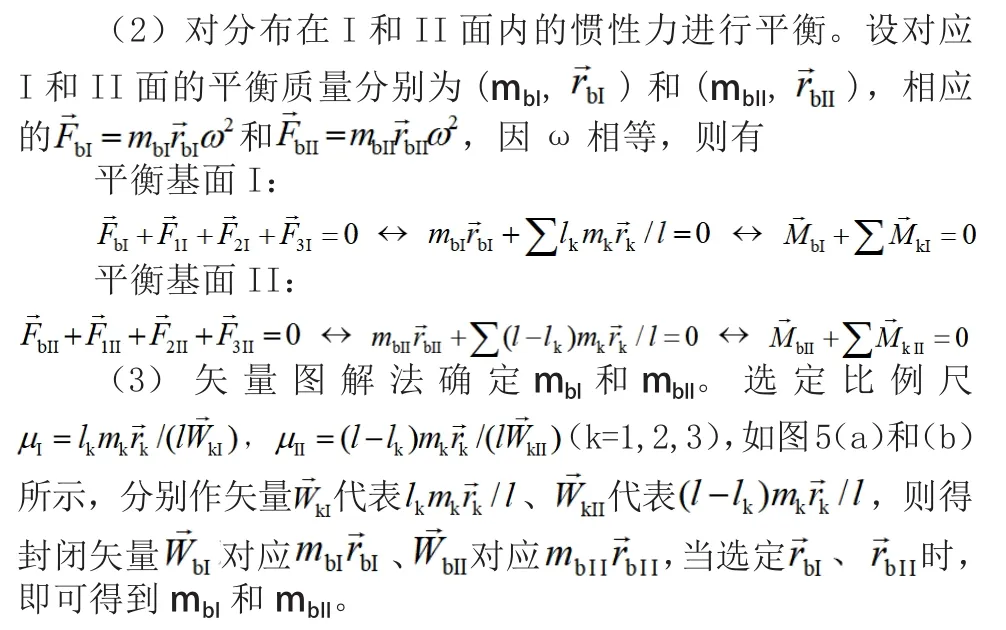
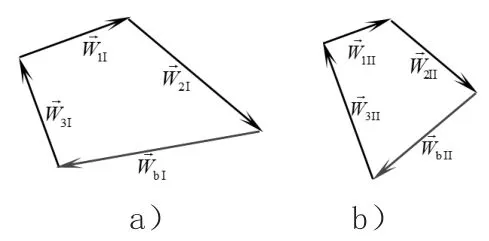
圖5 轉子動平衡矢量圖解
綜上所述,對于任何動不平衡的剛性轉子,無論其不平衡質量分布在多少個不同的平面內,均可將其分解到任選的兩個垂直于軸線的平面I和II內,且只需在I和II面內各自配置平衡質量,即可使該轉子達到完全平衡。因為動平衡需要選定兩個平衡基面,故稱為雙面平衡;而靜平衡只需要在一個平面內配置平衡質量即可,故靜平衡又稱為單面平衡。平衡基面可以根據回轉件的具體結構選定,通常選擇回轉件的兩個端面。
猜你喜歡
中學生數理化·中考版(2022年10期)2022-11-10 09:37:42
中學生數理化·八年級物理人教版(2022年12期)2022-02-14 07:08:42
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
中國生殖健康(2019年2期)2019-08-23 08:12:08
石油化工建設(2018年6期)2018-04-22 03:16:54
產品可靠性報告(2017年7期)2017-09-05 09:49:12
中學生數理化·八年級物理人教版(2017年12期)2017-04-18 12:59:38
汽車觀察(2016年3期)2016-02-28 13:16:26
民生周刊(2014年7期)2014-03-28 01:30:54
