自主列車運(yùn)行系統(tǒng)分析
2021-02-28 06:49:30上海工程技術(shù)大學(xué)城市軌道交通學(xué)院徐紀(jì)康
電子世界 2021年22期
上海工程技術(shù)大學(xué)城市軌道交通學(xué)院 徐紀(jì)康
卡斯柯信號(hào)有限公司 潘 亮 朱孟雯
1 背景
CBTC和無(wú)人駕駛技術(shù)已經(jīng)相當(dāng)成熟并被廣泛使用在全國(guó)各地的城市軌道交通中。但是,當(dāng)突發(fā)特殊情況(車地通信故障、區(qū)間/車站火災(zāi)等)時(shí),需要依靠調(diào)度或者司機(jī)人工來(lái)處置并恢復(fù)到正常運(yùn)行中。同時(shí),為了保證在信號(hào)系統(tǒng)降級(jí)情況下的安全運(yùn)行,需要采用次級(jí)檢測(cè)設(shè)備來(lái)保證列車的粗略定位。所以,如何在故障情況下,減少人工干預(yù)和處置故障的時(shí)間,又能保證安全。同時(shí),減少對(duì)于次級(jí)檢測(cè)設(shè)備(主要是計(jì)軸或者軌道電路設(shè)備)的依賴,是需要解決的關(guān)鍵問(wèn)題。
在航空航天領(lǐng)域,衛(wèi)星系統(tǒng)完全靠“自主運(yùn)行”來(lái)保證自身安全和各種任務(wù)的完成。后來(lái),自主運(yùn)行的概念應(yīng)用到汽車自動(dòng)駕駛領(lǐng)域。美國(guó)機(jī)動(dòng)車工程師學(xué)會(huì)(SAE)定義了L0到L5的自動(dòng)駕駛等級(jí)。汽車自動(dòng)駕駛主要依靠信息通信技術(shù)、人工智能技術(shù)以及網(wǎng)絡(luò)技術(shù)實(shí)現(xiàn)自動(dòng)駕駛功能。
在軌道交通領(lǐng)域,列車在非完全封閉環(huán)境下的安全高效運(yùn)行是基本問(wèn)題。因此,本文主要根據(jù)現(xiàn)有CBTC和無(wú)人駕駛技術(shù)的特點(diǎn)和安全運(yùn)行需求,結(jié)合航空航天相關(guān)技術(shù)和國(guó)內(nèi)外相關(guān)文獻(xiàn),分析自主列車運(yùn)行系統(tǒng)(TACS)的特點(diǎn)、功能以及部分典型場(chǎng)景。
2 系統(tǒng)特征和功能分析
TACS系統(tǒng)不是指無(wú)人駕駛信號(hào)系統(tǒng)(UTO),而是指列車能夠在動(dòng)態(tài)變化環(huán)境下(比如,雨雪天氣突發(fā)情況下,列車前方火災(zāi)等情況下),列車自主感知周圍情況,自主決定前方的運(yùn)行策略,而不需要等待調(diào)度中心下發(fā)命令。因此,自主列車系統(tǒng)可以在非結(jié)構(gòu)化和動(dòng)態(tài)的開放環(huán)境中安全運(yùn)行。
為了實(shí)現(xiàn)自主列車運(yùn)行的目標(biāo),根據(jù)國(guó)外相關(guān)文獻(xiàn),定義了自主列車運(yùn)行控制等級(jí)(LOAn)。TACS系統(tǒng)分為L(zhǎng)OA1,LOA2,LOA3,LOA4四個(gè)等級(jí)。
自主列車運(yùn)行系統(tǒng)逐級(jí)發(fā)展和實(shí)現(xiàn),最終實(shí)現(xiàn)列車依賴于對(duì)周圍環(huán)境的感知,自主決策,自主安全運(yùn)行,達(dá)到無(wú)人調(diào)度的目標(biāo)。但是,實(shí)現(xiàn)LOA4的目標(biāo),需要分步實(shí)現(xiàn),如表1所示,不同的LOA等級(jí)代表不同的自主列車運(yùn)行等級(jí)。

表1 自主列車運(yùn)行等級(jí)功能研究
自主列車系統(tǒng)配合傳統(tǒng)的CBTC系統(tǒng),采用分級(jí)方式,最終使整個(gè)信號(hào)系統(tǒng)達(dá)到LOA4。實(shí)現(xiàn)整個(gè)地鐵大系統(tǒng)的智慧運(yùn)行。
3 系統(tǒng)關(guān)鍵技術(shù)研究
基于TACS的特征和功能分析,需要依賴于以下關(guān)鍵技術(shù)的成熟和實(shí)現(xiàn):
(1)多傳感器融合技術(shù);
(2)人工智能技術(shù)(AI)。
本文主要從以上兩方面來(lái)進(jìn)行分析和闡述。
3.1 多傳感器融合技術(shù)
系統(tǒng)需要感知周圍環(huán)境,那么列車的安全定位精度和安全速度越準(zhǔn)確,感知到的環(huán)境精度越高。那么決策也就最安全,最優(yōu)。否則,可能導(dǎo)致問(wèn)題或者事故的發(fā)生。所以,傳統(tǒng)的速度傳感器加上應(yīng)答器已經(jīng)無(wú)法滿足列車保持定位的需求。參考紐約地鐵改造的相關(guān)文檔,采用以下的傳感器方案,能夠保證安全定位測(cè)速的同時(shí),還能夠提供障礙物檢測(cè)功能,以滿足LOA2的要求。如圖1所示。
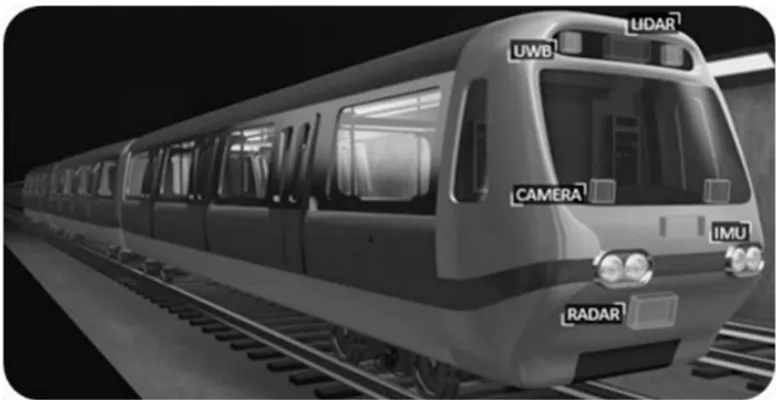
圖1 基于新型傳感器融合的列車定位技術(shù)
結(jié)合傳統(tǒng)的速度傳感器和應(yīng)答器,采用傳感器融合技術(shù),能夠提高列車的定位精度。同時(shí),采用雷達(dá)可以檢測(cè)列車前方的障礙物,并使用激光雷達(dá)來(lái)精確測(cè)量列車距離前方列車的目標(biāo)距離,保證列車安全停車功能。
多傳感器融合技術(shù),涉及到相關(guān)算法的精度和安全認(rèn)證要求,有待專門分析和研究。
3.2 AI技術(shù)
采用AI技術(shù),保證列車在大量的運(yùn)行過(guò)程中,學(xué)習(xí)各種故障場(chǎng)景的處置流程和方法。這樣可以保證列車在以后碰到類似故障情況下,可以更快更優(yōu)地進(jìn)行自主處置和分析。
通過(guò)調(diào)查和統(tǒng)計(jì)發(fā)現(xiàn),人的可靠性比AI機(jī)器的可靠性要低很多。因此,AI技術(shù)的應(yīng)用,未來(lái)可能在故障處置的某些方面優(yōu)于人工處置。
AI技術(shù)的安全性有待證明,所以,本文提出了基于AI融合的方案來(lái)提高AI技術(shù)的安全性。例如,采用雷達(dá)識(shí)別和圖像識(shí)別技術(shù)的算法融合來(lái)降低AI技術(shù)誤判的可能性,提高障礙物識(shí)別的安全性。人和AI機(jī)器的可靠性對(duì)比分析如圖2所示。

圖2 人和AI機(jī)器的可靠性對(duì)比分析
4 系統(tǒng)典型場(chǎng)景分析
為了深刻理解自主列車控制系統(tǒng),通過(guò)以下場(chǎng)景的分析,突出了自主列車控制系統(tǒng)的優(yōu)勢(shì):
(1)正常場(chǎng)景,
(2)車地通信故障場(chǎng)景,
(3)火災(zāi)場(chǎng)景。
4.1 正常場(chǎng)景
如圖3所示,在TACS中不再需要巡道車來(lái)完成早上的巡道任務(wù)。投入載客運(yùn)營(yíng)的列車具備自主巡道功能。列車接收到任務(wù)或者根據(jù)時(shí)刻表來(lái)運(yùn)行。如果自主列車在運(yùn)行過(guò)程中,遇到障礙物,則會(huì)自動(dòng)在障礙物前方停車并上報(bào)故障信息。同時(shí),如果前方軌道狀態(tài)不平順,列車主動(dòng)降速,保證運(yùn)行安全,同時(shí)主動(dòng)上報(bào)軌道的健康狀態(tài)。這也是自主列車控制系統(tǒng)的優(yōu)勢(shì)。
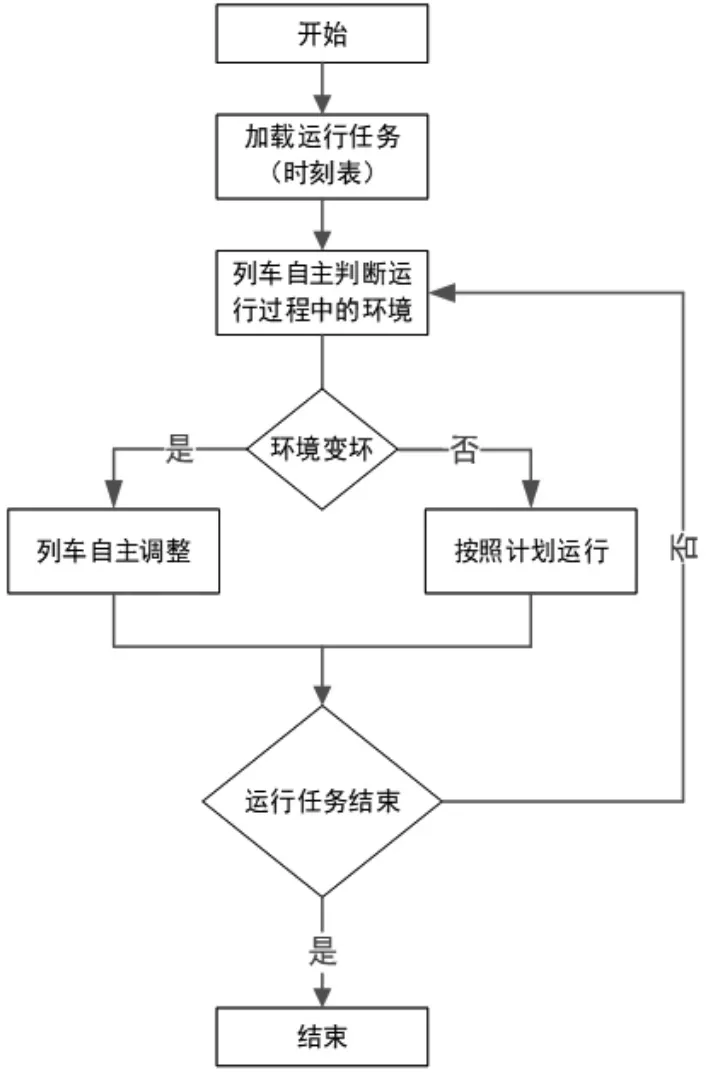
圖3 自主列車運(yùn)行系統(tǒng)正常場(chǎng)景流程圖
當(dāng)列車感知到雨雪天氣,自動(dòng)降低制動(dòng)率值,減少打滑的情況發(fā)生。保證良好的運(yùn)行狀態(tài)。同時(shí),根據(jù)計(jì)劃,判斷列車的早晚點(diǎn)情況而自動(dòng)調(diào)整運(yùn)行等級(jí)。
因此,TACS通過(guò)傳感器,實(shí)現(xiàn)部分非通信信號(hào)專業(yè)設(shè)備的故障監(jiān)測(cè)功能。
4.2 車地通信故障場(chǎng)景分析
當(dāng)車地通信發(fā)生故障時(shí),在原來(lái)的CBTC系統(tǒng)中,列車必須要先停車然后人工切換到后備模式。這不僅影響了本身列車的運(yùn)行效率。同時(shí)也給周圍的列車帶來(lái)了運(yùn)行中斷的影響。從而,降低了整個(gè)系統(tǒng)的運(yùn)行效率,提高了整個(gè)系統(tǒng)的運(yùn)行安全風(fēng)險(xiǎn)。
但是,在TACS系統(tǒng)中不存在這個(gè)問(wèn)題。如果車地通信故障,列車完全靠自身傳感器感知前方的安全運(yùn)行距離。不需要列車停車切換的這個(gè)過(guò)程。也不影響周圍其他列車的正常運(yùn)行。這也是TACS系統(tǒng)為了解決CBTC故障情況下降級(jí)到后備模式的痛點(diǎn)。
4.3 火災(zāi)場(chǎng)景
如圖4所示,碰到火災(zāi)情況下,傳統(tǒng)的方式主要依靠調(diào)度員的經(jīng)驗(yàn)來(lái)處理,根據(jù)隧道內(nèi)的風(fēng)向,發(fā)生火災(zāi)列車的位置,以及前后列車的情況來(lái)分別發(fā)布調(diào)度命令給每個(gè)列車。這樣的處置過(guò)程和反應(yīng)時(shí)間相對(duì)比較長(zhǎng)。

圖4 火災(zāi)場(chǎng)景
但是,自主列車基于AI技術(shù)自主學(xué)習(xí)故障場(chǎng)景的處置方法,根據(jù)經(jīng)驗(yàn)和規(guī)范,以及故障場(chǎng)景下的“環(huán)境”,更加快速地處置這種火災(zāi)場(chǎng)景。因此,在類似這樣的故障場(chǎng)景下,自主列車比司機(jī)和調(diào)度員的反應(yīng)更快,處置時(shí)間更少,可以減少很多不必要的損失。
因此,采用AI技術(shù),通過(guò)大量故障場(chǎng)景的學(xué)習(xí),使自主列車的“經(jīng)驗(yàn)”更豐富。
本文分析了自主列車運(yùn)行控制系統(tǒng)不同等級(jí),以及不同等級(jí)下的功能分析。同時(shí),本文提出了TACS需要考慮的多傳感器融合技術(shù)和AI技術(shù),以及相關(guān)的安全功能。通過(guò)對(duì)比分析不同場(chǎng)景下的TACS系統(tǒng)運(yùn)行情況,突出了TACS相比CBTC系統(tǒng)的優(yōu)點(diǎn)。但是,TACS系統(tǒng)關(guān)鍵技術(shù)的解決,有待相關(guān)廠商具體解決。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年1期)2021-03-19 08:28:38
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
