智能型條帶式免耕播種機的設計與研究
2021-02-28 04:24:16趙菁
農業技術與裝備 2021年12期
關鍵詞:設計
趙 菁
(山西省農業機械發展中心,山西 太原 030002)
保護性耕作是對農田實行免耕、少耕,并用作物秸稈覆蓋地表,減少土壤風蝕、水蝕,從而提高土壤肥力和抗旱能力的一項先進農業技術[1]。其核心就是免耕播種技術,即土地收獲后不翻耕,在留茬地上直接用特制的免耕播種機進行播種作業。
目前,我國的免耕播種設備大多是中低端機具,對機電液一體化自動控制技術應用較少,如在粉碎拋撒、播種覆土等關鍵作業環節無法做到實時監測、變量調控作業[2]。同時,由于材料選用、加工工藝等制約,通常存在機具故障率高、使用壽命短等缺陷[3]。因此,迫切需要研發出具有能夠優化機具性能,提升機具自動化、智能化水平的免耕播種機。
1 研究內容
1.1 液壓動力源的研究
拖拉機掛接農具形成懸掛式機組,一般動力傳遞是通過機械傳動系統傳遞到工作部件上,這種傳動形式效率不高、結構復雜、不利于智能化部件的工作。為此,需要開展液壓動力源的研究,以拖拉機與農具掛接的懸掛架為平臺,開發液壓動力裝置,包括油箱設計、液壓系統設計、主要部件選型等,使其不僅具有農具掛接功能,還可以輸出液壓動力,滿足農具工作部件的動力需求[4]。
1.2 條帶式種床制備裝置的研究
根據條帶式免耕技術的要求,開展立式旋耕部件的研究,包括刀具結構及形式、動力傳遞、運動學和動力學分析等,在有限條帶區域上形成適合種子發育生長的種床,為后續的播種作業創造條件。
1.3 智能化種子空間定位機構的設計研究
針對現有開溝器和覆土器播深穩定性差、鎮壓強度不準確、種子在土壤中的定位精度低等問題,根據旱作農業技術的要求,開展智能化土壤開溝部件、鎮壓部件、仿形機構及液壓控制系統的研究,實現種子在土壤中的精準定位和鎮壓強度的智能調節,滿足不同土壤含水率條件下的播種要求。
1.4 智能化系統集成與試驗
在完成主要工作部件研究和試制的基礎上,根據旱作農業技術要求,開展智能化條帶式免耕播種機整機技術集成和研發,解決主要工作部件空間布局、機組掛接穩定性、機電液融合等技術難題,完成樣機試制和性能試驗。
2 樣機總體設計
2.1 整體結構及工作原理
智能型條帶式免耕播種機結構見圖1,主要由旋耕機1、種肥箱組件2、排肥器3、外槽輪式、排種器4、鎮壓輪調節組件5、鎮壓輪6、排種開溝器7、施肥開溝器8、排種、排肥傳動系統9等組成。
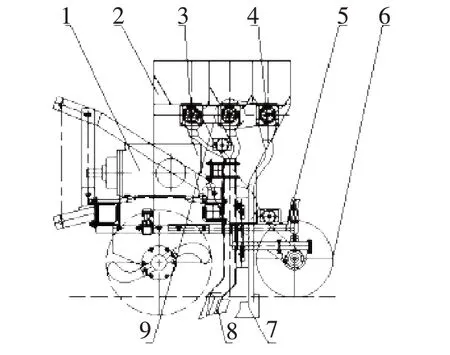
圖1 智能型條帶式免耕播種機結構圖Fig.1 The structure of intelligent strip no tillage planter
工作時,旋耕機由拖拉機帶動先進行旋耕整地作業,再由鎮壓輪充當地輪將動力傳輸到排肥、排種器,再由輸肥、輸種軟管將種、肥引到開溝器組件,排入由開溝器開好的施肥和播種溝中以達到施肥播種的目的,最后再由鎮壓輪將土壤壓實。
2.2 技術參數
智能型條帶式免耕播種機技術參數見表1。
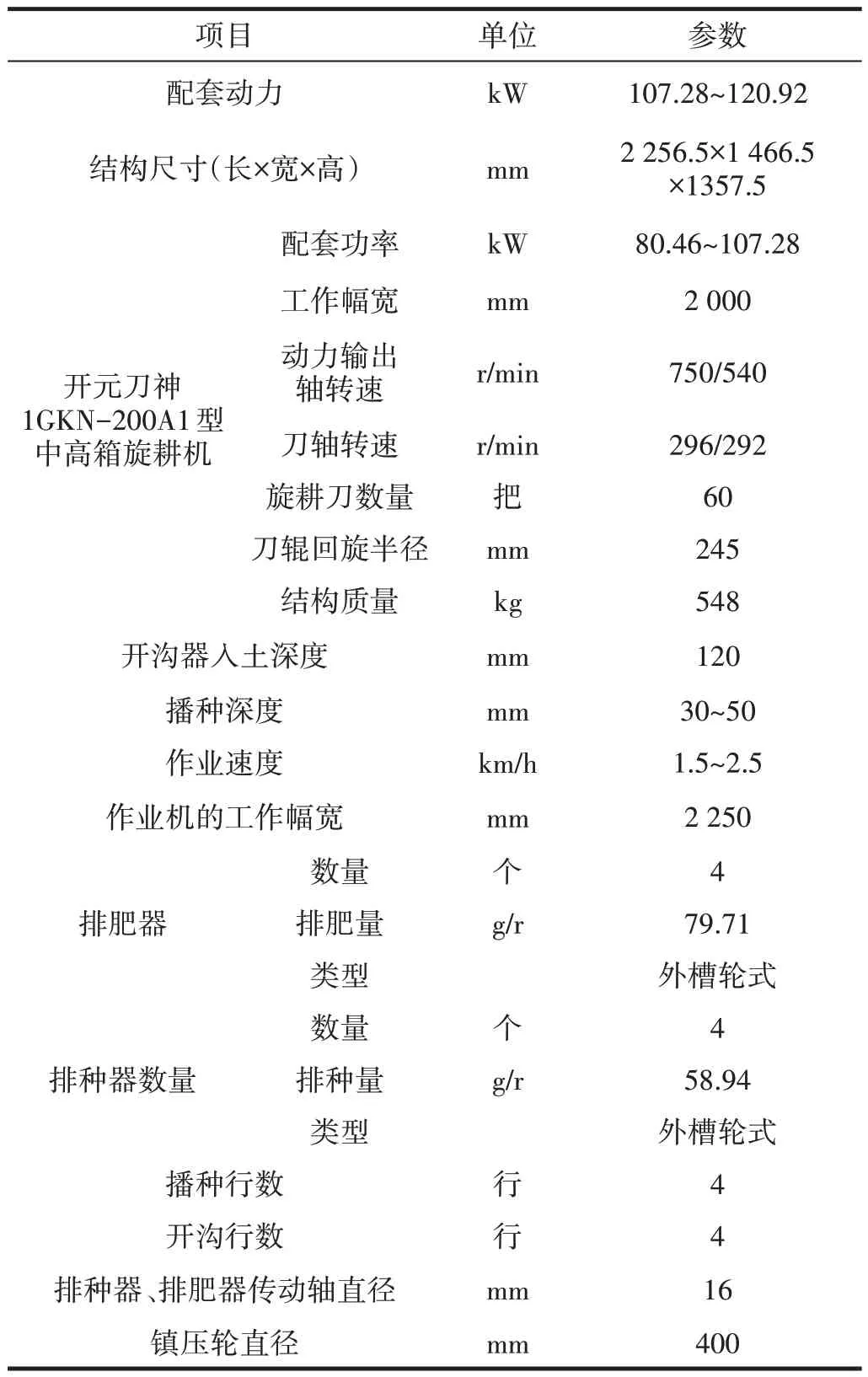
表1 技術參數表Tab.1 The technical parameters
3 主要部件設計
3.1 施肥開溝器的設計
智能型條帶式播種機施肥開溝器由前刀、底板、底座連接板組成。結構見2。
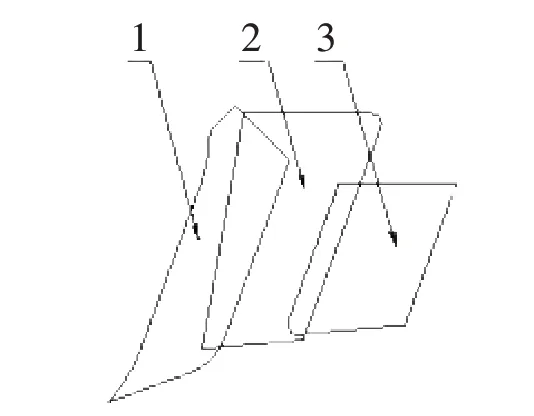
圖2 開溝器結構組成圖Fig.2 The structural composition of ditcher
施肥開溝器主要設計有前刀入土角、開溝器入土深度、前刀、連接板和底座之間距離還有相關的一些參數,其結構參數見圖3。開溝器前刀入土角為51°,最大入土角為70°,入土深度120 mm,前刀頭距離底座距離96 mm,前刀入土點和連接板高度30 mm,前刀入土點和底座高度38 mm。3個構件由焊接來連接,材料選擇強度較高Q235鋼板。
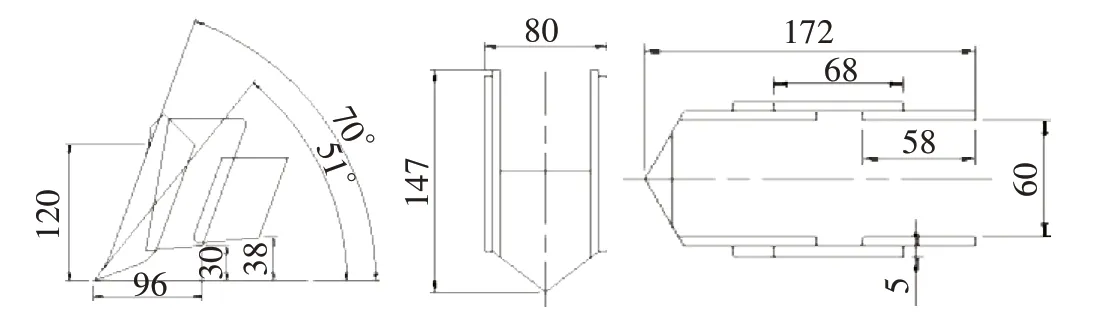
圖3 施肥開溝器結構參數圖Fig.3 The structural parameters of fertilizer opener
3.2 排種開溝器的設計
智能型條帶式播種機排種開溝器結構見圖4。開溝器主要設計有前刀入土角、開溝器入土深度、前刀、連接板和底座之間距離及相關參數。開溝器前刀入土角為13°,入土深度100 mm,前刀頭距離底座距離為150 mm,后連接板高度為120 mm,構件由焊接來連接,材料選擇強度較高的Q235鋼板。
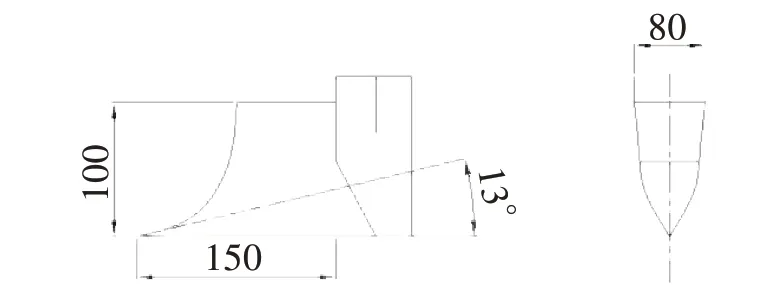
圖4 排種開溝器結構參數圖Fig.4 The structural parameters of seed metering ditcher
3.3 種肥箱的設計
3.3.1 種肥箱容量的計算
通過上文數據可知所需復合肥為375 kg,復合肥所需容量為106 L;所需有機肥為375 kg,有機肥容量為120 L;所需種子量為150 kg,種子容量為90 L。通過容量來確定種肥箱大小,種肥箱長度是確定的,為2 250 mm,設定種肥箱側板高度為60 mm,則可得復合肥箱需要寬度為79 mm;有機肥箱需要寬度為89 mm;種箱所需寬度為67 mm。
3.3.2 種肥箱組件的設計
智能型條帶式播種機是由旋耕機和播種施肥機相結合的結構,為了節省機械所占用的空間選擇從旋耕機兩側連接側板,在側板上布置播種器、排肥器的位置。種肥箱組件的側面設計的相關數據見圖5,側面板長為720 mm,高為902.5 mm,厚度為3 mm,采用對稱布置。種肥箱選擇與側板一體焊接,這樣裝配有宜于維修和清潔。
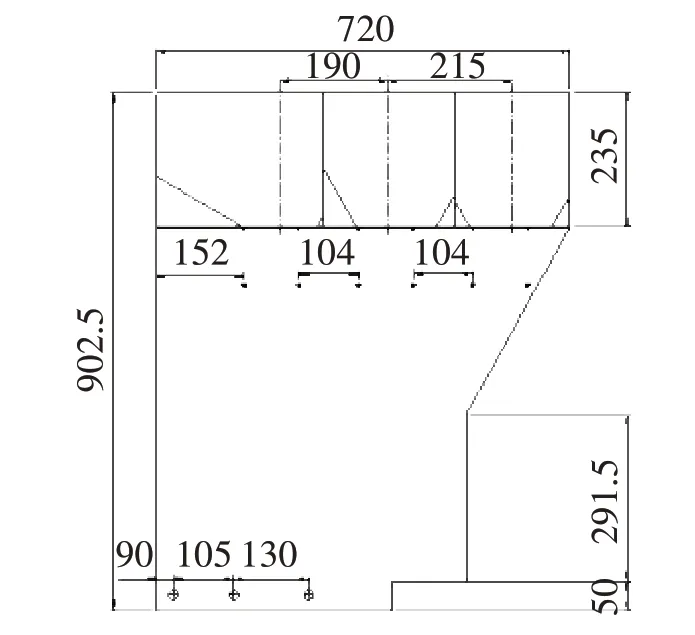
圖5 側板種肥箱尺寸數據圖Fig.5 The dimension data of side plate seed fertilizer box
3.4 鎮壓機構的設計
3.4.1 總體結構
從總體設計角度,鎮壓輪要與機構連接并且在下地工作時根據地形變化可調,所以設計時需從機架兩側加出方管,并與和鎮壓輪連接的可調鉸支方管相連接,外加可調節控制高低變化的螺紋鉸接控制組件。鎮壓機構的總體結構如圖6所示,其運動示意見圖7,從圖6 可以看出該結構采用了鉸接和絲杠的連接方式以達到調節和移動鎮壓輪高度的目地。
圖6 鎮壓機構的結構圖 Fig.6 The structure diagram of pressing mechanism
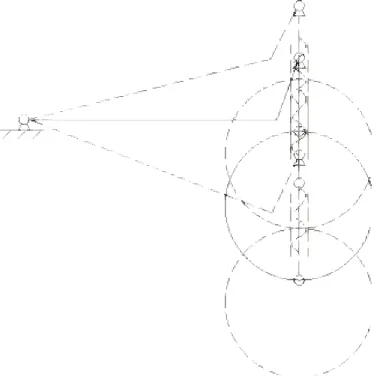
圖7 運動示意圖Fig.7 The movement diagram
3.4.2 方管的選擇和位置布置
2個方管都選擇40 mm×40 mm;連接方管選擇與旋耕機側板上2個螺栓孔作為定位,確定位置進行鉆孔由螺栓連接;連接方管選擇長度為740 mm、調節方管選擇長度為560 mm,2個方管平行布置距離為52.8 mm。
3.4.3 調節方管與連接方管鉸接側板的設計
調節方管和連接方管選擇用鉸接銷軸連接,在調節方管上焊接2個對稱布置的側板作為與連接側板進行鉸接所用的連接板,結構見圖8。
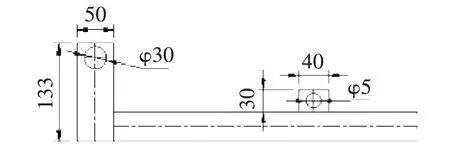
圖8 鉸接孔連接側板設計圖Fig.8 The design drawing of hinged hole connecting side plate
與方管焊接的側板長133 mm,寬50 mm,厚度10 mm,在側板和連接方管上鉆出直徑為30 mm 的孔來連接銷軸使得調節方管可以鉸支調節。高度調節的側板長為30 mm,寬為40 mm,厚度為5 mm,中心位置鉆孔徑20 mm 的通孔。連接方管上需要焊接調節高度側板用來連接調節組件,設計見圖9。側板厚度為5 mm,寬為40 mm,長度為170 mm,與方管成80°角焊接。
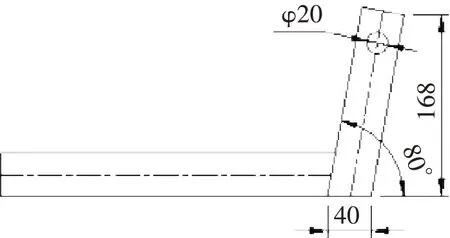
圖9 可動鉸接點側板設計圖Fig.9 The design drawing of movable hinge joint side plate
3.5 調節裝置的設計
調節裝置選擇用2個螺紋軸加絲杠通過不同的螺紋旋轉方向來調節整體的高低變化,設計結構見圖10,該組件上下都為螺紋桿但是2 個方向旋入方向相反,當需要調節高度時在4 調節孔中插入軸來轉動2 調節套,以達到調節鎮壓輪高度的作用。調節極限位置為上下可分別移動50 mm。
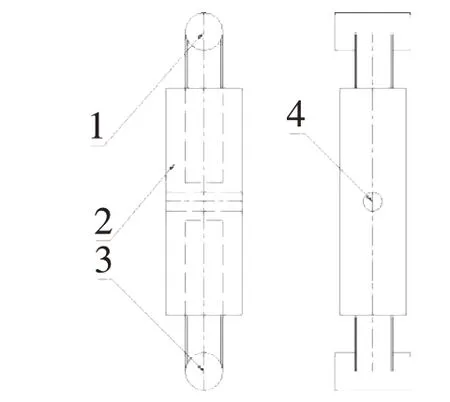
圖10 調節絲杠結構圖Fig.10 The structure diagram of adjusting lead screw
4 排肥量、排種量計算
4.1 排肥器排肥能力計算
依據農業機械設計手冊,外槽輪排肥器每轉的排肥量計算公式如下:

式中:d——外槽輪直徑,cm;L——槽輪有效工作長度,cm;λ——帶動層系數;fn——單個凹槽的截面積,cm2;t——槽輪凹槽截距,cm,z 為槽數;α0——肥料充滿系數0.7;γ——肥料密度,g/L。
由測量計算可得:d=0.590 cm,L=4.00 cm,λ=0.2,fn=1.625 cm2,t=3.09 cm,γ=1.4
求得q=58.94 g/r。
再由農業機械設計手冊中的排肥器每公頃的排肥總量:

式中:Q——每公頃排肥量,kg;D——鎮壓輪直徑,m;b——排肥量數量;m——行距,m;δ——滑移率,10%;i——鏈輪傳動比;q——排肥量每轉的排肥量,g/r;
根據實際情況,種植0.067 hm2小麥所需復合肥量為25 kg,有機肥量為25 kg。
4.2 排種器排種量計算
依據農業機械設計手冊,外槽輪排種器每轉的排種量計算公式如下:

式中:q——排種輪每轉排種量,g/r;d——外槽輪直徑,cm;L——外槽輪有效工作長度,cm;C——帶動層厚度0.4 cm;γ——種子容量,0.8 g/cm3;α——種子充滿系數,0.8;f——凹槽斷面積,cm2;t——槽齒間距,cm;
由測量計算可得:d=6.90 cm,L=5.50 cm,f=1.69 cm2,t=3.10 cm,求得q=79.71 g/r。
再由農業機械設計手冊中的排種器每公頃的排種總量Q公式:

式中:Q——每公頃播種量;D——鎮壓輪直徑,m;b——排種量數量;δ——滑移率,10%;i——鏈輪傳動比;q——排種器每轉的排種量,g/r;
根據實際情況,現在種植每0.067 hm2小麥所需種子為9.98 kg。
5 主要工作部件的強度校核
5.1 鎮壓輪傳動軸強度校核
5.1.1 鎮壓輪傳動軸結構
為了保證傳動效率,鎮壓輪傳動軸設計為六方軸傳動,與原來的圓軸傳動相比穩定性有所提高,其結構見圖11。
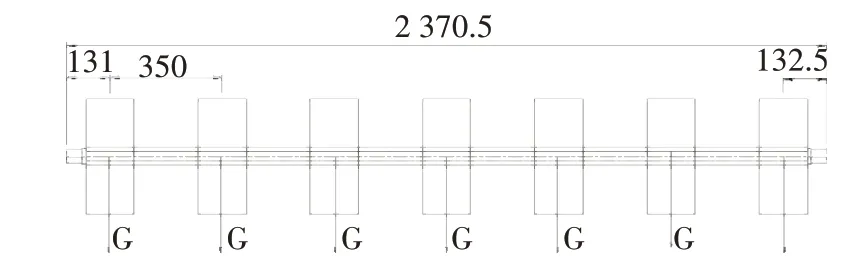
圖11 六方軸連接鎮壓輪示意圖Fig.11 The schematic diagram of hexagonal shaft connecting pressing wheel
5.1.2 強度校核
由于六方軸要連接鎮壓輪,所以需要校核連接軸承處的彎曲強度是否達標,已知單個鎮壓輪質量為20 kg。

圖12 六方軸彎矩圖Fig.12 The bending moment diagram of hexagonal axis
六方軸材料為Q235 鋼管,其彎曲應力為120~190 MPa,計算校核結果為滿足要求。
由于鎮壓輪六方軸為傳動軸,所以只承受扭轉應力而不承受彎曲應力,所以只需要校核扭轉強度,根據公式

式中:τC——軸許用應力,MPa;Dc——六方軸外軸直徑,m;dc——六方軸內軸直徑,m;T1——傳動軸計算轉矩,N·m。

所以由計算得鎮壓輪傳動軸可以滿足該機的傳動要求。
5.2 排種器、排肥器傳動軸強度校核
5.2.1 排種器、排肥器傳動軸結構
該機構排種器、排肥器選用的傳動軸都為直徑為16 mm的傳動圓軸。
5.2.2 強度校核
由于排種、排肥傳動軸只承受扭轉應力而不承受彎曲應力,所以只需要校核扭轉強度,根據公式


由計算可得排種、排肥軸符合強度要求。
5.3 機構穩定性校核
5.3.1 輪式拖拉機懸掛機組的縱向穩定性
后懸掛農具降低了拖拉機的縱向穩定性,尤以運輸狀態最為危險[5]。為保證運輸時拖拉機的穩定性和操縱性,懸掛農具的質量不宜過大,其極限質量用以下公式計算:

5.3.2 輪式拖拉機懸掛機組的最大爬坡角
為了防止拖拉機懸掛機組上坡時,不向后翻傾,還必須驗算機組在最大爬坡角或臨界上坡角αmax上前輪的載荷。最大爬坡角計算公式:

式中:Pq——驅動輪的切向力,N;Pf1、Pf2——拖拉機前、后輪的滾動阻力,N。
假設拖拉機在理想路面上行駛時,Pf1、Pf2≈0,此時

式中:PTmax——拖拉機最大掛鉤牽引力,kN。
由拖拉機性能得PTmax=34.0 kN,Gs=3 670 kg,機具實際質量為G=800 kg,帶入公式(9)得sinαmax=0.09。
拖拉機在最大陡坡角上行駛時,前軸的載荷為

式中:h1、h2——拖拉機和農機具的重心高度,mm。
在最大斜坡角上,R1y≥拖拉機不帶農機具時20%,代入數據得R1y=1 066.6,拖拉機不帶農機具時R1=1394.2,驗證得設計符合要求。
5.3.3 拖拉機提升能力校核
油缸提升能力的計算。由于計算法繁瑣,一般用繪制速度圖,進行提升能力的計算。
把機構上作用力F、G 分別地加到速度圖的相應點,力的大小和方向不變由力矩平衡得

式中:F——作用在油缸活塞上的力,N;G——懸掛農機的質量,G=Mg,M——懸掛農具質量;η——機械效率,取0.8~0.9;m與n——從圖上量出地力臂長度,mm。
在已知拖拉機懸掛軸上提升能力的情況下,可按下法來校核配套懸掛農具對拖拉機懸掛軸的垂直負荷。
2 個校核公式校核的位置都為最大耕深、1/2 耕深、耕深為0、1/2 運輸間隙、最大運輸間隙著5 個位置算出來的最大F值,應不超過油缸最大推力,最大Qy≤標準垂直負荷。通過計算校核可得設計的農機具符合要求。
6 結語
通過樣機的田間試驗,智能化條帶式免耕播種機的研究基本實現了農具液壓動力裝置、智能化種床制備及種子空間定位技術2 項技術突破。技術創新點:一是條帶式種床裝備技術,采用立式旋耕工作部件,對土壤的擾動少,更加符合保護性耕作技術的思想和要求;二是智能化種床制備和種子空間定位技術,通過土壤含水率實時控制播種深度和鎮壓強度,實現播種作業的智能化,有利于提高農機裝備的技術水平和保證作業質量。總之,研制開發智能化條帶式免耕播種機,為有機旱作農業發展和保護性耕作技術的實施提供了新型作業裝備,不僅有利于提高農業機械化技術水平,而且有利于保護性耕作技術的推廣和應用,為實現農業的可持續發展,提供了有力的技術保障。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04