動態實時導航與數字化導板導航牙種植精確度的比較
2021-02-26 02:45:20趙婭琴劉艾芃岑峰楊凱文李艷芳鄧文正
口腔疾病防治 2021年3期
關鍵詞:手術
趙婭琴, 劉艾芃, 岑峰, 楊凱文, 李艷芳, 鄧文正
1. 梧州市紅十字會醫院口腔科,廣西 梧州(543002); 2. 右江民族醫學院口腔醫學院,廣西 百色(533000);3. 梧州市紅十字會醫院醫學影像科,廣西 梧州(543002)
在缺失牙種植修復過程中,種植體的準確植入是成功的前提之一,也是完成高質量修復的重要保證。最佳的三維種植體放置對于種植修復至關重要,可以確保種植牙良好的功能、美學和種植體周圍組織的長期健康[1?2]。隨著數字化種植技術的發展,動態實時導航和數字化導板導航種植技術在臨床上應用逐漸廣泛,兩者均能一定程度上實現牙種植術的微創與精準,彌補傳統種植手術的不足[3]。動態實時導航與數字化導板導航種植技術的操作方法、實現原理等方面存在一定的差異[4],而這兩種技術的精確度比較報道較少。本研究擬比較分別在動態實時導航與數字化導板導航下植入的種植體位置的精確度,以期為臨床導航種植技術的應用提供參考。
1 材料和方法
1.1 主要設備與材料
Mimics16.0(Materialise 公司,比利時),口腔種植手術導航系統(蘇州迪凱爾醫療科技有限公司,中國),六維齒科種植導板專業設計軟件、數字化種植導板、導板手術器械盒(杭州六維齒科醫療技術有限公司),SO?MATOM Definition 螺旋CT(西門子公司,德國),Objet connex350 3D 打印機(Stra?tasys 公司,美國),Straumann 種植工具盒、Strau?mann 種植體(Straumann 公司,瑞士)。
1.2 研究對象
選擇2018 年4 月至2019 年12 月于梧州市紅十字會醫院口腔科行種植牙手術需植入種植體共70顆(患者46 例),隨機分為動態實時導航種植組和數字化導板導航種植組。每組35 顆種植體,均行種植手術植入缺牙區。參與手術的患者年齡19~71 歲,平均年齡(49.76 ± 13.69)歲。納入標準:①缺失牙超過3 個月的牙列缺損,缺牙區有充足的骨量;②接受應用動態實時導航或數字化導板導航種植技術進行種植修復缺失牙;③全身健康狀況良好;④有足夠的開口度。排除標準:存在重度牙周病或其他嚴重口腔疾病者;2 年內接受過頭頸部放療或者正在接受頭頸部放療。本課題經梧州市紅十字醫院倫理委員會批準(No. LL2018?8),患者均簽署知情同意書。
1.3 操作方法
1.3.1 動態實時導航種植組 患者術前均安裝U型管(配準裝置)拍攝CT,拍攝后取下并保存U 型管。由同一醫師將CT 數據導入口腔種植手術導航軟件三維重建后進行種植體位置設計。常規術前準備并調整導航儀,將其置于距離患者頭部前方約1.25~1.5 m,45~60 °角度位置,完成器械連接,進行參考板標定。標定完成后,安裝固定裝置,并將U 型管完全復位于缺牙區進行配準。配準完成后,進入導航,導航警示閾值設置為位移偏差0.2 mm,角度偏差2°,深度偏差0.2 mm。由同一醫師在動態實時導航技術引導下進行種植體植入手術,精確地完成植入孔的預備和種植體的植入。見圖1。
1.3.2 數字化導板導航種植組 患者術前均拍攝CT,在六維齒科種植導板專業設計軟件中完成種植體位置設計和牙支持式導板設計,將數據導入至成型設備進行導板加工制作。常規術前準備,由同一術者進行導板試戴,就位后確認鉆頭進入方向與套環方向一致后進行導板固定,在數字化種植導板導航下逐級備洞,完成種植體的植入。見圖2。
1.3.3 數據采集 兩組患者拍攝術后CT,將術前設計方案和術后CT 數據導入Mimics16.0 軟件。術后CT 三維重建后通過整體配準功能將重建模型與植入前模型進行配準。使用系統自帶測量工具對術后實際與術前規劃種植位置的頸部、根尖部、深度和角度偏差進行測量并記錄。測量點取種植體頸部、根尖部橫截面的中心點,定點后直接測量兩點間的距離,深度偏差值取根尖部二者垂直距離。每一個指標由同一操作者連續重復測量3 次,取平均值。

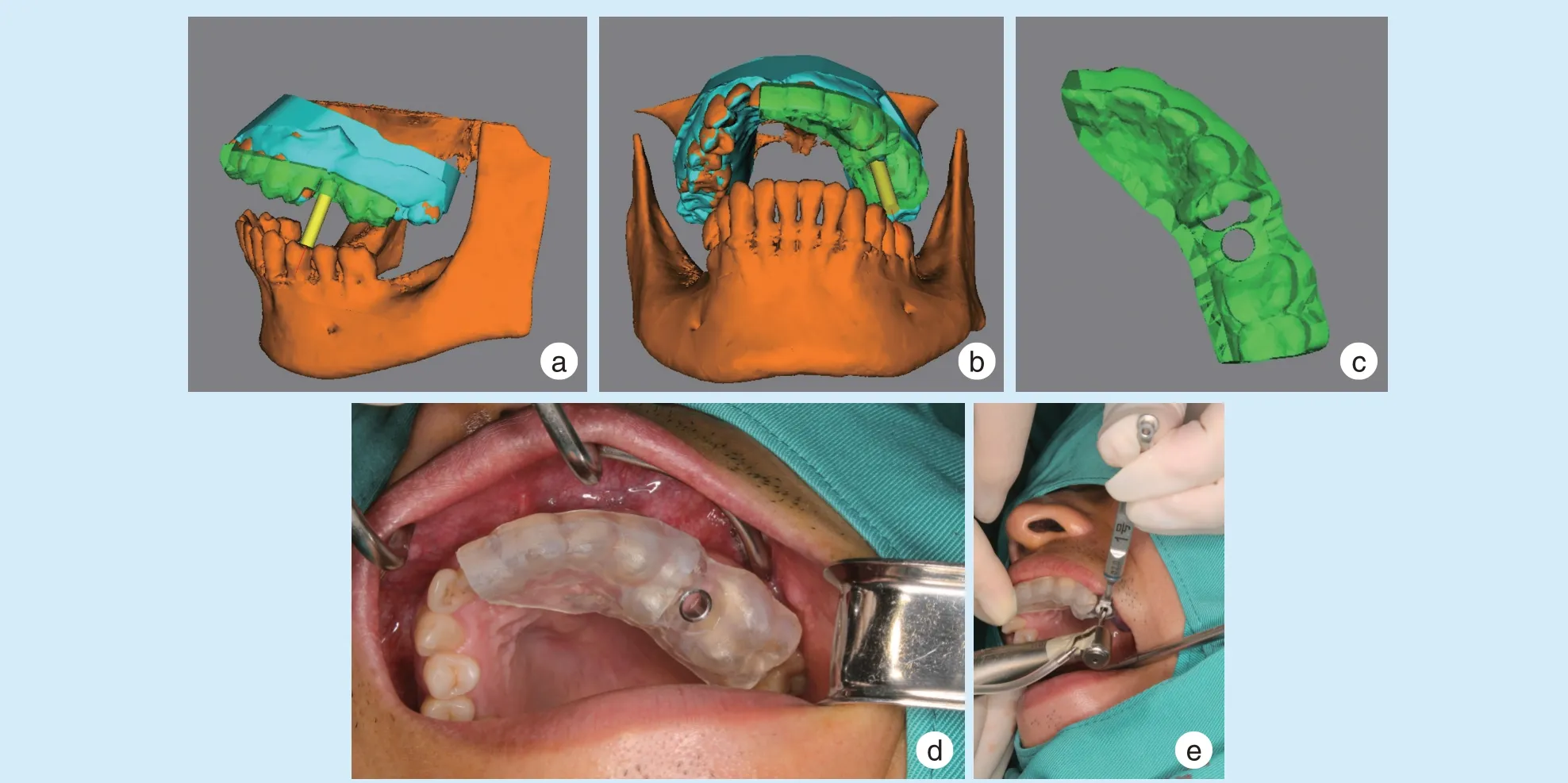
Figure 2 Digital guide of the implant procedure圖2 數字化導板導航種植手術過程
1.4 測量指標
記錄植體虛擬和實際植入位置的偏差情況:種植體頸部(植體最上緣橫軸面)中心點、根尖部、深度的距離偏差(mm)和角度偏差(°)。見圖3。
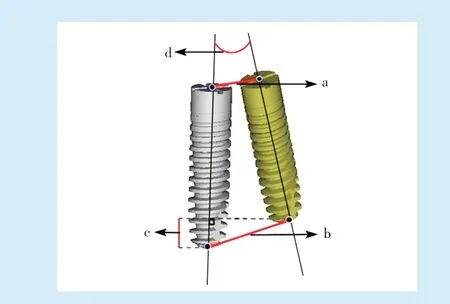
Figure 3 Model of measurement and deviation parameters圖3 測量模型圖和測量指標
1.5 統計學方法
運用SPSS21.0 軟件進行統計學分析,兩組病例中的計數資料采用χ2檢驗進行分析,計量資料用x±s表示,用Shapiro?Wilk 檢驗各組數據的正態性,符合正態分布的兩組間均數比較采用完全隨機設計t檢驗進行比較,不符合正態分布的兩組間均數采用Mann?WhitneyU檢驗,檢驗水準α=0.05。
2 結 果
2.1 一般資料與植牙區牙位分布資料
動態實時導航種植組患者年齡19~71 歲,平均(52.18 ± 14.15)歲,男11 例,女11 例;數字化導板導航種植組患者年齡24~70 歲,平均(47.54 ±13.16)歲,男16 例,女8 例。兩組患者的年齡和性別組成分別經過完全隨機設計t檢驗和χ2檢驗進行對比,無顯著差異(P>0.05),具有可比性。
動態實時導航種植組植牙區牙位分布:前牙區9 例,前磨牙區12 例,磨牙區14 例;數字化導板導航種植組植牙區牙位分布:前牙區15 例,前磨牙區7 例,磨牙區13 例。經過χ2檢驗,兩組患者的植牙區牙位分布差異均無統計學意義(P>0.05),排除了患者的植牙區牙位分布對本次研究結果的影響。見表1。

表1 兩組患者植牙區牙位分布資料分析Table 1 Comparison of positions forimplanteeth data between two groups n=35
2.2 治療結果
本研究共植入70 顆種植體,每個病例均完成種植體的植入,術后未見明顯的不良反應。術后3個月隨訪率100%,所有種植體良好,未發現種植體周圍牙齦炎癥和松動等情況,影像學復查結果未見明顯的骨吸收。
2.3 相關指標的比較結果
動態實時導航種植組的種植體根尖部、深度和角度偏差均小于數字化導板導航種植組,差異均具有統計學意義(P<0.05);兩組種植體頸部中心點偏差差異無統計學意義(P>0.05)。見表2。

表2 兩組種植體偏離程度相關指標比較Table 2 Comparison of various parameters of the accuracies between two groups x±s
3 討 論
目前數字化種植導板應用于臨床越來越常見;相對于傳統自由手種植方法,數字化導板導航種植技術能控制鉆孔的位置和深度,減少下牙槽神經損傷等風險[5];但其仍存在一定的局限性,如種植導板的支持方式選擇、冷卻障礙、視野受限、不支持動態調整設計以及導板厚度占據操作空間等[6]。動態實時導航種植技術的發展拓寬了精準種植的適用范圍;其與種植手術的結合,能夠在不影響冷卻的情況下監控鉆針三維位置與重要解剖結構的位置[7],尤其適合局部解剖條件復雜、種植部位深在的種植病修復例[8?9]。目前國內動態實時導航種植技術的設備一次性投入大,相對數字化導板導航種植技術臨床應用不多,關于動態導航相關的文獻也多為疑難病例匯報。
研究表明,當嚴格選擇病例、合理設計和謹慎操作時,采用數字化導航種植技術的成功率與傳統自由手種植方式相比無明顯差異[10]。本研究采用動態實時導航和數字化導板導航種植技術實施種植手術,采用隨機化方案,由同一名口腔醫師在相同環境下實施,有效消除選擇性偏差和控制實驗的可變因素[11]。為了盡量減少誤差,術者與主要操作者均經過專業培訓和試驗操作,滿足學習曲線要求后開展試驗。本研究兩組種植手術過程均順利,術后種植體位置與術前種植體設計位置在種植體頸部、尖端、深度的平均距離偏差低于種植安全范圍,角度偏差低于4°,該結果與Tahmaseb等[12]在1 530 顆種植體中測得的種植體平均偏差安全范圍相當,說明動態實時導航種植與數字化導板導航種植具備臨床應用安全性和較高的精確性。
盡管目前動態實時導航及數字化導板導航較自由手種植技術有更高的精確性,但兩者在臨床應用過程中仍然會產生一定的誤差。Kaewsiri等[10]研究數字化導航種植在單顆牙缺失位點植入種植體的精確度,結果顯示,數字化導板組種植體頸部和種植體尖端偏差分別為(0.97 ± 0.44)mm 和(1.28 ± 0.46)mm,角度偏差為(2.84 ± 1.71)°;動態實時導航組頸部偏差(1.05 ± 0.44)mm,根尖偏差(1.29 ± 0.50)mm,角度偏差(3.06±1.37)°。Block等[5]評估了478 例涉及714 個種植體的患者的前瞻性數據,對于動態實時導航,平均角度偏差為(2.95 ± 0.25)°,平均總體平臺位置偏差為(1.15 ±0.06)mm,平均總體尖部位置偏差為(1.28 ± 0.07)mm,提出使用動態導航可以實現種植體植入的準確性和精確性。Van Assche 等[13]對數字化導板系統的研究結果顯示種植體頸部平均誤差0.99 mm、根方平均誤差1.24 mm、角度平均誤差3.81°。本研究中的動態實時導航和數字化導板導航種植的偏差與以上研究相似。
動態實時導航和數字化導板導航種植手術均由系統的流程組成,因此在這個臨床應用過程中任何一個環節產生的誤差都將對手術整體的精確度有影響。動態實時導航種植的誤差來源主要包括:術前CT 的拍攝、導航系統軟件的內部參數設定、標定和配準過程以及術者在手術中的操作表現[8]。數字化導板導航種植的誤差來源主要包括:術前CT 的拍攝、模型的制取、導板的設計、固定和術者操作表現[14?15]。
本研究結果顯示,兩組種植技術術前術后植體的頸部偏差無明顯差異,而根尖偏差、深度偏差和角度偏差有顯著性差異,原因可能是角度的偏差導致的根尖及深度的偏差。無論是動態實時導航組還是數字化導板導航組均能有效控制種植體植入點的位置[16]。
Block 等[5]在前瞻性研究中合并不同術者動態導航輔助下植入種植體精確度發現不同術者之間唯一的區別就是角度偏差;因此,無論何種技術,角度偏差尤為重要,合適的種植體軸向能降低后期修復及種植體的護理的復雜度。
此外,本研究還發現數字化導板導航組的角度誤差較大,且基本分布在后牙,動態實時導航組的此方面數據差異相對較小。這可能是由于后牙區數字化導板導航輔助種植的種植體精度易受導板厚度占用開口度空間的影響而導致后牙區植入時角度偏斜。本課題組前期研究對比上頜前牙及上頜第一磨牙行數字化導板導航輔助種植的種植體精度,發現上頜前牙組的角度偏差為(3.25 ±0.51)°,上頜第一磨牙組的角度偏差為(3.89 ±0.64)°,上頜前牙組的角度偏差較上頜第一磨牙組小,差異有統計學意義[17],與本研究結果相近,提示在數字化導板導航的應用過程中不能忽視導板的厚度對后牙區種植體精度影響。Block 等[5]也在動態導航種植和自由手精度對比研究中發現,動態導航種植中使用常規手術器械可用于第二磨牙區域和開口受限的患者,以減少下牙槽神經或種植體撞擊鄰近牙根的并發癥;該研究還提出與數字化導板導航相比,動態導航系統不需要特殊的鉆孔系統或手術器械,且因為種植醫師可以在監視器上看到手術,所以醫師可以保持良好的姿勢,降低醫師疲勞程度。綜上,數字化導板導航種植技術可盡量應用于開口度佳操作空間足的病例中,而難度較大操作空間受限的病例可適當選擇動態實時導航種植技術以減小后牙區種植體的角度偏差,減低后期種植修復和種植護理難度。
數字化導板導航的種植精確度不如動態實時導航,但數字化導板導航種植技術一次性投入較少,在基層臨床較易開展應用;動態實時導航系統具有微創、精準、安全、實時的優點,是未來數字化種植技術發展的方向。
【Author contributions】Zhao YQ processed the research and wrote the article. Liu AP processed the research and revised the article. Cen F reviewed the article. Yang KW and Li YF collected,processed and analyzed the data. Deng WZ designed the study and reviewed the arti?cle. All authors read and approved the final manuscript as submitted.
猜你喜歡
環球時報(2022-12-23)2022-12-23 09:28:37
昆明醫科大學學報(2022年1期)2022-02-28 07:45:04
中老年保健(2021年11期)2021-08-22 03:13:36
昆明醫科大學學報(2021年2期)2021-03-29 07:42:46
河北畫報(2020年10期)2020-11-26 07:20:50
小學閱讀指南·低年級版(2017年1期)2017-03-13 20:07:35
中國衛生標準管理(2015年3期)2016-01-14 03:41:47
中國醫療美容(2015年1期)2015-07-12 10:06:38
鄭州大學學報(醫學版)(2015年2期)2015-02-27 14:50:54
西南軍醫(2014年5期)2014-04-25 07:42:48