基于非對稱融合結構設計的空管自動化系統多監視源融合處理方案
2021-02-26 21:21:04張震亞馬正穎席楊
中國新通信 2021年21期
張震亞 馬正穎 席楊
引言:
近年來,隨著民航領域不斷引入廣播式自動相關監視系統(ADS-B)、廣域多點定位系統(MLAT)等新型監視手段,不同空管自動化系統現場引接的監視源信號結構逐漸向復雜化、非標準化發展,傳統的基于對稱融合結構的空管自動化系統航跡融合方案已逐漸不能滿足不同監視源信號引接情況的民航空管現場的實際使用需要。
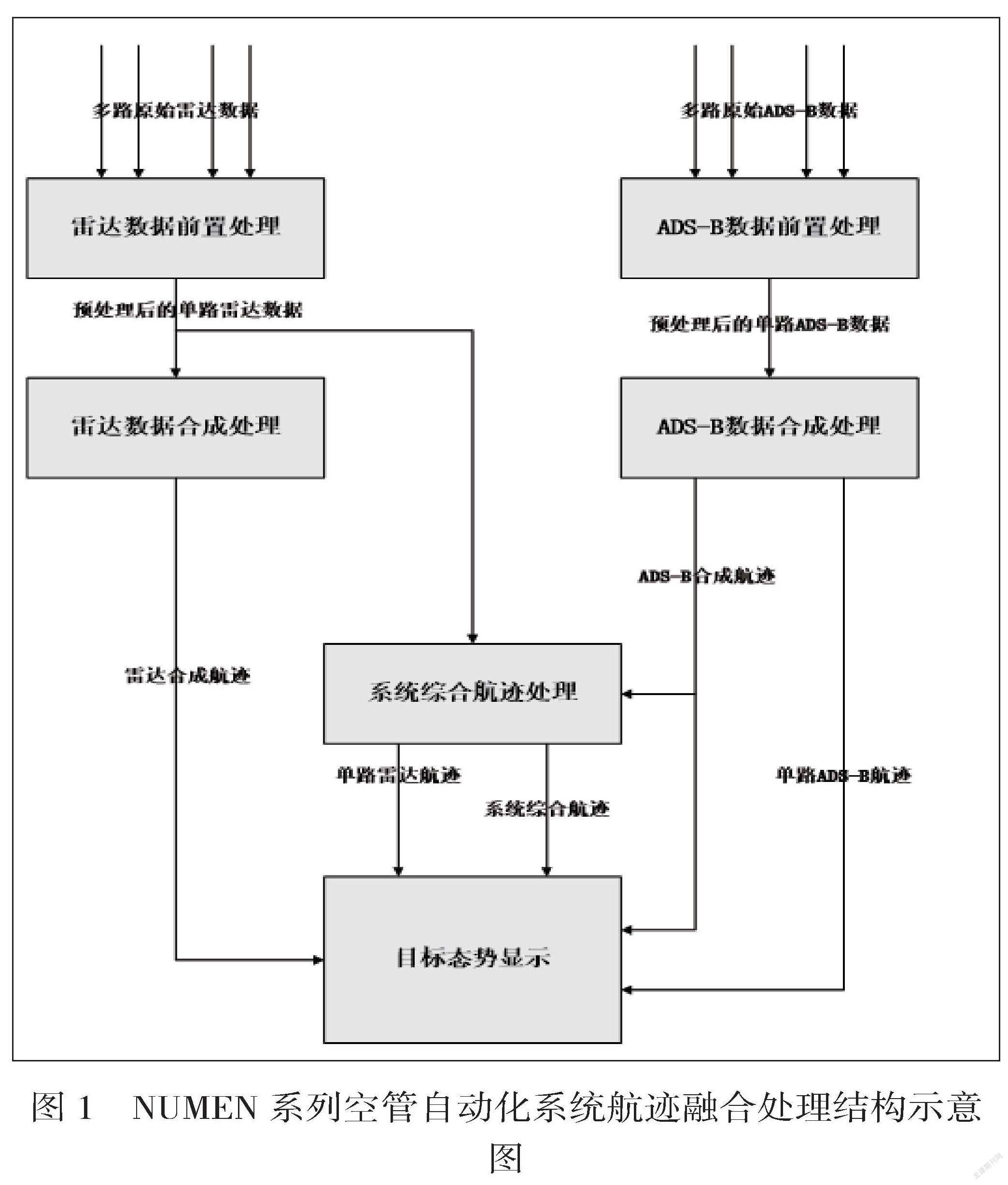
萊斯NUMEN系列空管自動化系統作為目前最新架構的空管自動化管制系統,具備成熟的、基于非對稱融合結構的空中目標監視源多路融合處理能力,在北京、上海、廣州、貴陽、長春、青島、長沙、杭州、南京、廈門、福州、汕頭、烏魯木齊、大連、沈陽、蘭州、西寧、南寧、昆明等全國各地區域的區管、大/中/小型機場等空管現場具有多年的穩定使用經驗,在滿足不同現場信號引接條件的同時,可持續為管制員提供滿足民航管制精度需求的綜合目標航跡。
本文結合NUMEN系列空管自動化系統的實際融合結構設計,對多監視源融合處理方案在民航空管自動化系統中的應用進行介紹和探討。
一、多類型監視源數據前置處理
目前民航領域建設的各廠家空管自動化系統通常支持多種類型監視數據的前置處理,包括一次/二次航管雷達、S模式雷達、廣播式自動相關監視系統(ADS-B)、廣域多點定位系統(MLAT)等。系統需要對多類型監視源數據進行前置預處理,完成監視源報送的原始信號數據格式解析和合法性檢查(包括CRC校驗、數據幀格式檢查、SAC/SIC檢查、時標檢查等),并依據監視源報告的質量指標過濾低質量不可信數據,為后續航跡融匯處理提供穩定統一的數據支撐。
通常來說,實際應用于民航場景的空管自動化現場一般以航管雷達和ADS-B信號為主要監視源。其中,航管雷達作為傳統的空中目標監視信號,其信號性能穩定,位置信息可靠,更新周期較長(通常為4~12秒)。ADS-B作為近年來快速發展的新型目標監視源,具有建設成本低,更新周期快(通常≤1秒),位置精度高(理論精度可到達米級甚至厘米級)等特征。然而,由于ADS-B報告的位置信息依賴于機載設備的定位結果(包括GPS定位系統、慣導定位系統等),其報送位置的整體可信度和均一度均低于基于統一觀測原理的航管雷達。故目前民航場景的各地管制現場往往將ADS-B作為航管雷達的輔助監視源進行補充使用[1]。
二、基于非對稱融合結構設計的監視源處理方案
根據實際民航用戶的管制范圍和現場硬件設施標間差異,空管自動化系統現場引接的信號源規模可少至僅為1~2部ADS-B信號,也可多至數十部航管雷達及數十部ADS-B信號。
對于常規引接多路航管雷達監視源及ADS-B監視源的空管自動化現場,傳統自動化系統的融合處理模塊往往采用對稱系統設計,將航管雷達與ADS-B數據同時分別進行二級融合后傳至一級模塊進行最終融合處理;或將原始數據直接傳至一級模塊進行最終融合處理。
以上的兩種對稱融合方案各自存在一定的固有缺陷,前者由于對更新周期較長的航管雷達數據進行了兩級融合處理,將引入無法忽視的二次處理延遲,從而導致最終融合得到的綜合航跡較原始航管雷達數據有較為明顯的時延損耗;后者為規避兩級融合帶來的處理時延,取消了二級融合模塊,在大型自動化系統現場引接信號源較多的情況下,往往給一級系統處理引入過大的處理負荷,對于整個自動化系統的穩定性帶來隱患。
考慮以上兩類對稱結構設計的固有缺陷,結合多年來各地空管自動化系統的實際使用經驗,近年來NUMEN系列空管自動化系統在進行航跡融合處理時通常采用非對稱結構設計,將新型監視源(ADS-B/MLAT)信號進行融合后得到的二級合成航跡與原始航管雷達數據并行送入一級模塊進行最終融合。
基于該非對稱融合結構設計的自動化系統融合方案,可有效避免航管雷達因二次融合造成的長時間信號延遲,并保留了航管雷達信號在參與最終融合處理中的橫向可選擇性,同時通過對ADS-B、MLAT等高頻率更新的新型監視源的網絡信號進行二級融合,以減輕一級融合模塊的處理負擔,降低監視源網絡信號數據風暴可能造成的一級融合模塊過載風險。
通過近年來各地實際現場實施情況來看,無論是僅引接少量ADS-B信號的中小型機場終端,還是同時引接多部航管雷達和ADS-B信號的區管/大型機場管制系統均可靈活使用該架構,符合當前民航空管系統設計的方向需求。系統融合航跡經過多次現場校飛測試驗證,其精度能夠滿足現場管制運行的要求。
三、基于自適應場景FAHP的航跡融合處理算法
基于多年來各地空管現場實施經驗及使用經驗,NUMEN系列空管自動化系統形成了一套獨有的,基于自適應場景模糊層次分析法(Fuzzy Analytic Hierarchy Process,FAHP)的航跡融合處理算法,以實現較國內外傳統空管自動化系統[2]適應性更強,靈活度更高的航跡融合處理效果。
NUMEN系列空管自動化系統在融合判定中,自動調整航空器各判斷因素在不同場景下對于最終結果的影響權重,根據各類實際航空器的飛行場景采用自適應的融合門限窗口設計。例如對于目標之間的距離因素,系統設計有“≤1KM”/“ ≤1.5KM”/“ ≤5KM”/“ ≤7KM”/“ ≤15KM”/“ ≥15KM”等多種門限窗口,根據航空器實時所處的不同空域、高度、速度情況,自適應選取恰當的位置門限參數。在不同的條件場景組合情況下,如高空ADS-B信號與航管雷達信號融合,低空航管雷達與航管雷達融合、低空ADS-B信號與MLAT信號融合等情況,系統會自動切換不同的融合判斷處理流程,并相應調整各判斷因素的融合權重,進而得出不同的結論,實現最終融合效果在多場景下自適應模糊匹配。
例如,針對位于近場附近區域的起降航空器,其空間判斷因素(距離/高度/速度等)差異很小,系統將自動增大二次代碼/地址碼等固有身份因素的判斷權重,盡可能防止近距離起降目標或場面目標發生錯誤融合情況;位于ACC區域的高空目標,航空器固有身份因素(二次代碼/地址碼等)的影響權重將自動降低,系統將綜合考慮空間判斷因素(距離/高度/速度等)的差異情況,防止因二次代碼/地址碼等身份信息沖突情況造成的目標錯誤融合。
四、可靈活調整的系統特殊融合處理區域
在多場景自適應模糊匹配的基礎上,NUMEN系列空管自動化系統支持通過數據庫DBMS工具圖形化界面對于不同類型的各個信號源進行特殊的單監視源處理區域設置。可供設置的特殊處理區域包括但不限于:監視源生效區、監視源丟失區、監視源初始航跡抑制區、監視源融合優先級區、監視源不信任區等。
4.1監視源生效區
該區域用于限制單路監視源的生效范圍,通常包含監視源的理論有效覆蓋半徑。系統對區域以外報告的單監視源航跡直接進行丟棄處理。
4.2監視源丟失區
該區域用于剔除單路監視源的無效區域,通常包含監視源的理論盲區。系統對區域內部報告的單監視源航跡直接進行丟棄處理。
4.3監視源初始航跡抑制區
該區域用于剔除單路監視源的假目標頻發的敏感區域,系統對區域內部新生成的單監視源航跡直接進行抑制處理,但對從外部經過的單監視源航跡不做任何抑制處理。
4.4監視源融合優先級區
該區域用于多監視源優選處理。當某一航跡可被多路監視源進行跟蹤時,利用該區域可調節不同監視源報告的單路航跡信息在最終的融合航跡中貢獻成分的優先級比重。
4.5監視源不信任區
該區域用于低質量監視源剔除處理。當某一航跡可被多路監視源進行跟蹤時,利用該區域可在多路監視源航跡中自動剔除已經明確為低質量的單監視源航跡信息;若某一目標無法被多路監視源冗余覆蓋監視,只能被一路不信任區內的單監視源發現并進行跟蹤時,則系統不再進行任何剔除處理。
根據各地空管自動化系統現場用戶多年使用反饋,通過各類特殊處理區域的設置,廠家技術人員及用戶均能夠方便快捷地修改各監視源在不同空域范圍內對系統最終融合航跡的影響效果,以實現現場信號源的最大化可靠利用,減少低質量信號源對最終融合跡的不良干擾。在現場某一監視源出現偶發性故障或監視源性能變化等特殊情況時,也可以方便地由現場用戶臨時調整航跡融合效果,保證現場綜合航跡隨時具備穩定可用的精度與可靠性。
五、結束語
基于國內外多個空管現場用戶的多年使用反饋體驗,經過各現場每年進行的航跡融合精度校飛測試結果驗證,NUMEN系列空管自動化系統的航跡融合處理設計結構符合當前民航空管自動化系統發展方向,可提供滿足區管、大/中/小型機場、塔臺/機坪管制等各類不同用戶需求的高精度系統融合航跡,為管制現場的空中交通飛行安全保障提供可靠指導依據。所提供的穩定可靠的航空器目標航跡將進一步為自動化系統各類衍生功能,如安全告警功能、航空器4D軌跡運算功能等提供數據基礎,為提高運行現場空中交通管制效率提供可靠的參考依據。
參? 考? 文? 獻
[1]肖玉,成捷,賀姿.多雷達與ADS-B數據融合處理方法的研究與優化[J].數字技術與應用,2018,36(08):42-43.
[2]陽宇.多源相關監視雷達數據融合研究[D].電子科技大學,2012.
猜你喜歡
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
現代出版(2020年3期)2020-06-20 07:10:34
電子制作(2018年11期)2018-08-04 03:25:42
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
