磨輥堆焊修復路徑規劃
2021-02-08 13:31:26周奧博王微偉王喜臨劉愛國
機械制造文摘·焊接分冊 2021年6期
周奧博 王微偉 王喜臨 劉愛國

摘要:在等高型和等面積型焊縫填充策略的基礎上,提出了改進的磨輥堆焊焊縫填充策略,進行了磨輥堆焊焊道路徑規劃;在磨輥待焊區域焊道排布結果的基礎上,通過對堆焊系統機械結構的分析,推導出了路徑規劃的焊接目標點公式與每一目標點所對應的磨輥轉軸轉動角度,以及焊接機械臂轉動角度,并進行了焊接機械臂末端的運動學仿真。結果表明,所提出的焊縫填充策略和堆焊路徑規劃方案可以保證機械臂平滑穩定的地到達路徑規劃后的任意一點,機械臂可以穩定地啟動和停止。焊縫填充策略合理,堆焊路徑規劃方案正確。
關鍵詞:焊接路徑規劃;焊接機械臂;聯動機構;軟件仿真;多層多道焊
中圖分類號:TG 409
Abstract:Based on the equal-height and equal-area weld filling strategies, an improved grinding roll surfacing weld filling strategy was proposed, and the path planning of the grinding roll surfacing weld bead was carried out. On the basis of the result of welding pass arrangement in the area to be welded by grinding roller, the welding target point formula of the path planning and the rotation angle of the grinding roller shaft corresponding to each target point, as well as rotation angle of welding robot arm, were deduced through the analysis of the mechanical structure of surfacing system, and the kinematics simulation of the end of the welding robot arm was carried out. The results showed that the proposed weld filling strategy and surfacing path planning scheme could ensure that the robotic arm reached any point after the path planning smoothly and stably, and the robotic arm could start and stop stably. The weld filling strategy was reasonable, and the surfacing welding path planning scheme was correct.
Key words:welding path planning;welding robot arm;link gear;simulation software;multi-layer and multi-pass welding
0 前言
20世紀60年代以來,為提高能源利用率,越來越多的火力發電廠采用中速磨煤機[1-2]ADDINNE.Ref.{966E3546-8DE0-49E1-B8FD-D7E87A891E83}作為制粉系統的磨煤工具。中國出產的煤種類繁多、雜質含量高、可磨性非常差,再加上工人經驗不足,導致磨煤機磨輥、磨盤過快地磨損。為了降低生產成本,采用焊補的方式對磨損缺口進行修復。目前國內大多數發電廠主要依靠于人工焊補。但是人工焊補存在著許多問題例如效率低、焊接質量差、工作環境差以及弧光污染、粉塵污染對工人健康的影響等。采用智能焊接機器人進行焊補是解決該問題的有效方法。對于不規則的磨輥磨損缺口,焊道的路徑規劃是開發磨輥磨損缺口智能修復系統要面對的首要問題。現階段,大型結構件的焊道路徑規劃[3-5]ADDINNE.Ref.{7CECF95D-A26F-45A8-B6AD-CA23AE605A21}應用于規則的焊接坡口,如V形坡口、單邊V形坡口或者在平面上進行焊道路徑規劃堆焊的增材制造技術。中厚深度的結構件焊縫填充策略一般有3種:①等高型焊縫填充策略[6-7]ADDINNE.Ref.{8B5FDA07-BCF2-4AC5-BF7D-7F1FE175A53C},每一層高度相同,且遵循焊道數目與所在層數相等的原則,由于焊接面積不同,需要在焊接過程中頻繁改變焊接工藝參數,導致精度上難以控制;②等面積焊道填充策略[8]ADDINNE.Ref.{CC5541E1-76A3-48C4-B1C3-2B6DA00C681D}在保證每一層所具有的焊道數與層數相等的前提下每一條焊道的截面積相同,此方法雖然焊接參數相同,但焊道的路徑規劃更加復雜;③自定義型填充策略[9-13]ADDINNE.Ref.{FE58E185-BAC4-4861-BD07-E5450311AE70},首先在離線規劃系統中設置焊道的焊接工藝參數、焊接順序、規劃類型等,系統再利用這些信息自動規劃焊接路徑和姿態,從而進行焊道排布。由于磨輥堆焊修復缺口較大,而且是在不規則凹陷區域進行堆焊,所以無法遵從每一層焊道數與層數相等的原則,無法利用現有的填充策略實現焊道路徑規劃。
文中在等高型和等面積型焊縫填充策略的基礎上自定義焊縫填充策略,進行磨輥堆焊修復路徑規劃研究。并且利用由三軸焊接機械臂和可自轉、可繞轉軸轉動的磨輥所組成的堆焊系統,進行路徑規劃結果的運動控制。
1 焊縫填充策略
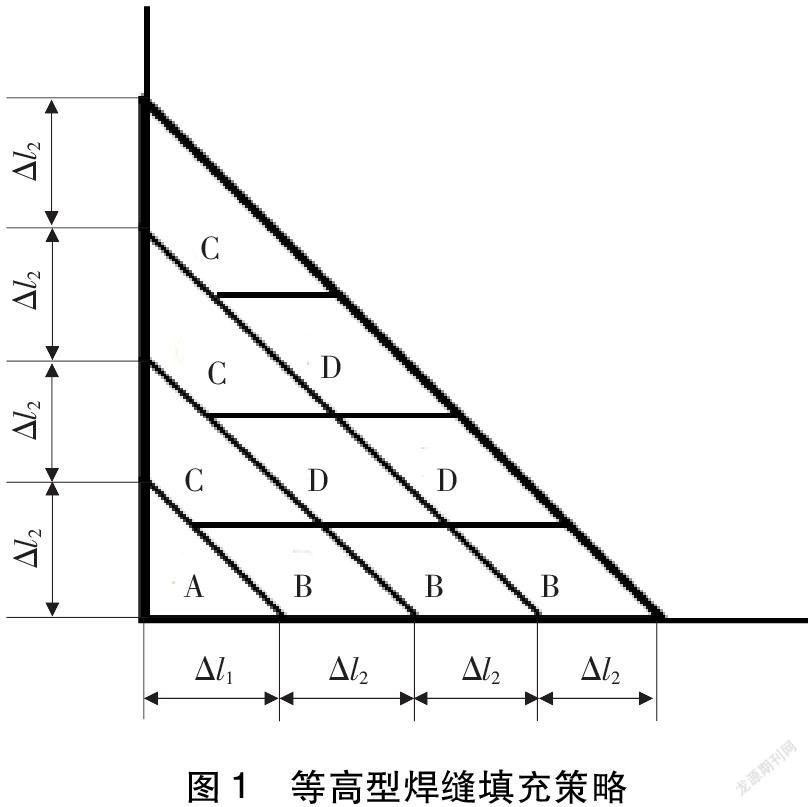
結合目前焊接路徑規劃資料及實際生產需要,文中在等高型(圖1)和等面積型焊縫填充策略的基礎上自定義焊縫填充策略:每一層焊接高度與焊道長度不變,即單條焊道的余高與路徑規劃中任意兩焊接目標點的距離不變,在焊接工藝參數不變的前提下,每一層的焊道數目由填充焊道長度、截面積和缺口每層底邊長度、每層面積確定。
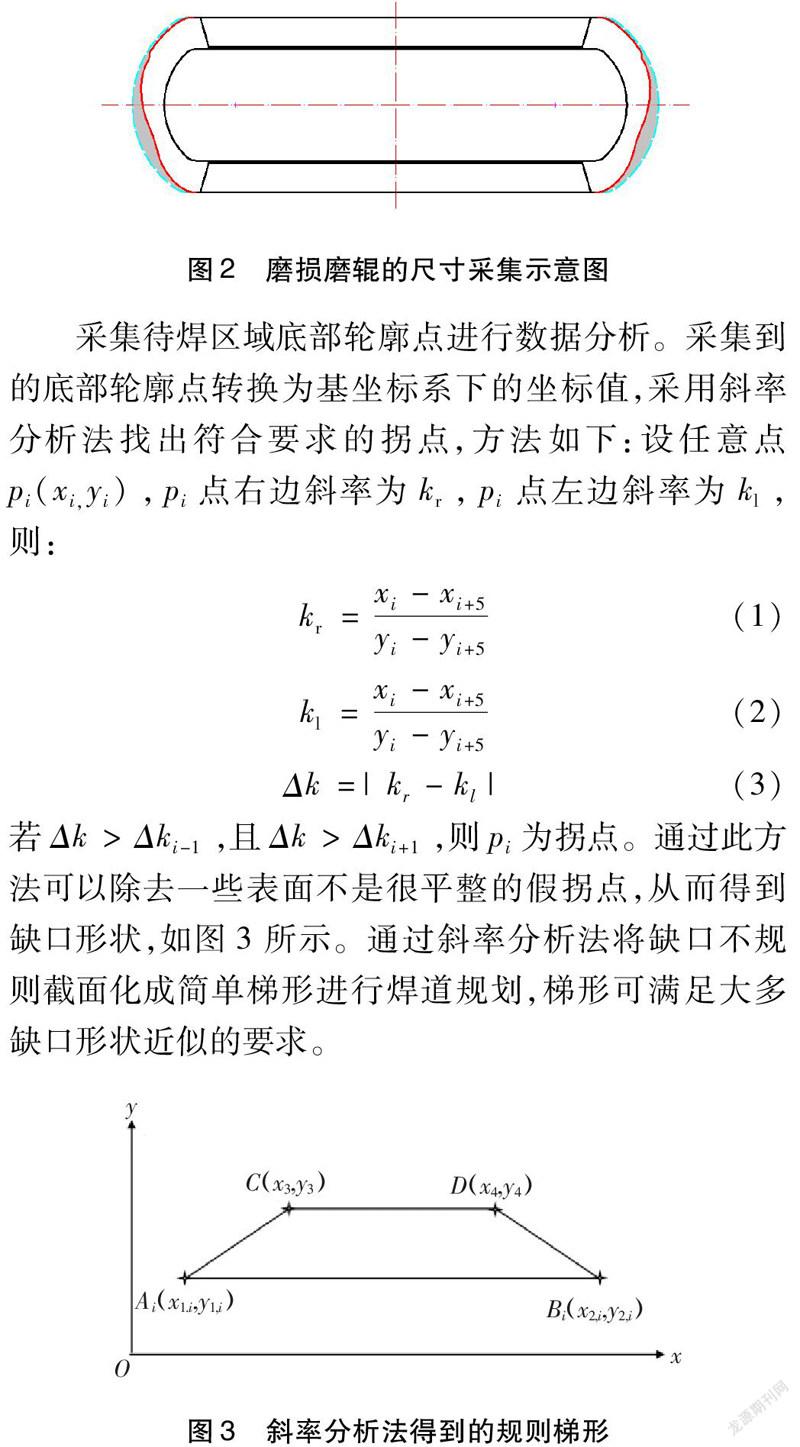
采用激光掃描、圖像處理或接觸測量等方法得到磨損磨輥的外部輪廓,再將其尺寸與完整磨輥的尺寸進行對比,得到待焊區域如圖2所示,實線線條為磨損磨輥的外部輪廓,虛線線條為完整磨輥外輪廓,填充部分為磨輥缺口待焊區域。
采集待焊區域底部輪廓點進行數據分析。采集到的底部輪廓點轉換為基坐標系下的坐標值,采用斜率分析法找出符合要求的拐點,方法如下:設任意點pi(xi,yi),pi點右邊斜率為kr,pi點左邊斜率為kl,則:
若Δk>Δki-1,且Δk>Δki+1,則pi為拐點。通過此方法可以除去一些表面不是很平整的假拐點,從而得到缺口形狀,如圖3所示。通過斜率分析法將缺口不規則截面化成簡單梯形進行焊道規劃,梯形可滿足大多缺口形狀近似的要求。
在等高型和等面積型焊縫填充策略的基礎上找出了適合磨輥堆焊修復的焊縫填充策略。每一層焊道高度一致,焊腳增長量l不變,經計算得出的每層焊道數目作為堆焊一層結束的判斷依據。為保證計算結果更加準確,從而更好地修復缺損口,每焊完一層便會重新測量數據。
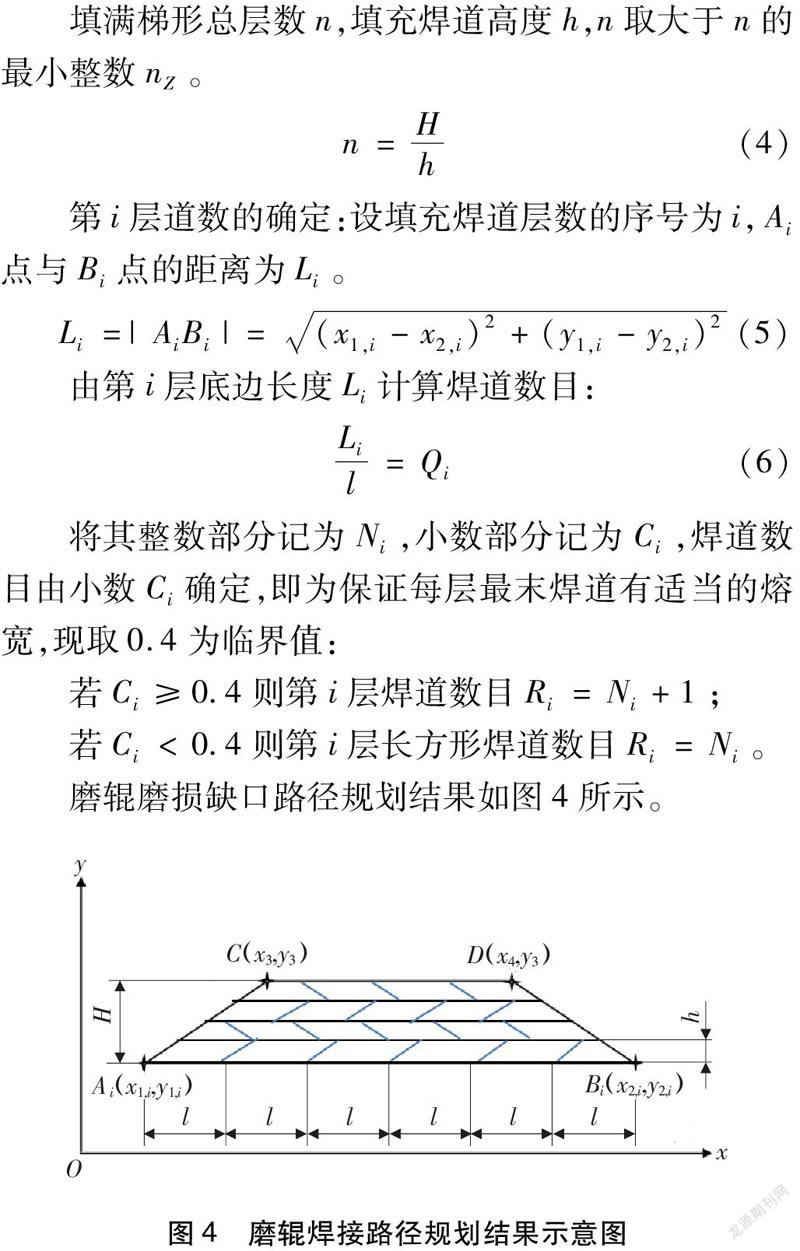
焊道層數的確定:梯形的高度為H,每條填充焊道的長度為l,余高為h。
填滿梯形總層數n,填充焊道高度h,n取大于n的最小整數nZ。
第i層道數的確定:設填充焊道層數的序號為i,Ai點與Bi點的距離為Li。
由第i層底邊長度Li計算焊道數目:
將其整數部分記為Ni,小數部分記為Ci,焊道數目由小數Ci確定,即為保證每層最末焊道有適當的熔寬,現取0.4為臨界值:
若Ci≥0.4則第i層焊道數目Ri=Ni+1;
若Ci<0.4則第i層長方形焊道數目Ri=Ni。
磨輥磨損缺口路徑規劃結果如圖4所示。
2 聯動機構公式
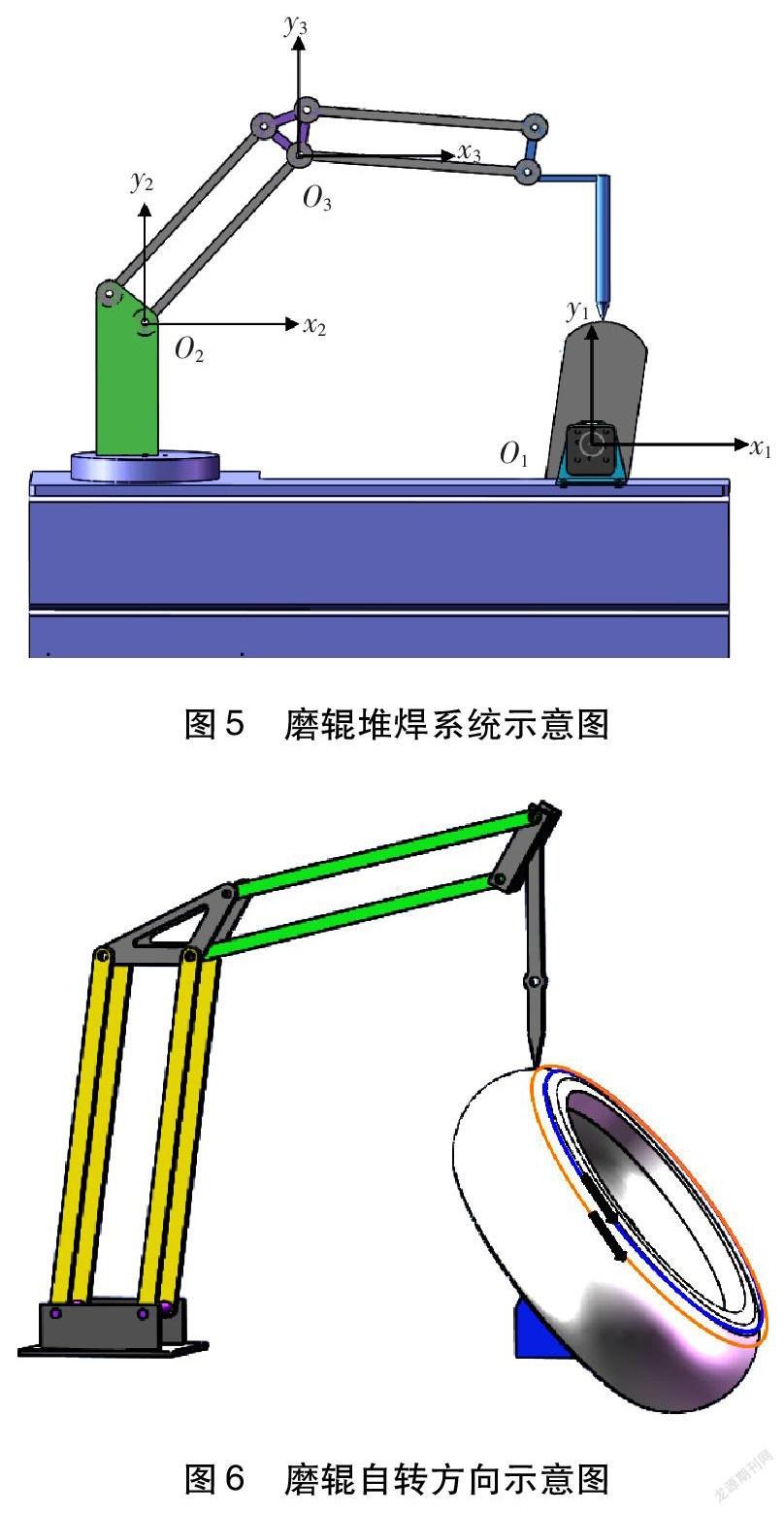
如圖5所示,磨輥堆焊智能修復采用的焊接機器人為三自由度焊接機器人,由三軸焊接機械臂和可自轉、可繞第一軸O1轉動的磨輥組成。磨輥自轉方向如圖6所示。磨輥堆焊智能修復的機械運動問題屬于焊接機器人機構與磨輥機構的聯動問題,磨輥的第一軸O1要與焊接機器人的第二軸O2和第三軸O3同時運動,共同完成堆焊軌跡運動。一旦目標點確定,需要同時計算三個軸所轉角度,并轉換成脈沖數,發送給控制轉軸的兩相進步電機。
2.1 機械臂轉軸公式推導
磨輥堆焊機器人[14]為三自由度焊接機器人小臂執行端(焊槍)垂直向下90°。采用D-H法建模,建立連桿坐標系,此方法可以將三維轉換為二維,消除某一軸上的變量,達到簡化坐標公式的目的。并且在此過程中加入齊次變換規則。具體方法如下所述。
坐標系0:取第一關節軸線與第二關節軸線的公垂線在一軸上的交點,且在第一軸中心為坐標系0的原點,關節軸線方向為y0軸的方向,如圖3所示,x0軸方向為第一關節軸線與第二關節軸線的公垂線,由原點指向第二關節軸,z0軸由右手定則確定。
坐標系1到坐標系3遵循取關節軸線i與i+1的公垂線在i的交點為坐標系i的原點,zi軸方向為關節軸線方向,xi軸方向為第i關節軸線與第i+1關節軸線的公垂線,由原點指向第i+1關節軸,yi軸由右手定則確定。
根據上述模式用下列旋轉和位移,可以建立相鄰坐標系關系[15]:
式中:i-1Ai為描述坐標系i相對于坐標系i-1的變換;θi為描述連桿繞zi軸轉動角度;αi為描述連桿繞xi軸轉動角度;li為描述連桿長度;di為描述同一坐標原點移動的距離。
三自由度焊接機器人的連桿關系見表1。
將表1連桿坐標系的相關變量代入變換矩陣i-1Ai中,分別求得坐標系i相對于坐標系i-1的變換矩陣,再根據末端執行器T3矩陣與A矩陣的關系聯立求解θ2,θ3,T3矩陣與A矩陣的關系如下:
由上述過程可以計算出到達任意目標點三自由度焊接機器人每軸所轉角度,轉換成脈沖數發送給兩相步進電機。
2.2 目標點公式推導
焊接機器人機構給定目標點,求第二軸O2、第三軸O3轉動角度的公式已推出,下面進行第一軸O1轉動角度的推理和目標坐標點的確定。
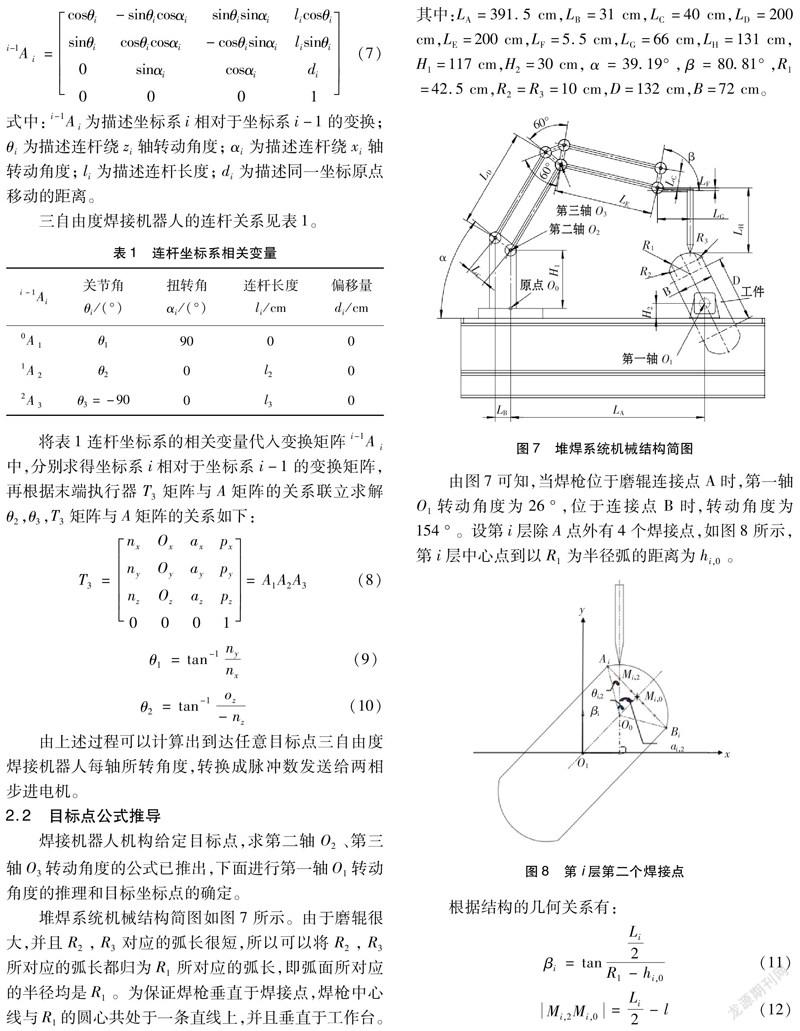
堆焊系統機械結構簡圖如圖7所示。由于磨輥很大,并且R2,R3對應的弧長很短,所以可以將R2,R3所對應的弧長都歸為R1所對應的弧長,即弧面所對應的半徑均是R1。為保證焊槍垂直于焊接點,焊槍中心線與R1的圓心共處于一條直線上,并且垂直于工作臺。其中:LA=391.5 cm,LB=31 cm,LC=40 cm,LD=200 cm,LE=200 cm,LF=5.5 cm,LG=66 cm,LH=131 cm,H1=117 cm,H2=30 cm,α=39.19°,β=80.81°,R1=42.5 cm,R2=R3=10 cm,D=132 cm,B=72 cm。
由圖7可知,當焊槍位于磨輥連接點A時,第一軸O1轉動角度為26°,位于連接點B時,轉動角度為154°。設第i層除A點外有4個焊接點,如圖8所示,第i層中心點到以R1為半徑弧的距離為hi,0。
根據結構的幾何關系有:
式中:Mi,0為AiBi的中心點;Mi,2為第i層第二個焊接點;βi為第i層∠AiO0Mi,0的角度;αi,2為∠Mi,2O0Mi,0的角度;θi,2為∠AiO0Mi,2的角度。由相似三角形關系,可得第i層第二點的坐標Mi,2如式(17)所示;剩余3個焊接點重復式(10)~式(15),經分析推理得到任意點坐標Mi,j(i≥表示第i層;j>1表示第j個焊接起始點)如式(18)所示。
2.3 磨輥轉軸公式推導
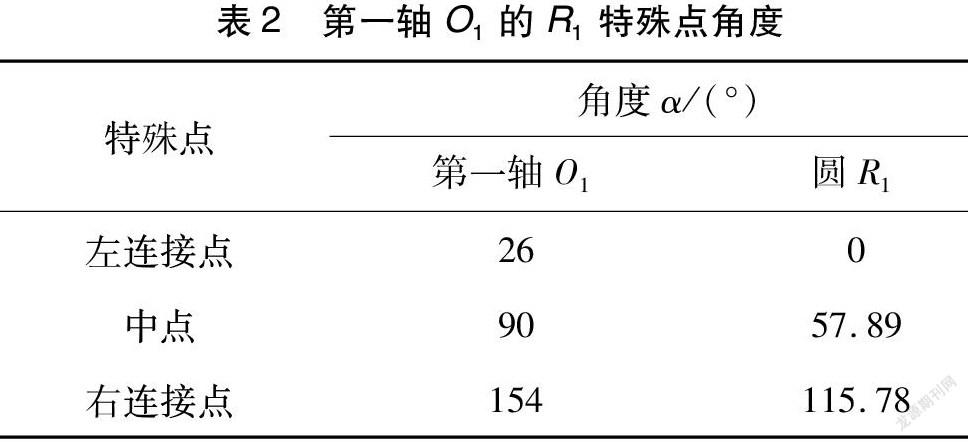
任意坐標點與第一軸轉動角度的關系可由表2推出。
設堆焊系統機械結構的焊槍初始位置左連接點到中點此時R1的圓所對的圓心角為57.89°,第i層最初起始點A到中點此時R1的圓所對的圓心角為βi,則左連接點到第i層最初起始點A此時的圓所對的圓心角為(57.89-βi)°。根據表2里對應的比例關系,從左連接點開始到目標點與R1圓心延長線在圓弧上的交點,焊槍軌跡所對應的弧長,其R1的圓心角每增加1°第一軸轉動角度增加1.11°,如從左連接點到A點半徑R1的圓所對的圓心角為(57.89-βi)°,則第一軸共轉了[1.11*(57.89-βi)+26]°。
3 仿真模擬分析
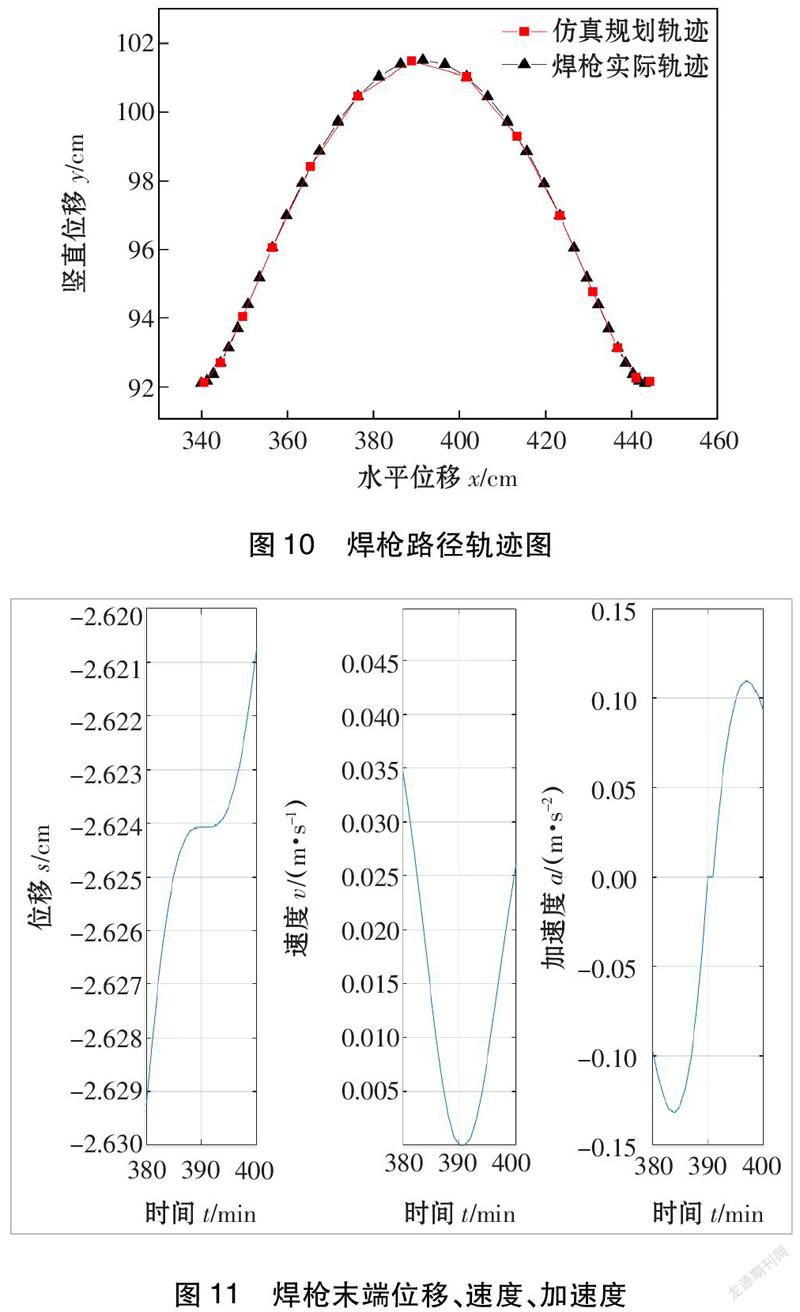
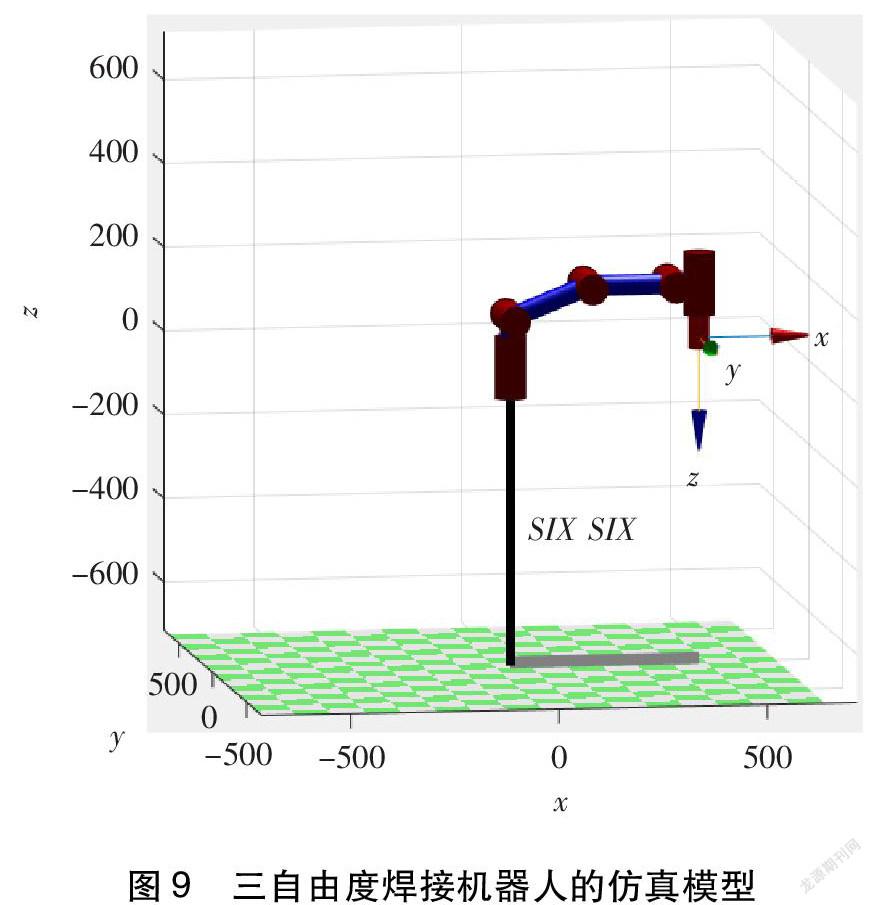
為驗證磨輥堆修復路徑規劃的可行性,基于MATLAB軟件對規劃好的路徑進行仿真模擬[16-17],模擬出堆焊路徑。首先,根據D-H法和輥套堆焊結構建模,設置關節角度、關節距離、連桿長度、連桿轉角、關節類型等,建立三自由度焊接機器人的仿真模型,如圖9所示。然后,輸入測量變量A,B,C,D 4點及單條填充焊道長度和高度,畫出預計修補范圍,并計算限制條件焊接層數與每層焊接道數。接著輸入第i層初始測量點和,即可得到焊接路徑仿真規劃軌跡及焊槍在任意兩點之間的位移、速度、加速度變化曲線,如圖10和圖11所示。圖10是焊槍仿真軌跡和由實際測量焊槍在磨輥磨損缺口位置數據繪制的軌跡對比圖。由于磨輥尺寸、測量誤差及計算時的精確度導致兩軌跡圖不能完全重合,但兩圖走勢規律一致并且只有少數未重合點說明該路徑規劃推理是正確的。由圖11可知,機械臂從任意中間點A到下一點的過程中,焊槍末端位移曲線平滑無奇異點說明機械臂可穩定地實現空間運動,并且A點處的速度、加速度從零開始,B點處的速度、加速度減至為零,說明機械臂可以穩定地啟動和停止,進一步說明了文中路徑規劃推理的正確性。
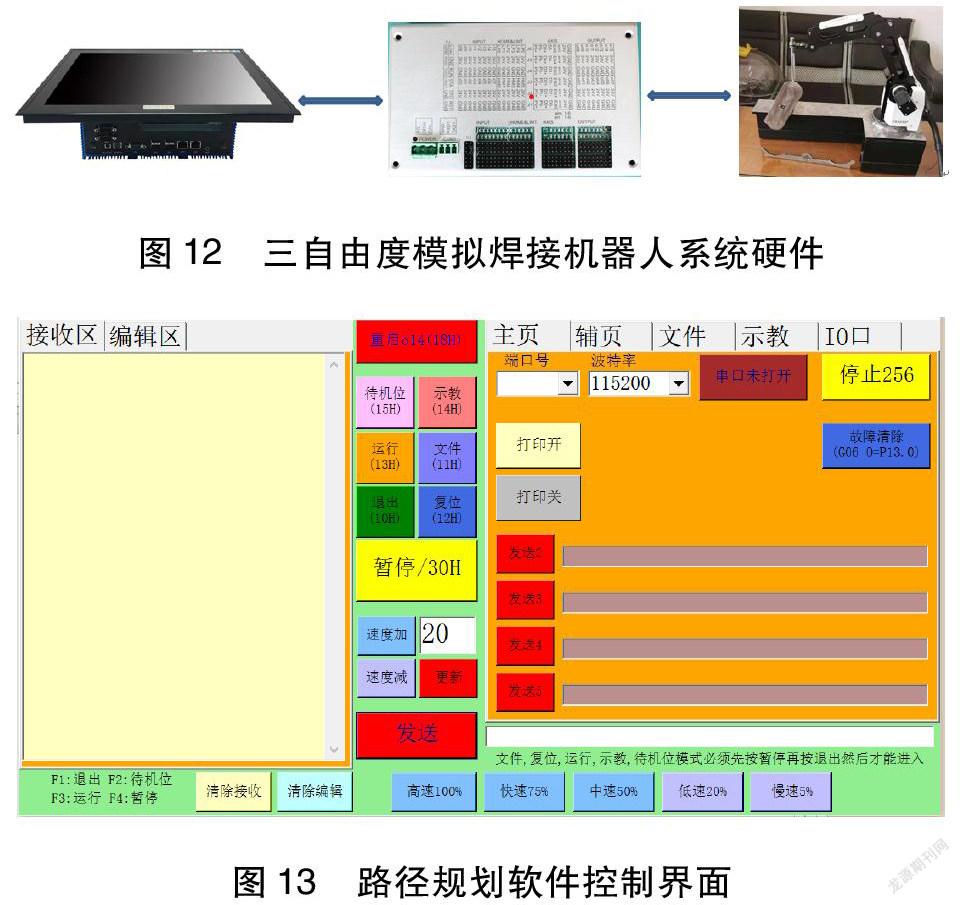
為驗證路徑規劃算法及仿真試驗的合理性,基于堆焊系統機械結構搭建了三自由度模擬焊接機器人系統:硬件包括三自由度焊接機器人、控制器、上位機如圖12所示,軟件包括基于C#語言和上述推理得到的路徑規劃算法所開發的自動規劃焊道路徑軟件如圖13所示。在模擬焊接機器人系統中輸入與仿真系統的相同坐標值和變量參數,利用上位機控制軟件的暫停繼續功能進行模擬的實際焊接軌跡的位置測量,得到的實際焊接軌跡如圖10所示。
4 結論
在等高型和等面積型焊縫填充策略的基礎上提出了改進的磨輥堆焊焊縫填充策略,進行了磨輥堆焊焊道路徑規劃,并進行了焊接機械臂末端的運動學仿真。仿真結果證實了焊道路徑規劃的合理性,機械臂可以平滑穩定地到達路徑規劃后的任意一點,機械臂可以穩定地啟動和停止。
參考文獻
[1] 叢相州, 徐德錄, 陳玉成. 中速磨煤機磨盤裂紋的焊接修復[J]. 焊接, 2005(10):70-71.
[2] 李振英, 戴麗萍, 侯明, 等. 磨輥明弧堆焊系統自動控制方法[J]. 焊接學報, 2008, 29(4):82-84.
[3] 溫永策.厚板機器人多層多道焊接路徑規劃研究[D]. 濟南:山東大學碩士學位論文, 2019.
[4] 倪沫楠, 王天琪, 李金鐘. 基于特定平面的單目視覺焊縫起始點導引[J]. 焊接, 2018(5):12-15, 20.
[5] 倪沫楠. 弧焊機器人多層多道激光視覺焊縫跟蹤技術研究[D]. 天津:天津工業大學碩士學位論文, 2019.
[6] Li R, Wang T, Wang C, et al. A study of narrow gap laser welding for thick plates using the multi-layer and multi-pass method[J]. Optics & Laser Technology, 2014, 64:172-183.
[7] Hiramoto S, Moriyasu M, Ohmine M. Development of a multipass welding program for arc welding robots and its application to heavy electrical components[J]. Welding International, 1992, 6(1):26-31.
[8] Wahba M, Mizutani M, Katayama S. Single pass hybrid laser-arc welding of 25 mm thick square groove butt joints[J]. Materials & Design, 2016, 97:1-6.
[9] 張華軍, 張廣軍, 王俊恒, 等. 低合金高強鋼雙面雙弧焊熱循環對組織性能的影響[J]. 焊接學報, 2007, 28(10):81-84.
[10] Zhang Huajun, Zhang Guangjun, Zhang Xiulan, et al. Three dimension simulation analysis of the interpass stress and deformation during multipass welding[J]. China Welding, 2008, 17(2):72-78.
[11] 張華軍. 大厚板高強鋼雙面雙弧焊新工藝及機器人自動化焊接技術[D]. 哈爾濱:哈爾濱工業大學博士學位論文, 2009.
[12] 章銳. 基于MotoSimEG-VRC的機器人中厚板多層多道焊試驗研究[D].武漢:武漢理工大學碩士學位論文, 2020.
[13] 成利強, 王天琪, 侯仰強, 等. 中厚板V形坡口多層多道焊機器人焊接技術研究[J]. 焊接, 2018(2):10-13.
[14] 段晨旭. 基于機器人的電弧增材再制造路徑規劃研究[D].成都:西華大學碩士學位論文, 2019.
[15] 王晨. 篤斯越桔采摘機械手機構設計運動學分析[D].哈爾濱:東北林業大學碩士學位論文, 2008.
[16] 李慨, 戴士杰, 孫立新, 等. 機器人焊接大型接頭多道焊填充策略[J]. 焊接學報, 2001, 22(2):46-48.
[17] 夏偉, 吳玉文. 基于MATLAB Robtics Toolbox的機械臂軌跡仿真研究[J]. 河南科技, 2020(4):54-56.