改進的滑模觀測器實現(xiàn)PMSM無傳感器控制
2021-02-05 09:51:58張鑫張傳金
電氣傳動 2021年3期
張鑫,張傳金
(1.江蘇聯(lián)合職業(yè)技術學院 南京工程分院,江蘇 南京 211135;2.江蘇建筑職業(yè)技術學院 智能制造學院,江蘇 徐州 221116)
無傳感器控制技術增強了電機驅(qū)動系統(tǒng)的可靠性,且具有低成本、免維護、環(huán)境適應性強等優(yōu)勢,因而備受國內(nèi)外學者及工業(yè)界關注。目前,該技術已在風機、泵、電動汽車、家電、工業(yè)機床等領域取得了一定應用[1-4]。無位置控制的實現(xiàn)策略可分為零低速域信號注入法和中高速域模型法。模型法中滑模觀測器(sliding mode observer,SMO)因具有對參數(shù)變化不敏感、強魯棒性等優(yōu)良特性,得到廣泛的研究與應用。其中,一階滑模觀測器因結(jié)構(gòu)簡單、便于設計,得到了實質(zhì)性應用。而基于一階SMO的無位置控制系統(tǒng)中,用于減小顫振的低通濾波器(low-pass filter,LPF)給反電動勢(electromotive force,EMF)提取帶來了相位延遲與幅值衰減的問題,故常需要相位補償環(huán)節(jié)[5]。而隨著轉(zhuǎn)速的降低,補償環(huán)節(jié)的補償作用變差,位置誤差亦增大,帶載能力大大下降。此外,現(xiàn)場應用中,“恰好”的補償系數(shù)不易得到,調(diào)試難度較大。
針對該問題,本文提出用自適應復數(shù)濾波器(self-adapting complex-coefficient filter,SACCF)替代LPF的無位置控制實現(xiàn)方法,簡寫為SACCFSMO。目前,復數(shù)濾波器在同步并網(wǎng)、正負序分量分離[6-9]及電網(wǎng)阻抗估算[10]中取得了一定應用。其在中心頻率處具有無相位延遲、無幅值衰減的優(yōu)異特性[6],使之特別適用于反電動勢的提取。與估計轉(zhuǎn)速相關的自適應律使得復數(shù)濾波器能在較寬速域內(nèi)實現(xiàn)對反電動勢的精確提取,且在整個速域內(nèi)具有相當?shù)念澱袼健W赃m應復數(shù)濾波器的引入從根本上剔除了補償環(huán)節(jié),位置誤差不再隨轉(zhuǎn)速降低而增大,系統(tǒng)帶載能力得到提升。仿真和實驗結(jié)果驗證了所提策略的有效性和可行性。
1 PMSM擴展反電動勢模型
d-q坐標系下,永磁同步電機(PMSM)的數(shù)學模型可寫

其中

式中:ud,id,Ld,uq,iq,Lq分別為d,q軸電壓、電流及電感;Ψf,Rs分別為永磁體磁鏈與定子電阻;ωe為電機電角速度;p為微分算子。
將式(1)變換到靜止α-β坐標系下,可得:
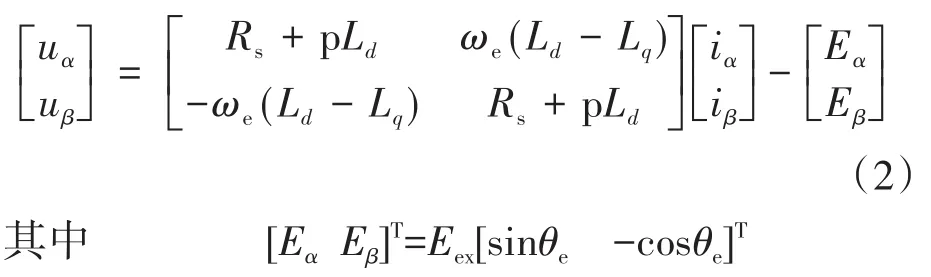
由式(2)易知,若能精確地得到Eα,Eβ,則轉(zhuǎn)子位置θe可直接計算或通過位置估計器得到。
2 SACCF-SMO設計
圖1為SACCF-SMO實現(xiàn)永磁同步電機無位置控制系統(tǒng)框圖。圖1中,由于SACCF能無相位延遲地濾波得到估計反電動勢,故系統(tǒng)不再需要相位補償環(huán)節(jié)。估計轉(zhuǎn)速反饋至SACCF,用于中心頻率與截止頻率的自動調(diào)節(jié)。

圖1 SACCF-SMO實現(xiàn)PMSM無位置控制系統(tǒng)框圖Fig.1 The block diagram of PMSM sensorless control system based on SACCF-SMO
2.1 滑模觀測器設計
預設滑模面為

根據(jù)式(2),可建立基于電流誤差的滑模觀測器為

式中:k為滑模增益。
式(2)減去式(4)得到電流誤差方程為
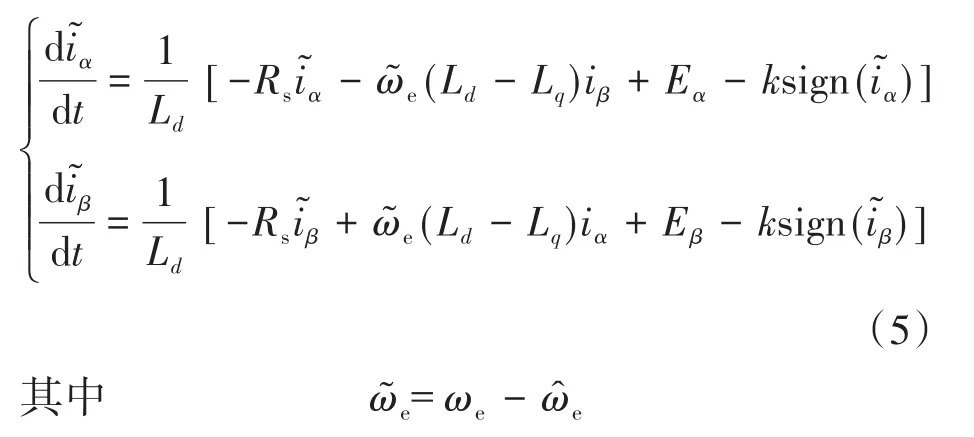

滑模觀測器的到達條件為

以α軸為例,簡要推導其穩(wěn)定性判據(jù)。將式(5)代入式(7),可得:

同理,β軸也可得到類似表達式;且考慮到,當下式成立時,滑模觀測器是穩(wěn)定的[11-13]:

式(9)可作為選取滑模增益的依據(jù)。
2.2 SACCF及其參數(shù)選取

式中:ωr,ωc分別為中心頻率與截止頻率。
圖2所示為ωr分別為700 r/min(ωr1)和 2 500 r/min(ωr2)時,不同截止頻率下,式(10)的 Bode圖。由圖2易知,復數(shù)濾波器在中心頻率處,不存在幅值衰減與相位延遲,特別適用于此處的提取。

圖2 不同截止頻率下,SACCF的Bode圖Fig.2 The Bode diagram of SACCF with different ωcvalues
根據(jù)圖1與式(10)可得:


式中:Zα,Zβ為未經(jīng)處理的Eα,Eβ直接估計值,含有大量諧波。
電機運行中,反電動勢的頻率隨著轉(zhuǎn)速而變化。為了準確地提取出反電動勢,式(12)中的中心頻率與截止頻率應隨著轉(zhuǎn)速而自動調(diào)節(jié)。為此,本文假設中心頻率與截止頻率與估計轉(zhuǎn)速存在如下線性關系:

式中:ksa為自適應系數(shù)。
為探究ksa取值大小與CCF濾波效果的關系,將式(13)代入CCF的幅頻、相頻表達式,得到下式:
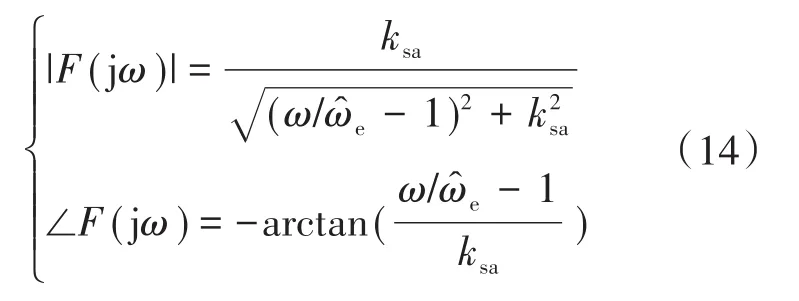
由式(14)繪出不同ksa時,CCF的Bode圖,見圖2。觀察曲線的變化趨勢,易知:ksa越小,對諧波的抑制作用越強。后續(xù)的無位置系統(tǒng)仿真發(fā)現(xiàn):ksa過大時,電流振蕩較大;ksa過小時,電流將發(fā)散;通過調(diào)節(jié),本文取0.45。
據(jù)式(12)、式(13)可得到SACCF的實現(xiàn)框圖,如圖3所示。

圖3 SACCF實現(xiàn)框圖Fig.3 The implement block diagram of SACCF
3 仿真分析
為驗證本文所提SACCF-SMO的估計性能,根據(jù)圖1在Matlab/Simulink中搭建仿真模型,電機參數(shù)為:額定轉(zhuǎn)速nN=3 000 r/min,定子電阻Rs=0.1 Ω,永磁體磁鏈Ψf=0.225 Wb,d軸電感Ld=0.95 mH,q軸電感Lq=2.05 mH,極對數(shù)pn=4,等效轉(zhuǎn)動慣量J=0.195 kg·m2。預設最高轉(zhuǎn)速為2 500 r/min,根據(jù)式(19)將滑模增益k選為260。鎖相環(huán)(phase-locked loop,PLL)參數(shù)基于“帶寬”概念進行選取[14],最大轉(zhuǎn)速加速度為1 500(r·min-1/s);最大允許暫態(tài)角度誤差為10°,PLL帶寬選為65 rad/s。轉(zhuǎn)速環(huán)控制參數(shù)kp,ki為0.34和3.4。PWM開關頻率為5 kHz,系統(tǒng)采樣頻率為10 kHz。仿真結(jié)果如圖4~圖6所示。
圖4比較了傳統(tǒng)帶相位補償?shù)腟MO與SACCF-SMO在提取時的性能差異。相比傳統(tǒng)SMO而言,SACCF-SMO不存在幅值衰減與相位延遲,無需相位補償。此外,對于固定的自適應系數(shù),SACCF在不同中心頻率處的諧波抑制作用相當,如圖2所示。該特性的優(yōu)勢在于,系統(tǒng)顫振不再隨轉(zhuǎn)速降低而增大,而是呈現(xiàn)出等顫振水平。圖 4 中,700 r/min 與 2 500 r/min時,具有相等的顫振水平,即是對該特性的較好驗證。

圖4 SMO與SACCF-SMO提取性能比較Fig.4 The performance comparison of SMO and SACCF-SMO in extracting
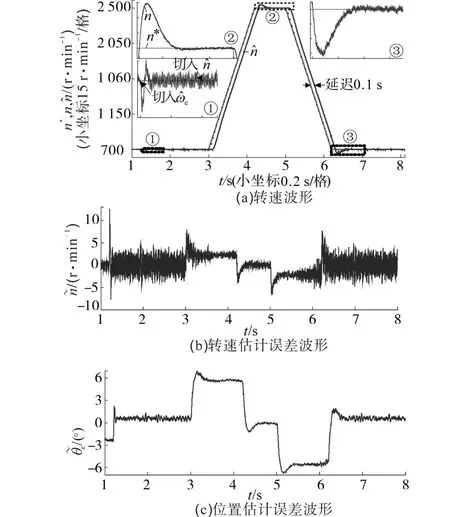
圖5 SACCF-SMO無位置控制系統(tǒng)空載仿真波形Fig 5 The simulation waveforms of sensorless control system realized by SACCF-SMO
圖5~圖 6所示為 700~2 500 r/min速域內(nèi),SACCF-SMO無位置控制系統(tǒng)空載、帶40%最大電磁轉(zhuǎn)矩負載(Temax)時的仿真波形。圖5和圖6中,電機以估計位置啟動,1.2 s時刻SACCF開始采用估計轉(zhuǎn)速,1.6 s時刻轉(zhuǎn)速環(huán)切入估計轉(zhuǎn)速。觀察仿真波形易知:轉(zhuǎn)速跟蹤性能良好,系統(tǒng)基本呈現(xiàn)等顫振水平;轉(zhuǎn)速與位置估計誤差均控制在較小水平,轉(zhuǎn)速最大誤差為15 r/min,位置最大誤差為7.1°;穩(wěn)態(tài)時,轉(zhuǎn)速不存在偏差,位置誤差控制在0.55°以內(nèi)。良好的誤差控制能力使得SACCF-SMO無位置系統(tǒng)具有更強的帶載能力。

圖6 SACCF-SMO無位置控制系統(tǒng)帶載0.4Temax仿真波形Fig.6 The simulation waveforms of sensorless control system realized by SACCF-SMO with 0.4Temaxload
4 實驗驗證
上述仿真結(jié)果表明SACCF-SMO無位置控制系統(tǒng)具有無需相位補償環(huán)節(jié)、等顫振水平、帶載能力更強等優(yōu)勢。為進一步確認這些特性,進行實驗驗證。實驗用PMSM參數(shù)、PWM開關頻率及采樣頻率與仿真一致,兩電平逆變器,主控芯片為TMS320F2812,D/A輸出芯片為TLV5610,直流母線電壓為540 V。滑模增益仍選260,自適應系數(shù)通過實驗調(diào)節(jié)得到,為0.5。轉(zhuǎn)速環(huán)比例、積分系數(shù)為2,20。實驗波形如圖7~圖8所示,加減負載均為0.4Temax。

圖7 1 000 r/min、空載時,標幺的估計反電動勢波形Fig 7 The waveforms of normalized estimated back EMF with 1 000 r/min and no load

圖8 700~2 500 r/min速域內(nèi),SACCF-SMO無位置控制系統(tǒng)帶載0.4Temax實驗波形Fig 8 The experimental waveforms of sensorless control system realized by SACCF-SMO with 0.4Temaxload within 700~2 500 r/min speed range
5 結(jié)論
針對傳統(tǒng)一階SMO無位置控制系統(tǒng)中低通濾波器產(chǎn)生的相位延遲,及后續(xù)的相位補償環(huán)節(jié)中存在的位置誤差隨轉(zhuǎn)速降低而增大及調(diào)試難度大等問題,提出SACCF-SMO無位置實現(xiàn)策略。在較寬速域內(nèi),SACCF對反電動勢的提取具有無相位延遲、無幅值衰減、等顫振水平等優(yōu)良特性。SACCF的引入,從本質(zhì)上剔除了相位補償環(huán)節(jié),簡化了系統(tǒng)結(jié)構(gòu),并且系統(tǒng)帶載能力得到大大的提升,顫振水平得到進一步削弱。