基于冪次混合趨近律的Buck變換器滑模控制方法研究
2021-02-05 09:51:54刁冠勛代運滔
電氣傳動 2021年3期
刁冠勛,代運滔
(1.國網上海市電力公司檢修公司,上海 200063;2.遵義供電局,貴州 遵義 563000)
隨著工業化程度不斷提高,用電設備飛速發展,對電能質量提出更高要求。開關變換器作為電能轉換重要的一環,受到國內外學者的普遍關注。尤其降壓(Buck)變換器,由于在體積、重量和能耗等方面的優勢,被廣泛應用于航空航天、電動汽車、全電艦船等高新領域[1-4]。
Buck變換器輸出電壓及電流諧波含量越低,波形越平滑,電能質量越好。高性能控制算法無疑會提高Buck變換器輸出的電能質量[5]。滑模變結構控制算法對系統外部擾動和內部變化具有強魯棒性,能較好地應用于Buck變換器。文獻[6]針對Buck變換器傳統PI控制動態響應和抗干擾能力差等缺點,提出一種魯棒離散積分滑模電壓控制方法,提高輸出電壓的動態品質和抗擾性,抑制了滑模抖振。文獻[7]針對Buck變換器滑模系數難以確定、動態響應和魯棒性難以同時提高等缺點,提出一種電感電流自適應終端滑模控制方法。通過李雅普諾夫求解系數,構建非線性環節,實現雙閉環滑模控制方法,解決了上述不足。
作為滑模控制算法重要組成部分,趨近律控制方法通過設計趨近律表達方式,調節系統到達滑模面動態性能,進而縮短Buck變換器輸出電壓到達穩態作用時間,減小超調量[8]。文獻[9]針對傳統等速趨近律趨近時間較長、抖振嚴重等情況,提出一種新型趨近律控制方法。該方法提高系統趨近速度,抑制滑模抖振,仿真結果證明了該方法的有效性。為補償Boost變換器非線性滑模等效和實際控制之間的誤差,文獻[10]提出一種新型趨近律,使系統狀態在遠離和靠近滑模面時,均能保持較快趨近速度,減小滑模抖振。文獻[11]通過引入滑模參數和系統狀態,重新設計趨近律參數,并采用冪次函數取代開關函數,加快Buck變換器動態響應,減小超調量。
在上述文獻基礎上,本文針對Buck變換器,提出一種新型冪次混合趨近律控制方法。通過對趨近律參數進行自適應調節,進一步提高系統收斂速度,減小抖振。
1 Buck變換器狀態方程
Buck變換器又稱降壓變換器。通過開關管通斷,將變換器輸入電壓轉換為低輸出電壓,以供用電設備使用。Buck變換器拓撲結構如圖1所示。
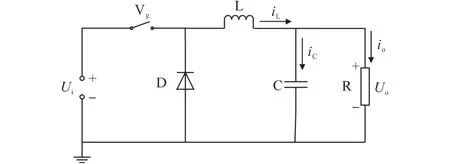
圖1 Buck變換器拓撲結構Fig.1 Buck converter topology
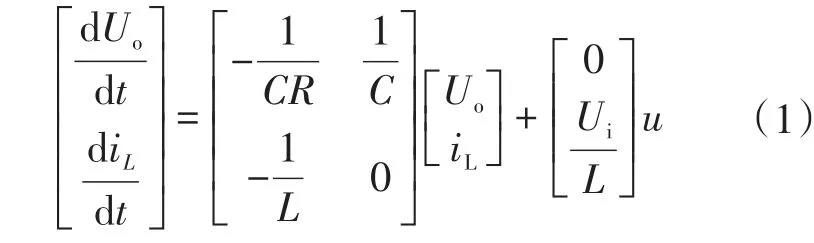
圖1中,變換器輸入電壓、輸出電壓分別用Ui和Uo表示。假設Buck變換器帶線性負載R,主體結構由開關管Vg、二極管D、電感L、電容C組成。當開關管Vg導通時,電流通過電感L,流到電容C和負載R,電感L和電容C分別起濾波和儲能作用。此時二極管承受反向電壓關斷。當開關管Vg關斷時,二極管承受正向電壓導通,電感L電流不能立刻降為零,起續流作用,同時電容C釋放存儲電能給負載R。通過快速通斷開關管,輸出電壓Uo能穩定于參考電壓Uref。定義u=1為開關管Vg導通,u=0為開關管Vg關斷,因為電感L和電容C均為儲能元件,以電感電流iL和輸出電壓Uo為狀態變量,求得狀態方程如下:
以式(1)為基礎,進一步求解Buck變換器二階狀態方程。定義Buck變換器輸出電壓誤差x1=Uref-Uo,輸出電壓誤差變化率根據系統狀態,可得Buck變換器二階狀態方程為
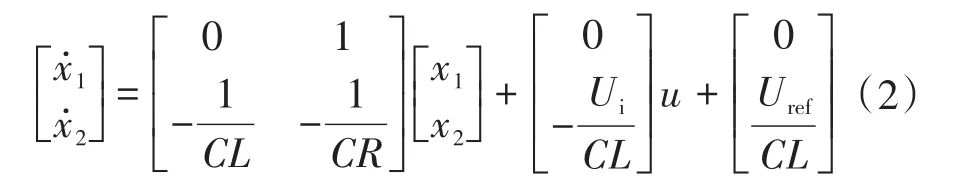
式(2)狀態方程為非線性,滑模控制同樣為典型的非線性算法,非常適合應用于式(2)的方程。對于滑模控制算法,滑模面選取至關重要,本文選用線性滑模面如下式:

其中,滑模面參數k1>0,k2> 0。對式(3)求導,并將式(2)代入,可得開關管Vg控制作用u為
式中:為冪次混合趨近律。
2 Buck變換器滑模控制方法設計
2.1 冪次混合趨近律提出
高為炳院士最早提出趨近律控制方法[12]。指數趨近律設計簡單,應用最廣,其數學表達式為

當系統從初始位置s(0)運行至滑模面s(t)=0時,求得到達時間為

初始位置s(0)<0運行至滑模面作用時間以此類推。從式(6)可以看出,在初始位置不變的情況下,到達時間與趨近律參數k和ε有關,與系統數學模型無關。到達時間保持不變,是指數趨近律最大的優點。但指數趨近律缺點明顯,無法真正意義上消除系統抖振。
為克服指數趨近律的缺點,文獻[13]提出一種變指數趨近律:

式中:X為系統狀態。
相比指數趨近律,變指數趨近律能加快系統趨近速度,在距離滑模面較近時,隨系統狀態大小調節趨近速度,最終收斂于平衡點。但變指數趨近律有兩大不足:1)距離滑模面較遠時,系統趨近速度沒有冪次趨近律快;2)當到達滑模面,系統狀態較大時,趨近速度較快,超調量較大。
針對以上兩點不足,本文在變指數趨近律基礎上,提出一種新型冪次混合趨近律,表達形式如下:
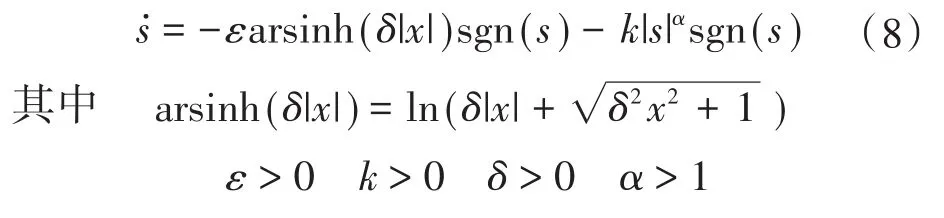
式中:sgn(s)為符號函數;x為系統狀態;arsinh(δ|x|)為反雙曲正弦函數。
arsinh(δ|x|)根據系統狀態x自適應調節趨近速度,曲線如圖2所示。
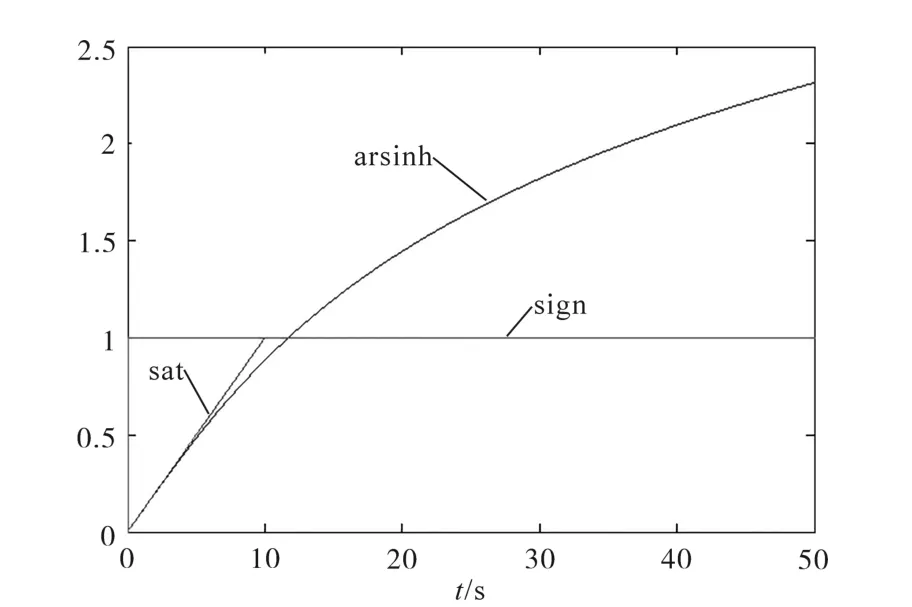
圖2 三種函數曲線比較(δ=0.1)Fig.2 Comparison of three function curves(δ=0.1)
從圖2中可以看出,系統狀態較大時,arsinh具有比符號函數sign和飽和函數sat更快的收斂速度;系統狀態靠近滑模面時,arsinh收斂速度變緩,且曲線光滑性更好,能減少超調量,減小系統抖振。
冪次混合趨近律由-εarsinh(δ|x|)sgn(s)項和-k|s|αsgn(s)項組成。通過以上分析,當系統距離滑模面較遠時,-k|s|αsgn(s)項起主要作用,與-εarsinh(δ|x|)sgn(s)項共同作用,維持較快的趨近速度。當系統距離滑模面較近時,-k|s|αsgn(s)項由于冪次項,趨近速度呈幾何倍速放緩。-εarsinh(δ|x|)sgn(s)項起主要作用,且趨近速度隨系統狀態減小而減小,自適應調節滑模抖振,直到系統最后收斂于平衡點。
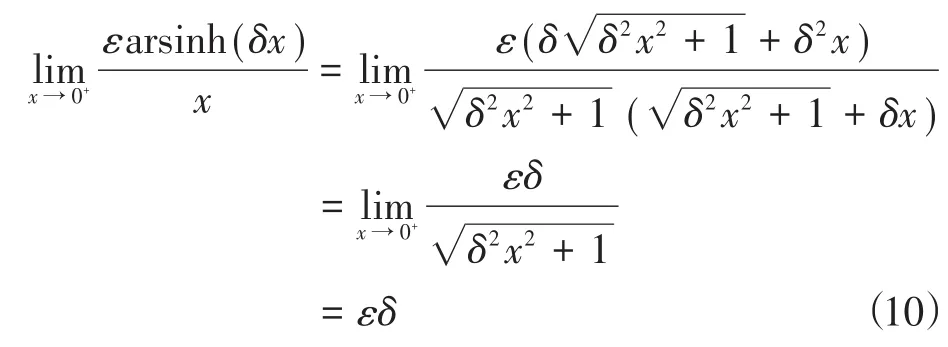
切換帶能調節系統到達滑模面的抖振大小。由上文分析,冪次混合趨近律到達滑模面的抖振大小,主要由 -εarsinh(δ|x|)sgn(s)項決定。系統到達滑模面,趨近平衡點過程中,若平衡點附近x=0+→x=0,則

對分子、分母求導,得:
同理,若平衡點附近x=0-→x=0,則
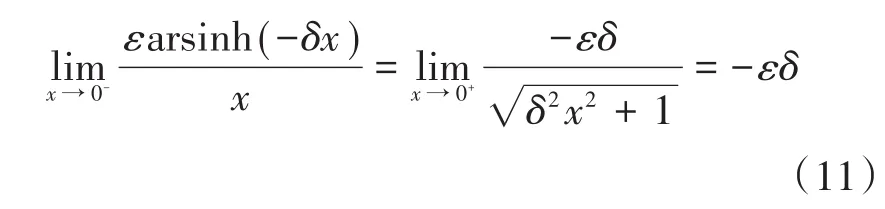
根據式(10)、式(11),系統到達滑模面后的穩態性能由參數ε,δ決定,尤其平衡點附近抖振,由參數ε和δ的乘積決定。
本文提出的冪次混合趨近律控制方法,有效克服文獻[13]變速趨近律不足。首先,引入冪次項,有效提高系統趨近速度。其次,當到達滑模面,系統狀態較大時,arsinh(δ|x|)arsinh(δ|x|)項有效降低系統狀態大小,進而減小超調量。
2.2 控制性能分析
滑動模態成立的前提是滿足到達條件,定義李雅普諾夫(Lyapunov)函數為

對式(12)求導,得:
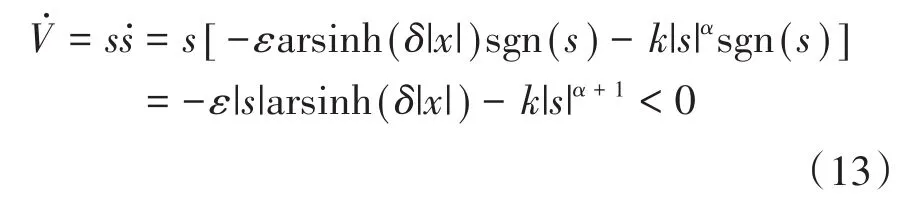
由式(13)可知,本文設計的冪次混合趨近律控制方法滿足到達條件。
Lyapunov穩定性條件只是定性分析冪次混合趨近律控制方法有效性,下面對到達時間進行定量分析。
1)若系統狀態s(0)>0,則式(8)化為

系統從初始狀態第1次到達滑模面s(t)=0的作用時間為

由上文分析,距離滑模面較遠時,-k|s|αsgn(s)項起主要作用;距離滑模面較近時,-εarsinh(δ|x|)sgn(s)項起主要作用。兩者以s=1為分割點,則式(15)變為

由于 arsinh(δ|x|)是遞增函數,在s(0)→0 過程中,|x|∈ [xmin,xmax],則

2)若系統狀態s(0)<0,推導方法依次類推。
由此可見,采用冪次混合趨近律控制方法,系統能在一定時間內到達滑模面。
2.3 比較驗證
為驗證冪次混合趨近律控制方法的快速性和穩定性,與指數趨近律和冪指數趨近律進行比較,并應用于二階系統:

初始狀態為[20,0]T,滑模面如式(3),k1=10,k2=1。三種趨近律參數分別如下:
1)冪次混合趨近律:趨近律表達式見式(8)。
2)指數趨近律:

3)冪指數趨近律:

參數取k=10,ε=10,α=2,δ=0.2,滑模面s如圖3所示,系統狀態x1,x2分別如圖4、圖5所示。
通過比較指數趨近律和冪次指數趨近律,|s|α項有效提高系統趨近速度;通過比較冪指數趨近律和冪次混合趨近律,arsinh(δ|x|)項減少了超調量,隨著系統狀態自適應調節滑模抖振,最終收斂于平衡點。通過式(17),計算系統從初始狀態到滑模面作用時間t<0.1 s+0.2 s,符合圖3系統到達滑模面時間,印證了計算方法的有效性。
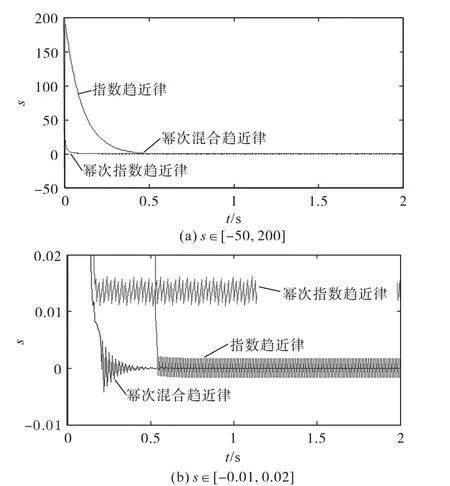
圖3 滑模面sFig.3 Sliding surface s

圖4 系統狀態x1Fig.4 System status x1
2.4 二階控制器設計
滑模控制算法對外部干擾和參數變化具有極強的魯棒性。理想的Buck變換器輸出電壓最終收斂于Uref,但實際滑模控制中,時延和滯后等干擾會產生誤差。定義誤差為d,則滑模面s變為

當系統到達滑模面,求得系統狀態為

由此可見,當存在誤差d時,系統狀態最終收斂于-d/k1。增大k1能減少Buck變換器的穩態誤差,但過大的k1會造成輸出電壓超調量較大。
根據李導數定義,求得等效控制ueq為
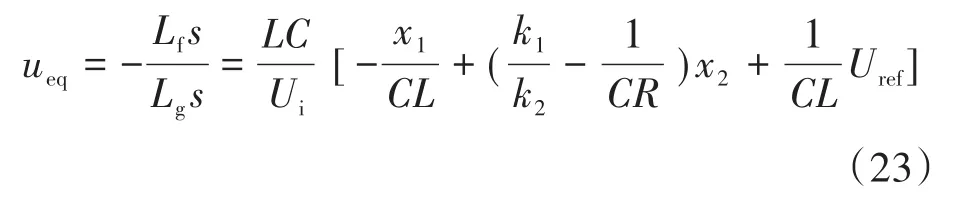

當k1/k2=-1/CR時,等效控制ueq不再受輸出電壓變化率影響,此時等效控制ueq=Uo/Ui。綜上,對滑模面參數k1,k2取值時,應該先確定k1值,進而通過比例關系,求得k2值大小。
將式(8)代入式(4),求得開關管Vg控制作用u為
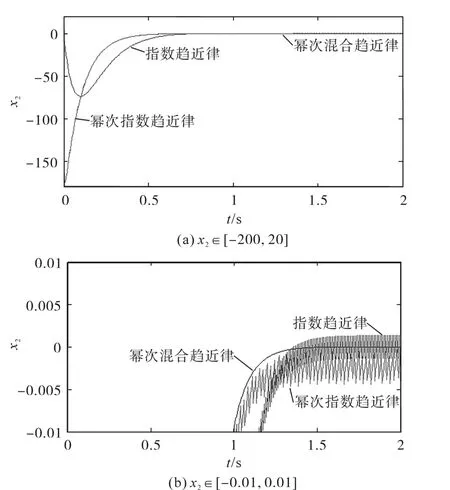
圖5 系統狀態x2Fig.5 System status x2
3 仿真和實驗
為驗證本文提出的Buck變換器冪次混合趨近律控制方法有效性,將其與指數趨近律控制方法進行比較,并搭建控制器Matlab/Simulink仿真模型。Buck變換器參數為:電容C=0.05 mF,電感L=0.75 mH,電阻R=10 Ω,輸入電壓Ui=36 V,參考電壓Uref=20 V。滑模面參數:k1=200,k2=1。圖6為基于兩種趨近律控制方法的Buck變換器輸出電壓比較;圖7為基于兩種趨近律控制方法的Buck變換器電感電流比較。
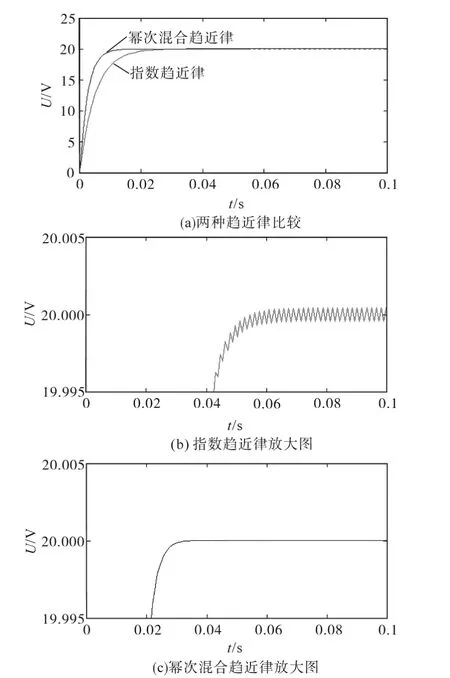
圖6 Buck變換器輸出電壓Fig.6 Buck converter output voltage
從圖6、圖7可以看出,采用指數趨近律控制策略,輸出電壓到達穩態時間較長,超調量較大,穩態后波動較大。而采用冪次混合趨近律控制策略,輸出電壓到達穩態時間較短,超調量幾乎為零,穩態后無波動。電感電流進一步證明控制策略的有效性。
為驗證基于冪次混和趨近律的滑模控制器有效性,搭建實驗平臺將其與指數趨近律相比較。Buck變換器輸入電壓由可編程電源Chroma 6250P提供,輸出電壓范圍0~600 V,選擇36 V作為輸入電壓。二極管型號為STPS20200CT,電感型號為具有高額定電流的VLB12065HT-R36,大小為0.5 mH。電容型號為GRM32ER71H106MA12,采用2個10 μF電容并聯。負載采用可編程電子負載Agilent 6060B。開關管采用TI公司的CSD16414Q5。圖8為通電后,基于兩種趨近律控制方法的輸出電壓實驗波形比較;圖9為穩態后,基于兩種趨近律控制方法的輸出電壓實驗波形比較。
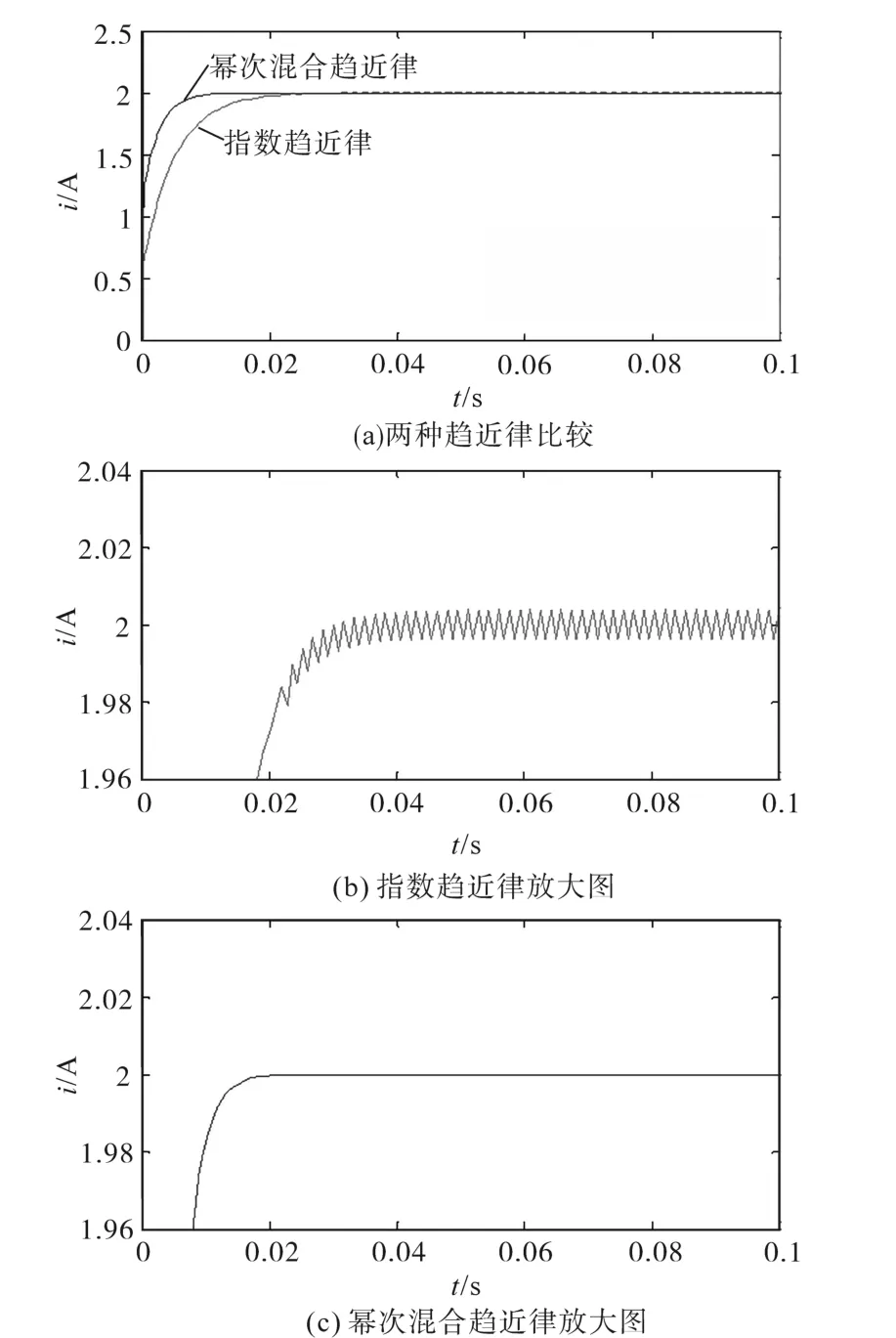
圖7 Buck變換器電感電流Fig.7 Buck converter inductor current
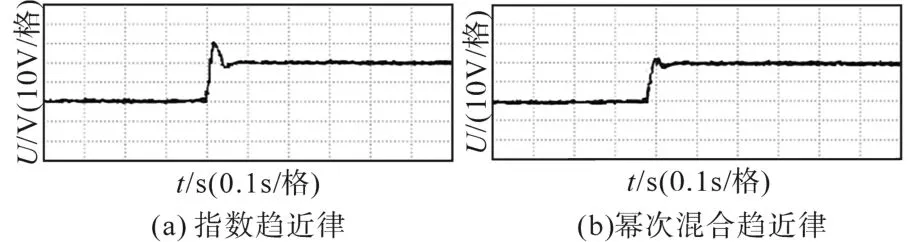
圖8 通電后輸出電壓實驗波形比較Fig.8 Comparison of output voltage experimental waveforms after power-on
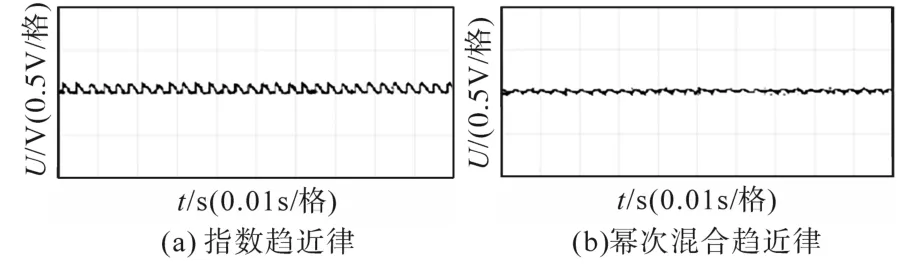
圖9 穩態后輸出電壓實驗波形比較Fig.9 Comparison of output voltage experimental waveforms after steady state
從以上實驗圖可以看出,相比于指數趨近律控制方法,本文提出的冪次混合趨近律控制方法輸出電壓動態調節時間更快,超調量較小,穩態后電壓波動小,與仿真結果保持一致。
4 結論
本文在指數趨近律基礎上,提出一種基于冪次混合趨近律的Buck變換器滑模控制方法。通過引入冪次函數和反雙曲正弦函數,提高系統趨近速度,減少穩態誤差,提高穩態性能。給出Buck變換器狀態空間方程以及滑模控制器設計流程。本文提出的基于冪次混合趨近律滑模控制方法不僅用于Buck變換器,還能用于一般意義的非線性模型,例如永磁同步電機、機械臂等,具有較強的普適性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
意林原創版(2016年10期)2016-11-25 10:28:30
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34