一種面向光纜自動收排過程的遠程監控系統
2021-02-03 10:55:54傅勝軍唐敦兵王仕存段祺舜惠大可
機械制造與自動化 2021年1期
關鍵詞:系統
傅勝軍,唐敦兵,,王仕存,段祺舜,惠大可
(1. 南京航空航天大學 機電學院,江蘇 南京 210016; 2. 南京航空航天大學 無錫研究院,江蘇 無錫 214154)
0 引言
光纜收排是指在光纜護套生產過程中,當套塑冷卻完成后,線纜被整齊卷繞到收線盤上的過程,并要求收排平坦緊實,無穿插,無壓摞跳線[1]。為更好地實現光纜自動化收排,基于當前設備和工藝開發高效、實用的遠程監控系統。本文提出了一套能夠對光纜自動收排過程進行遠程監控的系統,可為企業生產提供遠程監控服務。方案采取PLC+PROFINET構成現場控制系統,實現了現場設備間通信[2],并通過OPC UA和Socket技術開發數據采集層,實現遠程監控平臺和現場控制設備間的數據交互[3]。該控制系統基于云端服務器和web技術將生產現場的情況進行發布,生產人員在任何地方都可以實時查看生產狀態數據、歷史記錄、報警信息等,并及時進行控制管理。
1 遠程監控系統總體設計
1.1 光纜收排過程及監控對象
如圖1所示,光纜的收排過程主要由收線和排線構成,光纜通過牽引在收卷運動和排線運動的作用下,進行收排。收卷運動使光纜卷繞到線盤上,排線運動為排線電機帶動整體收線機構沿排線方向水平移動。線盤每收卷一圈,排線移動一個排線節距。若當前層被排滿,排線運動則反向,進行下一層線纜的收排。

圖1 光纜收排過程示意圖
由上述對收排過程可知,面向光纜自動收排過程的遠程監控系統主要針對以下生產對象進行監控:1)收排線狀態:收卷角速度、實際線速度、排線節距、尋邊距離、收線層數等;2)工藝參數:電纜直徑、預制計米長度、手動速度設定、線盤直徑和盤寬等;3)生產統計及報警信息:收排計米長度、單盤生產周期、PLC報警信息等。
1.2 系統整體架構
本文規劃了一種3層架構的自動化光纜收排遠程監控系統方案,如圖2所示。

圖2 遠程監控系統整體架構
第1層為收排控制層,設定為現場控制器和各類現場設備,如PLC、收排線電機傳感器等,該層主要負責自動化控制和數據收集。第2層為數據采集層,主要由控制室PC機構成,負責收排現場和云端監控平臺的數據交互,讀取控制層的生產數據(如收卷速度、收線層數、計米長度和報警信息等),同時從云端監控平臺獲取監控指令和參數(如預制計米長度、手動設定速度等)。第3層為云端監控平臺,該層以云端服務器為中心,負責將數據進行處理和發布。
2 遠程監控系統關鍵技術實現
2.1 現場收排控制
在自動收排控制系統中,要求收排控制層的網絡具有一定實時性、穩定性和安全性,本文采用了PROFINET工業以太網的通信方式,實現了控制層分布式IO和控制的主干[4]。光纜自動收排現場控制系統由一臺S7-1500PLC和兩臺S7-1200PLC、G120變頻器、HMI觸摸屏等構成。在收排控制層的PROFINET通信中,西門子S7-1500PLC作為PROFINET IO控制器,S7-1200PLC和變頻器等其他設備作為PROFINET從站設備。
針對收排的不同控制要求,采用了一種偏差耦合同步控制和主從同步控制相結合的控制結構,如圖3所示。牽引運動和收卷運動要求線速度相同,所以采用偏差耦合同步控制,引入前饋環節,動態對電機速度進行補償,從而達到良好的同步性能。對于收卷運動和排線運動,收線盤每轉動一周,排線移動一個排線節距。因此采用主從同步控制結構,排線電機(從電機)實時跟蹤收卷電機(主電機)的輸出,來實現精密排線。該結構在保證了自動收排精度的同時降低了系統的運算負載。通過增加比例器1/R1和1/R2來確保電機的線速度同步,R1和R2分別為牽引、收卷半徑,R2隨著收卷層數的增加不斷增大。同時通過引入前饋控制,增加PI速度補償器,實時消除轉動慣量變化等擾動給同步控制帶來的誤差。

圖3 收排系統控制策略結構圖
現場控制程序的主要流程如圖4所示。設備在初始化后,將空收線盤上盤,并與光纜進行固定。然后牽引電機、收卷電機、排線電機協調運動,進行收排。當設備上的尋邊傳感器檢測到排線到邊,本層排線結束,排線運動反向運行,進行下一層光纜的收排。直至收排長度到達預制計米長度,本盤收排結束,將光纜打扎后,卸下收滿的線盤。上述流程循環執行,以實現持續上盤收線。

圖4 光纜收排控制程序流程
2.2 數據采集
數據采集層通過OPC UA通信訪問現場控制主站,對收排控制層數據進行存取,同時數據采集層通過Socket與云端監控平臺進行數據交互。
OPC UA使用客戶端/服務器模式通信[4-5]。OPC UA通信中,OPC UA服務器為現場S7-1500PLC,在控制室PC機上開發OPC UA客戶端模塊,作為采集層與OPC UA服務器交互的OPC UA客戶端接口,實現數據采集層與現場收排控制層的數據交互。
系統的數據交互過程如圖5所示。針對OPC UA客戶端通信模塊采用不同的交互方式。傳輸的數據主要分為以下幾種:1)傳感器、編碼器采集:動作限位、尋邊距離、牽引和收排速度、PLC和變頻器報警信息等;2)PLC累計運算得到:收排計米長度、生產周期、班產量等;3)云端監控平臺或現場HMI設定:如排線節距、預制計米長度、手動速度等。
1)類數據是現場狀態的動態反映,變化較快,監控實時性要求較高,因而采用OPC UA訂閱監視變量的方式進行訪問,并通過在服務器上注冊提高訪問速度。2)類數據在收排過程中不斷地累計變化,但監控實時性要求不是很高,所以采用標準的循環讀寫方式訪問。3)類數據采用事件觸發的方式進行讀寫訪問,當數據改變時,OPC UA客戶端程序才進行讀寫。根據上述交互方式,將客戶端通信功能封裝成了以下幾個模塊:遠程參數設定模塊、實時狀態采集模塊、生產信息統計模塊、現場工藝參數采集模塊、連接和初始化模塊。

圖5 光纜自動收排的監控系統數據交互過程
收排控制層的數據被OPC UA客戶端通信模塊采集后,經過格式轉換,由Socket客戶端通信模塊發送給云端監控平臺,其中的生產統計信息和實時報警信息將通過JDBC進行數據庫存儲,作為本地記錄和備份。同時,Socket客戶端通信模塊接收來自云端監控平臺的控制信息,格式轉換后,由OPC UA客戶端通信模塊下發給現場的PLC主站,對收排過程進行控制。數據在云端監控平臺和數據采集層之間通過Json格式進行交互,Json是一種輕量級的數據交換格式[6],可方便地使用工具進行解析。
數據采集層通過開發OPC UA通信客戶端程序和Socket通信客戶端程序,完成了云端監控臺和收排控制層的信息交互。
2.3 云端監控平臺設計
云端監控平臺以云端服務器為中心,將系統數據進行展示并提供監控界面作為遠程控制接口。云端監控平臺采用MVC設計模式進行開發。MVC設計模式將系統分為控制層(Control)、模型層(Model)和顯示層(View),采用模型層封裝業務方法,顯示層則將數據和可視化界面返回給用戶,控制層接受輸入并調用Model和View完成請求[7]。
在云端監控平臺中,遠程監控端負責提交遠程監控請求和獲取監控結果,這就需要可視化界面設計,而數據采集層主要與云端監控平臺進行數據交互。因此,將控制層、顯示層分為面向遠程監控端和面向數據采集層兩種,即面向遠程監控客戶端的遠程監控控制層、遠程監控顯示層和面向車間數據采集層的車間通信控制層,如圖6所示。

圖6 云端監控平臺的MVC設計模式
車間通信控制層將來自采集層的數據進行格式轉換。遠程監控控制層在收到遠程監控端的監控請求后,調用模型層的業務方法將可視化界面交給遠程監控顯示層返回給遠程監控端。系統中使用Ajax(異步JavaScript和XML)技術開發監控界面[8],可在不刷新整個頁面的情況下與服務器交互,其降低了網絡負載,保證了交互實時性。
3 系統實際運行
對現有光纜收排設備進行改造,通過傳感器、編碼器、變頻器等設備進行數據收集和動作控制,完成了現場控制系統的硬件搭建。在分析光纜收排過程的基礎上,設計并開發光纜自動收排控制程序。同時,在車間控制室計算機上開發數據采集層程序,在云端服務器上部署云端監控平臺。監控系統的實際運行情況如圖7所示。
遠程監控界面的窗口區主要分為五大區塊:①監控選項區。可通過菜單選擇分別進行生產狀態實時監控、歷史統計數據查詢、歷史報警信息查詢等。②生產狀態實時監控區。用于動態展示光纜收排過程中的生產狀態,如收排速度、排線節距和動作限位等。③遠程控制區塊。可對收線速度、預制計米長度進行手動設定,對計米數據進行復位和系統啟停控制。④單盤生產信息統計的區塊。展示如收排計米長度、單盤生產周期和當前層數等。⑤參數展示區塊,展示如光纜直徑和線盤參數等信息。平臺還具有實時警報功能,可通過彈窗實時顯示現場報警信息。
針對所開發的自動收排遠程監控系統,通過現場測試檢測,遠程監控平臺平均延遲在0.8~1.5s,現場控制器平臺控制指令的平均響應時間約為0.8s,該檢測結果在可接受范圍內。利用遠程監控平臺對整個車間收排狀況進行查看,耗時在1min以內,相較于人工現場監測需要耗時的10~15min,監控效率大幅提高,系統達到預期監控目標。
4 結語
本文設計了一種面向光纜自動收排過程的遠程監控方案。通過PROFINET實現了控制現場的設備通信,并設計了電機控制方案,同時基于web技術設計了云端監控平臺,使用OPC UA和Socket開發數據采集層,實現了收排現場與云端監控平臺的數據交互。遠程監控系統完成了對光纜自動收排過程的實時監控與記錄。系統的開發大大降低了對光纜自動收排車間監控與管理的成本,生產管理人員可隨時隨地便捷地了解現場狀況,為光纜加工企業的車間無人化和生產管理信息化奠定了基礎。
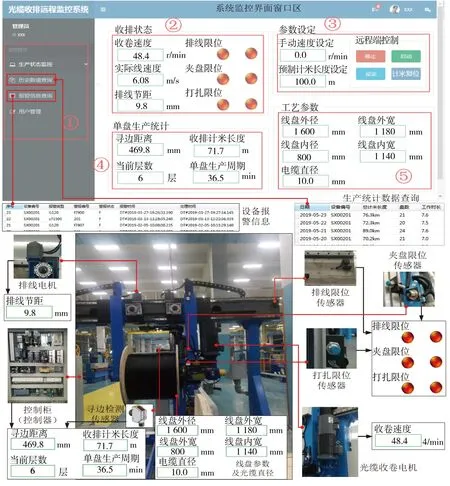
圖7 遠程監控系統實際運行
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
