基于RecurDyn的八連桿機(jī)構(gòu)參數(shù)化設(shè)計(jì)及優(yōu)化
2021-02-03 10:55:30陳小崗張登峰張軍左偉杰
機(jī)械制造與自動(dòng)化 2021年1期
關(guān)鍵詞:優(yōu)化設(shè)計(jì)
陳小崗,張登峰,張軍,左偉杰
(1. 南京理工大學(xué) 機(jī)械工程學(xué)院,江蘇 南京 210094;2. 揚(yáng)力集團(tuán)股份有限公司,江蘇 揚(yáng)州 225127;3. 淮陰工學(xué)院 先進(jìn)制造技術(shù)重點(diǎn)實(shí)驗(yàn)室,江蘇 淮安 223003)
0 引言
以八連桿機(jī)構(gòu)為主傳動(dòng)機(jī)構(gòu)的沖壓機(jī)在乘用車覆蓋件的生產(chǎn)中有廣泛的應(yīng)用,其對工作行程中的最大拉伸深度、最大拉伸速度及拉伸速度的波動(dòng)量、最大加速度及加速度波動(dòng)量等指標(biāo)有較高要求。針對八連桿機(jī)構(gòu)的優(yōu)化設(shè)計(jì)問題,業(yè)內(nèi)學(xué)者從解析、仿真等方面進(jìn)行了各種探索。高霞[1]在導(dǎo)出八連桿壓力機(jī)行程、速度、加速度解析模型的基礎(chǔ)上,提出了機(jī)構(gòu)參數(shù)與增力比的解析模型,獲得了機(jī)構(gòu)參數(shù)對增力比的影響趨勢。袁良照等[2]以壓力機(jī)行程設(shè)計(jì)誤差和工作行程拉伸速度波動(dòng)量建立多目標(biāo)優(yōu)化函數(shù),采用帶精英策略的非占優(yōu)排序遺傳算法NSGA-II對含有12個(gè)優(yōu)化變量的模型進(jìn)行優(yōu)化。姚菁琳等[3]針對八連桿壓力機(jī)的傳動(dòng)機(jī)構(gòu),利用Newton-Raphson迭代法解出其性能曲線,采用OPTDES-SQP二次規(guī)劃算法優(yōu)化滑塊的加速度曲線。李啟鵬等[4]應(yīng)用約束變尺度算法對八連桿機(jī)構(gòu)進(jìn)行優(yōu)化設(shè)計(jì)。余發(fā)國等[5]以不干涉條件、拉伸速度和加速度為懲罰項(xiàng),使用復(fù)合形法對具有13個(gè)優(yōu)化參數(shù)的八連桿機(jī)構(gòu)進(jìn)行了優(yōu)化。白育全[6]以減小工作行程內(nèi)的速度波動(dòng)量、壓力角以及運(yùn)動(dòng)過程中的曲柄平均功率,降低加速度的最大值為目標(biāo),對八連桿沖壓機(jī)構(gòu)進(jìn)行了優(yōu)化。程超等[7]基于曲柄存在條件建立約束關(guān)系,并以工作行程內(nèi)滑塊速度標(biāo)準(zhǔn)差最小為目標(biāo)進(jìn)行優(yōu)化。優(yōu)化后最大速度由590mm/s降至425mm/s,標(biāo)準(zhǔn)差由175mm/s降至120mm/s。伊啟平等[8]基于ADAMS平臺(tái)獲得八連桿沖壓機(jī)構(gòu)沖頭的運(yùn)動(dòng)特性曲線,并以沖頭最大加速度取得最小值為目標(biāo)進(jìn)行了優(yōu)化。優(yōu)化后的最大加速度降低了52%。范云霄等[9]借助ADAMS中的虛擬樣機(jī)模型,以工作行程內(nèi)速度波動(dòng)量最小為目標(biāo),對八連桿傳動(dòng)機(jī)構(gòu)進(jìn)行了優(yōu)化設(shè)計(jì)。
本文針對現(xiàn)有八連桿機(jī)構(gòu)總行程滿足要求但有效工作行程不足的現(xiàn)狀,基于RecurDyn[10]多體仿真平臺(tái),通過參數(shù)化建模及優(yōu)化,在滿足工作行程拉伸速度要求的前提下,增大有效工作行程,使其符合乘用車大型覆蓋件沖壓生產(chǎn)的需要。
1 八連桿機(jī)構(gòu)的運(yùn)動(dòng)學(xué)建模及仿真
1.1 運(yùn)動(dòng)學(xué)建模
八連桿機(jī)構(gòu)的機(jī)構(gòu)簡圖如圖1所示。組成該機(jī)構(gòu)的八個(gè)構(gòu)件為:機(jī)架OC、連桿OA、連桿AEF、連桿FG、連桿AB、連桿BCDG。其中連桿OA為原動(dòng)件,作勻速轉(zhuǎn)動(dòng),滑塊為末端輸出件,作直線往復(fù)運(yùn)動(dòng)。該機(jī)構(gòu)的拓?fù)浣Y(jié)構(gòu)如圖2所示。

圖1 八連桿機(jī)構(gòu)簡圖
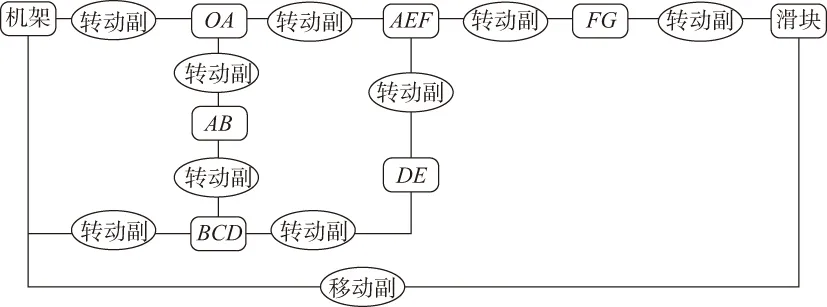
圖2 八連桿機(jī)構(gòu)拓?fù)浣Y(jié)構(gòu)圖
該機(jī)構(gòu)為閉式并聯(lián)機(jī)構(gòu)[11],在機(jī)架與末端滑塊間存在多條運(yùn)動(dòng)鏈。運(yùn)動(dòng)鏈一由機(jī)架、OA、AEF、FG、滑塊組成,運(yùn)動(dòng)鏈二由機(jī)架、OA、AB、BCD、DE、AEF、FG、滑塊組成。
八連桿機(jī)構(gòu)各桿初始參數(shù)為:OA=250mm,AB=1650mm,BC=650mm,CD=900mm,DE=1750mm,AE=1000mm,AF=1150mm,F(xiàn)G=1300mm;∠EAF=40°,∠BCD=170°。
相應(yīng)關(guān)節(jié)的中心位置坐標(biāo)為:O(0,0)、A(-125,216.506 4)、B(1 226.136 1,1 163.570 9)、C(1 550,600)、D(1 856.111 6,-246.342 5)、E(176.309 4,-737.020 1)、F(-564.413 4,-846.233 5)、G(0,-2 017.317 4),單位為mm。
1.2 運(yùn)動(dòng)仿真
根據(jù)設(shè)計(jì)要求,總行程≥1200mm,行程次數(shù)為10~15次/分,最大拉伸深度(即有效工作行程)≥400mm,且在有效工作行程內(nèi)最大拉伸速度不超過450mm/s。
基于多體系統(tǒng)仿真軟件RecurDyn,建立機(jī)構(gòu)運(yùn)動(dòng)仿真模型,獲得曲柄OA旋轉(zhuǎn)一周過程中,滑塊的位移曲線、速度曲線如圖3所示。曲柄轉(zhuǎn)速為15r/min(對應(yīng)于每分鐘行程次數(shù)10~15次,取大值15次/分,,即1.57rad/s)。

圖3 滑塊的位移曲線與速度曲線
仿真結(jié)果表明,該機(jī)構(gòu)最大行程為1246.7mm,符合設(shè)計(jì)要求;以450mm/s為有效行程中允許的最大工作速度,則有效工作行程僅為318.6mm,未達(dá)設(shè)計(jì)指標(biāo)要求,因此需對該機(jī)構(gòu)進(jìn)行構(gòu)件尺寸(即各桿長度)優(yōu)化設(shè)計(jì)。
2 尺寸優(yōu)化設(shè)計(jì)
2.1 參數(shù)化建模
依據(jù)數(shù)學(xué)建模一般理論,優(yōu)化模型包括優(yōu)化目標(biāo)、設(shè)計(jì)變量、約束條件三個(gè)要素。本文基于RecurDyn的特點(diǎn),舍棄傳統(tǒng)的直接以構(gòu)件尺寸(本設(shè)計(jì)中即各桿長度)為設(shè)計(jì)變量的方法,而選擇以各鉸鏈中心位置為設(shè)計(jì)變量;優(yōu)化目標(biāo)為有效工作行程獲得最大值;約束條件包括兩方面,一是總行程≥1200mm,二是有效工作行程內(nèi)的最大速度不超過450mm/s。
依次建立表達(dá)式、參數(shù)化值及參數(shù)化點(diǎn),分別如圖4、圖5、圖6所示,基于參數(shù)化點(diǎn)建立八連桿機(jī)構(gòu)的參數(shù)化模型。本設(shè)計(jì)中八連桿機(jī)構(gòu)的參數(shù)化模型包括7個(gè)點(diǎn)、13個(gè)參數(shù)化變量。

圖4表達(dá)式
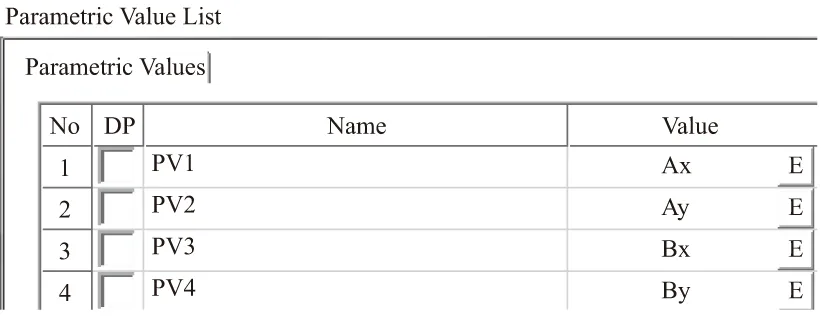
圖5 參數(shù)化值
2.2 優(yōu)化設(shè)計(jì)
a)主運(yùn)動(dòng)鏈參數(shù)優(yōu)化

圖6 參數(shù)化點(diǎn)
首先選擇主運(yùn)動(dòng)鏈上的A、F、G三點(diǎn)進(jìn)行優(yōu)化,設(shè)計(jì)變量包括Ax、Ay、Fx、Fy、Gy。三水平試驗(yàn),±10%,除考察總行程、有效工作行程(有效行程內(nèi),拉伸速度不超過450mm/s)之外,還考察OA、AB、AF、AE、FG的桿長總和。從243組候選解中獲得兩個(gè)優(yōu)選解。在“總行程≥1200”的前提下,“有效行程”最大,稱為“AFG優(yōu)選解一”。考慮機(jī)構(gòu)總體尺寸盡量取小,在243組候選解中,記5根桿的桿長總和最小值為“最小總和”。在“總行程≥1200”的前提下,以“有效行程/(桿長總和-最小總和)”為指標(biāo)進(jìn)行降序排列,取其最大者,稱為“AFG優(yōu)選解二”。
綜上,對Ax、Ay、Fx、Fy、Gy五變量進(jìn)行優(yōu)化后,獲得優(yōu)選解如表1所示。

表1 A、F、G三點(diǎn)五變量優(yōu)化結(jié)果 單位:mm
由表1可知,優(yōu)選解一的優(yōu)勢在于有效行程較大,但桿系總體尺寸也較大,而優(yōu)選解二桿系總體尺寸較小,但有效行程也偏小。針對A、F、G三點(diǎn)的優(yōu)化,顯著增大了有效工作行程。在針對第二運(yùn)動(dòng)鏈進(jìn)行參數(shù)優(yōu)化時(shí),將分別基于上述解一、解二進(jìn)行。
b) 第二運(yùn)動(dòng)鏈參數(shù)優(yōu)化
在主運(yùn)動(dòng)鏈A、F、G優(yōu)化的基礎(chǔ)上,對第二運(yùn)動(dòng)鏈中的B、C、D、E四點(diǎn)的8個(gè)坐標(biāo)變量進(jìn)行優(yōu)化。分為兩次進(jìn)行,首先對C、E兩點(diǎn)進(jìn)行優(yōu)化,基于優(yōu)化結(jié)果,再對B、D兩點(diǎn)進(jìn)行優(yōu)化。
1) 基于“AFG解一”參數(shù)優(yōu)化
基于AFG優(yōu)選解一,進(jìn)一步對C、E點(diǎn)進(jìn)行優(yōu)化,考察BC、CD、AE、DE桿長總和,獲得81組候選解,其中僅有一組候選解的“有效行程”>400mm,稱為“CE優(yōu)選解一”。C、E點(diǎn)優(yōu)化前后對比如表2所示。

表2 C、E兩點(diǎn)四變量優(yōu)化最優(yōu)解一 單位:mm
對于CE優(yōu)選解一,進(jìn)一步對B、D點(diǎn)進(jìn)行優(yōu)化,考察AB、BC、CD、DE桿長總和,獲得81組候選解,有3組候選解的“有效行程”>400mm,且“總行程”>1200mm,如表3所示。
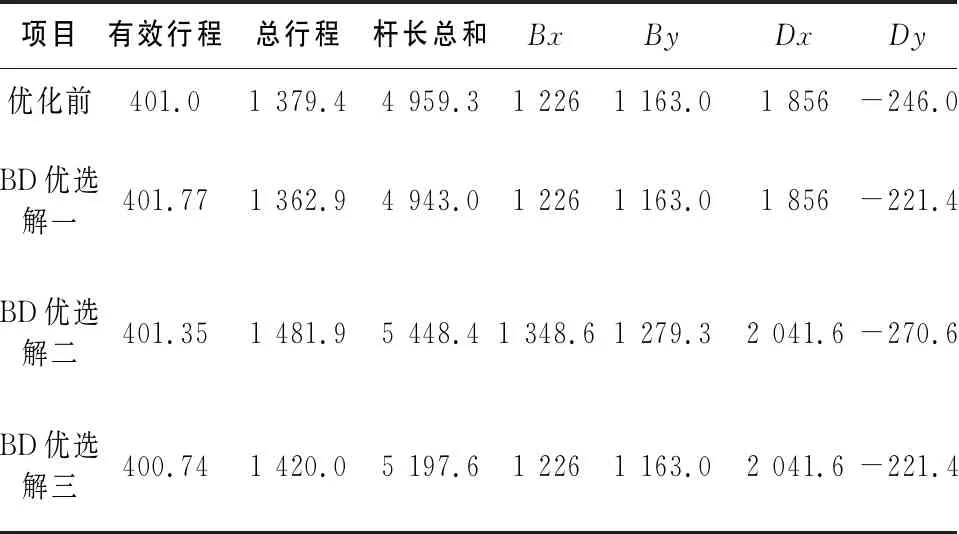
表3 B、D兩點(diǎn)四變量優(yōu)化最優(yōu)解一 單位:mm
由表3可知,本次針對B、D的優(yōu)化未能顯著增大有效行程。
2) 基于“AFG解二”參數(shù)優(yōu)化
基于AFG優(yōu)選解二,進(jìn)一步對C、E點(diǎn)進(jìn)行優(yōu)化,考察BC、CD、AE、DE桿長總和,獲得81組候選解,從中可獲得兩組優(yōu)選解。在“總行程≥1200”的前提下,“有效行程”最大,稱為“CE優(yōu)選解二”。在“總行程≥1200”的前提下,以“有效行程/(桿長總和-最小總和)”為指標(biāo)進(jìn)行降序排列,該指標(biāo)最大者,稱為“CE優(yōu)選解三”。本次針對C、E進(jìn)行優(yōu)化后的最優(yōu)解如表4所示。
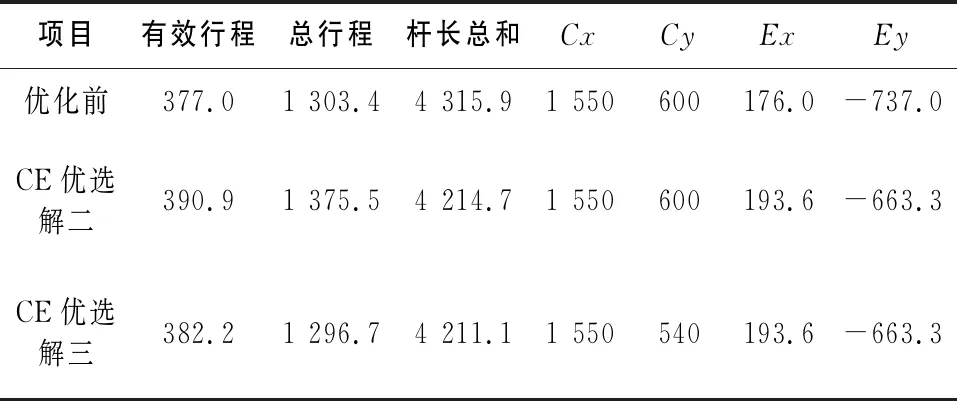
表4 C、E兩點(diǎn)四變量優(yōu)化最優(yōu)解二 單位:mm
總體而言,本次針對C、E兩點(diǎn)的優(yōu)化未能使有效行程顯著增大。取有效行程最大的“CE優(yōu)選解二”進(jìn)行B、D的優(yōu)化。
對于表4中的CE優(yōu)選解二,進(jìn)一步對B、D點(diǎn)進(jìn)行優(yōu)化,考察AB、BC、CD、DE桿長總和,獲得81組候選解。其中,有12組候選解的“有效行程”大于優(yōu)化前,且“總行程”>1200mm,但所有候選解有效行程均未達(dá)到400mm。
c)敏感參數(shù)優(yōu)化
綜合上述主運(yùn)動(dòng)鏈、第二運(yùn)動(dòng)鏈的優(yōu)化過程可見,有效行程對Ay、Fx、Fy、Cy、Ex靈敏度較高。在上述優(yōu)化結(jié)果的基礎(chǔ)上,再對上述5個(gè)變量進(jìn)行優(yōu)化,獲得243組候選解。其中,符合總行程及有效工作行程要求的結(jié)果如表5所示。

表5 敏感參數(shù)優(yōu)化最優(yōu)解 單位:mm
根據(jù)表5,取ACEF優(yōu)選解為:Ay=261.36、Cy=594、Ex=174.24、Fx=-456.84、Fy=-930.6。有效行程最大為443.0821mm,相應(yīng)總行程為1246.489mm。
3 優(yōu)化結(jié)果分析
綜合上述主運(yùn)動(dòng)鏈、第二運(yùn)動(dòng)鏈及敏感參數(shù)優(yōu)化的結(jié)果,獲得針對八連桿機(jī)構(gòu)的四步優(yōu)化結(jié)果如表6所示。
由表6可見,優(yōu)化前八連桿機(jī)構(gòu)的總行程為1246.7mm,有效行程為318.6mm。在針對主運(yùn)動(dòng)鏈進(jìn)行的A、F、G優(yōu)化中,有效行程顯著增大至392.7mm,總行程僅略有增加,桿系總長也僅略有增加。在針對第二運(yùn)動(dòng)鏈C、E、B、D優(yōu)化中,有效行程、總行程均進(jìn)一步略有增大。
在針對敏感參數(shù)A、C、E、F的優(yōu)化中,總行程減小至與優(yōu)化前幾乎相同,而有效行程則進(jìn)一步顯著增加,最終相比于優(yōu)化前增加了124.5mm,提升了39%。

表6 四步優(yōu)化結(jié)果對比
4 結(jié)語
本文針對壓力機(jī)的八連桿機(jī)構(gòu)進(jìn)行了桿長尺寸優(yōu)化設(shè)計(jì),獲得了滿足總行程、有效工作行程及有效工作行程內(nèi)相應(yīng)速度要求的機(jī)構(gòu)尺寸。
優(yōu)化后,相應(yīng)關(guān)節(jié)的位置坐標(biāo)為:O(0,0)、A(-125,261.36)、B(1226,1163)、C(1550,594)、D(1856,-246)、E(174.24,-663.7)、F(-456.84,-930.6)、G(0,-2017)。八連桿機(jī)構(gòu)各桿長度參數(shù)圓整為:OA=290mm,AB=1625mm,BC=655mm,CD=895mm,DE=1735mm,AE=975mm,AF=1150mm,F(xiàn)G=1240mm;∠EAF=33°,∠BCD=170°。優(yōu)化前、后桿系總長及滑塊總行程基本不變,但有效行程增大了39%。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
