全源礦井定位:一種智能煤礦位置服務新范式
2021-01-26 03:21:10胡青松錢建生李世銀孫彥景張朕
工礦自動化 2021年1期
胡青松, 錢建生, 李世銀, 孫彥景, 張朕
(1.中國礦業大學 地下空間智能控制教育部工程研究中心,江蘇 徐州 221116;2.中國礦業大學 信息與控制工程學院,江蘇 徐州 221116;3.中國礦業大學 徐州市智能安全與應急協同工程研究中心,江蘇 徐州 221116;4.青島松靈電力環保設備有限公司,山東 青島 266300)
0 引言
礦山動目標定位系統能夠確定人員、機車、災害源等感興趣目標的坐標位置,進而為煤礦智能化建設提供豐富的基于位置的服務[1]。當前,礦井定位系統一般采用單一定位技術[2],如WiFi定位、UWB(Ultra Wide Band,超寬帶)定位等。單一礦井定位系統完全依賴于定位系統本身,拓撲清晰,建設容易,但是難以做到全覆蓋,且精度提高困難。為此,不少學者提出了組合定位方法,將多種定位技術組合起來,如將慣性導航與WiFi組合,在沒有WiFi覆蓋的區域使用慣性導航繼續提供定位服務,在有WiFi覆蓋的區域利用WiFi系統為慣性導航系統提供校準服務,降低慣性導航的累計誤差。
然而,組合礦井定位系統在實際應用中仍面臨諸多困難。被組合對象是固定的,無法根據場景和需求變化自適應地進行最優組合。以慣性導航與WiFi組合定位為例,其組合對象一直是慣性導航和WiFi這2種定位系統,即使應用場景中有蜂窩通信系統、ZigBee系統,也無法成為被組合的對象。另外,仍沒有解決全覆蓋難題,如慣性導航與WiFi組合定位,在沒有這2種設備的定位場景中無法完成定位工作。
事實上,礦井中很多資源可被用來進行定位或者為定位系統提供輔助,如監控攝像機、超聲波系統,甚至振動監測、溫度監測、風速監測、災害監測等系統的傳感設備皆對提高定位性能大有裨益。此外,隨著無人機和機器人在井下普遍應用,必然為目標定位帶來更多機會[3]。將這些可能的手段通過人工智能方法按需組合,有望大幅提升定位系統的覆蓋范圍,為用戶提供精度更高、服務更優的全源定位。本文闡述全源礦井定位的理論構想,分析全源礦井定位的系統結構、關鍵技術和實現途徑,為智能礦山的研究和實踐提供借鑒和助力。
1 全源礦井定位系統結構
本節通過分析單一礦井定位系統的劣勢,引出全源礦井定位系統結構,并闡述全源礦井定位的可用傳感設備、定位屬性值、全源定位服務器等核心組成部分。
1.1 單一礦井定位系統
目前,幾乎所有礦井定位系統均采用如圖1所示的結構[2],主要包括定位標簽、定位信標、傳輸網絡、定位服務器4個部分。
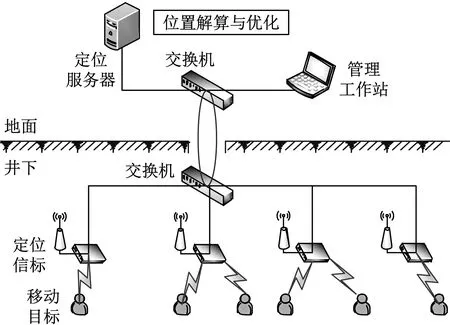
圖1 單一礦井定位系統結構
定位標簽由被定位人員攜帶或安裝在待定位設備上,其坐標未知,是需要定位的目標對象,簡稱目標節點。定位信標是位置已知的節點,也稱為定位基站,為定位系統提供參考位置,簡稱信標節點或錨節點。
定位信標與定位標簽之間采用超寬帶、ZigBee、藍牙、WiFi、可見光等無線通信方式交互消息,通過測量RSSI(Received Signal Strength Indicator,接收信號強度指示)、AOA(Angle of Arrival,到達角度)、TOA(Time of Arrival,到達時間)、TDOA(Time Difference of Arrival,差分到達時間)、PDOA(Phase Difference of Arrival,差分到達相位)等獲得信標與標簽之間的距離。
傳輸網絡將測得的距離信息傳輸到定位服務器,由定位服務器通過定位算法解出目標位置,并將定位結果傳輸給感興趣的對象(包括被定位目標)。傳輸網絡一般采用礦井原有的工業以太網。
單一礦井定位系統具有以下劣勢。
(1)定位信標與定位標簽之間大多采用單一(如UWB)或組合(如WiFi+捷聯慣導)通信技術,結構不靈活,覆蓋范圍受限,魯棒性不高,定位精度有限。
(2)通常使用單一(如RSSI)或組合(如TOA+AOA)測距技術,無法根據使用場景的不同自適應選擇最優測距技術。
(3)位置求解算法是固定的,無法根據使用場景和信號變化自適應選擇最優求解算法。
1.2 全源礦井定位系統
全源礦井定位系統利用目標場景中所有可用的定位設備和環境條件進行定位。它綜合了多種定位設備、多種信號類型和使用場景特征,能夠自適應地從可用的測距算法、位置解算算法、結果優化算法中選擇最優的算法組合,為用戶提供該時刻、該場景的最優定位解決方案,有望從根本上解決單一礦井定位系統的弊端。
全源定位根據定位環境、目標承載平臺的變化,智能、自動地添加新節點或移除舊節點[4],動態計算當前場景下最優的目標位置,其結構(圖2)與單一礦井定位系統相比,主要差別有:① 將單一礦井定位系統中的定位信標擴展為全源定位中的可用定位源。② 定位服務器的功能從單一礦井定位系統中簡單的位置解算與優化,擴展為全源礦井定位系統中的環境識別與最優設備組合、自適應融合與最優定位、智能煤礦目標位置服務。
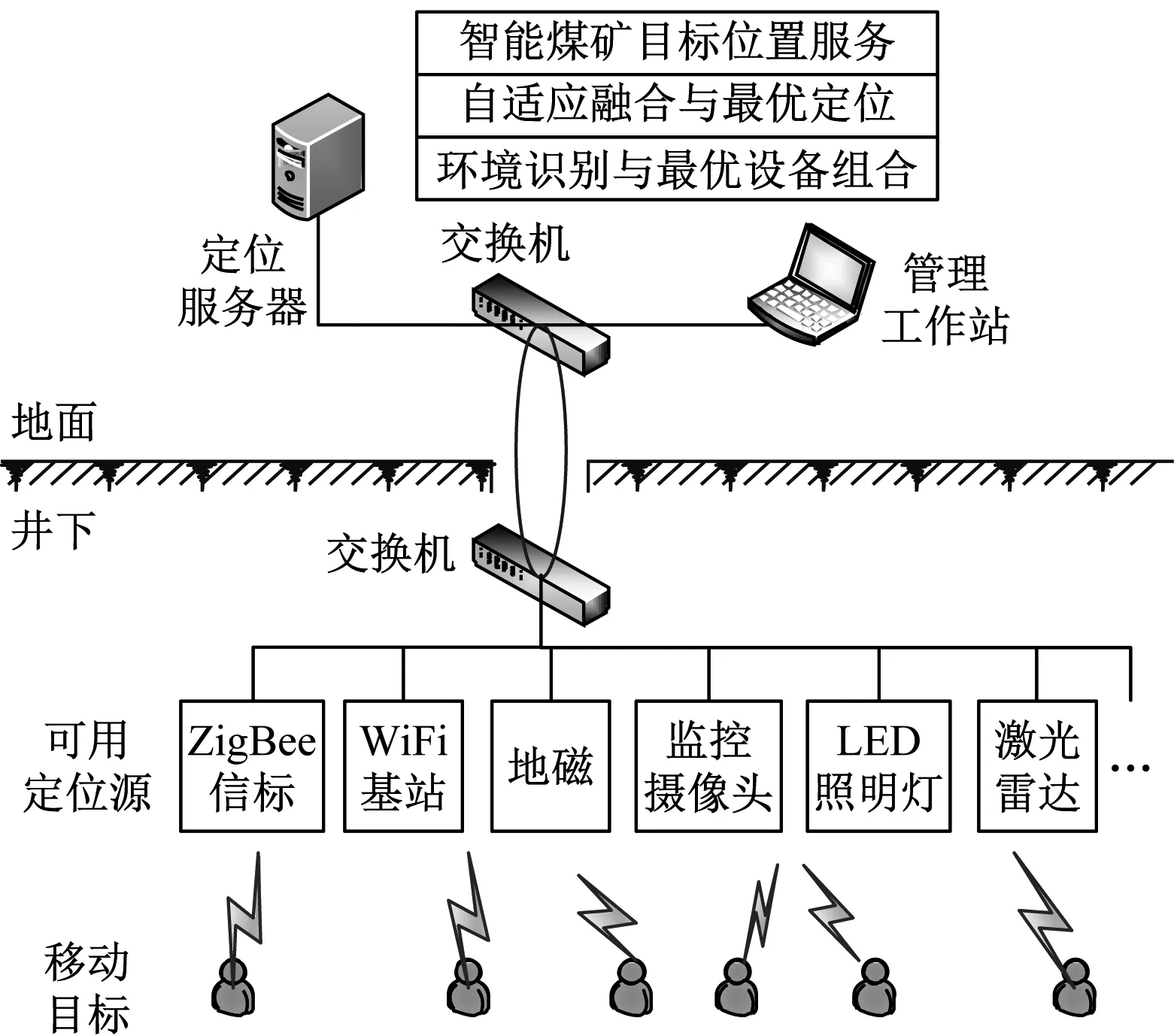
圖2 全源礦井定位系統結構
接下來針對單一礦井定位系統與全源礦井定位系統的兩大差別分別予以論述,先討論可用定位源。礦井中可用于定位信號測量的傳感設備主要有信號強度測量模塊、角度測量模塊、時間測量模塊、相位測量模塊、IMU(Inertial Measurement Unit,慣性測量裝置,包含3個單軸加速度計和3個單軸陀螺儀)、加速度計、陀螺儀、計步器、計時器、氣壓計、磁強計、風速計、溫度計、激光雷達、毫米波雷達、聲學傳感器、紅外傳感器、可見光LED、監控攝像機、光流計、視覺里程計等。這些傳感設備可固定安裝在巷道中,或以機車、機器人、無人機為承載平臺,亦可由人員攜帶。
測量的屬性值包括RSSI、DOA、TOA、TDOA、PDOA、速度、加速度、步數、氣壓、磁場強度、溫度、視覺信號等。還可利用數據庫匹配增強定位能力,數據庫信息可包含巷道地圖、設備安裝位置、標定影像、掘進進尺、割煤刀數等。
比如文獻[5]構建了一個用于無人機的全源定位導航數據集,用到的傳感器包括基本傳感器(IMU模塊、氣壓計、GPS模塊)、全源探測傳感器(光流計、雙目相機、超聲波傳感器、深度相機、激光雷達),以及室內真值提供裝置Vicon和室外真值提供裝置RTK(Real-time Kinematic)。數據集可用在SLAM(Simultaneous Localization and Mapping,同時定位與地圖構建)、三維模型重建、障礙物躲避和無人機狀態估計4種場景中。
接下來探討單一礦井定位系統和全源礦井定位系統在定位服務器方面的功能差異。由于全源定位必須具有環境適應能力和按需組合定位源的能力,所以要求全源礦井定位系統具有環境識別能力,能夠根據目標節點所處的環境條件選擇最優的定位傳感器組合進行定位信息采集[6],這被稱為環境識別與最優設備組合能力。為此,要求全源礦井定位系統具有自適應最優配置與即插即用能力[7],可通過設計基于多源異構信息融合的自適應調節準則來實現,在此基礎上進行最優定位,這被稱為自適應融合與最優定位能力。為實現上述功能,需要攻克諸多關鍵技術,如定位傳感器在線誤差建模與評估、定位系統智能容錯處理模型、統一的傳感器接口(軟硬件接口)、統一的時空標準、定位數據實時融合與濾波等。
例如,可通過基于因子圖的方法融合不同類型傳感器數據[8],通過將每個傳感器測量值編碼為1個因子[9],為定位系統提供自適應的、可插拔式傳感器融合架構。在求解時,采用基于滑動窗口的增量平滑技術以降低計算量[10],先通過短期平滑器估計滑動窗口上的狀態,再通過長期平滑器計算包括環閉合約束在內的整個非線性問題的最優解。
值得注意的是,在進行最優定位傳感器選擇、最優定位信息融合與最優位置求解時,均需從具體應用場景進行考慮,并不是精度越高越好,因為更高的精度通常意味著更大的代價。對于無人采煤、無人駕駛等需求,定位精度通常需要達到厘米級;而對于工作調度中的人員定位,通常米級精度即可滿足需求。
2 全源礦井定位關鍵技術
全源礦井定位是一種全新的定位模式,有大量關鍵技術亟需攻關,這里僅選擇其中最為關鍵的3項予以探討。首先,全源定位必須具有統一定位框架,用以整合不同廠家、不同技術、不同設備、不同地點的潛在定位設備,并能按需融入新技術和新方法,以解決環境自適應的問題。然后,需要解決定位信息的融合處理問題,即如何收集、傳輸和處理位置特征信號,并實現異構數據的融合。最后,定位系統本身是與通信系統密切協同的,全源定位需要考慮通信定位一體化設計,借以提高定位性能和降低系統成本。
2.1 統一定位框架技術
定位系統的位置解算一般有分布式和集中式2種方案。分布式方案依靠通信網絡,在上層實現數據融合處理和定位,圖1和圖2均采用這種方案。集中式方案則依靠定位終端本身進行處理,要求定位終端能夠處理多種定位信息源[11]。礦井定位中分布式方案應用更為廣泛。
全源定位不但需要考慮當前的可用設備和技術,還要能夠接入將來可能出現的新設備和新技術,因此理想的全源定位框架應具有模塊化、組合式、可擴充的特征。具有模塊化特征意味著定位系統的組件在研發設計時無需從零開始,而是可以如同搭積木一樣按需構建;具有組合式特征意味著定位可以從模塊庫中按需選擇組件,構建最適合當前場景、當前需求的定位系統;具有可擴充特征意味著定位系統的結構是開放的,可以根據技術發展納入新組件和新功能。
基于模塊化、組合式、可擴充的要求,筆者提出了如圖3所示的全源礦井定位框架[12],其包括定位信號測量設備、距離求解算法庫、位置解算算法庫、融合定位引擎、定位結果優化算法庫、定位數據庫、目標位置服務等可拆卸模塊。
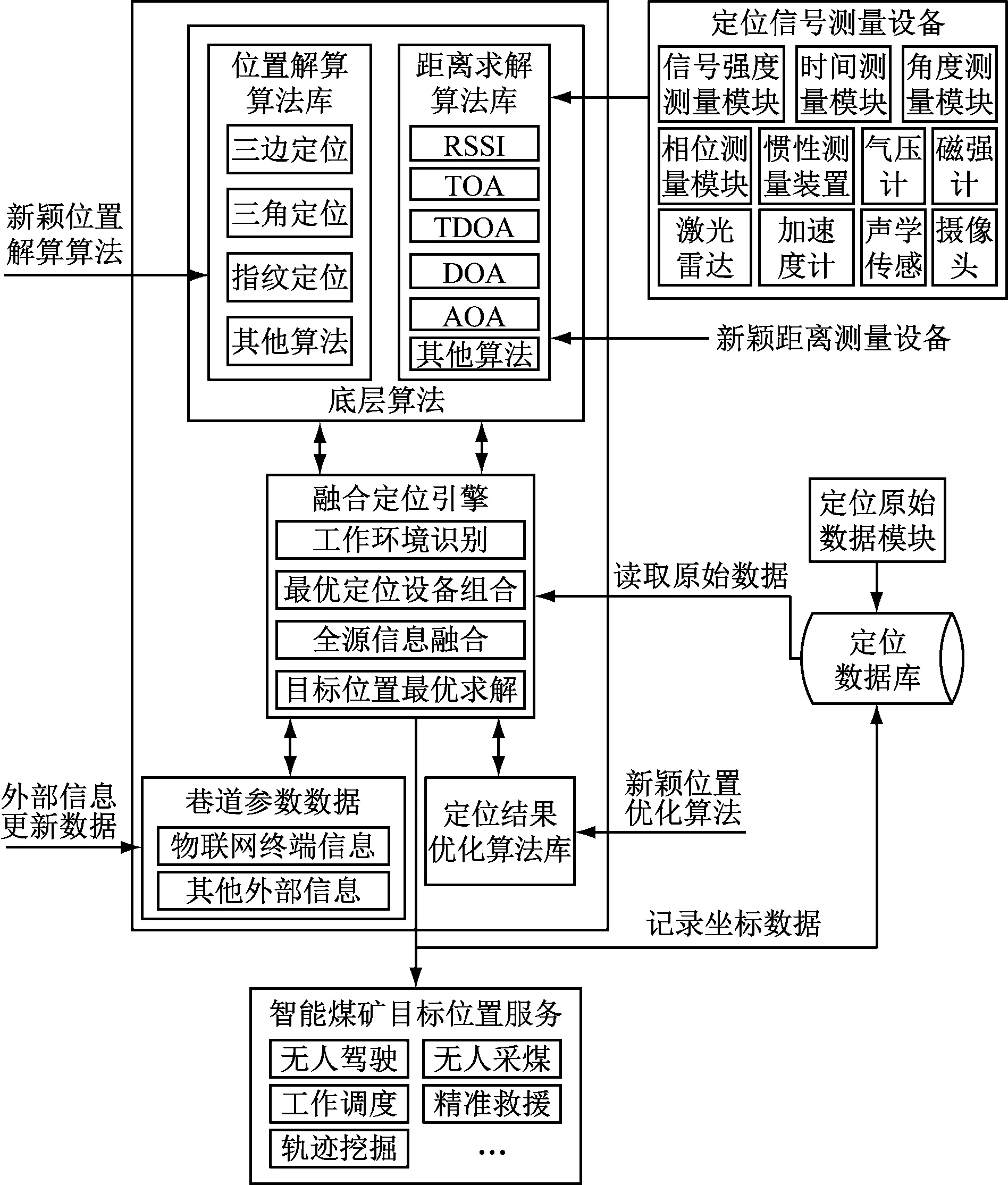
圖3 全源礦井定位框架
定位信號測量設備測量可用于計算距離的屬性值。距離求解算法庫包含了主流的距離求解算法[13],以測得的距離屬性值為輸入,根據屬性值類型和特征,選擇合適的1種或多種距離求解算法計算出節點之間的距離,將計算結果交付給位置解算算法庫。位置解算算法庫選擇合適的位置解算算法,計算出目標節點的當前位置。
在求解節點間距離和目標位置時,均需融合定位引擎的支持,它是全源定位框架的關鍵。融合定位引擎具有工作環境識別能力,進而從當前可用的定位信號測量設備中選擇最優設備組合,組成當前的目標定位系統。另外,融合定位引擎需要具有全源信息融合能力,既可對原始測量屬性值進行融合,也可對基于不同測量屬性值計算出的多個距離信息進行融合,或者對基于不同距離信息求解出的目標位置進行融合,用以求解出目標位置的最優解。
在進行環境識別時,可借助巷道參數數據(如巷道分叉、拐彎等)、物聯網終端信息等進一步提高識別準確度。在進行位置求解時,可借助定位數據庫(設備安裝位置、人員排班表、同類目標的歷史運動規律等)[14]進一步提高定位精度。求得目標精確位置后,可為礦井無人駕駛、無人采煤、精準救援等提供智能化的位置服務[1,15]。
2.2 全源定位信息融合技術
全源定位信息融合將不同來源的信息統一表達成便于定位系統使用的信息[16],它對測量屬性值進行有機組織,實現信息的融合共享,達到提高定位精度的目的。按照融合層級的不同,可分為數據級融合、特征級融合和決策級融合,常見的融合處理算法有加權平均、數理統計、選舉決策、最優狀態估計、機器學習等。
從融合處理算法中的數據流動過程看,可將全源定位信息融合分為靜態融合和動態融合[11]。對于靜態融合方法,如果先驗概率未知,可采用加權平均、最小方差等算法;如果先驗概率已知,可采用最大似然估計法。常見的動態融合方法有卡爾曼濾波、擴展卡爾曼濾波、無跡卡爾曼濾波、粒子濾波、基于因子圖的方法等。
從數據融合是否需要集中式處理看,可將全源定位信息融合分為集中式融合和分布式融合。集中式融合方法具有1個集中式信息融合中心,各傳感器測得的原始數據被傳輸到融合中心進行融合處理。在線性方差準則下,集中式融合方法可以得到全局最優估計,但是計算負擔會隨著傳感器數量的增多而快速增加,且子系統故障會對整個定位系統產生較大影響,甚至導致系統崩潰。分布式融合方法采用層次性融合策略,信息共享算法是分布式融合的關鍵,用于分配子系統的信息共享因素,確定各路本地融合結果在融合中心的置信度水平。分布式融合方法的典型代表是聯邦卡爾曼濾波[17],如圖4所示。每個參與融合的定位信號測量設備均有對應的子濾波器(采用卡爾曼濾波器),這些子濾波器獨立完成相關信息的更新[18]。主濾波器融合各子濾波器的結果,得到最終的優化定位結果。由于進行了本地狀態估計,所以大幅降低了融合中心的計算量,并克服了子系統故障傳遞對整個系統的影響。
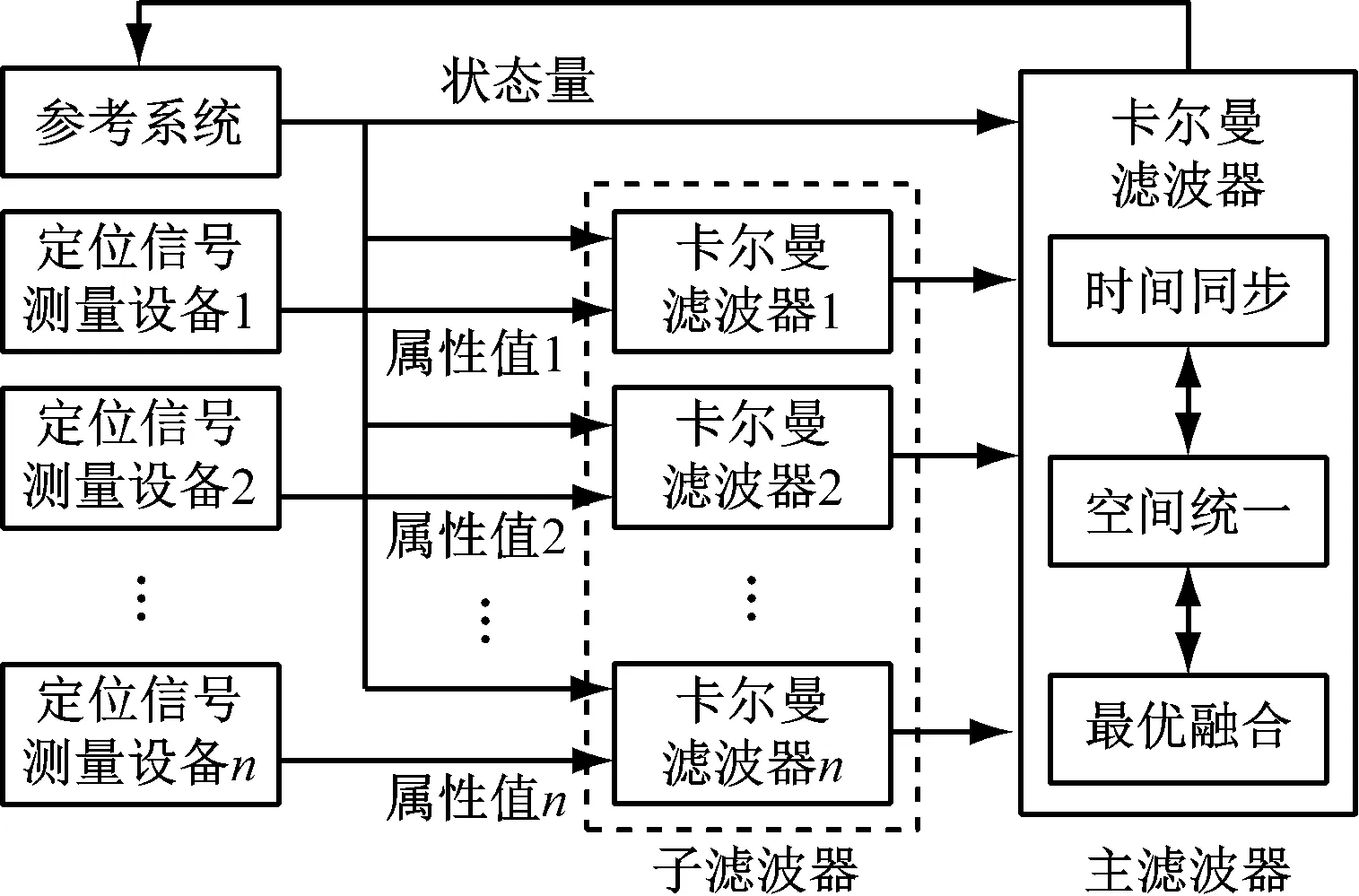
圖4 基于聯邦卡爾曼濾波的全源定位融合
2.3 通信定位一體化技術
通過同一個系統同時實現通信和定位功能,稱為通信定位一體化。主流的礦井無線通信系統幾乎都具有目標定位能力[19],比如蜂窩通信系統、廣播通信系統、透地通信系統可進行廣域定位,WiFi、藍牙、UWB可實現局域定位。然而,廣域通信系統并未針對定位進行專門設計,定位性能不高;局域通信系統雖然也未針對定位進行專門設計,但是得益于其信源密度高、信號作用距離短、部署靈活等優勢,往往具有更優的定位精度。隨著位置服務的作用越來越大,5G、藍牙5.0從設計之初就考慮了高精度定位問題,定位精度有了大幅提升。
通信定位一體化通常有2種實現方式:① 信號層面一體化,即在設計通信信號體制時就考慮了定位能力,實現了通信與定位的緊耦合,比如4G、5G、藍牙5.1等。② 算法層面一體化,即通信系統并未針對定位進行專門設計,只能通過上層算法提供定位能力,實現了通信與定位的松耦合,比如WiFi,2G,3G等。
目前,5G已成為智能煤礦建設的首選無線通信系統,它是一種典型的緊耦合式通信定位一體化技術,其大規模MIMO(Multi-Input Multi-Output,多輸入多輸出)、超高頻段、自適應波束成型等技術都對提高定位精度大有裨益。與4G相比,5G在定位方面具有如下優勢:① 定位參考信號進一步改進,信號測距能力大幅提升。② 定位參考信號在comb-6資源映射模式基礎上,增加了comb-2和comb-4,定位參考信號的配置靈活性進一步提升。③ 增加了定位參考信號的周期配置,可采用連續播發的模式播發定位參考信號,從而提高定位性能。④ 定位參考信號具有MIMO下的波束管理功能,使得5G具備測角能力。
在2019年召開的3GPP RAN1 #94b會議中,明確了室內外水平定位精度分別為3,10 m(80%),垂直定位精度為3 m(80%)。工業物聯網與車聯網對5G的定位要求更為嚴格,分別為0.2,0.1 m。在4G的E-CID(Enhanced Cell-ID,增強小區識別)、OTDOA(Observed Time Difference of Arrival,觀察到達時間差)和UTDOA(Uplink Time Difference of Arrival,上行到達時間差)基礎上[20],5G基站借助網絡的大帶寬和多波束優勢,進一步支持Multi-RTT(Multi-Round-Trip Time,多站往返時間)、UL-AOA(Up Link-Angle of Arrival,上行-到達角度)和DL-AOD(Down Link-Time of Arrival,下行-到達時間)等定位技術。
考慮到礦井中的UWB、藍牙、WiFi等定位系統已經較為成熟,可將5G技術與它們融合,以進一步提高定位性能。當前各種定位系統與5G的融合方案及其優缺點見表1[21],其中5G NR(New Radio,新空口)是一種構建在OFDM(Orthogonal Frequency Division Multiplexing,正交頻分復用)基礎上的全新空口方案。
3 智能煤礦全源定位實現途徑
智能煤礦建設是煤礦企業安全生產的內在需求,是保障國家能源安全穩定的重要舉措。以國家發展改革委、國家能源局等八部委聯合發布《關于加快煤礦智能化發展的指導意見》[22]為標志,“推動智能化技術與煤炭產業融合發展,提升煤礦智能化水平,促進我國煤炭工業高質量發展”已成為全社會共識。由于智能煤礦建設目前普遍采用“端-邊-云”模式,本文提出基于“端-邊-云”的全源礦井定位系統實施架構(圖5),以便與煤礦智能化進程相適應。
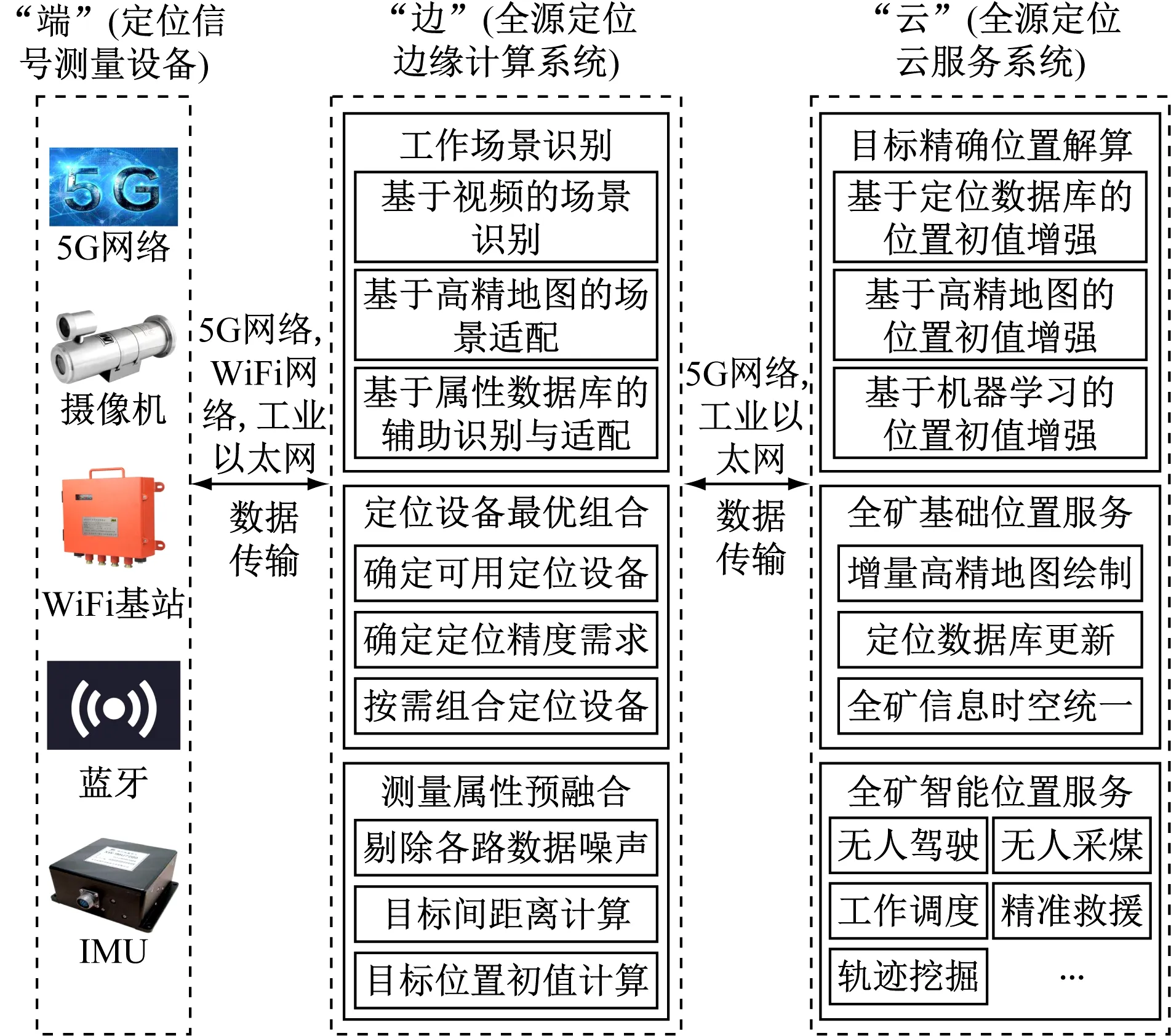
圖5 基于“端-邊-云”的全源礦井定位系統實施架構
“端”即定位信號測量設備,這里將5G網絡也作為定位系統“端”的一部分,因為5G網絡在提供大容量、高帶寬、低延時的數據傳輸服務的同時,也能夠提供逼近UWB的定位精度,所以基于“網絡即設備”和“網絡即服務”的思想,在有5G網絡覆蓋的巷道區域,借用5G網絡測量定位信息是智能煤礦時代全源定位的應有之義。比如,工作面已成為多數煤礦示范建設5G網絡和智能化應用的首選場景,可在工作面實現以5G、捷聯慣導、視頻監控等技術為基礎的全源定位,為少人/無人開采提供支撐。
“邊”是部署在目標節點附近、就近處理定位信息的邊緣服務器[23]。比如,可在每個綜采工作面和綜掘工作面分別部署1臺邊緣定位服務器,用以完成以下功能。
(1)識別待定位節點的工作場景。主要手段有基于監控攝像機視頻的場景識別、基于礦井巷道高精地圖的場景適配、基于屬性數據庫的輔助識別與適配。
(2)根據工作場景進行定位設備的最優組合。首先,確定當前場景有哪些可用定位設備;然后,根據當前場景的性質和用戶的需求,確定合適的精度等級;最后,從可用定位設備中選擇能夠滿足用戶精度需求的設備組合。
(3)進行測量屬性預融合并得到初步定位結果。主要操作包括:① 利用卡爾曼濾波等工具濾除數據噪聲。② 利用去噪后的數據計算節點間距離,這些距離絕大多數是信標節點與目標節點之間的距離,如果用到D2D(Device to Device,設備到設備)協同定位策略,還包括移動終端與移動終端之間的距離。③ 根據得到的距離計算目標節點位置,作為初步定位結果。若該結果滿足應用需求,直接使用該結果,否則將定位初值和濾波后數據傳輸到云服務器做進一步增強處理。
“云”是用于對礦井目標進行增強定位并提供基于位置的智能服務的中心平臺[24]。全源定位云服務系統至少需具有以下功能:
(1)在邊緣定位服務器的基礎上求解移動目標的精確位置。主要手段有基于定位數據的位置初值增強、基于高精地圖的位置初值增強和基于機器學習的位置初值增強。前2種手段主要依賴于場景匹配,基于機器學習的手段利用人工智能領域的最新成果[25],通過深度學習、支持向量機等方法提高定位精度。
(2)為全源定位系統和智能煤礦集控平臺提供基礎位置支撐。主要包括:增量高精地圖繪制,即根據當前的定位結果,不斷擴充、修正礦井高精地圖;及時更新用于支持全源定位的屬性數據,確保邊緣服務器和云服務器的可靠工作;對全礦信息進行時空校準,保證時間同步和空間統一。
(3)提供基于精確位置和基礎服務的全礦智能位置服務,具體可參考文獻[1]。
4 結論
(1)單一礦井定位系統的定位信標與定位標簽之間采用單一通信技術和單一測距技術,其位置解算算法在系統建設好之后固定不變。組合礦井定位系統雖可采用2種或多種定位技術,但是被組合對象和位置求解算法依然固定不變。
(2)礦井中除了已建設好的專用定位系統之外,還有很多可用于定位的資源,如監控攝像機、超聲波系統、振動監測傳感器、可見光LED等。全源礦井定位將這些可能手段按需組合,有望大幅提升礦井定位系統的靈活性、可擴充性、覆蓋范圍和定位精度。
(3)全源礦井定位亟需解決場景識別、組合式統一定位框架、全源定位信息融合和通信定位一體化等技術難題,采用與智能煤礦主流建設模式相適應的“端-邊-云”建設方式,充分借助礦用5G等最新建設成果,推進全源礦井定位落地實施,助力智能煤礦建設。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
工業設計(2016年12期)2016-04-16 02:52:00
