改進的井下人員定位PDR算法研究
2021-01-26 03:39:48孫延鑫毛善君蘇穎楊夢
工礦自動化 2021年1期
孫延鑫, 毛善君, 蘇穎, 楊夢
(1.北京大學 地球與空間科學學院,北京 100871;2.中國礦業(yè)大學(北京)機電與信息工程學院,北京 100083)
0 引言
近年來,煤礦井下人員定位技術(shù)取得了長足進步。井下環(huán)境復雜,除了采用傳統(tǒng)的UWB,WiFi等借助外部信號實現(xiàn)定位的技術(shù)之外,在沒有外部信號的環(huán)境下需要通過基于步長估計的PDR(Pedestrian Dead Reckoning,行人航位推算)算法[1]進行輔助定位。PDR算法通過對行人進行步頻檢測、步長估計和航向估計來推斷行人的位置信息。基于PDR算法的人員定位技術(shù)不受井下通信多徑效應(yīng)影響,不依賴外界信息,僅通過載體運動狀態(tài)即可計算出行人位置信息,非常適合在井下巷道環(huán)境中應(yīng)用[2]。然而采用PDR算法進行定位的過程中,步頻檢測、步長估計和航向估計3個階段的姿態(tài)誤差隨時間的累計導致位置誤差逐漸增大[3]。目前大多采用零速校正[4]、航向漂移消除[5]、步態(tài)信號優(yōu)化等方法來修正誤差[6],但行人運動姿態(tài)的差異性及PDR算法中3個階段的固有缺陷,導致定位精度仍有待提高。借助外部信號(如WiFi[7]、藍牙信標[8]、人體肌電信號[9]、可見光[10]等)來提高PDR算法的定位精度也是常用的誤差修正方式,但上述方法主要通過已有指紋庫或在特定坐標位置修正定位誤差,并未改變PDR算法的底層實現(xiàn)方式。
本文通過改進PDR算法的步頻檢測方式,得到適應(yīng)步長估計階段的輸入特征,并引入深度RNN(Recurrent Neural Network,循環(huán)神經(jīng)網(wǎng)絡(luò))模型進行步長估計,解決了傳統(tǒng)PDR算法累計誤差偏大的問題,提高了井下人員定位精度。
1 PDR算法原理
1.1 步頻檢測
步頻檢測是通過識別行人步態(tài)周期來確定行人行走1步的時間,起簡易計步器的作用[11]。基本的步頻檢測方法有峰值檢測法、過零檢測法等[12]。以峰值檢測法為例,為使運動周期更為明顯,采用邁步過程中人的能量作為衡量標準計算步頻。能量E定義為各個方向加速度(即三軸加速度ax,ay,az)的平方和。
(1)
設(shè)置能量的波峰、波谷閾值,以能量從增到減并第1次大于波峰閾值或從減到增并第1次小于波谷閾值為判斷條件,實現(xiàn)步頻檢測。
1.2 步長估計
步長估計階段通過分析行走特征(如行人身高、速度、步頻等)建立模型來估計步長。傳統(tǒng)的步長估計模型有靜態(tài)和動態(tài)2種[13]。靜態(tài)模型中步長為定值,不隨加速度的變化而變化;動態(tài)模型是在行人行走過程中的1個加速度周期內(nèi),利用加速度峰谷值之差adif,結(jié)合先驗數(shù)據(jù)得到第i步步長li,即
(3)
式中β為比例因子,定位前由先驗數(shù)據(jù)經(jīng)過最小二乘擬合得到。
1.3 航向估計
本文采用手機內(nèi)置的磁力計和陀螺儀計算航向角[14]。
(4)

2 改進的井下人員定位PDR算法
傳統(tǒng)PDR算法步長估計階段常用的靜態(tài)或動態(tài)模型無法有效解決行人行走時因姿態(tài)不同導致的計算誤差。因此,本文對傳統(tǒng)PDR算法進行了改進,主要包括采用改進的峰值檢測法檢測步頻、建立深度RNN模型估計行走步長,并將改進算法用于井下人員定位。
定位原理如圖1所示。首先根據(jù)手機加速度傳感器、陀螺儀、磁力計獲取行人運動實時數(shù)據(jù);然后采用改進的峰值檢測法計算規(guī)定時間間隔內(nèi)的步頻數(shù)據(jù),并與其他數(shù)據(jù)輸入訓練后的深度RNN模型[15]進行步長估計;最后結(jié)合估計的航向角預(yù)測行人當前位置。
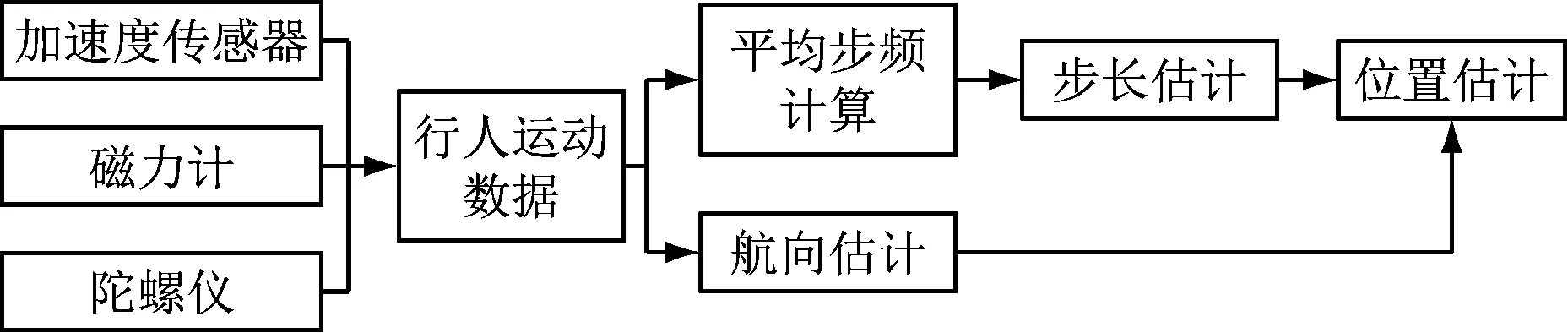
圖1 井下人員定位原理
2.1 基于改進峰值檢測法的步頻檢測
傳統(tǒng)的峰值檢測法設(shè)定一個固定閾值,當加速度峰值超過閾值時步數(shù)累加。然而人體在運動過程中并非處于絕對的勻速行進狀態(tài),每一完整步態(tài)區(qū)間內(nèi)的加速度峰值不是固定的。另外,考慮到傳感器數(shù)據(jù)獲取頻率太高,為減少計算次數(shù),提高定位效率,采用固定時間間隔內(nèi)的平均步頻數(shù)據(jù)及對應(yīng)時間間隔內(nèi)的加速度方差進行步長估計。
為得到上述數(shù)據(jù),對傳統(tǒng)的峰值檢測法進行改進。相應(yīng)的步頻檢測流程如圖2所示。判斷當前獲取的能量是否為極值后,根據(jù)一定時間間隔內(nèi)的合理性排除偽波峰或偽波谷,并繼續(xù)判斷與前一極值的方向一致性,以保證使用真實極值實現(xiàn)步頻檢測。
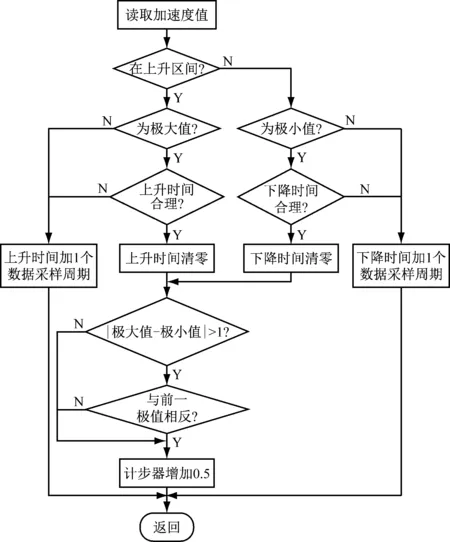
圖2 步頻檢測流程
2.2 基于深度RNN的步長估計
RNN是一種反饋神經(jīng)網(wǎng)絡(luò),在其處理單元之間既有內(nèi)部的反饋連接,又有前饋連接,能夠很好地處理時間序列數(shù)據(jù)。一個典型的RNN結(jié)構(gòu)如圖3所示,其節(jié)點之間的連接形成沿序列的有向圖[15]。U,V,W均為各變換的權(quán)值;St為t時刻隱藏層的值;Xt,Ot分別為t時刻的輸入和輸出。t時刻的輸出既與當前輸入有關(guān),也與上一時刻的記憶有關(guān)。在RNN隱藏層中每一個單元都在信息傳遞過程中篩選記憶,并將記憶信息傳遞給下一時刻的數(shù)據(jù)單元。
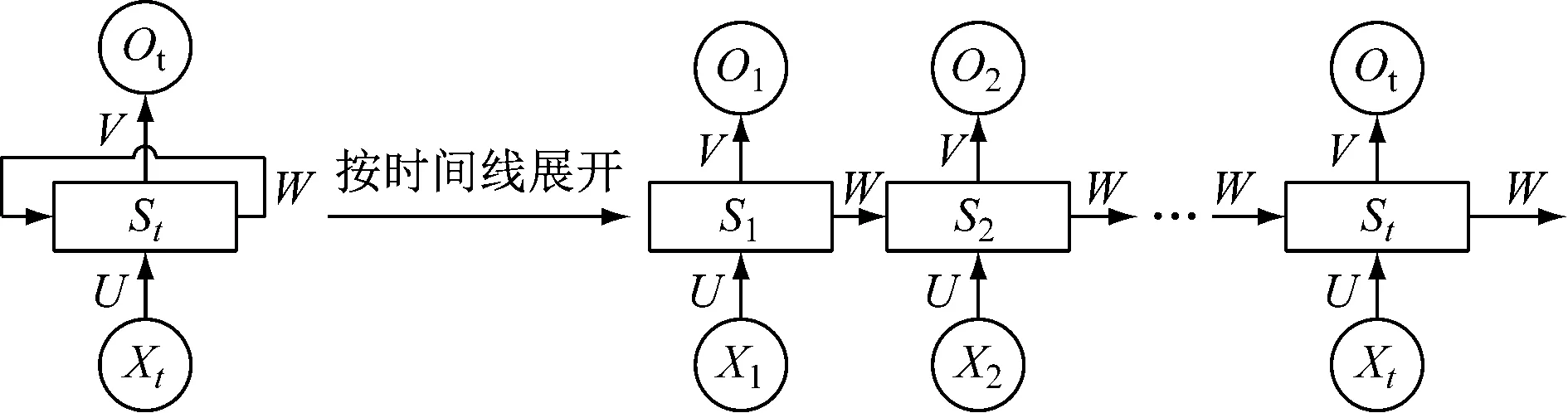
圖3 RNN結(jié)構(gòu)
本文采用深度RNN進行步長估計,其由1個輸入層、3個RNN層和2個全連接層構(gòu)成,如圖4所示。當前RNN層的輸出作為下一個RNN層的輸入,輸入層與一個全連接層共同實現(xiàn)輸入數(shù)據(jù)特征提取,另一個全連接層輸出一維列向量,為各時刻預(yù)測值。
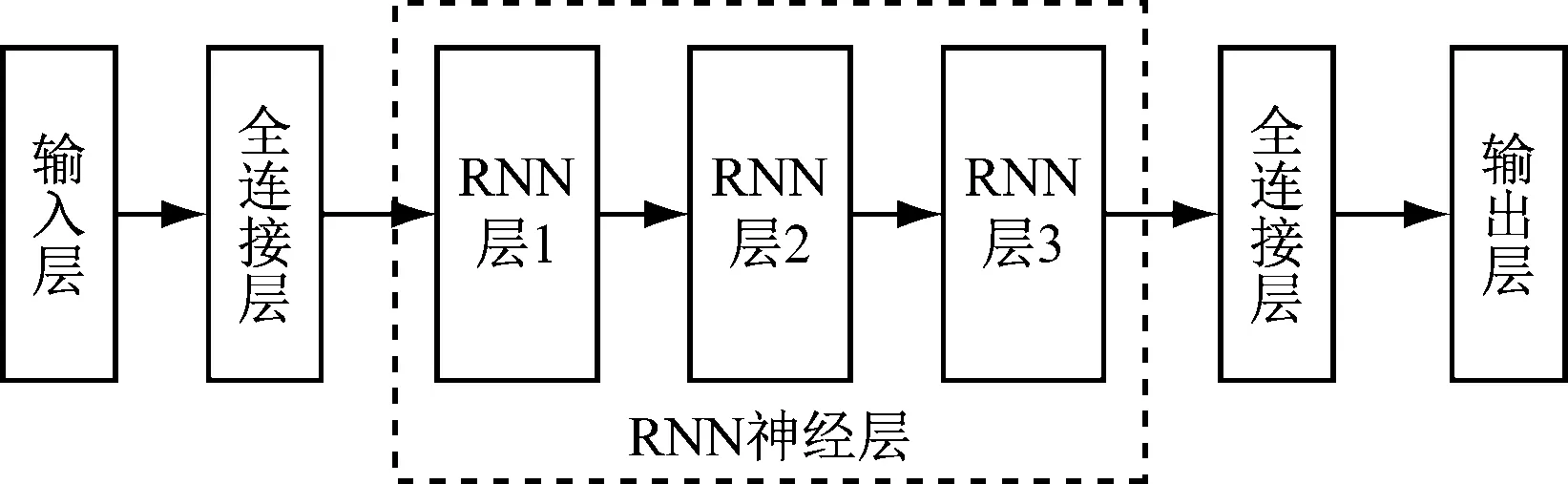
圖4 深度RNN結(jié)構(gòu)
隱藏層激活函數(shù)選擇ReLU函數(shù)。該函數(shù)將小于0的部分輸出為0,大于0的部分輸出原值,為隱藏層引入稀疏表達特性,且求導計算量小,加快了RNN收斂速度。
RNN損失函數(shù)選擇平均絕對誤差函數(shù)。該函數(shù)不考慮誤差方向,避免了誤差相互抵消問題,可準確反映實際預(yù)測誤差。
3 試驗與結(jié)果分析
為驗證改進的井下人員定位PDR算法的可行性與應(yīng)用效果,在河南某大型煤礦進行試驗。試驗分2個部分:① 在煤礦內(nèi)空地采集原始數(shù)據(jù),模擬礦工井下行走姿態(tài),獲得相關(guān)參數(shù),以獲取步長估計深度RNN模型。② 在井下進行現(xiàn)場試驗。
3.1 步長估計深度RNN模型建立
3.1.1 原始數(shù)據(jù)采集
研究發(fā)現(xiàn),行人的步長與步頻、加速度方差等聯(lián)系緊密[16],因此采集的原始數(shù)據(jù)為行走過程中的加速度和規(guī)定時間間隔內(nèi)的實際行走距離。
為保證模型預(yù)測效果,采用防爆手機和激光測距儀同時采集原始數(shù)據(jù)。通過防爆手機的加速度傳感器獲得行人加速度數(shù)據(jù),根據(jù)激光測距儀的固定頻率獲得行人行走距離,并通過數(shù)據(jù)線將數(shù)據(jù)實時傳輸至電腦并存儲。采集原始數(shù)據(jù)時,被測對象手持手機(屏幕水平向上)置于胸前,沿激光測距儀激光所指方向直線往返行走。采集的原始數(shù)據(jù)見表1。
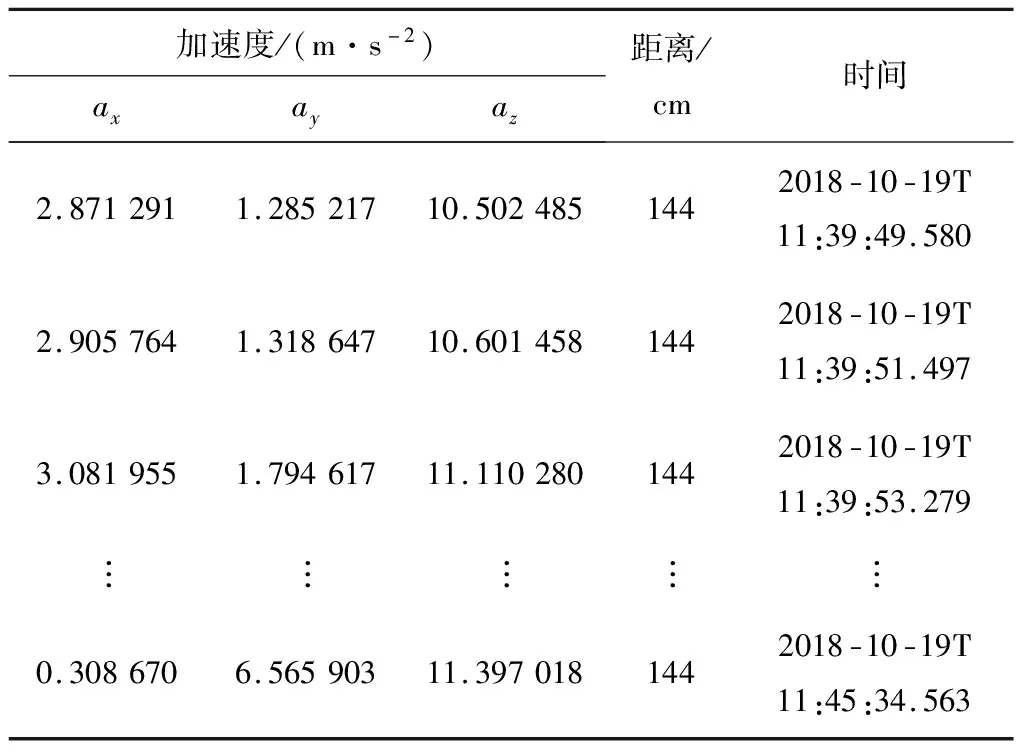
表1 采集的原始數(shù)據(jù)
3.1.2 步頻檢測
進行步頻檢測時,因數(shù)據(jù)采集過程中設(shè)備與行人之間存在相對運動或抖動,數(shù)據(jù)中的噪聲較大[17]。因此,利用Java語言,根據(jù)改進的步頻檢測流程編寫步頻估計函數(shù),配合均值濾波器對原始數(shù)據(jù)進行平滑操作,得到加速度傳感器指定時間間隔(2 s)內(nèi)的平均步頻,如圖5所示。根據(jù)加速度傳感器采集數(shù)據(jù),共獲得6 316個平均步頻數(shù)據(jù)。

圖5 部分平均步頻計算結(jié)果
3.1.3 步長估計
通過研究行人邁步特征發(fā)現(xiàn),ay平均值代表行人在邁步時能量的平均水平,ay方差反映行人在邁步過程中能量和加速度的差異程度[18]。因此,本文采用測距儀測距時間間隔及該時間間隔內(nèi)ay平均值、ay方差、平均步頻作為深度RNN模型的輸入特征。特征數(shù)據(jù)均為6 316個,除平均步頻(圖5)外,其他3項特征數(shù)據(jù)如圖6所示。
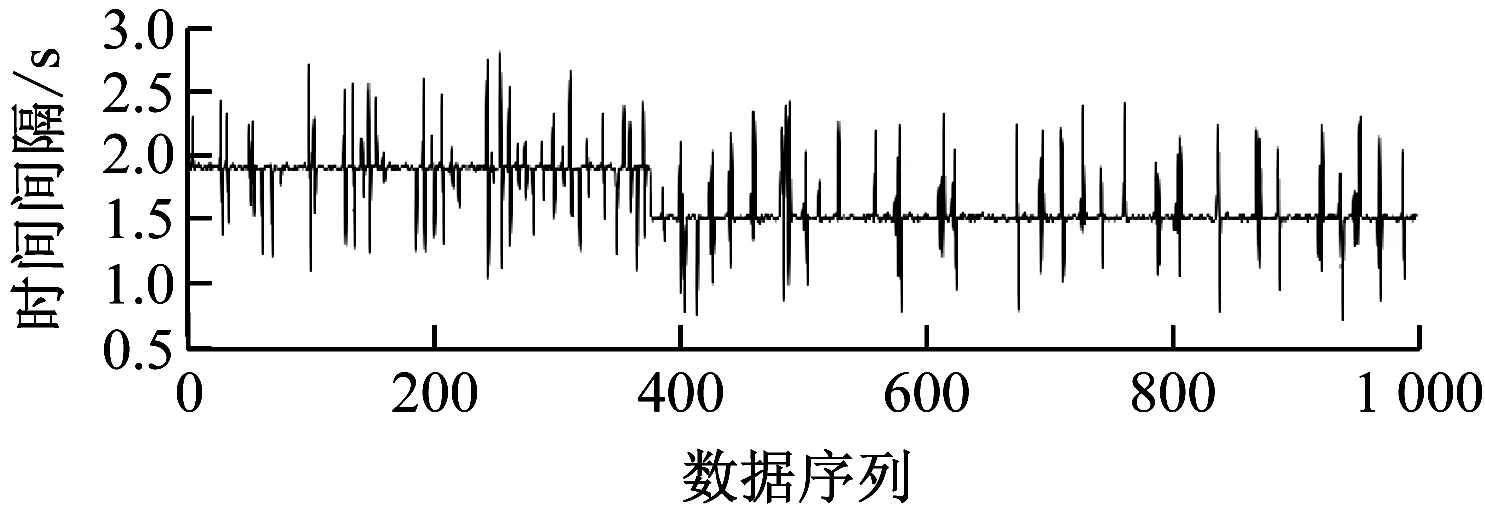
(a)時間間隔
在確立深度RNN模型的輸入特征、激活函數(shù)和損失函數(shù)后,將預(yù)處理后的數(shù)據(jù)隨機排序,將前4 500個數(shù)據(jù)作為訓練集,后1 816個數(shù)據(jù)作為測試集,將數(shù)據(jù)歸一化后輸入如圖4所示的深度RNN結(jié)構(gòu)中進行訓練。訓練過程中損失函數(shù)如圖7所示。可看出在模型訓練初期,損失函數(shù)下降較快,在100次訓練之后趨于平緩,并在400次訓練之后逼近0.009。
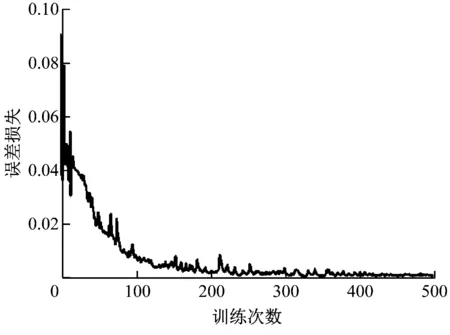
圖7 深度RNN模型訓練損失函數(shù)變化
將測試集輸入深度RNN模型,所得預(yù)測值如圖8所示。可看出深度RNN模型得到的預(yù)測值與真實值之間存在部分離群點不重合現(xiàn)象(如第250,500個點處),但整體重合度較高,誤差在0附近波動。對預(yù)測結(jié)果進行量化統(tǒng)計可得,測試集預(yù)測前進距離3 031.46 m,累計誤差為180.34 m,相對誤差為5.9%,表明深度RNN模型對步長估計效果較好。
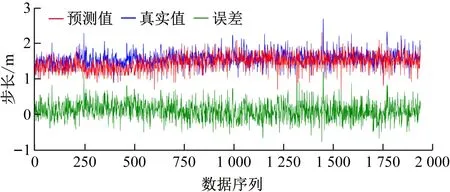
圖8 深度RNN模型步長預(yù)測結(jié)果
3.2 現(xiàn)場試驗
基于步長估計深度RNN模型,提出井下人員定位PDR算法,并在井下環(huán)境進行試驗,如圖9所示。試驗僅采用該算法進行定位導航,驗證其可行性與實際效果。
在提升副井和運輸巷附近進行3次測試,行進路線如圖10所示。路線1在提升副井附近,從副井口經(jīng)過2次直角轉(zhuǎn)彎到達運輸巷,長65.4 m;路線2在運輸巷與南一采區(qū)膠帶上山巷道交界處,長35.9 m;路線3位于運輸巷某避難硐室附近,從避難硐室行至運輸巷,最終到達工作面巷道,長255.4 m。測試時行人手持移動終端,按既定路線以穩(wěn)定姿態(tài)行走。
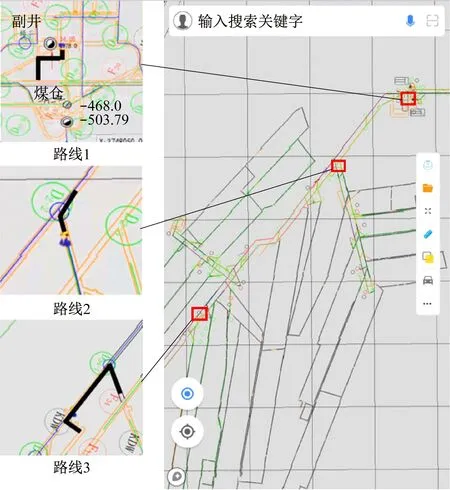
圖10 現(xiàn)場行進路線
試驗結(jié)果見表2。可看出3條路線的定位相對誤差均未超過3.9%,較文獻[19]中基于靜態(tài)模型的PDR算法定位誤差(14.6%)、文獻[20]中基于動態(tài)模型的PDR算法定位誤差(4%~6%)顯著減小。受制于PDR算法原理,試驗中產(chǎn)生的相對誤差隨行走距離的增加而不斷累計。
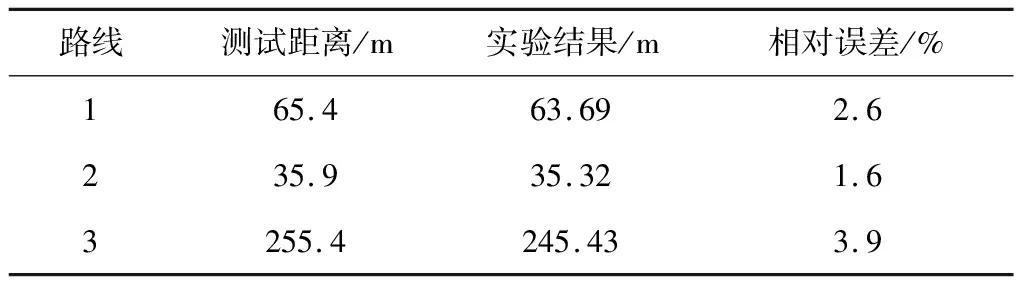
表2 現(xiàn)場試驗結(jié)果
上述試驗結(jié)果表明:改進的PDR算法步長預(yù)測更準確,用于井下人員定位時累計誤差較小,表明本文算法具有較好的實用性。
4 結(jié)論
(1)考慮人體在運動過程中每一完整步態(tài)區(qū)間內(nèi)的加速度峰值不固定的實際情況,對傳統(tǒng)PDR算法的步頻檢測進行改進,獲取固定時間間隔內(nèi)的平均步頻數(shù)據(jù)及對應(yīng)時間間隔內(nèi)的加速度方差,作為后續(xù)步長估計的輸入特征。
(2)針對傳統(tǒng)PDR算法中步長估計階段采用靜態(tài)或動態(tài)模型時,因行人姿態(tài)差異導致累計誤差較大的問題,提出采用深度RNN模型預(yù)測行人步長,并通過試驗驗證了該方法可減小累計誤差。
(3)試驗結(jié)果表明,改進的井下人員定位PDR算法定位相對誤差為1.6%~3.9%,較傳統(tǒng)PDR算法誤差小,有效提高了井下人員定位精度。
(4)本文算法在類直線行走場景中取得了良好效果,可用于路徑網(wǎng)絡(luò)簡單的井下巷道中,為后續(xù)井下人員混合定位方法、應(yīng)急逃生系統(tǒng)設(shè)計等提供了一定參考。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數(shù)理化·七年級數(shù)學人教版(2020年11期)2020-12-14 06:59:52
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
藝術(shù)品鑒證.中國藝術(shù)金融(2018年8期)2019-01-14 01:14:28
藝術(shù)品鑒證.中國藝術(shù)金融(2018年10期)2019-01-08 02:44:26
藝術(shù)品鑒證.中國藝術(shù)金融(2018年6期)2019-01-08 02:43:04
藝術(shù)品鑒證.中國藝術(shù)金融(2018年12期)2018-08-26 06:03:48
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
