一種新型多雷達多目標粒子濾波檢測前跟蹤算法
2021-01-22 09:45:08潘凱,陳霄
電子技術應用 2021年1期
關鍵詞:檢測
潘 凱,陳 霄
(杭州電子科技大學 通信信息傳輸融合技術國防重點學科實驗室,浙江 杭州 310018)
0 引言
基于粒子濾波的檢測前跟蹤方法(Particle Filter Track-Before-Detect,PF-TBD)是一種常用的檢測前跟蹤算法,是一種基于蒙特卡洛實驗的遞歸貝葉斯濾波算法[1-2]。由于該算法不受系統是否線性的條件限制,不僅能夠有效解決目標檢測跟蹤中存在的線性高斯問題[3],而且對于非線性、非高斯問題[4-6],近年來,隨著多傳感器網絡的廣泛應用,研究者們將PF-TBD算法用于多傳感器對多個距離較近目標的檢測跟蹤問題,并取得了很多研究成果。文獻[7]提出了多目標粒子濾波PSFIP雙層算法,該算法用于目標距離較近的多目標跟蹤,比IP雙層算法有更好跟蹤能力,其估計目標數目也相對準確。文獻[8]提出了基于并行分區狀態采樣的粒子濾波改進算法,該算法用于目標臨近條件下的多目標跟蹤,降低了目標相互鄰近時的干擾,提高了跟蹤精度。
盡管研究者們取得了很多成果,但是多數成果主要用于目標距離傳感器較近的檢測跟蹤問題,利用目標的運動狀態信息差異進行目標點跡的區分。而當目標距離傳感器較遠且目標運動信息差異不大時,由于一個目標的粒子群跟蹤范圍內包括多個目標的探測信息,可能引起該粒子群中邊緣粒子權重異常增大,進而導致目標點跡偏移,甚至錯誤關聯至其他較近目標的航跡。
針對此類問題,本文提出了一種新型多雷達多目標雙粒子濾波檢測前跟蹤算法(A New Type of Multi-radar Multi-target Tracking Before Detection Algorithm,NM-PFTBD),該算法在目標跟蹤層中對某一目標進行跟蹤時,通過傳感器探測信息修正和目標跟蹤粒子群修正,避免重采樣后的跟蹤粒子群中心偏移,從而降低了目標跟蹤點跡發生偏移概率。
1 傳感器觀測模型與目標運動模型
假設在某個探測區域內,有R個雷達進行掃描檢測,在k時刻,探測區域內存在目標個數為M,第i(i=1,2,3,… ,M)個目標 的 狀 態向量為其中 xi,k、yi,k分別表示k時刻目標i在 x、y 方向的位置,分別表示 k時刻目標 i在 x、y方向的速度。
目標運動模型如下:

其中,ck表示模型變量,通過這個模型變量來表示目標是否出現。wk為k時刻的高斯白噪聲,vk是目標的過程噪聲。目標的狀態轉移過程用Ψ(tk)表示:

每個雷達的每一幀的量測信息為距離-多普勒-方位圖像信息,每一幀的圖像信息分辨單元數目都為Nr×Nd×Nb,第r個傳感器第k 幀量測信息中的第(l,m,n)單元內的觀測值單元信號的復幅度信息為
PF-TBD中每個粒子權值計算公式為:
2 一種新型多雷達多目標粒子濾波算法
本算法采用雙層粒子濾波結構,通常由目標檢測層和目標跟蹤層兩部分組成,分別用于檢測新目標和跟蹤已發現目標。在目標跟蹤層中,每個目標擁有獨立的跟蹤粒子群,按照單目標檢測前跟蹤算法進行跟蹤濾波。PF-TBD算法一般基于粒子權重對粒子進行重采樣并估計目標狀態信息,權重越大的粒子被采樣的概率越大,對目標點跡的影響越大。當傳感器距離目標較遠時,每個回波柵格較大,若目標距離較近,某些傳感器量測柵格中的能量值是由多個目標的回波疊加而成,一定高于僅存在一個目標回波的柵格。因此,在計算粒子權重時,位于這些柵格中的粒子相對于跟蹤粒子群中其他粒子而言,權重值較大,因而被重采樣到的概率更大,導致采樣后的目標跟蹤粒子群偏移原有航跡。若目標距離較近,甚至會將該目標點跡錯誤關聯至其他航跡。
針對以上問題,本文在目標跟蹤層中提出了一種新型的粒子權重計算方法。算法采用了目標回波修正和粒子群粒子修正兩個步驟,減少了目標間的干擾,避免目標跟蹤粒子群的偏移。算法在跟蹤層對每個目標單獨進行跟蹤濾波前,首先計算各個跟蹤粒子群的中心空間單元位置之間的距離,確定每個目標對其他目標的干擾系數,然后在對某個目標進行跟蹤時,根據干擾系數確定該目標跟蹤粒子群所在范圍內是否存在其他目標的回波,若存在則對此目標范圍內的回波信號進行修正,進而大幅削弱其他回波對粒子計算權重的影響,增強正常目標回波影響。其次,在根據新的目標回波計算得到粒子權重后,算法將所有粒子根據其權重大小排序。若粒子群邊緣地區的粒子權重較大,則刪除有害粒子,補充有益粒子,從而避免跟蹤點跡的偏移。
3 算法具體步驟
本算法的雙層粒子濾波結構如圖1所示。
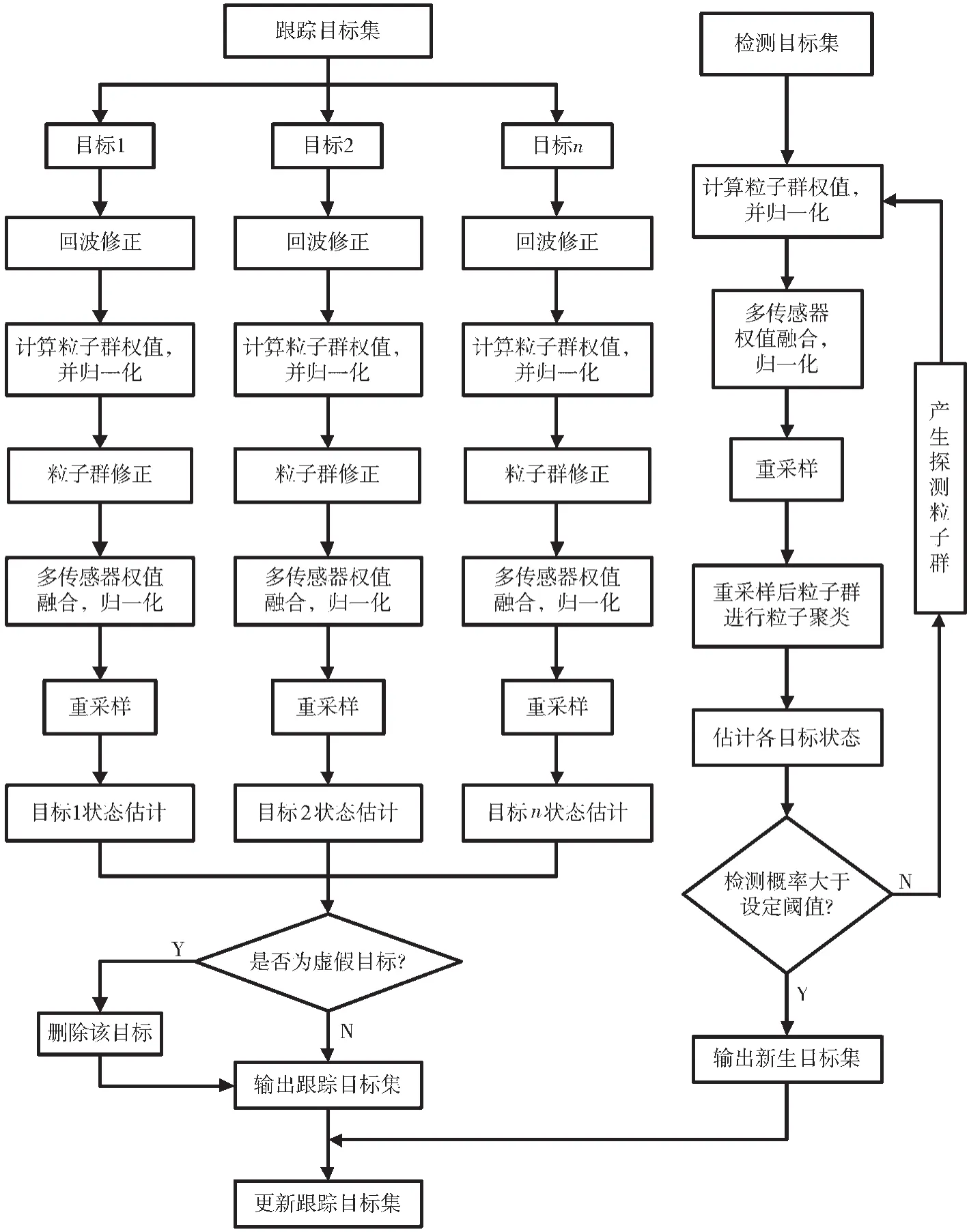
圖1 算法的結構框圖
3.1 目標跟蹤層
目標跟蹤層對已發現的目標實現準確跟蹤,并消除虛假目標點跡。假設 k-1 時刻跟蹤目標集為{S1,k-1,S2,k-1,… ,SM,k-1},第i個目標對應的跟蹤粒子群為 Pi,k-1={p1,i,k-1,p2,i,k-1,… ,pN,i,k-1}。
在對每個目標進行跟蹤濾波前,首先對所有已發現目標和對應粒子群進行狀態轉移,得到目標在k時刻狀態預估值與更新粒子群,然后對基于對應的跟蹤粒子群,對每個目標進行狀態估計。具體步驟如下:
(1)目標回波修正。
①計算每一個傳感器量測空間中其余目標與目標i距離,若小于給定的干擾系數D,則判定基于此傳感器下該目標為干擾目標,形成干擾目標集Ci,r,k。
②在每一個傳感器量測空間中,對于每一個干擾目標,建立以其為中心,半徑為p的修正區域。
③對于每一個傳感器,計算每個修正區域內的傳感器回波。各單元回波幅值為:

(2)基于更新后的傳感器回波計算跟蹤粒子群中每個粒子的多傳感器權值并進行融合。
②將基于同一傳感器的粒子權值歸一化:

③將粒子權值進行融合:

(3)粒子群修正
①依據粒子權值對所有跟蹤群粒子按從大到小進行排序,得到前H個粒子。
④更新粒子權重。
(4)依據粒子權重,對粒子群進行系統重采樣,更新后的跟蹤粒子群為 Pi,k={p1,i,k,p2,i,k,…,pN,i,k}。
(5)根據跟蹤粒子群中狀態為存在的粒子數目,計算目標i檢測概率,判斷目標是否存在。若目標存在,計算目標狀態。
3.2 目標檢測層
目標檢測層的功能是及時探測到新生目標。
算法具體步驟如下:
(2)粒子狀態進行轉移。
(3)計算粒子權重,步驟見3.1節中的步驟2。
(5)對粒子群進行粒子聚類,產生新生目標。
4 仿真分析
假設存在 4部雷達,雷達位置分別為[0,-60]km、[0,-40]km、[0,-20]km、[0,0]km,探測范圍為200~350 km,共探測40幀。探測區域內存在2個目標,2個目標都為勻速直線運動,目標 1的初始位置為[295,35]km,初始速度為[-0.8,0]km/s;目標 2的初始位置為[300,-45]km,初始速度為[-0.8,0]km/s;目標1和目標 2從第2幀開始出現并且一直持續到第40幀。采用本文算法及傳統多雷達多目標粒子濾波檢測前跟蹤算法(Multi-radar Multitarget Particle Filter Tracking Before Detection,MM-PFTBD)[9]分別在信噪比6 dB及12 dB情況下對目標進行檢測跟蹤,結果如圖2~圖7所示。
信噪比為6 dB結果如圖2~圖4所示。
信噪比為12 dB結果如圖5~圖7所示。
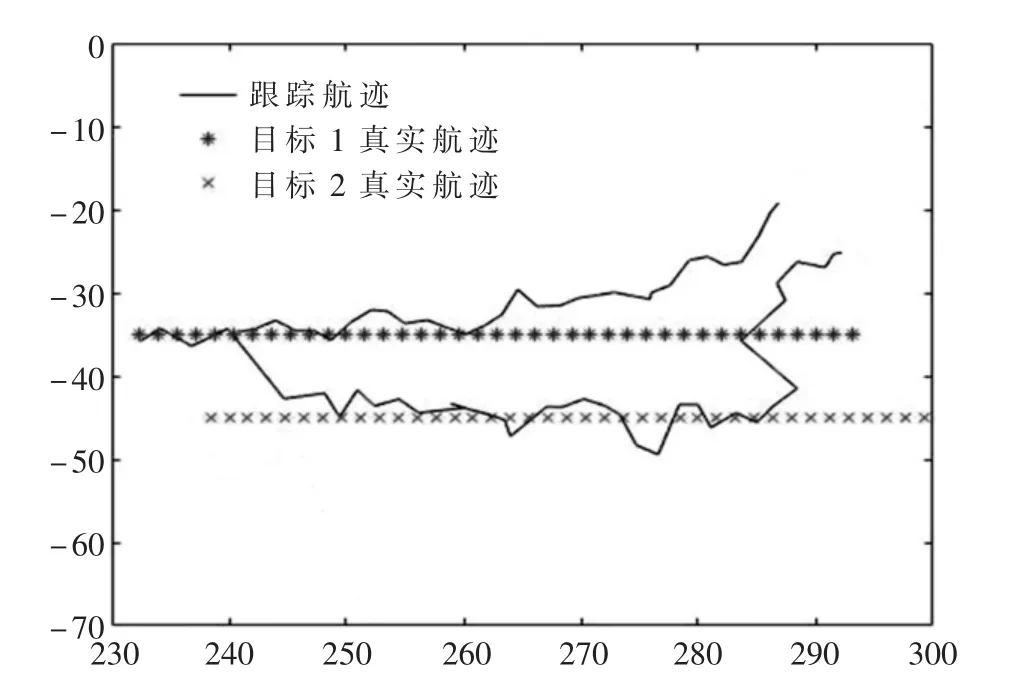
圖2 MM-PF-TBD算法目標航跡圖(信噪比為6 dB)
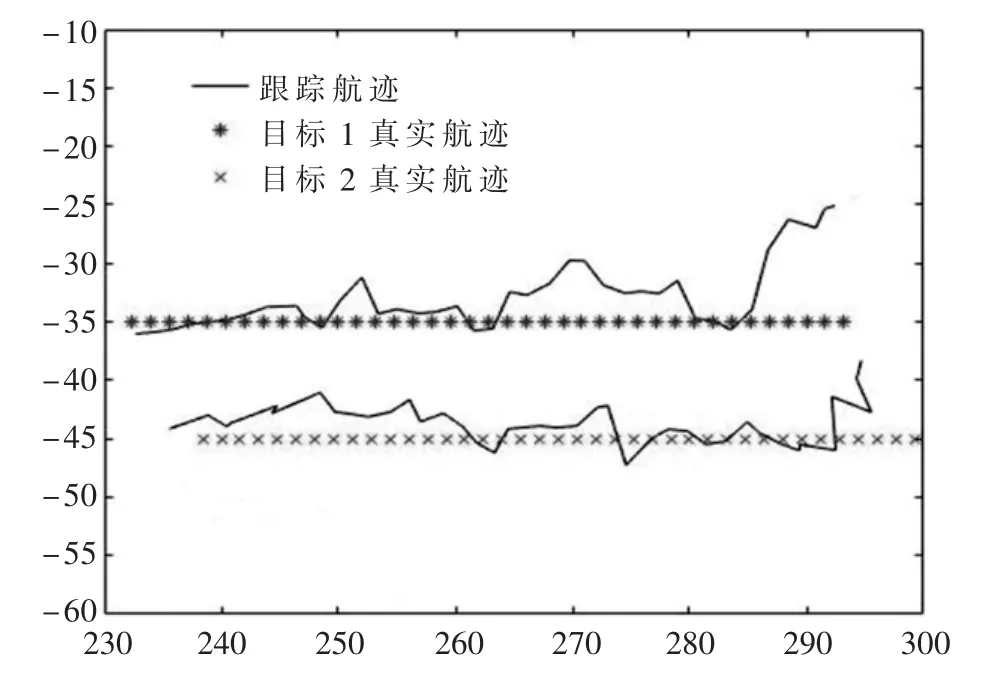
圖3 NM-PF-TBD算法目標航跡圖(信噪比為6 dB)
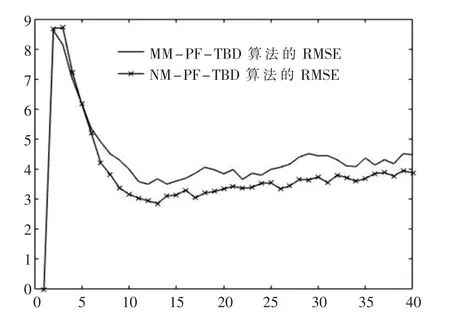
圖4 RMSE對比圖(信噪比為6 dB)
從圖2~圖7中,可以發現兩種算法均可正確發現兩個目標,但是獲得的目標航跡質量不同。以12 dB為例,如圖5所示,利用MM-PF-TBD算法對目標檢測跟蹤時,獲得的目標1航跡在跟蹤過程中逐漸發生偏移,并錯誤關聯至目標2航跡,因此,由檢測層重新建立目標1跟蹤航跡。而在信噪比降低時,甚至發生了航跡二次偏移現象。如圖2所示,在6 dB環境中,目標1航跡開始偏移至目標2,而后又偏移回目標1。而與之相對,本文所提的NM-PF-TBD算法在兩種情況下均實現了兩個目標的正確關聯,沒有發生航跡偏移現象。
從圖4和圖7可看出,NM-PF-TBD算法對于低信噪比情況下目標跟蹤精度提高更多,低信噪比情況下目標航跡更易發生偏移。但因處于目標間距較近情況下,航跡偏移時刻不同,檢測層可能對出現跟蹤航跡偏移的目標新建跟蹤航跡,所以目標跟蹤精度的提高有限。
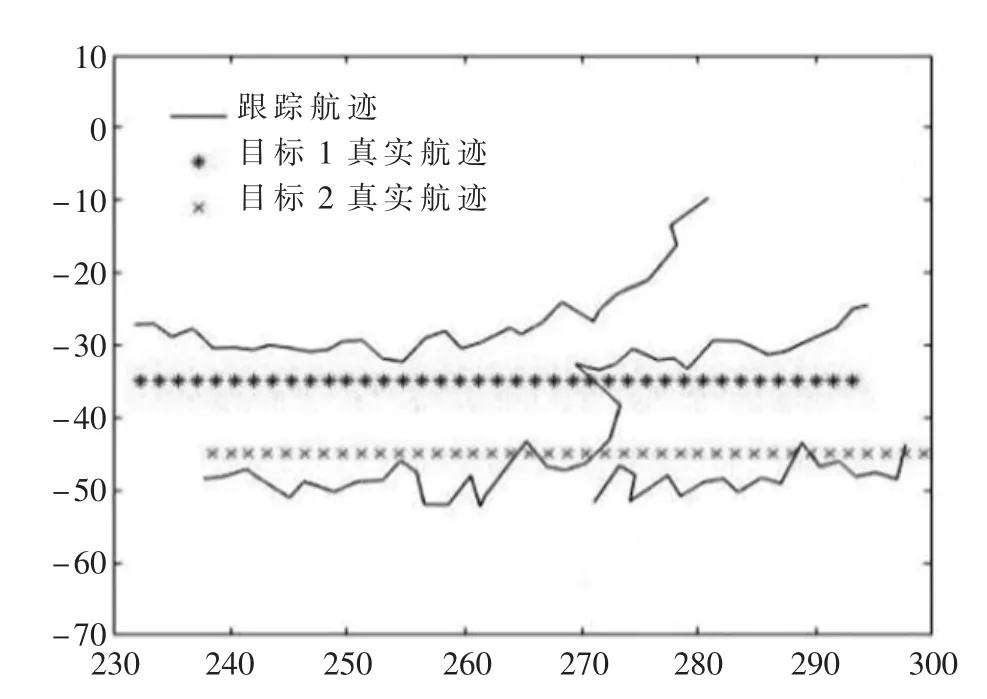
圖5 MM-PF-TBD算法目標航跡圖(信噪比為12 dB)
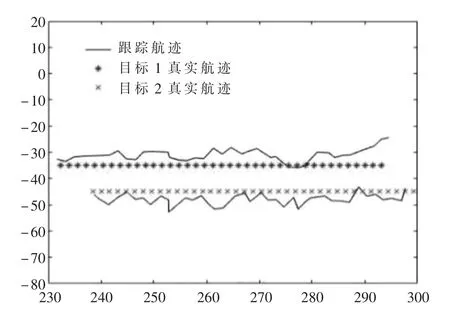
圖6 NM-PF-TBD算法目標航跡圖(信噪比為12 dB)

圖7 RMSE對比圖(信噪比為12 dB)
綜上所述,相對于傳統的MM-PF-TBD算法,本文所提的NM-PF-TBD算法在探測遠距離較近目標時,能將目標跟蹤粒子群約束在本目標航跡附近,防止粒子群偏移,從而有效降低目標航跡偏移概率,并且在一定程度上提高目標跟蹤精度。
5 結論
本文所提的NM-PF-TBD算法,適用于遠距離檢測跟蹤時目標間距較近的情況。算法采用雙層粒子濾波結構,在目標跟蹤層中對目標進行跟蹤時,通過修正跟蹤粒子群范圍內的傳感器回波信號,降低其他目標對本目標跟蹤效果的影響,然后基于修正后的回波信號計算粒子權值,再根據粒子群中不同權值粒子的分布情況,刪除粒子群中權重較大且偏離中心粒子的粒子,同時產生相應數目的優質粒子,從而避免跟蹤粒子群偏離原有航跡。仿真結果表明,本文提出的算法相較于傳統的MMPF-TBD算法,對遠距離較近目標進行檢測跟蹤時,能降低目標間的相互干擾,減少目標航跡偏移現象,并提高目標跟蹤精度。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
