電動汽車接入微網優化調度模型建立及其算例*
2021-01-22 09:45:02金商鶴王育飛時珊珊王皓靖
電子技術應用 2021年1期
關鍵詞:優化
金商鶴,張 宇,,王育飛,時珊珊,王皓靖
(1.上海電力大學 電氣工程學院,上海 200090;2.國網上海市電力公司電力科學研究院,上海 200437)
0 引言
近年來微網和電動汽車發展突飛猛進,風、光出力波動性和電動汽車接入電網無序充電問題亟待解決[1]。為此國內外學者構想將電動汽車與微網協調運行,以緩解兩者單獨接入電網的不利影響,促進兩者的應用和發展[2-5]。在微電網中連接電動汽車進行儲能時,可以有效避免發生間歇性新能源出力的情況,現階段已有許多學者研究了將電動汽車與微網進行連接時的優化調度技術。例如,文獻[6]-[8]設計了一種對含有電動汽車的微網系統進行多目標調度的分析模型,結果發現采取有序充放電的方式可以獲得比無序充電入網方式更高的經濟性;文獻[8]報道了由電動汽車構成的光、風、儲能微電網調度模型,通過引入更加協調的運行模式能夠有效減小系統的運行成本并降低電動汽車運行費用;文獻[9]同時分析了微網發電成本及其對環境造成的影響,對分布式電源的出力狀況進行了動態分析,因此能夠實現在低發電成本的條件下獲得更優的環境效益;文獻[10]根據微網內存在的不確定因素設計得到了具有良好魯棒性的經濟調度模型,并達到了較低的電動車損耗,同時滿足魯棒性與經濟性要求。現有文獻多通過直接負荷控制的方式滿足實施方需求,其對電動汽車特殊性的考慮不夠充分,較少關注單輛電動汽車參與激勵型需求響應項目后的實際響應效果[11-14]。文獻[15]-[16]以負荷峰值削減為目標,制定有序的電動汽車充電策略,該類方法通常缺少對電動汽車參與響應的效果評估,忽略用戶側需求[17]。上述文獻較少考慮電動汽車車主響應意愿,單方面認為入網的電動汽車皆可參與充放電調度;其次,優化調度通常直接針對單輛電動汽車,電動汽車數量較多時容易引發“維數災”問題。
本文從電動汽車用戶響應意愿角度出發,建立兩階段優化調度模型,兩階段優化方法的決策變量數顯著減少,有利于大量電動汽車充放電優化問題的快速求解。
1 兩階段優化調度模型建立
1.1 日前集群調度模型
1.1.1 目標函數
日前集群調度以風光利用率最大為目標:

式中,pw,t、ppv,t、pwv,t分別為微網在t時段的風電、光伏出力預測值以及風光利用功率,pload,t為 t時段微網基本負荷,PEV,t為 t時段電動汽車總的充放電功率,pB,t為 t時段微網中儲能電池的充放電功率。
1.1.2 約束條件
(1)功率平衡約束
微網為維持功率平衡,在t時段的購電量qt為:

(2)電動汽車集群充放電功率約束

式中,pcmax,l、pdmax,l為電動汽車的充、放電功率上限。
(3)儲能電池約束
儲能電池的安全運行需考慮荷電狀態SB約束,且其充放電功率pB,t受其最大充放電功率約束,故有:

式中,SB,max、SB,min分別為儲能電池荷電狀態上、下限,pB,cmax、pB,dmax分別為儲能電池充、放電功率最大值,ηB,c、ηB,d分別為儲能電池的充、放電效率,CB為儲能電池容量。
從安全性和可持續性角度出發,儲能電池在整個調度周期的充放電電量需維持平衡。

1.2 日內實時調度模型
1.2.1 目標函數
計及風電、光伏出力預測誤差,結合電動汽車分類,日內實時調度以與日前集群調度結果偏差最小為目標:
1.2.2 約束條件
(1)功率約束

式中,Nt1、Nt2和Nt3分別為恒功率充電、響應充電和響應充放電的電動汽車數量。
(2)荷電狀態約束
式中,ηl,c、ηl,d分別為電動汽車 l的充、放電效率。
(3)出行需求約束
電動汽車l接入微網的持續時間為:Tcon,l=Tout,l-Tin,l,Tcon,l包含的時間段集合為,則電動汽車在離開時要滿足期望電量要求:

式中,S0,l為電動汽車l接入微電網的初始荷電狀態。
1.3 兩階段優化調度流程圖
電動汽車分類接入微網兩階段優化調度流程如圖1所示。
本文在MATLAB環境下應用Yalmip工具箱調用Gurobi求解器方法,先后對兩階段優化調度模型進行求解。
2 算例分析
2.1 基本參數

圖1 兩階段優化調度流程圖
將一天分為96個時段,調度間隔15 min。有100輛電動汽車接入微網充電,電動汽車容量統一為25 kW·h,充、放電功率上限為 3.6 kW,充、放電效率分別為0.95、0.9,荷電狀態上、下限分別為 1、0.2,由電動汽車功率需求模型隨機生成電動汽車充電需求信息,假設I類、II類和III類電動汽車分別占比20%、30%和50%。假設風光出力預測誤差服從正態分布,預測誤差方差為0.2。日前微網源荷信息如圖2所示,包括微網中的基本負荷、日前風電和光伏出力預測,以及電動汽車各時段的無序充電需求。

圖2 日前微網源荷信息
2.2 結果分析
2.2.1 電動汽車日前集群調度與日內實時調度
電動汽車日前集群調度和日內實時調度計劃如圖3所示。由圖3可知,日前集群調度和日內實時調度當日電動汽車充放電計劃不完全重合,但兩條曲線整體趨勢近似一致,在風電過剩的0時~7時,電動汽車選擇充電響應;在風、光出力不足的17時~23時,電動汽車選擇放電響應。
2.2.2 3類單輛電動汽車充放電計劃
葉舒憲指出:“原型是人類長期的心理積淀中未被直接感知到的集體無意識的呈現,因而是作為潛在的無意識進入創作過程的。但它們又必須得到外化,最終呈現一種‘原始意象’,在遠古的時候表現為神話形象,然后再不同時期通過藝術在無意識中激活轉變為藝術形象。”[2]神話原型中出現了最初的意象,后世作品多會受它影響。這就意味著作者對紅銅色月亮情境的設置并不是獨創的,只不過是對先前意識的一種借鑒。是作者吸收了前人的經驗,再結合自身心理感知,對的二次藝術構思。

圖3 電動汽車日前集群調度和日內實時調度計劃
隨機抽取I、II、III類電動汽車各一輛,其充放電計劃如圖4所示。由圖可知,當日行程結束接入微網后,I類電動汽車直接以最大功率充電,II類電動汽車選擇在風光出力充足時段充電,III類電動汽車在當日行程結束入網的一段時間內優先放電響應,這是因為該段時間內風光出力不足,III類電動汽車為滿足微網基本負荷和部分電動汽車充電負荷的電量需求向微網反向供電,24時后風光出力先后逐漸盈余,電動汽車按實時調度計劃充滿電量。

圖4 3類單輛電動汽車充放電計劃
2.2.3 電動汽車無序充電與兩階段調度對比
用微網內負荷與風光出力的差值α衡量微網源荷供需平衡情況。α=0表示微網內風光出力與各類負荷供需平衡;α<0表示風光出力過剩;α>0表示微網供電不足。電動汽車無序充電與兩階段調度方式下α值變化如圖5所示。可以看出,與無序充電相比,對電動汽車進行兩階段調度的微網,在負荷峰、谷時段的α值都有明顯減小,且基本維持在120 kW以內,即此時的儲能單元基本能滿足微網運行需求。

圖5 兩種方式下α值變化對比
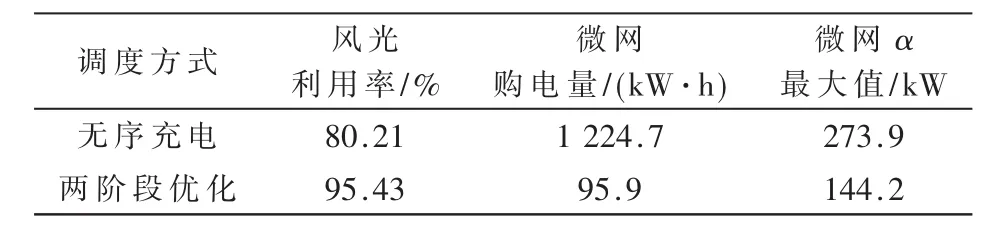
表1 電動汽車無序充電與兩階段優化調度結果對比
電動汽車無序充電與兩階段優化調度結果對比如表1所示。由表可得,對電動汽車實施兩階段優化調度的微網風光利用率高達95.43%,與無序充電方式對比,風光利用率提高了15.22%;無序充電時,微網從大電網的購電量是兩階段調度的近13倍,兩階段優化調度策略的購電量僅為95.9 kW·h,說明對風光出力的高效利用基本能滿足微網基本負荷和電動汽車的電量需求,使得微網購電成本顯著降低。電動汽車無序充電時,微網α最大值為273.9 kW,而儲能單元的放電功率上限為120 kW,兩階段優化調度方式下聯絡線交換功率僅為24.2 kW,則顯著減小了微網風光出力波動對大電網的影響。
綜上,電動汽車分類接入微網的兩階段優化調度策略可以顯著提高風光利用率,降低微網購電量,改善微網功率波動對大電網的影響。
2.2.4 響應充放電調度比例靈敏度分析
由圖1可知,微網給予電動汽車用戶的激勵程度不同時,II類和III類的電動汽車占比會相應變化,電動汽車分類接入微網兩階段優化調度后的風光利用率也會有所區別,故此對響應充放電調度比例靈敏度分析如圖6所示。
由圖6可以看出,隨著III類電動汽車占比的逐漸增加,微網的風光利用率呈明顯的上升趨勢,且III類電動汽車占比在0~50%的風光利用率上升曲線陡峭,占比50%后的上升趨勢明顯減緩。這是因為I類電動汽車對激勵不敏感,該部分調度容量不能高效利用,III類電動汽車占比在50%之后,其對風光利用率的調節能力逐漸逼近上限。但通過增大III類電動汽車占比來提高風光利用率也會相應增加微網運行的激勵支出,故此微網運營商應根據實際的電動汽車的入網規模,合理優化設置相應的激勵形式和激勵水平。

圖6 響應充放電調度比例靈敏度
3 結論
本文根據電動汽車用戶對激勵因素的敏感程度不同,建立電動汽車分類接入微網兩階段優化調度模型,算例分析得到:
(1)在風電過剩的0時~7時,電動汽車選擇充電響應;在風、光出力不足的17時~23時,電動汽車選擇放電響應。
(2)當日行程結束接入微網后,I類電動汽車直接以最大功率充電,II類電動汽車選擇在風光出力充足時段充電,III類電動汽車在當日行程結束入網的一段時間內優先放電響應。
(3)與無序充電相比,對電動汽車進行兩階段調度的微網,在負荷峰、谷時段的α值都有明顯減小,儲能單元基本能滿足微網運行需求。對電動汽車實施兩階段優化調度的微網風光利用率高達95.43%,兩階段優化調度方式下聯絡線交換功率僅為24.2 kW,則顯著減小了微網風光出力波動對大電網的影響。
(4)隨著III類電動汽車占比的逐漸增加,微網的風光利用率呈明顯的上升趨勢,且III類電動汽車占比在0~50%的風光利用率上升曲線陡峭,占比50%后的上升趨勢明顯減緩。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
