空調壓縮機低速無位置傳感器控制策略
2021-01-21 07:03:02
電氣傳動 2021年2期
(江西理工大學電氣工程與自動化學院,江西 贛州 341000)
空調壓縮機由于內部含有高強度的腐蝕性制冷劑,無法安裝位置傳感器,常用I/f控制策略對IPMSM進行位置開環啟動及低速運行,電機運行到中高速時,利用永磁同步電機的反電勢估算轉子的位置與轉速信息[1],常用的獲取反電勢方法有滑膜觀測器[2]方法、模型參考自適應[3]方法、擴展卡爾濾波[4]方法。I/f控制方法存在低速無法進行位置閉環的缺點,易導致永磁同步電機運行過程中發生失步,無法實現大負載啟動。
當電機運行在零速或低速條件下時,有用的反電勢信號信噪比非常低,從而利用反電勢獲取轉子位置與轉速信息在電機零速與低速時失敗。為了能夠在低速甚至零速條件下獲得轉子位置的信息,高頻信號注入法是解決該問題的一個有效方法[5]。其基本思想是把一個高頻電壓信號疊加到基波信號上,共同施加給永磁同步電機的三相繞組,相應的高頻信號中含有轉子位置信息,采用帶通濾波器可以將基波信號濾出,通過信號解調,再經低通濾波就可以得到轉子位置信息。目前,常用的高頻注入信號主要包括旋轉高頻電壓信號[6-8]和脈振高頻電壓信號[9-11]。目前,旋轉高頻電壓信號和脈振高頻電壓信號兩種磁極方向辨識算法執行時間長[12-13],電機在運行時,將導致得到的轉子位置滯后,且在實際應用中,由于采樣精度與頻率受限制,檢測難度大。
為了克服上述方法的缺點,提出了一種新的判別磁極方向的方法,通過對高頻模型下的直軸高頻的正負半軸電流分別進行積分,根據積分值的大小判斷出轉子磁極方向。仿真與實驗結果表明上述提出的方法簡單可靠,易于實現。
1 脈振高頻正弦電壓激勵下的三相PMSM的電流響應
圖1為實際與估算的同步旋轉坐標系示意圖。

圖1 實際與估算的同步旋轉坐標系示意圖Fig.1 The schematic of the actual and estimated synchronous rotating coordinate system
如圖1所示,首先建立了以轉子N極方向進行定向的實際的d-q坐標系,轉子磁極位置N極方向與α-β坐標系的α軸之間角度為θs,θg為算法跟蹤收斂得到的角度,dg-qg坐標系為以θg進行解耦定位的估算的旋轉坐標系,記實際d-q坐標系與估算的dg-qg坐標系的角度差為Δθ=θs-θg。
當dg-qg坐標系的dg軸方向注入信號為ug=um·分配到實際的d-q坐標系的電壓為

式中:um為注入電壓信號的峰值;ωc為注入的正弦波頻率。
由式(1)可以看出,當注入的正弦波頻率ωc足夠大,即感抗遠大于阻抗時,可忽略電阻上的電壓,電機轉速為0時,實際的d-q坐標系的d軸與q軸電壓可化簡為

對式(2)右邊的電流did,diq進行積分得到:

根據式(3)的d,q軸電流可得到合成的高頻定子電流ic,即

將式(4)轉換變型為指數形式可得:

式中:Lq,Ld分別為q,d軸方向電感。
高頻定子電流ic在dg-qg坐標系上的電流的表達式為

2 轉子位置估算方法
2.1 利用Arctan函數的轉子位置估算方法


由式(8)可知,經過解調后的方程右邊由兩項組成:一項為關于估算偏差2Δθ的常量;另一項頻率為注入電壓信號頻率的兩倍的高頻余弦信號。于是可通過一階低通濾波器濾出高頻余弦信號,得到關于估算偏差2Δθ的常量。對式(8)進行低通濾波后得到:

由式(9)可得到經過濾波后的α-β軸坐標系下的iα-LPF與iβ-LPF,即
若給θg=0方向注入信號時,有:

若給θg=π/2 方向注入信號時,有:

由式(11)、式(12)得到:

對式(13)進行變型可得:

由式(14)可以看出,利用Arctan函數即可計算出永磁體的轉子位置角度,即

其中

利用Arctan函數計算轉子位置角度存在的缺點:該方法屬于開環控制,受電流檢測周期與精度的影響大,抗干擾性差,因而易受基波電流的影響,只適用于電機靜止時的情況,具有局限性,且導致估算出的轉子位置角度不平滑與高頻抖動。
2.2 基于鎖相環的轉子位置估計方法
正如前文所述,鑒于利用Arctan函數計算轉子位置的方法的局限性與缺點,提出了基于鎖相環(PLL)獲得轉子位置的方法。圖2為控制系統的結構原理圖。圖 2 中T-1(θg)為反 Park 變換;T(θg)為Park變換;SVPWM-VSI為逆變器驅動模塊;T3s/2s為Clarke變換;LPF為低通濾波器。

圖2 基于PLL獲得轉子位置角度的系統結構原理圖Fig.2 Schematic diagram of the system structure for obtaining the position angle of permanent magnets based on PLL

由式(16)可知,q軸電流為幅值受估算偏差2Δθ的正弦值影響的正弦信號,且當2Δθ為0或的整數倍時,幅值為0。
對式(16)的dg-qg坐標系下的q軸電流作調解可得:

經過解調后的式(17)右邊由兩項組成:一項為關于估算偏差2Δθ的常量;另一項為頻率為注入電壓信號頻率的兩倍的高頻余弦信號。可通過一階低通濾波器濾出高頻余弦信號,得到關于估算偏差2Δθ的常量。對式(17)的解調后的信號的進行低通濾波后得到:

當sin(2Δθ)足夠小時,可認為2Δθ=sin(2Δθ),經過如圖3所示的鎖相環模塊,即可收斂得到轉子的位置與轉速。

圖3 鎖相環模塊Fig.3 Phase-locked loop module
根據圖3可得到由θg到θs的傳遞函數G(s),即

其中

式中:ξ為阻尼系數;ωn為角速度,決定PI調節器的帶寬;Kp,Ki為PI調節器的參數。
當輸入信號的角頻率在0以上且ωn以下時,鎖相環能快速地跟隨輸入信號的幅值與頻率,否則跟隨失敗;ξ主要影響的是傳遞函數的動態性能,且ξ=1時,為臨界阻尼狀態。
3 轉子磁極方向識別
目前常用的轉子磁極方向識別有兩種方法:一種是在估算得到的轉子位置的正、反方向施加幅值相等、時間相同的電壓,通過檢測出兩種情況下的直軸電流,電流峰值大的即為磁極正方向;另一種是在估算得到的轉子位置正、反方向施加幅值相等、時間相同的電壓,檢測出兩種情況下,直軸電流從穩態值衰減至0時所用的時間,時間較小的為磁極的正方向。上述兩種方法有2個缺點:1)電流過零點時有震蕩,易導致采樣得到的結果存在誤差;2)對采樣電路要求高,抗干擾性差,增加了硬件成本;為克服以上缺點,提出了通過對高頻模型下直軸高頻的正、負半軸電流分別進行積分,并根據積分值的大小判斷出轉子磁極方向的方法。
當電機轉子的初始位置在特殊位置時,即式(18)中sin(2Δθ)等于0時,Δθ=0,±π/2,π中僅當Δθ=0時,估算的轉子位置與實際位置相同,當Δθ不等于0時,電機必然會啟動失敗,只有通過正確辨別出轉子的極性,才能使電機順利啟動。
當Δθ=±π/2時,即估算的轉子位置與實際的轉子位置之間角度為90°,從而無法利用定子電流的非線性磁化識別轉子極性。圖4為特殊位置排除方法流程圖,可避免Δθ=±π/2。
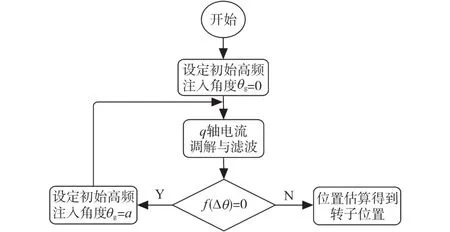
圖4 特殊位置排除流程圖Fig.4 Flowchart of special location exclusion
特殊位置排除方法具體實施步驟為:
1)設定初始高頻注入角度為0;
2)采樣得到的相電流經矢量變換得到q軸電流,q軸電流信號經調解與濾波得到f(Δθ);
3)判斷f(Δθ)是否為0,如果是0則跳轉至步驟1),并改變初始高頻注入角度a,a不等于0,±π/2,π之外的任意一個角度。否則執行步驟4);
4)位置估算得到轉子位置信息。即可開始進行轉子極性識別。
式(16)中的d軸高頻響應電流為
因f(Δθ)收斂 于 0,即 Δθ=0 或 π。 則 cos(2Δθ)=1,則估算同步旋轉坐標系下的d軸高頻電流響應可表示為

當f(Δθ)收斂于0時,估算得到的轉子位置角度與實際的轉子位置角度之差有兩種情況:第一種為θg=θs;第二種為θg=θs+π。下面分別分析兩種情況下估算同步旋轉坐標系下的d軸高頻電流響應。
情況1:θg=θs。當0<ωct<π時,相電流生成的磁鏈與轉子的永磁體的N極方向一致,此時磁路產生飽和,d軸電感減小,d軸高頻響應電流增大;當π<ωct<2π時,相電流生成的磁鏈與轉子的永磁體的N極方向相反,此時磁路退出飽和,即d軸電感增大,d軸高頻響應電流減小。dg-qg坐標系下的ig-d波形如圖5所示。

圖5 θg=θs時的電流波形Fig.5 Current waveform when θg=θs
ig-d在區間[0 π]與區間[π 2π]分別與x軸圍成的面積為S1,S2,且S1>S2,其中S1,S2為

根據式(22)對正、負半軸的d軸高頻響應電流分別積分,當S1>S2時,則θg=θs,即可識別轉子極性。
情況2:θg=θs+π。當π<ωct<2π時,相電流生成的磁鏈與轉子的永磁體的N極方向一致,此時磁路產生飽和,導致d軸電感減小,d軸高頻響應電流增大;當0<ωct<π時,相電流生成的磁鏈與轉子的永磁體的N極方向相反,此時磁路退出飽和,即d軸電感增大,d軸高頻響應電流減小。估計同步旋轉坐標系下的ig-d波形如圖6所示。ig-d在區間[0 π]與區間[π 2π]分別與x軸圍成的面積為S1,S2,且S1<S2,即當S1<S2,θg=θs+π。

圖6 θg=θs+π時的ig-d電流波形Fig.6 ig-dcurrent waveform when θg=θs+π
4 仿真與實驗結果分析
4.1 仿真結果分析
通過Matlab/Sinmulink搭建仿真模型,設定仿真參數為:電機三相內置式永磁同步電機,電阻R=0.025 25 Ω,交軸電感Lq=0.001 09 H,直軸電感Ld=0.000 573 H,極對數p=6;三相逆變器端電壓為48 V,開關頻率為10 kHz。注入的高頻電壓信號幅值為5 V,頻率為1 kHz,初始注入角度為0。為了驗證改進后的轉子位置估算方法的實用性與抗干擾性,在仿真過程中,電機啟動時,給定速度為 100 r/min,在 0.2 s時突加負載 10 N·m,在0.5 s時突然給定速度為-100 r/min,圖7為利用Arctan函數的轉子位置估算方法得到的轉子位置圖,圖8為利用Arctan函數的轉子位置估算方法得到的位置估算誤差圖,圖9為基于鎖相環的位置估算方法得到的轉子位置圖,圖10為基于鎖相環的轉子位置估算誤差圖。

圖7 利用Arctan函數的轉子位置估算方法得到的轉子位置Fig.7 Rotor position obtained by the rotor position estimation method with Arctan function

圖8 利用Arctan函數的轉子位置估算方法得到的位置估算誤差Fig.8 Position estimation error obtained by the rotor position estimation method with Arctan function

圖9 基于鎖相環的位置估算方法得到的轉子位置圖Fig.9 Rotor position based on the position estimation method with the phase-locked loop

圖10 基于鎖相環的轉子位置估算誤差Fig.10 Rotor position estimation error based on phase-locked loop
仿真結果分析:由圖7、圖8可知,利用Arctan函數的轉子位置估算方法在電機啟動過程中、突加負載、電機突然給定反向速度時,估算誤差較大,抗干擾性較差,且在穩定運行時,估算出的位置角度滯后,對于干擾較多且要求動態響應快的場合不適宜應用。由圖9、圖10可知,基于鎖相環的位置估算方法在啟動過程中、突加負載、電機突然給定反向速度時,估算誤差角度接近0,抗干擾性強,且在穩定運行時,估算出的位置角度不滯后。
4.2 實驗結果分析
4.1節已經對基于高頻電壓信號注入法的無位置傳感器控制策略進行了理論分析與仿真研究,本節對所提出利用鎖相環策略的轉子位置估算方法進行了實驗驗證,控制芯片采用TI公司的TMS320F28035芯片,空調壓縮機內的永磁同步電機參數為:P=800 W,極對數p=6,額定電壓48 V,額定電流15 A,定子電阻0.232 Ω。PWM開關載頻10 kHz,死區時間3μs。逆變器橋臂采用并聯MOSFET的方式增大過流能力。采用id=0的策略,速度環和電流環都采用傳統PI進行調節。實驗平臺如圖11所示。

圖11 壓縮機低速無位置傳感器控制實驗平臺Fig.11 Experimental platform of compressor with low speed position sensorless control
實驗結果分析:實驗設定轉速為10 r/min,圖12、圖13分別為空載、負載5 N·m的運行工況實驗波形圖,由圖12、圖13可知,基于鎖相環的位置估算方法得到的轉子位置波形較平滑,估算出的位置波形基本可以與實際的位置波形重合。
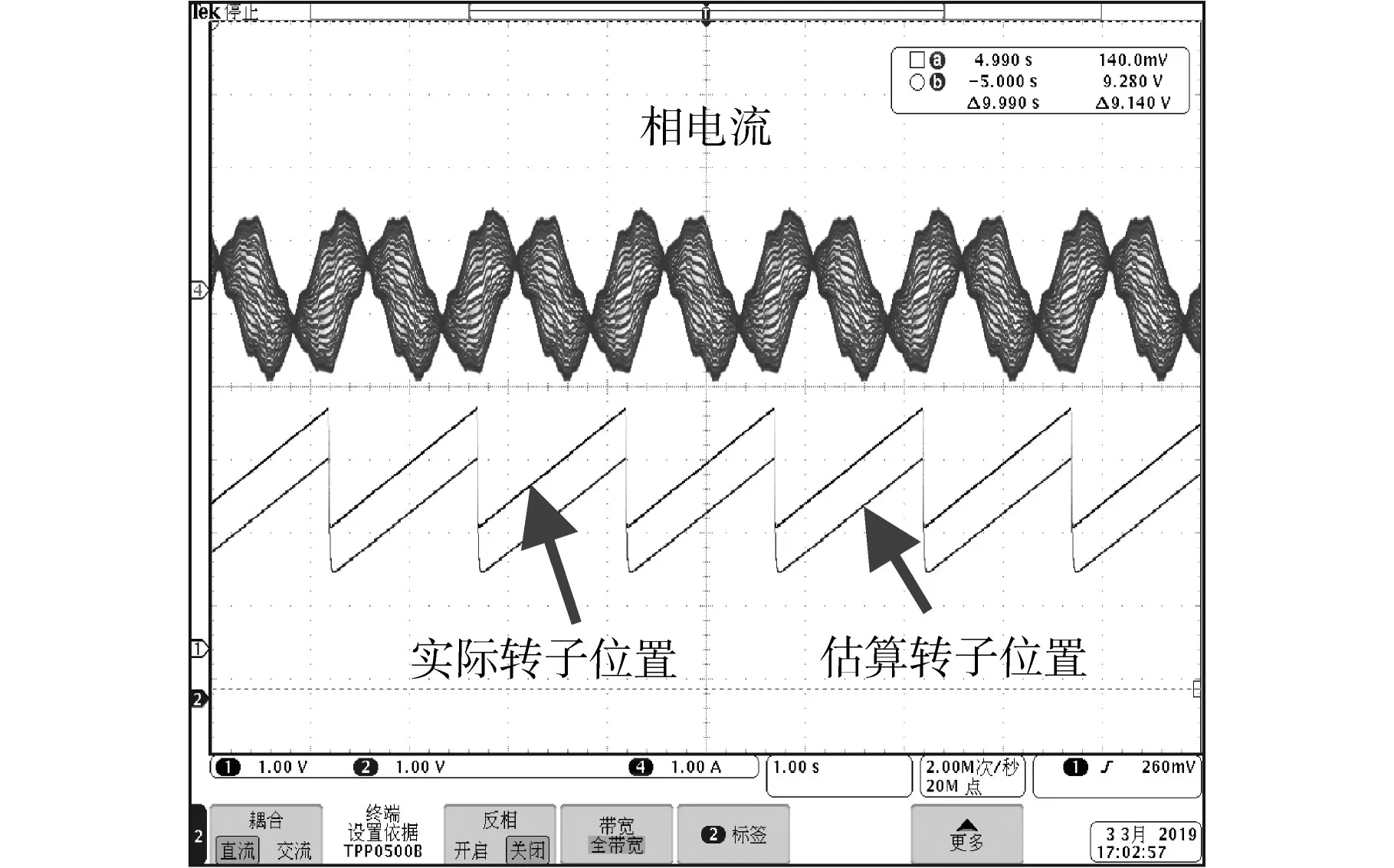
圖12 空載實驗波形圖Fig.12 The test waveforms with no-load
圖13 5 N·m負載實驗波形圖Fig.13 The test waveforms with load of 5 N·m
5 結論
針對壓縮機內置式永磁同步電機低速位置開環運行時響應慢、無法大功率啟動、控制精度低等問題,通過分析內置式永磁同步電機在脈振高頻正弦電壓下的高頻電流響應模型,提出了一種基于鎖相環策略的轉子位置估算方法,為了使電機可靠、穩定的啟動,提出了一種利用d軸的高頻響應電流進行積分的初始磁極方向識別方法,該方法對采樣精度要求較低,算法執行時間短。為了驗證提出的方法,搭建了仿真模型與實驗平臺,仿真與實驗結果證明了所提出方法的有效性。
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2021年4期)2021-04-20 14:06:36
鴨綠江(2021年35期)2021-04-19 12:24:18
計算機應用(2021年1期)2021-01-21 03:22:38
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
意林原創版(2016年10期)2016-11-25 10:28:30
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
Coco薇(2015年1期)2015-08-13 02:47:34
