智能恒溫遙控注射裝置的設計與實現
2021-01-21 09:02:54劉曉龍何夢曉劉方玉胡容博許思毛
醫療衛生裝備 2021年1期
關鍵詞:單片機
劉曉龍,何夢曉,劉方玉,胡容博,侯 欽,許思毛*
(1.廣西師范大學,廣西桂林 541006;2.新疆師范大學,烏魯木齊 830054;3.烏魯木齊市第四人民醫院設備科,烏魯木齊 830002;4.慕尼黑工業大學建筑實現與機器人學教研室,德國慕尼黑 80333;5.汕頭大學醫學院第二附屬醫院消化內科,廣東汕頭 476000)
0 引言
當前醫護人員在為隔離患者輸液、換藥時需頻繁進入高危環境內,導致感染風險增加,并且部分治療藥物如丙種球蛋白、α-干擾素、糖皮質激素等對貯存溫度有要求的藥液在轉運或長時間注射過程中受溫度影響較大,溫度過高或過低都會影響藥物的生物活性[1]。
目前已研制的遙控注射設備在微創脊柱外科手術與各類X 射線造影檢查中已有初步應用[2-5],但無法長時間保存有貯存溫度要求的藥液。為此,本實驗設計并實現了一種基于單片機的智能恒溫遙控注射裝置。本裝置以STC89C52 單片機為控制核心,采用DS18B20 溫度傳感器實時反饋藥艙內藥液溫度,以模糊算法為基礎并進一步結合比例-積分-微分(proportion-inteegration-differentiation,PID)控制,通過操控H 橋電路以驅動氧化鋁高溫陶瓷發熱片與半導體制冷片,進而對藥液進行恒溫儲存。步進電動機受紅外遙控指令操控,可替代人手推注以實現遙控注射功能。經實驗證明,本裝置藥艙溫度穩定,遙控注射精度較高,可滿足多種領域的需要。
1 恒溫遙控注射裝置設計
1.1 硬件設計
本裝置采用模塊化電路設計,由主控模塊、紅外遙控模塊、注射模塊、智能溫控模塊、顯示模塊和參數設置模塊等組成,如圖1 所示。
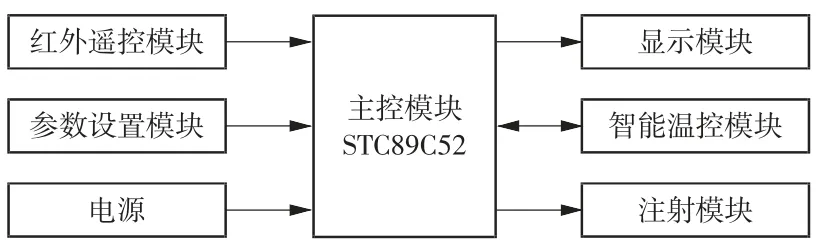
圖1 恒溫遙控注射裝置組成框圖
1.1.1 主控模塊
主控模塊以STC89C52 單片機為核心,該單片機為互補型金屬氧化物半導體(complementary metaloxide-semiconductor,CMOS)型 8 位處理器,可在低電壓條件下工作并具備在線編程功能,具有抗干擾強、功耗低、速度快、價格低等優點[6]。其通用IO 管腳能與MCS-51 型單片機的指令集較好兼容。
1.1.2 紅外遙控模塊
紅外遙控模塊由發射、接收兩部分組成。當按下按鍵產生發射指令時,載波為38 kHz 的信號由控制器發出并傳遞給紅外發射二極管,紅外接收部分通過紅外線接收頭接收后解碼并執行相應指令[7-8]。
紅外信號發射器由遙控集成電路、按鍵矩陣、紅外發射二極管、電源等組成,實物如圖2 所示。脈沖信號通過遙控指令編碼器加工后轉換為遙控編碼脈沖,由載波實現脈沖幅度調制(pulse amplitude modulation,PAM),紅外發射二極管被載有遙控指令的調制信號激勵后發射出紅外信號。
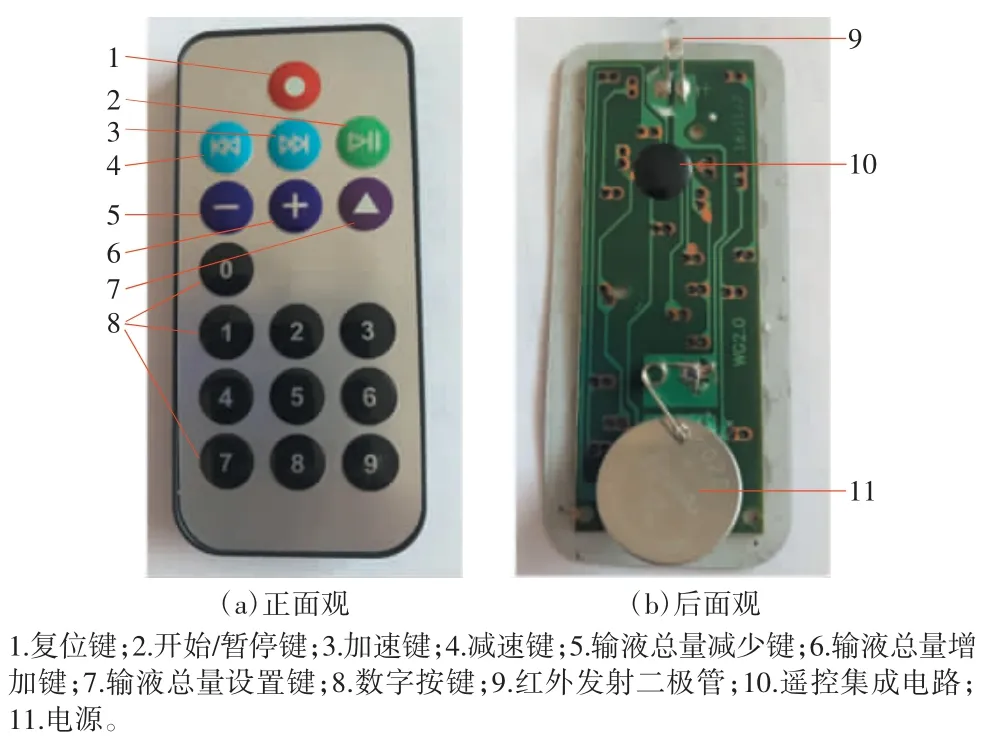
圖2 紅外信號發射器實物圖
接收部分由紅外一體化接收電路構成(如圖3所示),主要包括紅外接收二極管、解調器、循環控制電路、前置放大電路和帶通濾波器。其中HX1838 型紅外接收二極管電壓為2.7~5.5 V,采用環氧樹脂塑封,具有功耗低、抗干擾強、靈敏度高等特點,能匹配COMS、TTL(transistor-transistor-logic)電路[9]。
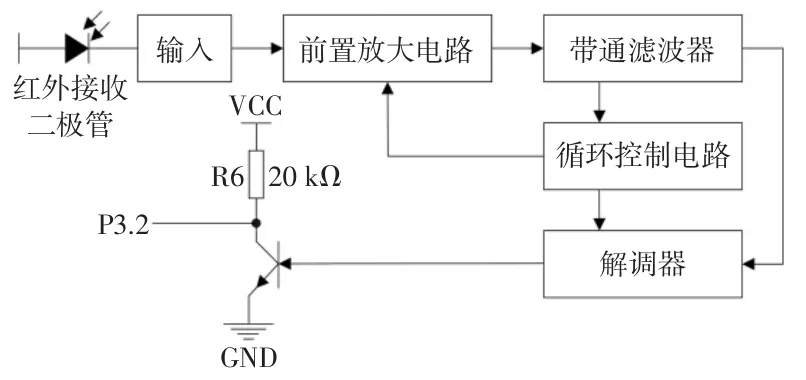
圖3 紅外一體化接收電路框架圖
1.1.3 智能溫控模塊
智能溫控模塊由溫度采集與溫度控制2 個部分組成。
溫度采集部分選用DS18B20 單線數字傳感器,其測量區間為-55~125 ℃,精度高達±0.5 ℃,電壓范圍為3.5~5.5 V,連接于單片機P3.4 端口,通信只需一條輸入輸出線[10-11],具有抗干擾強、體積小、精度高、易配處理器、功耗低等特點[12]。傳感器DQ 引腳穿過上拉電阻后與單片機P3.4 接口相連,VCC 引腳接電源,GND 引腳接地。時鐘脈沖信號由低溫度系數振蕩器輸出后在高溫度系數振蕩器產生的門周期內進行次數記錄,計數器將低溫度系數振蕩器的脈沖進行運算得出溫度數值。傳感器內部構架如圖4 所示,溫度采集電路如圖5 所示。
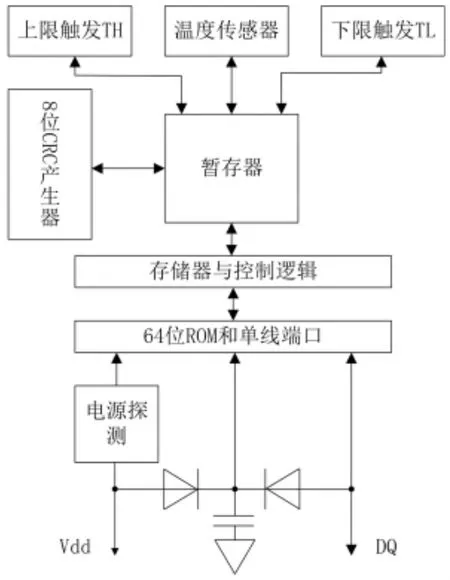
圖4 DS18B20 內部構架
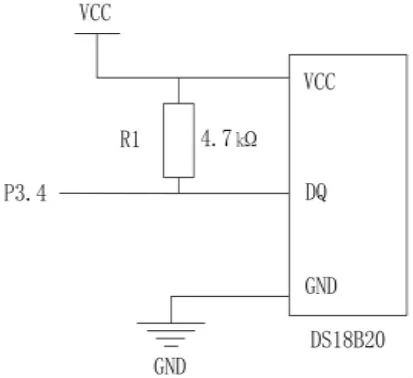
圖5 溫度采集電路
溫度控制部分元件選用XH-C1206S 半導體制冷片與CT-JRP404020 氧化鋁陶瓷發熱板。XHC1206S 制冷片電壓為12 V,功率為72 W,在全固態制冷領域內有廣泛應用,具有體積小且無滑動部件、噪聲小等優點[13]。根據Peltier 效應,熱量轉移會發生在直流電通過的2 種不同半導體材料串聯而成的電偶兩端之間[14],因此為進一步降低半導體冷端溫度,在裝置熱端安裝散熱片與微型風扇。CT-JRP404020氧化鋁陶瓷發熱板電壓為12 V、功率為18 W,具有絕緣性好、體積小、熱效率高等特點[15]。溫度傳感器采集的藥艙溫度高于預設值時將制冷片端繼電器閉合,發熱板端繼電器斷開進行制冷,反之進行制熱。溫度控制電路如圖6 所示。
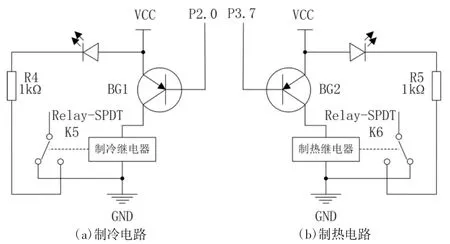
圖6 溫度控制電路
1.1.4 注射模塊
注射模塊由驅動芯片、步進電動機、傳動部件3個部分組成。單片機傳出的控制信號輸入驅動芯片,經放大后進入步進電動機。步進電動機軸與精密絲桿通過聯軸器相連,因此精密絲桿可跟隨步進電動機軸同步旋轉。精密絲桿上的內螺紋塊與精密滑桿上的滑塊連為一體,當精密絲桿旋轉時,可帶動內螺紋塊與滑塊、注射器推桿頂塊、注射器推桿卡槽組成的復合體在水平面內做直線運動。注射器針筒由于被固定在注射器卡槽內,而注射器推桿柄被固定于注射器推桿卡槽內,因此傳動部件整體可將步進電動機轉子的圓周運動轉換為注射器推桿的直線運動,從而執行藥液輸注。當注射動作完成或復位完畢時滑塊觸碰限位開關實現限位保護。注射電路如圖7 所示,注射模塊實物如圖8 所示。
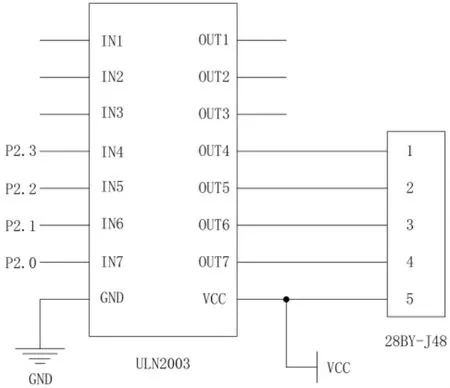
圖7 注射電路
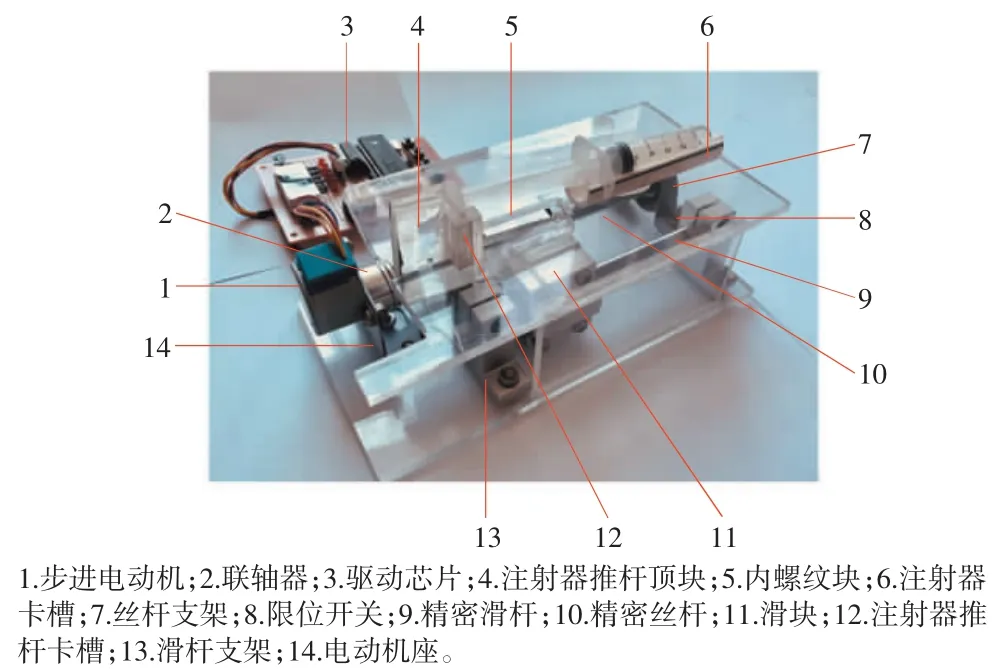
圖8 注射模塊實物圖
(1)驅動芯片。驅動芯片選擇ULN2003AN,其采用達林頓陣列設計與塑封工藝,能直接處理以往依靠標準邏輯緩存器處理的各種數據,具有工作電流大、電壓高的特性[16]。
(2)步進電動機。電動機采用28BY-J48 型步進電動機,其電壓為5 V,軸徑為5 mm,減速比與步進角度分別為1/64 和5.625°,電動機軸通過聯軸器與滑臺的精密絲桿相連。
(3)傳動部件。傳動部件包含聯軸器、精密絲桿、精密滑桿、電動機座、注射器推桿頂塊、滑塊、內螺紋塊、絲桿支架、滑桿支架、注射器卡槽和注射器推桿卡槽。其中絲桿選用0.25 mm 螺距精密絲桿,滑桿選擇1 mm 直徑精密滑桿。
1.1.5 顯示模塊
顯示模塊包含溫度顯示與注射顯示2 個部分。溫度顯示選用LCD1602 液晶顯示器,經編碼后可顯示藥艙實時溫度、預設最高溫度、預設最低溫度等信息[17]。LCD1602 顯示內容多樣,驅動也較為方便,是一種應用廣泛的字符型液晶顯示器。為了消除錯誤顯示以及調節液晶顯示器的對比度,在V0 端口接入電位器進行調整。溫度顯示電路如圖9 所示。注射顯示采用3641BS 型四位一體共陽輝光管,該管能在小電流與低電壓條件下工作,體積小且采用固態封裝。其正常電流20 mA,屏顯尺寸為0.36 in(9.144 mm),經編程后能顯示步進電動機轉向、預輸注液體總量、注射速度等信息。注射顯示電路如圖10 所示。
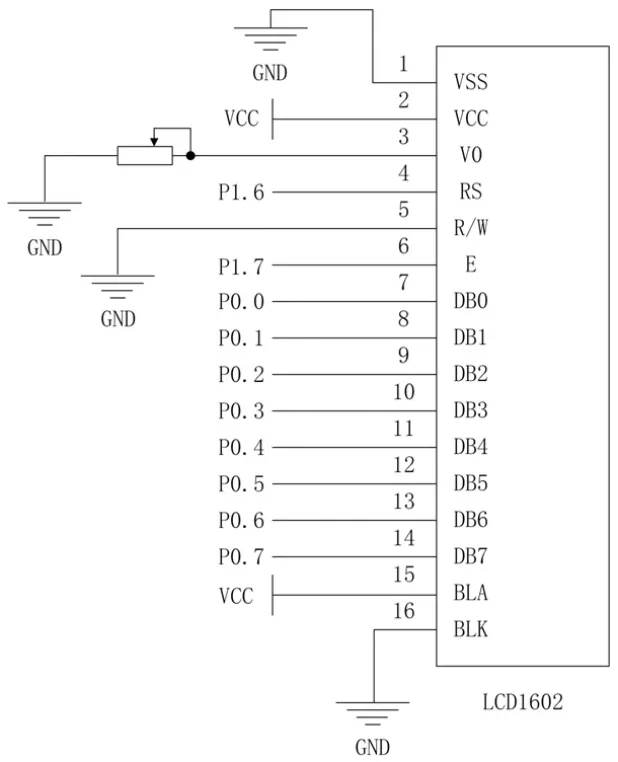
圖9 溫度顯示電路

圖10 注射顯示電路
1.1.6 參數設置模塊
溫度參數設置采用3 個輕觸式機械開關實現,當按下時電路導通。本裝置運行時單片機對按鍵進行掃描以判別開合狀態,實現數據導入。其3個開關分別接入單片機P1.1、P1.2、P1.3 端口,依次控制增加預設溫度、降低預設溫度、切換選擇預設最高溫度/預設最低溫度。注射參數設置依賴紅外發射器實現,通過按鍵矩陣中的輸液總量設置鍵、輸液總量增加鍵、輸液總量減少鍵、數字按鍵設置液體輸注總量,通過加速鍵、減速鍵可預選注射速度。
1.2 軟件設計
軟件采用Keil 進行設計,編程語言為C 語言。考慮到控制功能的優劣決定設備的恒溫能力,故選用模糊算法為基礎控制算法,其具有無需建立數學模型、實時控制性好且魯棒性強等特點[18]。在此基礎上結合PID 控制,大大提升了穩態與動態效果。其中智能溫控流程如圖11(a)所示。在工作前預先設置溫度參數,工作時傳感器采集藥艙溫度數據后發送至單片機,通過操控H 橋電路以驅動氧化鋁高溫陶瓷發熱片與半導體制冷片,對藥艙實施溫控,電路循環工作直到穩定藥艙溫度處于設置區間內。遙控注射流程如圖11(b)所示,系統初始化后可按下紅外信號發射器上的輸液總量設置鍵進入輸液總量選擇界面,此時按下遙控面板上的數字鍵或輸液總量增加/減少鍵可調整輸注液體的總量,設置精度為0.1 mL。藥液推注速度可選擇范圍為1~1 200 mL/h,在此區間內,可以1 mL/h 為一擋按需調節注射速度。當預設藥物總量輸注完畢、一次性注射器內藥液全部注射完畢、操作者通過紅外信號發射器鍵入暫停指令時,注射模塊則停止工作。此時按下復位鍵,電動機反轉帶動注射器推桿卡槽倒退復位。
2 恒溫遙控注射裝置具體實現
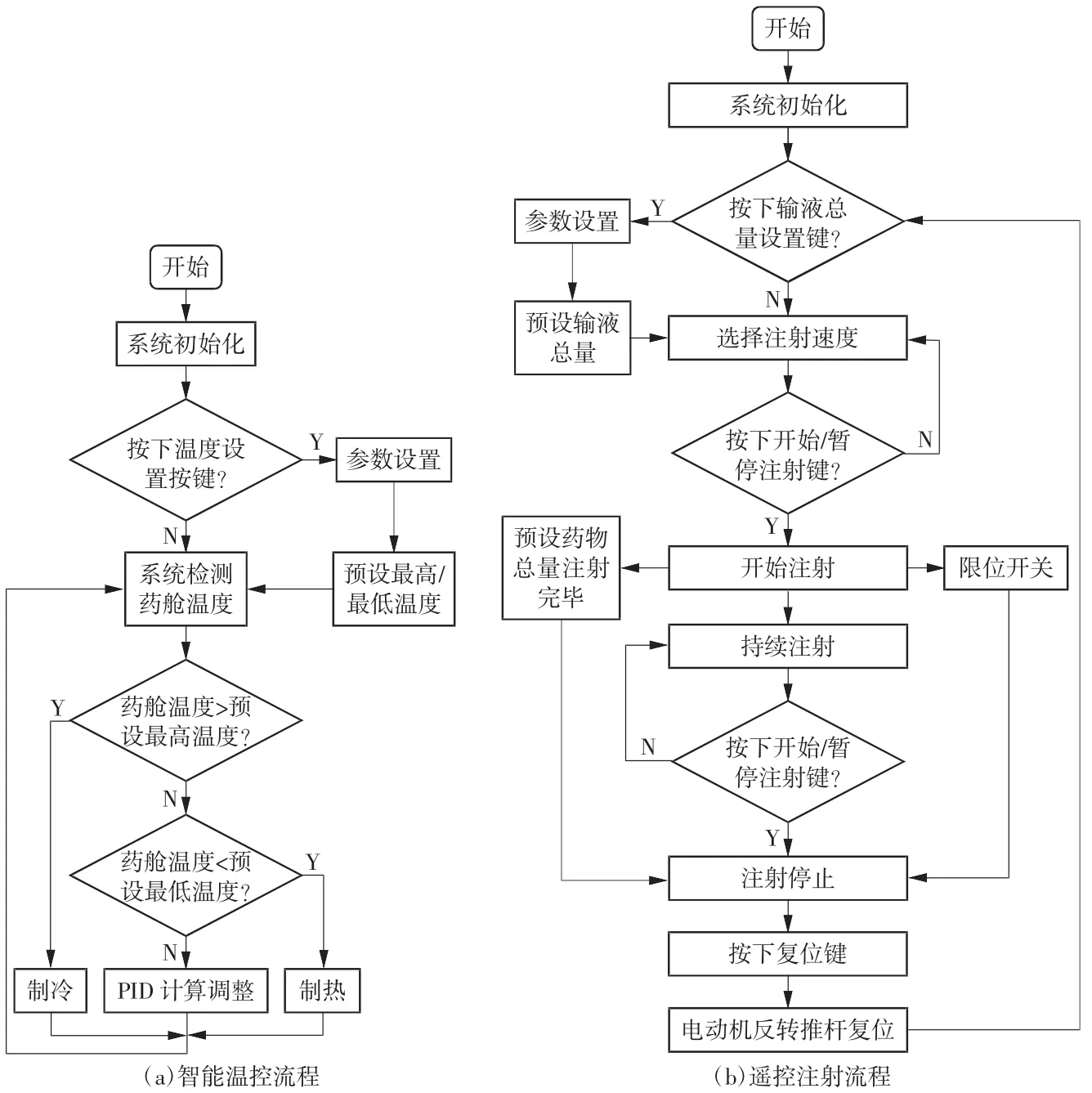
圖11 軟件控制流程圖
本裝置使用12 V、2 A 外接電源,采用2 mm 厚聚甲基丙烯酸甲酯板制作外殼,為保證溫控效果,在藥艙內部鋪設非交聯閉孔結構的聚乙烯發泡棉,殼體縫隙填充聚氨酯密封劑。各部件連接關系與原理構造如圖12 所示。整個裝置通過輕觸式機械開關預先設置期望溫度區間,溫控電路循環工作以將藥艙溫度穩定于設置區間內。當有注射需求時可使用紅外信號發射器提前設置液體輸注總量與注射速度,隨后進一步操控裝置完成注射動作,藥液通過預先埋入機體的留置針進行輸注。
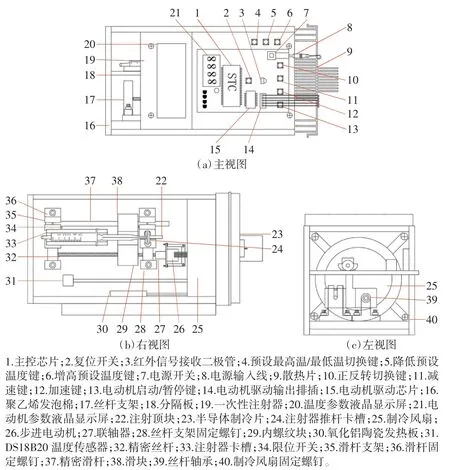
圖12 裝置原理構造三視圖
3 測試與結果
本裝置于2020 年1—4 月在廣西師范大學運動醫學實驗室完成設計與制作,經多次調校后各功能模塊運行穩定,暫無故障發生,實物如圖13 所示。應用測試于2020 年4 月在新疆維吾爾自治區產品質量監督檢驗研究院完成,主要測試恒溫功能與遙控注射功能。
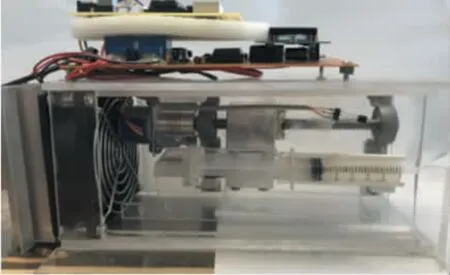
圖13 智能恒溫遙控注射裝置實物圖
3.1 恒溫功能測試
為了測試裝置的溫控效果,在密閉空間進行測試。開機后通過參數設置按鍵將溫度預設值設定為2~8 ℃后依次置入 35、5、-15 ℃的環境溫度中,隨后選用testo 905T1 電子測溫計記錄液體推進器內藥液溫度變化數據并繪制曲線。經初步試驗,本裝置能夠在不同室溫下對藥液進行恒溫保存,測試結果如圖14 所示。
3.2 遙控注射功能測試
首先測試紅外發射與接收功能,啟動紅外信號發射器,通過遙控發射模塊鍵入指令,發射管上的載波波形通過RIGOL DS1102ZE數字示波器測試,結果如圖15 所示。隨后通過機械按鍵依次輸入開始、暫停、加速、減速等指令,驅動器PWM 波輸出波形如圖16所示。
隨后將本裝置吸入蒸餾水后進行遙控注射功能測試,結果顯示注射器推桿及推桿卡槽在工作行程中運行平穩且全程無摩擦與異響,液體輸出均勻。裝置注射精度采用Infutest 2000 型輸液泵分析儀進行測量,分別選取1、3、5 mL/h 3 種注射速度進行采樣間隔為30 s、共計60 min 的流量測量[19]。將預設注射速度與實際注射速度數據匯總后利用流量示值相對誤差公式:δ=(Qi-Q0)/Q0(其中Qi為測試儀所測流速,Q0為受測儀器設定流速,δ為示值相對誤差)計算得到示值相對誤差為4.78%。
以上測試結果表明,本裝置遙控靈敏,驅動波形完全正確,傳動部件能將步進電動機轉子的圓周運動轉化為注射器推桿卡槽的直線運動,裝置控制液體輸注的精準度較高,可以實現對常用藥液進行遙控注射。
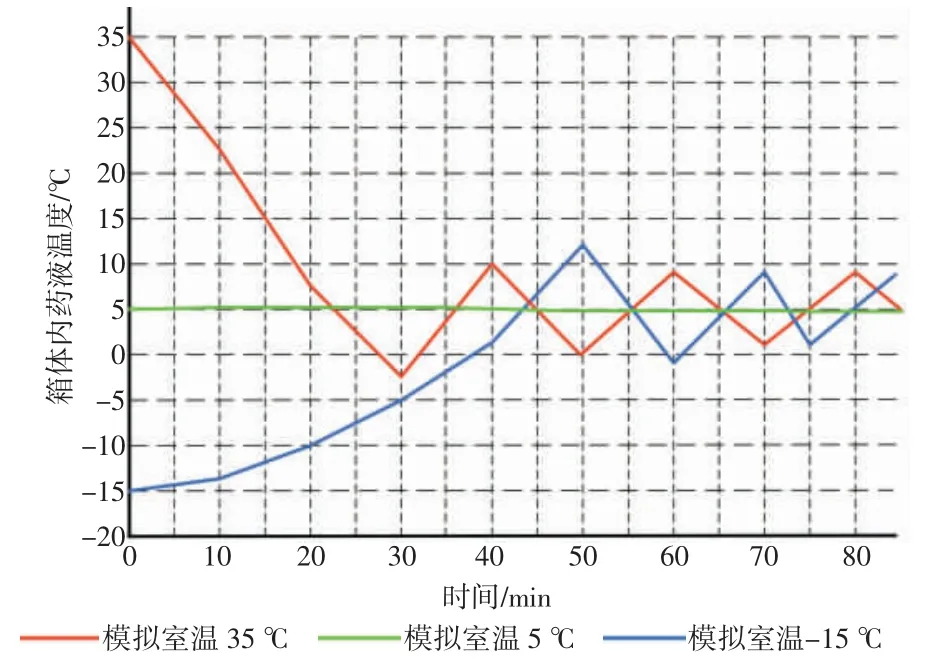
圖14 不同模擬室溫下藥艙內藥液溫度變化曲線
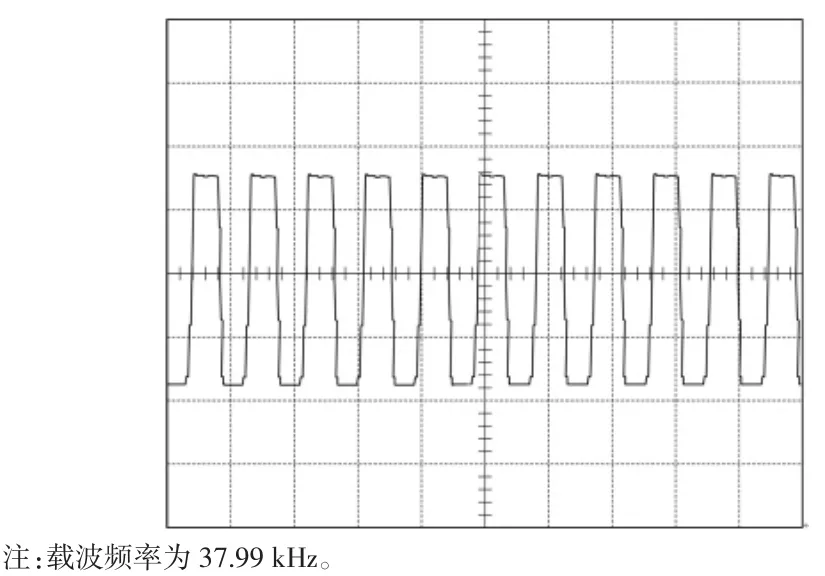
圖15 加載到紅外發射二極管上的載波波形
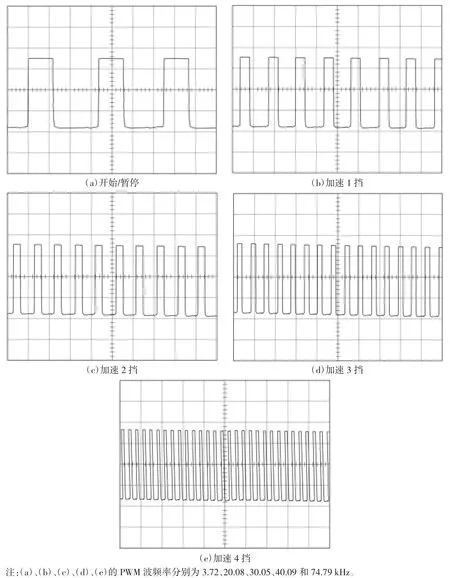
圖16 智能恒溫遙控注射裝置PWM 波波形
4 結語
本裝置實現了最初實驗設計的智能溫控與遙控注射功能,藥液儲存在藥艙內可恒溫保存并可隨時接收遙控指令通過留置針進行注射。經測試,本裝置運行良好、性能穩定,可按預設參數對藥液進行溫控并精準完成開始、暫停、加速、減速、倒退復位等注射指令,液體輸注精度較高。此外,本裝置可駁接一次性注射器,具有方便更換、成本低廉等優點。與傳統手動注射相比,本裝置控制藥液輸注速度更為均勻,并可在各種高危環境下代替人工操作以減少職業暴露次數。操作者可透過隔離玻璃實時觀察注射效果,靈活把控注射藥物總量、注射時機與注射速度。另一方面,在室溫過低的環境下,本裝置可對無溫儲要求的藥液進行加熱后恒溫保存,以避免輸注藥液過于冰冷刺激機體產生不適感,未來可廣泛應用于X 射線造影檢查、臨床治療、生化研究等多個領域。但本裝置尚未進行大規模人體試驗,故其可靠性與穩定性還有待驗證。下一階段研究將進行臨床試驗并著力于結合自動靜脈穿刺機器人技術,不斷改進以助力實現機械完全取代傳統手工注射。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36