結合變化向量分析和直覺模糊聚類的遙感影像變化檢測方法
2021-01-21 02:39:00季欣然黃亮陳朋弟
全球定位系統(tǒng) 2020年6期
關鍵詞:方法
季欣然,黃亮,2,陳朋弟
(1.昆明理工大學 國土資源工程學院,昆明 650093;2. 云南省高校高原山區(qū)空間信息測繪技術應用工程研究中心,昆明 650093)
0 引 言
人類活動和自然界地表生態(tài)演變給全球地表覆蓋帶來了極大變化,實時準確地獲取這些變化信息對研究社會發(fā)展現(xiàn)狀、管理自然資源以及人與自然之間的交互作用有著重要意義[1-4]. 但如何高效實時地監(jiān)測這些動態(tài)變化信息、精確分析這些動態(tài)變化的特點及原因,成為了資源環(huán)境管理保護部門急切需要解決的重點問題之一. 遙感影像變化檢測技術就是對這些動態(tài)變化信息進行監(jiān)測、獲取、分析以及研究的一種非常有效的辦法[5]. 但數(shù)據(jù)(數(shù)據(jù)源、傳感器等)的不確定性、方法的普適性、變化檢測過程及成果的可靠性、變化結果標記的科學性等關鍵技術尚未得到有效解決[6],數(shù)據(jù)獲取和處理的過程中存在的不確定性問題為變化檢測結果帶來了較大影響.
目前圍繞遙感影像變化檢測的不確定性問題主要有兩種解決方法:1)基于統(tǒng)計分析的變化檢測方法;2)基于模糊數(shù)學理論的變化檢測方法[7]. 近年來,基于模糊數(shù)學的遙感影像變化檢測方法已成為了該領域研究熱點,對解決傳統(tǒng)方法中存在的不確定性問題有很好的成效. 如,趙磊等[8]在遙感影像變化檢測非監(jiān)督方法研究中融合了鄰域分析和模糊C均值聚類算法(FCM);Wu C等[9]將FCM應用于核空間同時與非采樣輪廓變換相結合完成了遙感影像變化檢測;Ma W等[10]在FCM算法的基礎上進行改進,提出了粗糙模糊C均值聚類算法(RFCM)并將其用于遙感影像變化檢測; Yan W D等[11]結合頻差理論對FCM進行改進,并將其用于SAR圖像的無監(jiān)督變化檢測; 王建明等[12]結合自適應距離以及模糊拓撲優(yōu)化對模糊聚類變化檢測方法展開了研究; 王峰萍等[13]運用離散小波變換融合差異圖像結合鄰域FCM解決了變化檢測的誤分類問題;劉陸洋等[14]將雙差異圖、主成分分析(PCA)和FCM相結合,以減少噪聲對SAR圖像變化檢測分類結果的影響;張嶺軍等[15]通過引入空間領域信息對傳統(tǒng)的模糊聚類算法進行改進,用于SAR圖像的變化檢測.
以FCM為代表的模糊聚類方法只有一個隸屬度,而直覺模糊聚類則具有直覺指數(shù)、隸屬度和非隸屬度,可以更好地解決變化檢測中存在的不確定性問題[16-17]. 為此,本文引入直覺模糊C均值聚類算法(IFCM)聚類算法,提出了結合CVA和IFCM的多時相遙感影像變化檢測方法(CVA-IFCM).
1 研究方法
假定X1和X2分別為t1、t2兩個時刻獲取的同一區(qū)域大小均為M×N像素、具有相同空間分辨率的兩景高空間分辨率遙感影像,數(shù)據(jù)經嚴格幾何配準. 假定X1={xij(t1),1≤i≤M,1≤j≤N}和X2={xij(t2),1≤i≤M,1≤j≤N},xij(t1)和xij(t2)分別表示兩幅影像數(shù)據(jù)中第i行、第j列像元的灰度值. CVA-IFCM法的步驟包括:1)采用CVA構造差異影像;2)基于IFCM的變化區(qū)域提取;3)變化檢測精度評價,具體流程圖如圖1所示.

圖1 變化檢測流程圖
1.1 變化向量分析(CVA)
CVA是一種常用的多波段遙感影像變化檢測的方法,主要從影像信息的變化強度和變化方向兩個角度進行變化檢測,有效解決了差值法比值法只能用于處理單波段影像這一弊端,增強變化區(qū)域特征信息的同時有效抑制背景信息帶來的干擾[18].
CVA是將t1、t2不同時刻的遙感影像數(shù)據(jù)中相應位置的灰度值進行差值運算來構造新的差值圖像,這些圖像表示了t1、t2不同時刻的遙感影像發(fā)生的變化. 差值圖像中的各位置處的像元灰度值即為變化矢量,其表達式為
(1)

CVA變化強度圖像的灰度值由歐氏距離運算得到,表達式如下:

(2)
式中,DX表示像元的變化強度,通過設定閾值判斷是否發(fā)生變化,像元變化強度在閾值范圍內則認為未發(fā)生變化,超出該范圍則認為發(fā)生變化[20].
1.2 直覺模糊C均值聚類算法(IFCM)
1.2.1 算法原理
假定影像像元灰度值的聚類中心為vs(s=1,…,c). 輸入由CVA獲取的灰度圖像,用IFCM算法輸出像元灰度值對某個聚類中心的模糊隸屬度μs,ij,表示灰度圖像中第i行、第j列像素點的灰度值xij(xij∈[0,255])屬于第s個灰度中心的概率,可以通過求取目標函數(shù)的最小值得到.
IFCM目標函數(shù)

(3)


(4)
式中:πs,ij代表某個聚類中心中樣本數(shù)據(jù)的直覺指數(shù),表示影像數(shù)據(jù)中第i行、第j列像元的灰度值xij對第s個類的猶豫程度;M×N代表像元灰度值的總數(shù).
隸屬度更新公式
(5)

空間函數(shù)

(6)
針對相鄰像素具有相似的特征強度易被歸為同一類這一問題,引入空間函數(shù)hs,ij,表示像元灰度值xij在第s個聚類中的可能性程度;μs,l表示xij的領域像素NB(xij)對第s個聚類中心的模糊隸屬度,當xij大多數(shù)領域像素屬于同一聚類時,則該像素的空間函數(shù)值較高.
FCM算法利用模糊隸屬關系實現(xiàn)對樣本數(shù)據(jù)的分類[21],IFCM是將直覺模糊集運用到FCM算法中得來[22].
直覺模糊隸屬度公式

(7)
模糊隸屬度公式

(8)
式(8)中,vk代表第k個聚類中心.
直覺指數(shù)公式
πs,ij=1-μs,ij-γs,ij,0≤πs,ij≤1.
(9)
式(9)中,γs,ij代表數(shù)據(jù)對某個聚類中心的非隸屬度,表示像元灰度值xij不屬于第s個類的程度.
非隸屬度公式

(10)
0≤μs,ij+γs,ij≤1.
(11)
聚類中心更新公式

(12)
隸屬度差值

(13)

1.2.2 算法流程
本文旨在將CVA構造的差異影像分為變化和未變化兩類,因此對IFCM算法的具體步驟和參數(shù)進行了特定設置,具體如下:
1)明確算法的初始化迭代條件,設置所需參數(shù):模糊指數(shù)m=2、目標函數(shù)精度e、初始隸屬度相對權重p=1、空間函數(shù)相對權重q=3、算法最大迭代次數(shù)100和終止誤差0.05. 設計一個準則函數(shù),選取2個初始聚類中心;
2)加入不確定度參數(shù),將原有的隸屬度矩陣化為模糊隸屬度矩陣;
3)使用替換后的模糊隸屬度矩陣計算各樣本到不同聚類中心的距離,以獲取各樣本的模糊隸屬度,按隸屬度劃分樣本數(shù)據(jù)、分配所屬類;
4)再次計算各樣本到聚類中心的距離以及各個類的聚類中心,使用直覺模糊隸屬度矩陣代替隸屬度矩陣;
5)將各樣本重新劃分至相應的類中;
6)重復1)、3)和4),直至初始定義的準則函數(shù)達到最小值或指定閾值;
7)對圖像中各像素點進行灰度值分類,將迭代后的聚類中心映射到各圖像信息上.
1.2.3 變化檢測精度評價
錯檢率、漏檢率和總體精度是本文對提出的方法的精度進行定量評價的三個指標. 表達式如下:
錯檢率:

(14)
漏檢率:

(15)
總體精度:

(16)
式(14)~(16)中,PF為遙感影像數(shù)據(jù)中未發(fā)生變化卻被錯檢的像元個數(shù);NF為遙感影像數(shù)據(jù)中發(fā)生了變化卻被漏檢的像元個數(shù);M×N為遙感影像數(shù)據(jù)像元個數(shù)的總和;RCD為遙感影像數(shù)據(jù)中發(fā)生變化的像元個數(shù)的總和[23].
2 實驗結果與分析
2.1 實驗數(shù)據(jù)
為印證本文方法的有效性,分別選取2013年、2014年獲取的同一區(qū)域兩景GF-1影像和Szada數(shù)據(jù)集中同一區(qū)域兩景影像作為實驗數(shù)據(jù),如圖2(a)、圖2(b)、圖2(c)、圖2(d)所示. 第一組GF-1影像分辨率為2 m,經多光譜波段與全色波段融合得到,兩景影像大小均為720像素×383像素,均具有近紅外、紅、綠和藍四個波段. 圖2(e)為參考影像,是人工目視解譯獲取得到,其中變化區(qū)域為16 189像素,未變化區(qū)域259 571像素. 第二組數(shù)據(jù)為兩景Szada數(shù)據(jù)集影像,分辨率為1.5 m,兩景遙感影像的大小均為952像素×640像素;圖2(f)為參考影像,通過人工目視解譯獲取得到,其中變化區(qū)域為24 092像素,未變化區(qū)域585 188像素. 對比兩組影像中不同地物光譜信息的變化情況,可以看出主要的變化區(qū)域為農業(yè)用地和建筑物之間的相互轉換.

(a) GF-1 2013年12月 (b) GF-1 2014年12月 采集影像 采集影像

(c) Szada變化前影像 (d) Szada變化后影像

(e)GF-1參考影像 (f) Szada參考影像圖2 原始影像圖
2.2 實驗結果與分析
為了驗證本文方法的可行性和可靠性,選取FCM[21]、FLICM[24]和OTSU[25]方法作為對比實驗.
1) 第一組影像
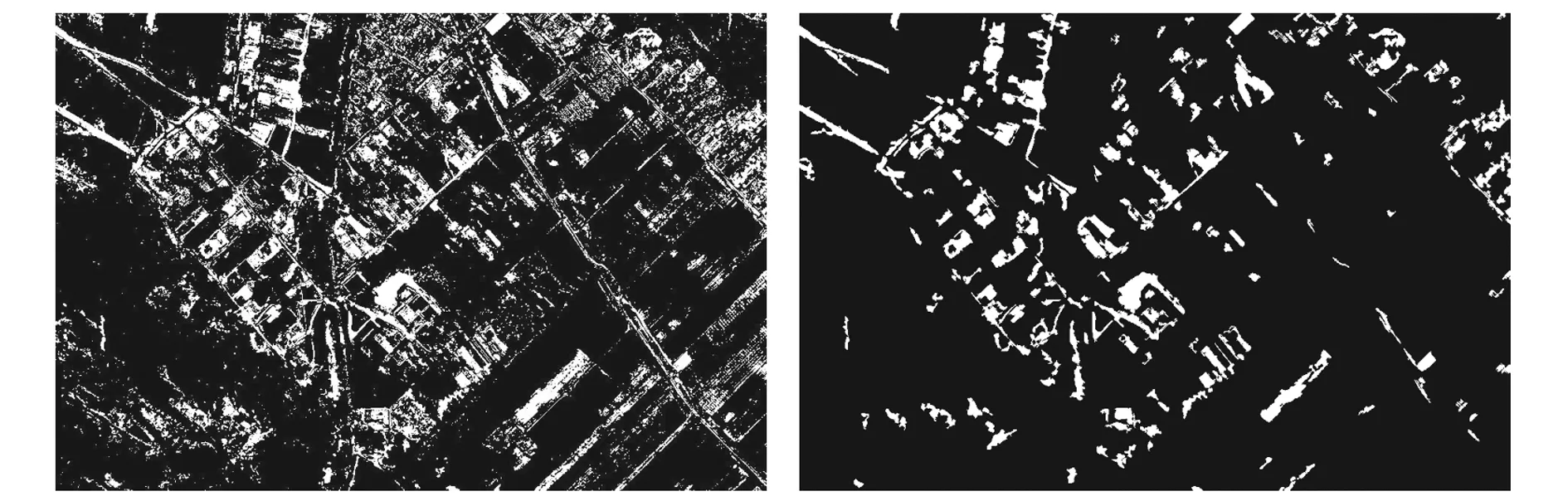
圖3為采用FCM、FLICM、OTSU和本文方法得到的最終變化檢測結果.表1為第一組實驗數(shù)據(jù)經過各種方法進行遙感影像變化檢測得到的錯檢率、漏檢率以及總體精度.

(a) FCM檢測結果 (b) FLICM檢測結果

(c) OTSU檢測結果 (d)本文方法檢測結果圖3 GF-1變化檢測結果圖
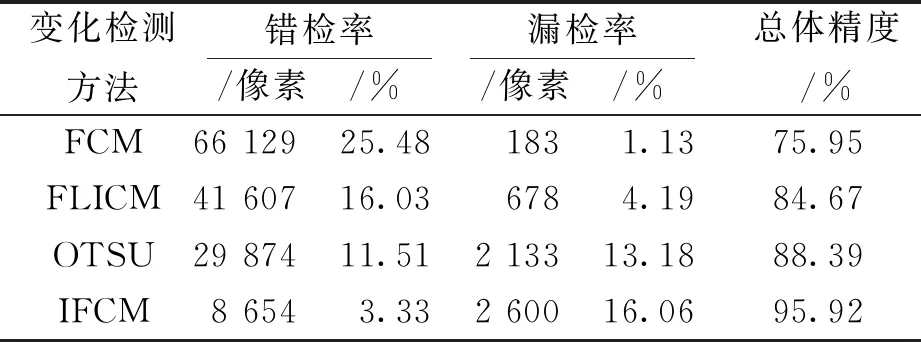
表1 錯檢率、漏檢率以及總體精度
由圖3可以看出,高分辨率遙感影像相較于其他遙感影像,具備愈加豐富的光譜和紋理等特征,存在不同影像中相同地物的差異性加強、不同地物的光譜特征界限不清相互混同等影響,致使影像光譜信息殽雜、光譜域的可區(qū)分性下降,“同物異譜”和“異物同譜”現(xiàn)象在影像中大量涌現(xiàn). 同一地物在兩景影像中的光譜特征不一致,導致大量未變化的道路和建筑物被檢測為變化,采用傳統(tǒng)FCM和FLICM變化檢測方法存在大量的錯檢現(xiàn)象,采用OTSU變化檢測方法雖然減少了錯檢情況,但依然效果不佳;而發(fā)生變化的不同地物由于光譜特征混淆而出現(xiàn)漏檢現(xiàn)象. 采用本文方法錯檢的變化區(qū)域為8 654個像素,錯檢率為3.33%,總體精度達到了95.92%,較好地解決了“同物異譜”帶來的錯檢現(xiàn)象,但由于CVA只考慮了影像的光譜特征而忽略了紋理特征,漏檢情況未能得到很好的控制. 本文方法相較傳統(tǒng)FCM、FLICM和OTSU方法來說,大幅降低了錯檢率,總體精度至多提高了19.97%.
2) 第二組影像
圖4為采用FCM、FLICM、OTSU和本文方法得到的最終變化檢測結果.表2為第二組影像變化檢測結果的錯檢率、漏檢率以及總體精度.

(a)FCM檢測結果 (b)FLICM檢測結果
(c)OTSU檢測結果 (d)本文方法檢測結果圖4 Szada變化檢測結果圖
與第一組影像相比,“異物同譜”和“同物異譜” 現(xiàn)象對檢測結果的影響因為其空間分辨率的提高而增大,各類地物光譜和紋理特征的離散程度被加重. 同時本組影像較第一組影像地物特征更為繁雜,光譜和紋理信息復雜、各地物間的空間相關性更強,信息提取難度增大,故錯檢漏檢現(xiàn)象有所增加. 其中采用FCM方法、FLICM方法和OTSU方法的錯檢現(xiàn)象尤為嚴重,大量未變化的農業(yè)用地、建筑物、道路被檢測為變化. 采用本文方法錯檢的變化區(qū)域為33 889個像素,錯檢率為5.79%,總體精度達到了92.70%. 較好地解決了復雜地物影像中“同物異譜”帶來的錯檢,但同樣受CVA未考慮紋理特征的限制,漏檢情況未能得到很好的控制. 本文方法相較傳統(tǒng)FCM、FLICM和OTSU方法來說,大幅降低了錯檢率,總體精度至多提高了27.7%,是可用于復雜地物影像的有效可行的變化檢測方法.
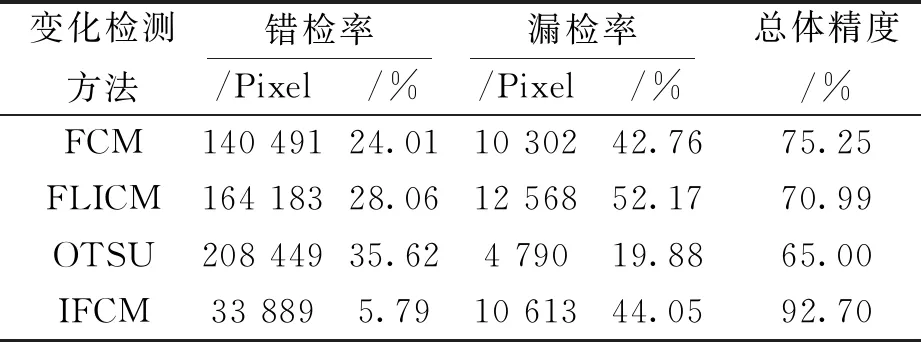
表2 錯檢率、漏檢率以及總體精度
3 結束語
為了解決變化檢測方法過程中存在的不確定性問題,提出了一種CVA-IFCM的遙感影像變化檢測方法. 選取兩組多時相遙感影像作為實驗數(shù)據(jù),以印證本文方法的可靠性和可行性. 實驗結果表明,提出的方法有效降低了錯檢率,具有較高的精度,變化檢測正確率提高到了95.92%和92.70%. 但本文存在以下不足:1)該方法需要設置大量的參數(shù),如何自動選取最優(yōu)閾值還有待進一步研究;2)如何有效地消除“異物同譜”和“同物異譜”問題對高分辨率影像的影響,從而解決漏檢問題,是未來研究的重點.
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56