星載加速度計校準對GRACE軌道動力學平滑的影響分析
2021-01-21 04:46:34高松濤游為范東明余彪生永赟
全球定位系統 2020年6期
關鍵詞:模型
高松濤,游為,范東明,余彪,生永赟
(1.西南交通大學 地球科學與環境工程學院,成都 611756;2.廣東省交通規劃設計研究院股份有限公司測量部,廣州 510507)
0 引 言
近年來,基于星載GPS技術進行低軌衛星精密定軌的研究取得了很大的進展,根據是否采用低軌衛星所受的攝動力模型及與力學模型的關系,可以將定軌方法分為運動學(或稱幾何學)定軌、動力學定軌和簡化(或稱約化)動力學定軌[1-5].
國內外學者均對星載GPS衛星定軌做了深入研究.Yunck[6]等提出不依賴動力學模型的方法,完全基于星載GPS觀測值進行定軌,即幾何法定軌.Schutz[7]等采用動力學定軌得到連續的軌道,但是軌道精度受力模型精度的影響比較大.接著,Yunck和Wu[8]等又提出一種把動力學模型信息和幾何觀測值按一定權重結合起來的動力學定軌模型,稱為約化動力學法.Bertiger[9]等利用美國航空局(NASA)和法國國家空間研究中心(CNES)聯合發射的海洋衛星TOPEX/Poseidon,得到其實際徑向定軌精度為3 cm.在國內,對星載GPS定軌方法的研究也取得了一定的成果.李建成等[10-12]對GRACE衛星進行了軌道計算,并與美國噴氣推進實驗室(JPL)提供的事后精密星歷進行比較,GRACE-A衛星單天非差運動學軌道的徑向精度為3~4 cm,GRACE-B為3~5 cm.郭金運和孔巧麗等[13-16]采用動力學法對HY-2A衛星進行SLR、DORIS精密軌道仿真,發現動力學定軌精度均在厘米級.吳林沖[17]分析了點火脈沖對加速計校準結果的影響,得到其對校準結果的影響在X、Y、Z方向上高達10-10m·s-2.
在動力學定軌中,衛星所受的攝動力對于軌道的影響較大,以上學者在以加速度計代替非保守力攝動的方法中,通常只估計加速度計三個偏差和三個尺度參數,沒有詳細分析各種尺度和偏差參數,以及估計時間對軌道的影響[10-11].
1 定軌策略
首先建立衛星運動的攝動力方程,通過對初始軌道和先驗攝動力模型數值積分得到積分軌道作為參考軌道,然后求解衛星軌道相關偏導數[18-22].
1.1 動力學定軌理論
動力學法定軌的基本原理是將衛星位置和速度視為衛星所受攝動力和衛星初始狀態以及時間的函數,即

(1)

1.2 參數估計策略
SuperSTAR加速度計作為GRACE衛星關鍵有效荷載之一,安裝在GRACE衛星的質心上,用來測定作用于GRACE衛星的非保守力.在衛星運行過程中,儀器本身的物理特性和外部攝動力作用使得加速度計觀測數據產生了偏差和尺度因子變化[23-26],將加速度計校準參數引入衛星動力學模型中,以加速度計測量值代替非保守力模型

(4)
引入加速度計校準參數并將非保守力轉換至慣性系中

(5)

1.2.1 偏差參數模型
(6)
式中:Ci為偏差系數;ΔTi為待估的時間到參數作用起點的時間差;N為所選偏差模型的階數.
1.2.2 尺度參數模型
1) 對角陣常量尺度模型
(7)
式中:SX、SY和SZ分別代表切向、法向及徑向的尺度參數,影響加速度分量在切向、法向、徑向的大小[20].
2) 全矩陣尺度模型

(8)
式中:α、β與γ為對稱剪切參數,表示加速度計軸非正交性之間的關系;ζ、ε與δ為斜對稱旋轉參數,表示科學參考框架(Scientific Reference Framework)與加速度框架(Acceleration Framework)之間的未對準誤差[20,27].
2 不同估計策略下的軌道平滑結果
分析
本文先以JPL發布的2009年5月1日的約化動力學軌道數據作為觀測值,采用動力學方法進行軌道平滑,在優化先驗背景場和每弧段衛星初始狀態的過程中,積分弧長為24 h,衛星初始狀態每弧段校準一次,攝動力模型的優化主要為加速度的校準即尺度改正和偏差改正.
2.1 不同的時間估計策略
首先,分析加速度參數的估計時間對軌道平滑的影響.由于尺度模型和偏差模型對軌道誤差的敏感性不同,尺度參數的估計策略為每弧段估計一次,偏差參數對于軌道加速計的影響較為明顯,不同的估計時間會有明顯的差異,故以偏差參數的估計時間為基準來分析時間對其影響.因積分弧長為24 h,設置偏差參數的估計時長由長到短分別為12 h、6 h、4 h、2 h、1 h、15 min和12 min,分析估計時間對軌道平滑的影響,并實驗得到不同估計時間下所對應最佳的偏差模型,如表1所示,圖1~7為不同偏差參數估計時間下的軌道平滑殘差圖.

表1 不同偏差參數估計時間對應的估計策略

圖1 采用12 h估計策略得到的GRACE衛星2009年5月1日積分軌道與JPL發布的約化動力學軌道的殘差
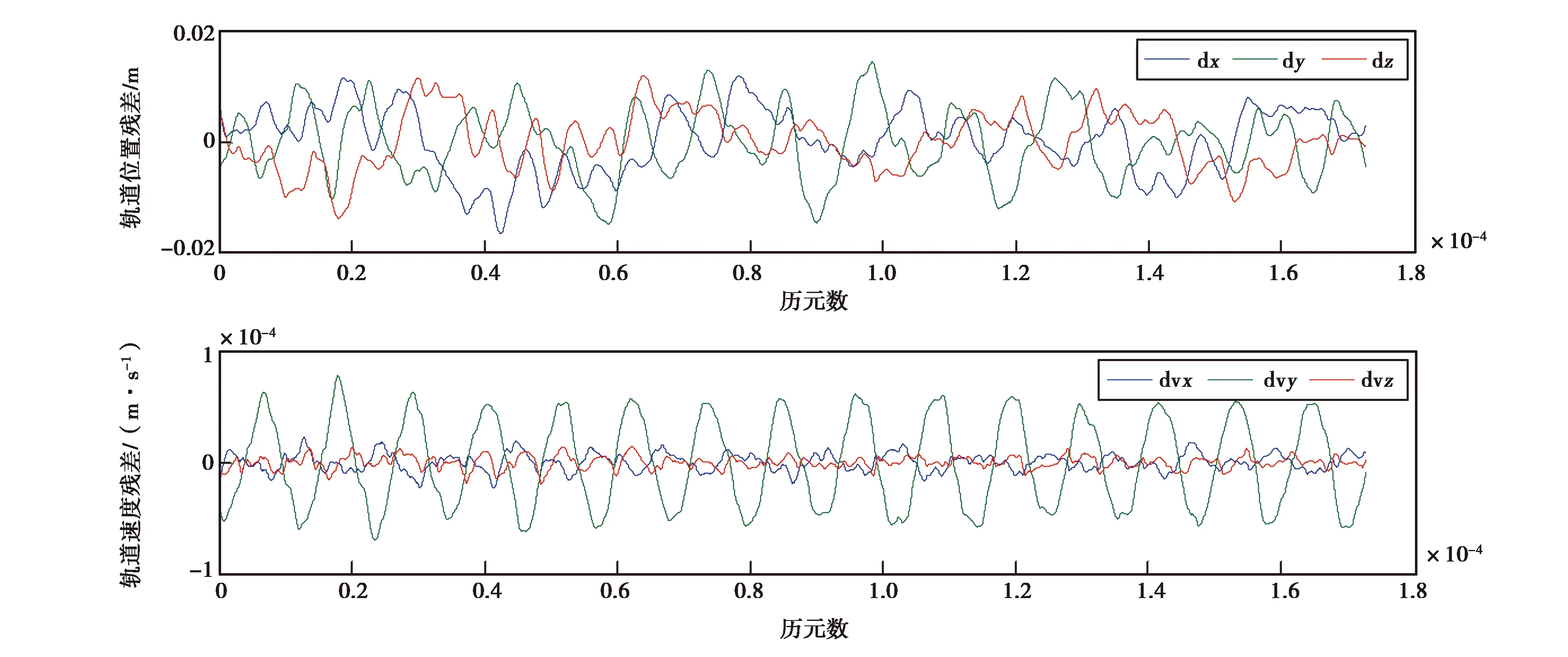
圖2 采用6 h估計策略得到的GRACE衛星2009年5月1日積分軌道與JPL發布的約化動力學軌道的殘差
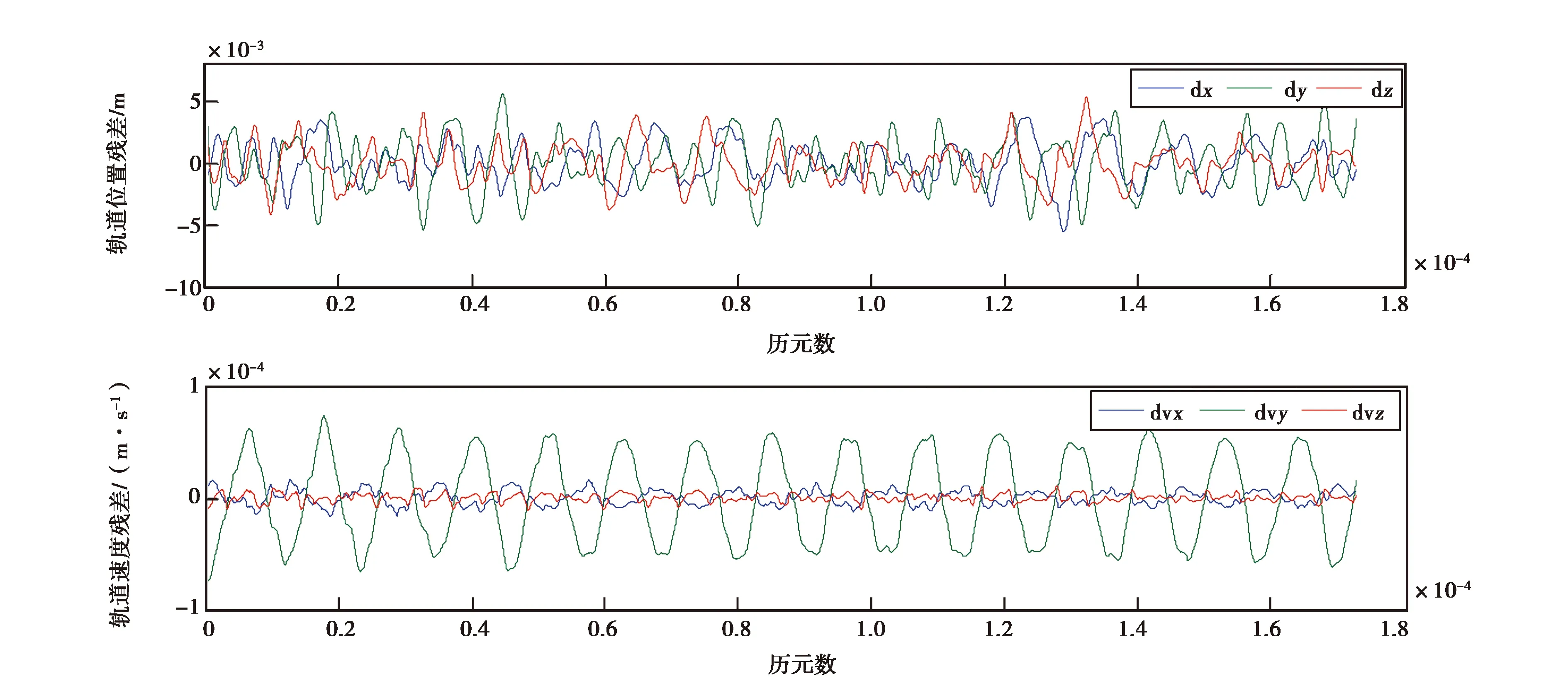
圖3 采用4 h估計策略得到的GRACE衛星2009年5月1日積分軌道與JPL發布的約化動力學軌道的殘差

圖4 采用2 h估計策略得到的GRACE衛星2009年5月1日積分軌道與JPL發布的約化動力學軌道的殘差
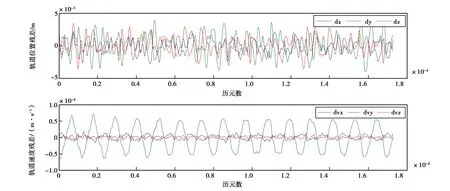
圖5 采用1 h估計策略得到的GRACE衛星2009年5月1日積分軌道與JPL發布的約化動力學軌道的殘差
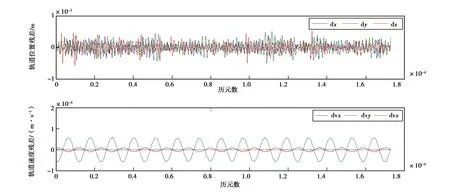
圖6 采用15 min估計策略得到的GRACE衛星2009年5月1日積分軌道與JPL發布的約化動力學軌道的殘差
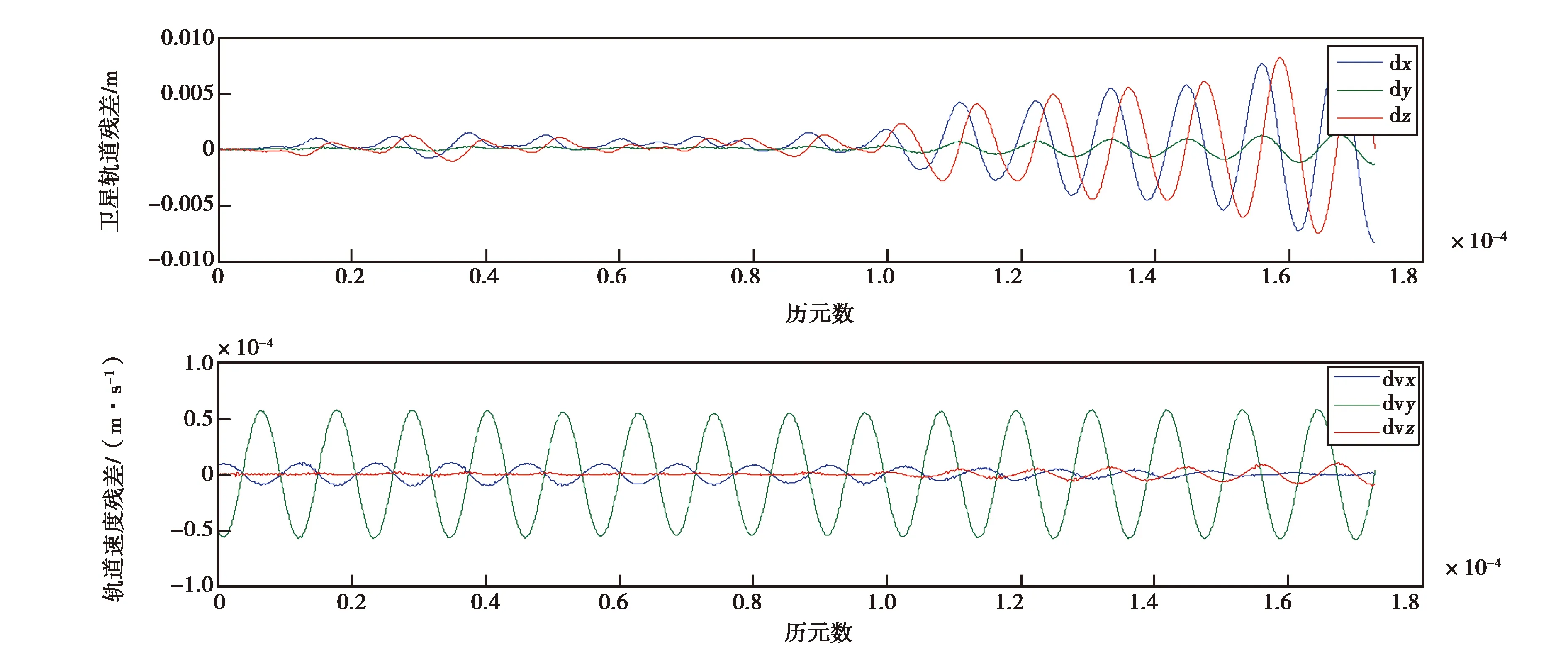
圖7 采用12 min估計策略得到的GRACE衛星2009年5月1日積分軌道與JPL發布的約化動力學軌道的殘差
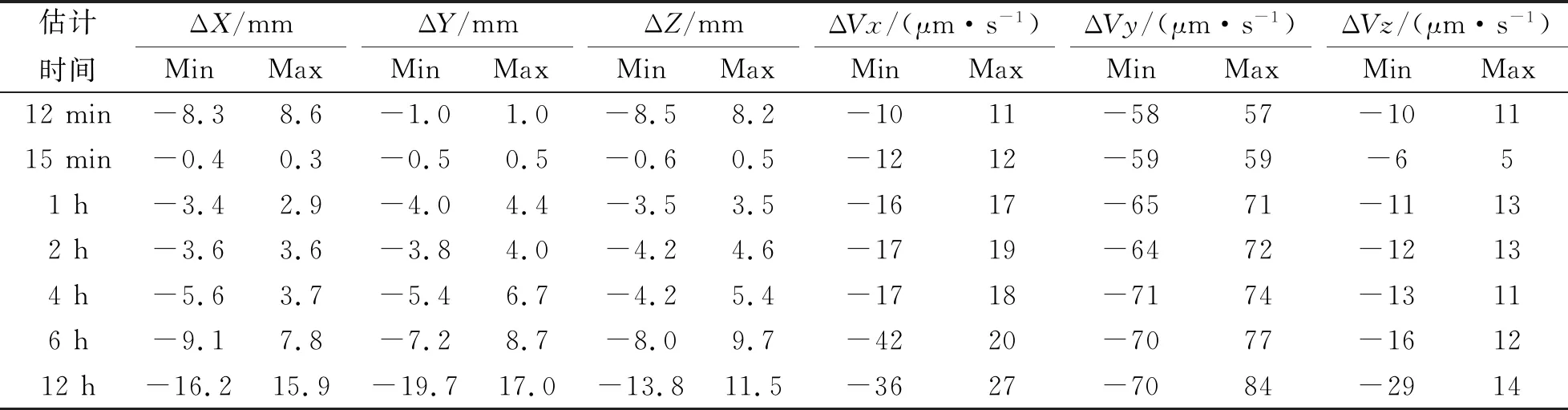
表2 不同偏差參數估計時間得到的軌道位置和速度殘差

圖8 不同時間估計策略對應GRACE衛星軌道殘差分析
表1~2分別表示偏差參數在不同估計時間對應的策略、平滑后的軌道位置和速度殘差,由圖1~7不同策略對應的軌道殘差圖可知,當偏差參數估計時間分別為12 min、15 min、1 h、2 h、4 h、6 h和12 h時,得到三個方向上所對應1天的軌道殘差的范圍分別為:-0.85~0.86 cm、-0.06~0.05 cm、-0.40~0.44 cm、-0.42~0.46 cm、-0.56~0.67 cm、-0.91~0.97 cm、-1.97~1.59 cm.可知偏差參數估計時間大于15 min時,隨著估計時間增加得到平滑后的軌道在X、Y、Z三個方向的軌道殘差逐漸增大,可見偏差參數的估計時間對軌道平滑的影響明顯,估計時間的縮短可很好地吸收攝動力模型的誤差.尺度和偏差參數都是時間的函數,隨著估計時間由12 h至15 min,同弧段偏差參數估計量由20增加到192個,使得每弧段衛星初始狀態和先驗背景場更逼近真值,得到的平滑軌道精度更高.當偏差參數估計時間為12 min時如圖7所示,軌道殘差在X方向、Y方向和Z方向隨著積分時間逐漸增大,此時法方程解算過程存在病態問題,造成解算軌道不可靠.由圖8看出,估計時間大于15 min時三個方向的軌道均方根(RMS)值也隨著估計時間的增加而增大,且Y方向RMS值大于另外兩個方向的RMS值,原因可能在于科學參考框架(SRF)下Y方向上的非保守力對軌道的影響沒有其他兩個方向敏感,因此參數估計時Y方向校準參數精度也最差,得到的軌道殘差也相對較大.
12 h和15 m的偏差模型分別采用高階多項式和低階多項式去估計,軌道殘差如圖1和圖6所示,殘差范圍分別為±2 cm和±0.05 cm.低階多項式短時間估計和高階多項式長時間估計各有優缺點,以高階多項式長時間估計策略的優點是參數相對較少,法方程相對穩定[26],以低階多項式短時間估計策略的優點是可以估計出一些高頻的誤差,得到軌道精度較高.
2.2 不同的尺度模型
對于加速度的校準中尺度參數和偏差參數對于時間是敏感的.在2.1的基礎上,本節主要分析如何選擇合適的尺度模型使動力學平滑后的軌道精度更高.當偏差參數估計時間固定時,以不同的尺度模型為變量進行實驗來分析其平滑后的軌道殘差,如表3所示.平滑結果如圖9~11所示.
表3 不同尺度模型對應的估計策略

圖9 不同時間估計區間下,三種尺度模型積分軌道所對應的X方向的RMS

圖10 不同時間估計區間下,三種尺度模型積分軌道所對應的Y方向的RMS
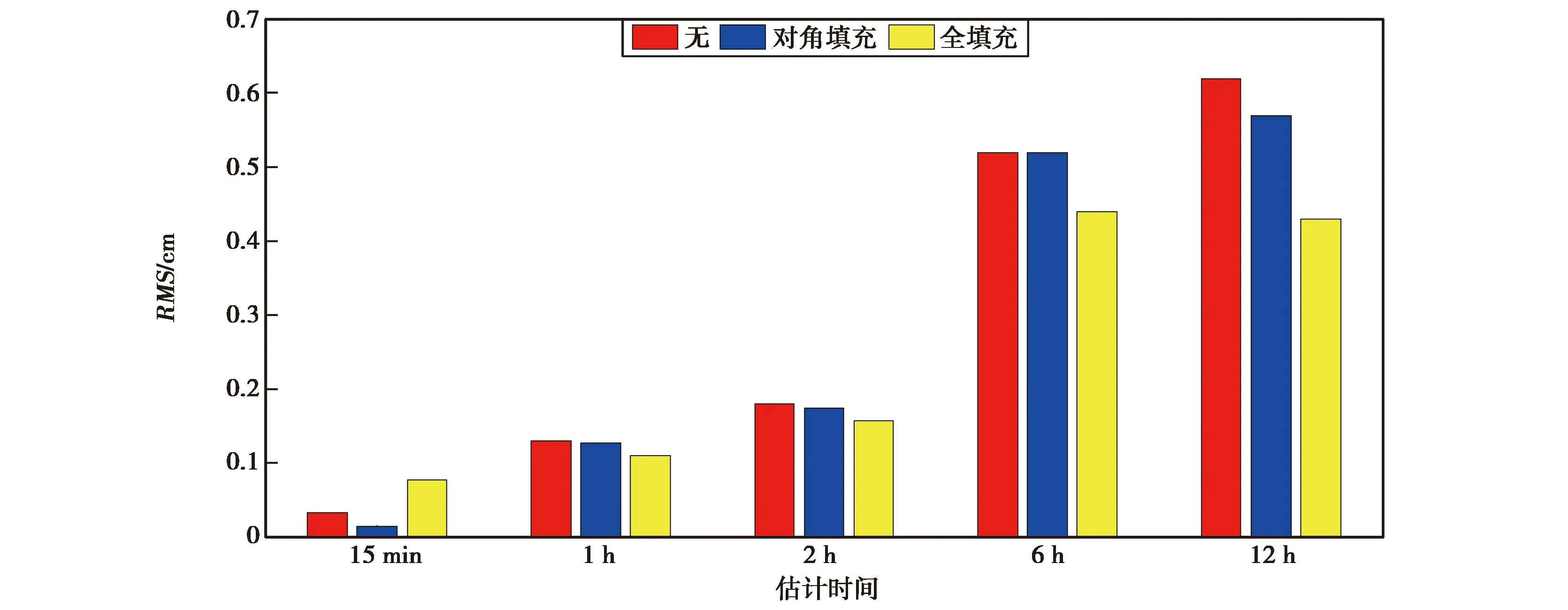
圖11 不同時間估計區間下,三種尺度模型積分軌道所對應的Z方向的RMS
圖9~11分別為X、Y、Z方向上不同偏差參數估計時間下三種尺度模型所對應的軌道RMS值,由圖10可知:在偏差參數估計時間為15 min、1 h、2 h、6 h和12 h時,尺度模型的設置對軌道Y方向影響較小,如估計時間為12 h的軌道在Y方向RMS值在三種尺度影響下分別為0.94 cm、0.91 cm、0.91 cm;估計時間2 h軌道在Y方向的RMS值分別為0.23 cm、0.22 cm和0.21 cm;由圖9~11可知在偏差參數選擇估計時間時,尺度模型對于積分軌道的影響較小,且其影響小于偏差參數估計時間對軌道的影響.當估計時間為15 min時,不考慮尺度模型和對角填充的尺度模型的RMS值小于全填充的尺度模型,尺度模型的設置主要校準加速度計安裝誤差所導致的加速度軸的非正交性[20,27],在加速度校準過程中尺度參數為每弧段24 h估計一次,當偏差參數估計時間較為頻繁時,對于尺度參數的校準會產生影響,故尺度參數不能頻繁的估計.估計時間較長時應采用全填充的尺度模型,估計時間較短可采用對角填充的尺度模型或不考慮尺度參數的影響.
3 對ITSG發布的幾何軌道進行分析
采用ITSG發布的幾何軌道作為觀測數據,來探究以上實驗方法的可行性,并對結果進行詳細分析.上述結論中,得出采用15 min間隔的偏差估計策略得到的軌道與JPL發布的約化動力學軌道殘差和RMS值最小,采用該策略對GRACE幾何軌道進行處理,幾何軌道經不同處理后與JPL發布的約化動力學軌道比較殘差,如圖12~14所示.

圖12 ITSG機構發布的2009年5月1號幾何軌道與JPL發布的約化動力學軌道殘差

圖13 估計策略下積分軌道與JPL發布的2009年5月1號的約化動力學軌道的殘差
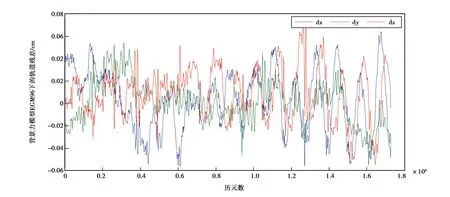
圖14 背景力模型為EGM96下的積分軌道與JPL發布的2009年5月1號的約化動力學軌道的殘差

表4 GRACE衛星軌道RMS值
由圖12~14可知,原始的幾何軌道含有明顯的偶然誤差或者粗差,平滑后的軌道比ITSG的幾何軌道更加平滑且數據是沒有間斷的.由表4可知,平滑后的軌道與JPL約化動力學軌道殘差的均方根誤差在X方向、Y方向和Z方向相較于ITSG幾何軌道均有減小,也證明了實驗數據的結論,即在對GRACE幾何進行平滑的過程中可通過設置加速計尺度參數和偏差參數來提高軌道的精度.圖14為背景重力場模型改為EGM96并采用相同估計策略得到的軌道,當改變背景重力場模型為EGM96時,得到的衛星軌道殘差變大,這是由于EGM96重力場模型與GGM05S重力場模型精度差異造成的,先驗重力場模型對積分軌道影響明顯,只估計尺度和偏差無法有效吸收先驗重力場模型的不足.
4 結 論
在利用動力學法實現GRACE衛星軌道平滑的過程中,驗證了偏差參數估計時間、偏差估計模型及尺度模型對衛星軌道平滑的影響.基于對比分析得出以下結論:
1) 當采用偏差參數估計時間為15 min、尺度模型為對角填充、偏差模型為1階的估計策略對GRACE衛星幾何軌道進行平滑時,得到平滑后的軌道與JPL發布的約化動力學軌道在三個方向的RMS分別為1.89 cm、1.76 cm、1.56 cm,從整體精度看,解算的GRACE軌道的殘差也在cm級.偏差模型的選擇和估計時間對平滑后的軌道影響較大,通過縮短偏差參數估計時間,選擇對角填充的尺度模型的估計策略,可有效削弱幾何軌道的偶然誤差,提高軌道精度.
2) 當偏差估計時間增加時,通過選擇高階的偏差模型,也可提高GRACE幾何軌道平滑的精度.對于估計時間和參數模型兩種條件的影響,估計時間對于軌道平滑的結果影響較為顯著.
3) 對于尺度模型的設置可知,其對軌道的影響小于偏差參數及估計時間對軌道的影響,估計時間較長時應采用全填充的尺度模型,估計時間較短可采用對角填充的尺度模型或不考慮尺度參數對軌道的影響.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19