輪輻結(jié)構(gòu)壓電式六維力傳感器設(shè)計(jì)
2021-01-12 08:35:46徐興盛李映君王桂從
光學(xué)精密工程 2020年12期
關(guān)鍵詞:測(cè)量
徐興盛,李映君,王桂從,孫 選,孫 楊
(濟(jì)南大學(xué) 機(jī)械工程學(xué)院,山東 濟(jì)南250022)
1 引 言
傳感器技術(shù)是一種信息獲取、處理和運(yùn)輸?shù)募夹g(shù),是實(shí)現(xiàn)自動(dòng)化的基礎(chǔ)[1]。六維力/力矩傳感器(以下簡(jiǎn)稱六維力傳感器)能夠精確測(cè)量三維空間任意力系中的三維正交力(Fx,F(xiàn)y,F(xiàn)z)及正交力矩(Mx,My,Mz)[2],是智能機(jī)械實(shí)現(xiàn)力控制信息獲取的關(guān)鍵裝置,被廣泛應(yīng)用于航空航天、工業(yè)智能機(jī)器人和重載制造裝備等領(lǐng)域[3]。
根據(jù)力敏元件測(cè)量原理,六維力傳感器可分為彈性體式和非彈性體式兩類。其中,彈性體式傳感器的典型代表是電阻應(yīng)變式六維力傳感器,該類傳感器出現(xiàn)時(shí)間較早,技術(shù)相對(duì)成熟,應(yīng)用最為廣泛。它通過(guò)彈性敏感元件和應(yīng)變計(jì)將被測(cè)力轉(zhuǎn)換為電阻值的變化,可以測(cè)量應(yīng)力、應(yīng)變等[4-5],具備測(cè)量精度高和測(cè)量效果好的特點(diǎn),但是高靈敏度的實(shí)現(xiàn)會(huì)使其固有頻率降低,導(dǎo)致該類傳感器動(dòng)態(tài)響應(yīng)性能差;而作為非彈性體式代表的壓電式傳感器利用力敏元件的壓電效應(yīng)進(jìn)行測(cè)量,受外界環(huán)境因素的影響較小,有著高精度、高靈敏度以及高固有頻率的特點(diǎn),特別適用于對(duì)固有頻率要求高的場(chǎng)合[6]。
大連理工大學(xué)的孫寶元等最先在國(guó)內(nèi)開展壓電式多向測(cè)力儀研究,為國(guó)內(nèi)壓電測(cè)力傳感器研究奠定了基礎(chǔ)。濟(jì)南大學(xué)李映君等[7-8]提出并聯(lián)分載原理,研制出一種新型自解耦壓電式六維力傳感器并提出了壓電式軸上六維力傳感器的解耦算法。金雷[9-10]等研究了傳感器力敏元件晶片與電級(jí)的接觸剛度對(duì)傳感器整體剛度等性能的影響。張軍等[11]分析了兩種四點(diǎn)支撐空間布局方式的優(yōu)缺點(diǎn),確定了四點(diǎn)支撐六維力傳感器力敏元件的合理布局方式。 重慶大學(xué)的劉俊等[12]設(shè)計(jì)了一種差動(dòng)式壓電六維力傳感器,該傳感器具有結(jié)構(gòu)簡(jiǎn)單、靈敏度及固有頻率高等優(yōu)點(diǎn),但使用環(huán)境對(duì)它的影響較大,穩(wěn)定性低。
無(wú)論是電阻式傳感器還是壓電式傳感器,在測(cè)量過(guò)程中都存在維間耦合,測(cè)量后期需要進(jìn)行大量的解耦計(jì)算,設(shè)計(jì)研發(fā)一種可以屏蔽維間耦合缺陷的六維力傳感器,對(duì)它在各個(gè)應(yīng)用領(lǐng)域的發(fā)展有著突破性的意義,因此本文提出基于并聯(lián)分載原理的八點(diǎn)支撐輪輻式壓電石英六維力傳感器結(jié)構(gòu)形式,并對(duì)其測(cè)量原理進(jìn)行了分析和驗(yàn)證。
2 壓電式六維力傳感器測(cè)量原理
壓電石英是一種單晶體材料,其壓電效應(yīng)由自身晶體結(jié)構(gòu)產(chǎn)生。它的電荷損失量很低,靜態(tài)特性和動(dòng)態(tài)特性均十分良好,可以長(zhǎng)期保存電荷,對(duì)于準(zhǔn)靜態(tài)、靜態(tài)以及動(dòng)態(tài)測(cè)量均有良好表現(xiàn)。按照極化方向的差異可以制作出不同功效的石英晶片,再設(shè)計(jì)合理的疊放方式和晶組布局方案,基于壓電效應(yīng)中的剪切效應(yīng)和縱向效應(yīng)配合作用完成六維力的有效測(cè)量。
通過(guò)研究多點(diǎn)支撐空間布局方案可知:四點(diǎn)支撐菱形布局方案在空間三維力的測(cè)量中維間干擾誤差較小,正方形布局方案在進(jìn)行空間三維力矩測(cè)量時(shí)效果更好。本文基于兩種不同空間布局的四點(diǎn)支撐方案的工作特點(diǎn),提出了一種具備強(qiáng)解耦特點(diǎn)的八點(diǎn)支撐式空布局方式,如圖1所示。八組石英晶組均勻布置在半徑為R 的圓周上,其中菱形布局的1,3,5,7 四組晶組負(fù)責(zé)測(cè)量空間三維應(yīng)力Fx,F(xiàn)y,F(xiàn)z;正方形布局的2,4,6,8 四組石英晶組用于測(cè)量空間三維力矩Mx,My,Mz。安裝時(shí)保證1,3,5,7 晶組的x,y 晶片極化方向與傳感器坐標(biāo)系的X,Y 軸一致,2,4,6,8 晶組的x 晶片極化方向相切于晶組安裝圓周,八組晶組的z 晶片極化方向與傳感器坐標(biāo)系Z 軸一致。
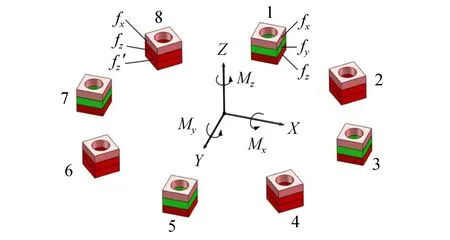
圖1 八點(diǎn)支撐空間布局示意圖Fig. 1 Schematic diagram of eight-fulcrum space layout
基于空間力系平衡和杠桿原理,結(jié)合傳感器的石英晶組空間布局組合方案,推導(dǎo)出傳感器的六維力/力矩測(cè)量公式為:

在上述傳感器進(jìn)行六維力測(cè)量的過(guò)程中,由于采用兩種不同布局的石英晶組分別對(duì)力、力矩進(jìn)行測(cè)量,各測(cè)量支路之間不會(huì)產(chǎn)生干擾,從理論角度分析可知,八點(diǎn)支撐空間布局方案可以有效消除傳感器六維力測(cè)量時(shí)的維間耦合缺陷。
3 壓電式六維力傳感器結(jié)構(gòu)設(shè)計(jì)
傳感器各項(xiàng)性能指標(biāo)的一個(gè)決定性因素就是傳感器的結(jié)構(gòu),結(jié)構(gòu)決定了傳感器的測(cè)量性能及承載能力等指標(biāo)。傳感器預(yù)期量程滿足:Z向載荷量程為60 kN,X,Y向載荷量程為30 kN,Mx,My,Mz向載荷量程為3 kN·m,固有頻率超過(guò)5 kHz。應(yīng)用并聯(lián)分載原理,基于輕量化設(shè)計(jì)原則設(shè)計(jì)出一種輪輻式壓電六維力傳感器結(jié)構(gòu),其三維模型如圖2 所示。
傳感器由上蓋、下蓋、力敏元件和預(yù)緊螺栓組成。上/下蓋都分為內(nèi)分載環(huán)、輪輻機(jī)構(gòu)和外分載環(huán)三個(gè)區(qū)域:輪輻區(qū)域和內(nèi)分載環(huán)均設(shè)有預(yù)緊螺栓安裝孔,外分載環(huán)對(duì)稱開出線孔。石英晶組安裝在輪輻機(jī)構(gòu)位置,通過(guò)預(yù)緊螺栓將傳感器的上蓋、力敏元件及下蓋固定,通過(guò)預(yù)緊螺絲對(duì)傳感器施加預(yù)緊力,消除三者之間的安裝間隙。

圖2 輪輻式壓電六維力傳感器結(jié)構(gòu)三維模型Fig. 2 Three dimensional model of six-axis force piezoelectric sensor with stroke structure
當(dāng)空間外力作用于傳感器上蓋表面,內(nèi)/外分載環(huán)區(qū)域共同起到分載作用,僅使部分外力通過(guò)上蓋的輪輻區(qū)域傳遞至石英晶組表面,這種結(jié)構(gòu)可以防止外力過(guò)大破壞石英晶組。通過(guò)改變傳感器內(nèi)外環(huán)分載環(huán)結(jié)構(gòu)的面積,可調(diào)節(jié)傳感器的量程。
4 仿真分析
有限元分析方法已經(jīng)在模擬求解真實(shí)的工程問(wèn)題中得到廣泛地應(yīng)用[13],為驗(yàn)證傳感器測(cè)量原理的可行性,利用ANSYS 軟件建立傳感器模型并進(jìn)行靜力學(xué)仿真分析。 傳感器各材料參數(shù)如表1 所示,采用自由網(wǎng)格劃分后的有限元模型及六維力加載點(diǎn)如圖3 所示。按照實(shí)際應(yīng)用情況,對(duì)傳感器底面做自由度為零的約束。

表1 模型材料和有限元單元參數(shù)Tab. 1 Model material and element parameters

圖3 六維力壓電傳感器的有限元模型網(wǎng)格劃分Fig. 3 Model meshing of six-axis force piezoelectric sensor
4.1 傳感器靜力學(xué)仿真
4.1.1 軸向力仿真
法向應(yīng)力Fz作用于加載塊表面,如圖3 所示。仿真時(shí)Fz載荷的起始數(shù)值為0 kN,以10 kN的步長(zhǎng)遞增加載,加載10 kN 載荷時(shí)傳感器殼體的等效應(yīng)力如圖4 所示。通過(guò)有限元仿真得出八組石英晶組的三維正交應(yīng)力仿真值,通過(guò)公式(1)計(jì)算得出在法向應(yīng)力作用下,傳感器的六維力測(cè)量結(jié)果,如圖5 所示。

圖4 Fz加載傳感器的等效應(yīng)力云圖Fig. 4 Equivalent stress nephogram of sensor under Fz

圖5 Fz向加載輸入/輸出曲線Fig. 5 Input/output curves under Fz
由圖5 可知,F(xiàn)x,F(xiàn)y與力矩Mx,My,Mz的耦合輸出結(jié)果近似為零,法向應(yīng)力Fz的測(cè)量值隨載荷步遞增,輪輻式壓電六維力傳感器的力/力矩測(cè)量性能良好。
4.1.2 切向力仿真
由于傳感器的X向載荷與Y向載荷是同一種組合的石英晶組進(jìn)行測(cè)量,在理論情況下,兩組載荷仿真具有同樣的變化規(guī)律,所以對(duì)傳感器進(jìn)行Y向應(yīng)力仿真,加載方式如圖3 所示。仿真時(shí)Y向載荷以0 kN 為起始載荷,以5 kN 的步長(zhǎng)遞增加載,加載5 kN 載荷時(shí)傳感器殼體的應(yīng)力云圖如圖6 所示,得出八組晶組的仿真數(shù)據(jù)并計(jì)算出傳感器的六維力仿真結(jié)果,如圖7 所示。

圖6 Fy加載傳感器的等效應(yīng)力云圖Fig. 6 Equivalent stress nephogram of sensor under Fy
由圖7 可知,應(yīng)力Fx,F(xiàn)z以及力矩My,Mz的耦合輸出均近似為零,切向應(yīng)力Fy的測(cè)量值隨步進(jìn)載荷線性增大,靈敏度較高在切向載荷的作用下,Mx耦合測(cè)量值較大,但不影響傳感器的測(cè)量。

圖7 Fy加載輸入/輸出曲線Fig. 7 Input/output curves under Fy
4.1.3 彎矩仿真
如圖3 所示,基于應(yīng)力測(cè)量坐標(biāo)系在標(biāo)定桿對(duì)稱位置加載大小相同、方向相反的軸向應(yīng)力載荷Fz與-Fz產(chǎn)生扭矩載荷My。兩加載點(diǎn)間距為250 mm,My載荷由0 kN·m 遞增至3 kN·m,My載荷為1 kN·m 時(shí)傳感器的等效應(yīng)力如圖8 所示,得出8 組晶組的仿真數(shù)據(jù)并計(jì)算出傳感器的六維力仿真結(jié)果,如圖9 所示。
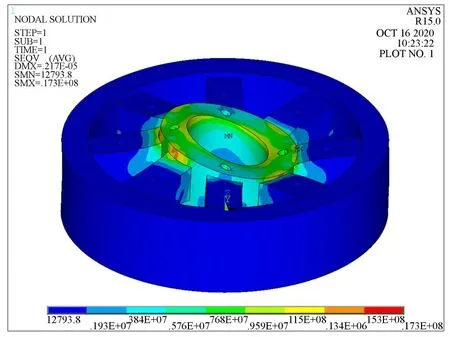
圖8 My加載傳感器的等效應(yīng)力云圖Fig. 8 Equivalent stress nephogram of sensor under My
由圖9 可知,空間三向力和力矩Mx,Mz的耦合輸出均近似為零,未影響彎矩My的測(cè)量結(jié)果。My仿真輸出隨著載荷的增大而增大,且呈現(xiàn)出良好的線性。
4.1.4 扭矩仿真
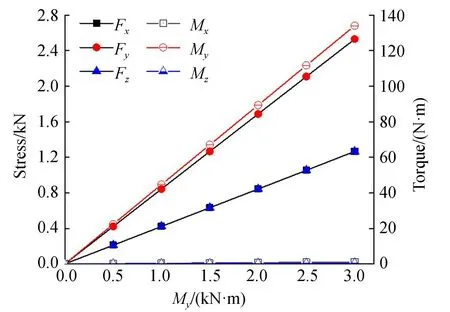
圖9 My加載輸入/輸出曲線Fig. 9 Input/output curves under My
如圖3 所示,基于應(yīng)力測(cè)量坐標(biāo)系在標(biāo)定桿對(duì)稱位置加載大小相同、方向相反的切向應(yīng)力載荷Fy與-Fy產(chǎn)生扭矩載荷Mz,Mz載荷由0 kN·m遞增至3 kN·m,My為1 kN·m 時(shí)傳感器的等效應(yīng)力如圖10 所示,得出八組晶組的仿真數(shù)據(jù)并計(jì)算出傳感器的六維力仿真結(jié)果,如圖11 所示。

圖10 Mz加載傳感器的等效應(yīng)力云圖Fig. 10 Equivalent stress nephogram of sensor under Mz

圖11 Mz加載輸入/輸出曲線Fig. 11 Input / output curve under Mz
由圖11 可知,三向力Fx,F(xiàn)y,F(xiàn)z耦合輸出均近似為零,這與理論設(shè)想一致,證明八點(diǎn)支撐布局方式及測(cè)量原理合理可行。力矩Mx,My的耦合近似為零,扭矩Mz測(cè)量值隨著扭矩載荷的增大而增大,線性良好。
4.2 仿真誤差分析
在Y向力仿真過(guò)程中,力加載位置平面與傳感器約束面存在一個(gè)高度差h,如圖3 所示,對(duì)傳感器產(chǎn)生類似Mx的彎矩載荷加載,所以Mx方向有一定的耦合誤差,與傳感器結(jié)構(gòu)本身無(wú)關(guān)。輪輻式壓電六維力傳感器的耦合輸出及其他誤差均由標(biāo)定夾具以及應(yīng)力加載方式產(chǎn)生,其各項(xiàng)性能指標(biāo)均呈良好狀態(tài),仿真分析表明輪輻式壓電六維力傳感器方案合理可行。
4.3 傳感器動(dòng)力學(xué)仿真
對(duì)壓電式力傳感器來(lái)說(shuō),固有頻率是與動(dòng)態(tài)響應(yīng)有關(guān)的主要參數(shù),是傳感器應(yīng)用中倍受關(guān)注的性能指標(biāo)之一,可以用來(lái)確定傳感器的動(dòng)態(tài)測(cè)量量程,對(duì)傳感器進(jìn)行模態(tài)仿真得到傳感器的前六階振型如圖12 所示,模態(tài)數(shù)據(jù)如表2 所示。
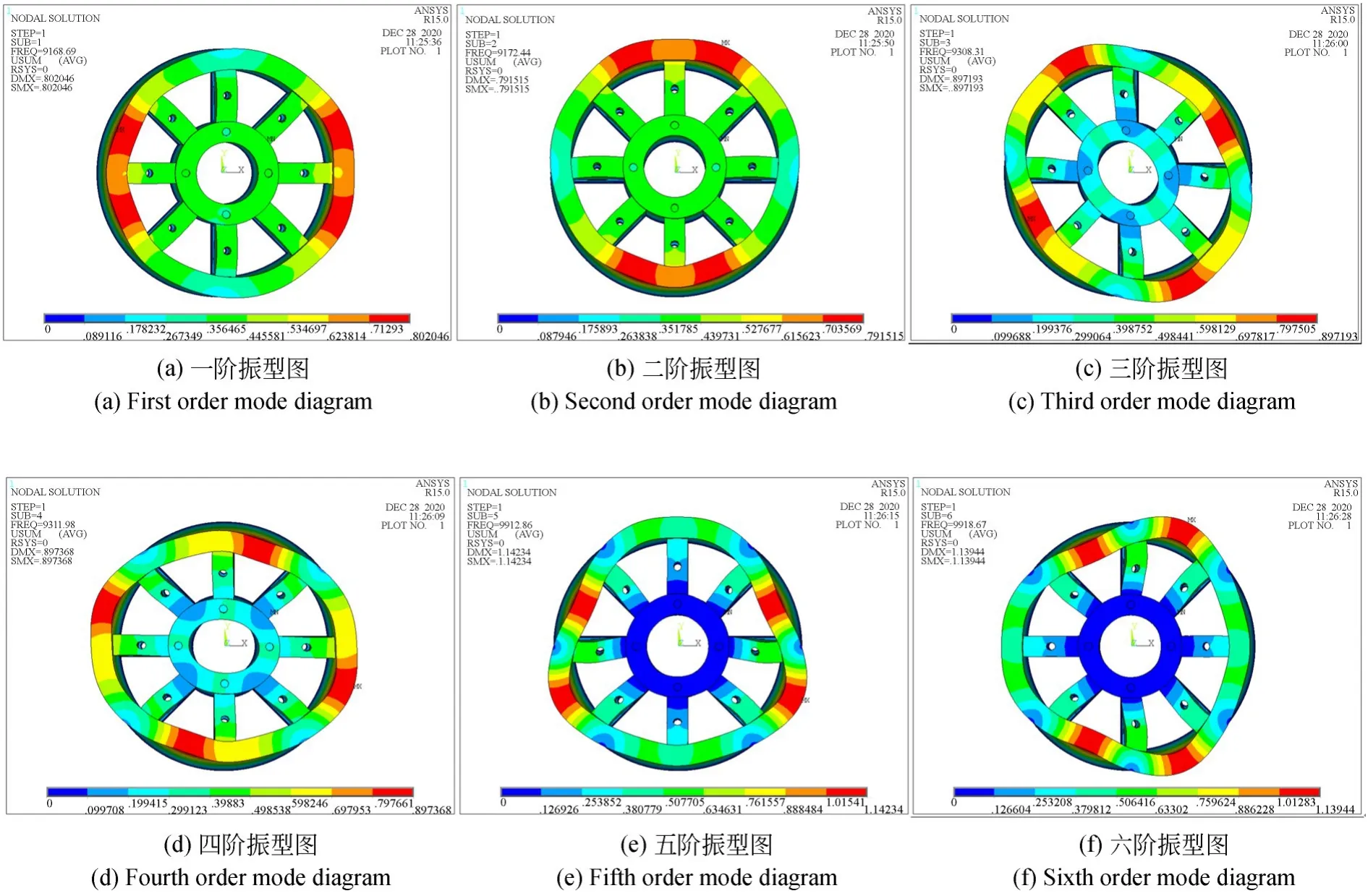
圖12 六維力壓電傳感器前六階振型圖Fig. 12 Sixth-order vibration modes of six-axis force piezoelectric sensor

表2 傳感器模態(tài)數(shù)據(jù)Tab. 2 Modal data of six-axis force piezoelectric sensor
5 標(biāo)定實(shí)驗(yàn)
5.1 傳感器準(zhǔn)靜態(tài)標(biāo)定實(shí)驗(yàn)
在前期理論研究的基礎(chǔ)上,完成輪輻式壓電傳感器樣機(jī)的研制。傳感器材料與仿真所選材料一致,安裝石英晶組,通過(guò)預(yù)緊螺栓施加3 kN的預(yù)緊力,消除安裝間隙。六維力傳感器靜態(tài)測(cè)量平臺(tái)如圖13 所示。該平臺(tái)主要由六維力傳感器靜態(tài)標(biāo)定實(shí)驗(yàn)裝置、高速數(shù)據(jù)采集卡(美國(guó)DT-9804 型)、電荷放大器(江蘇聯(lián)能YE-5850型)、傳感器樣機(jī)、數(shù)據(jù)預(yù)處理電路(揚(yáng)州科動(dòng)KD-5401 型)和PC 端組成。

圖13 六維力傳感器靜態(tài)標(biāo)定實(shí)驗(yàn)平臺(tái)Fig. 13 Static calibration experimental platform of six-axis force piezoelectric sensor
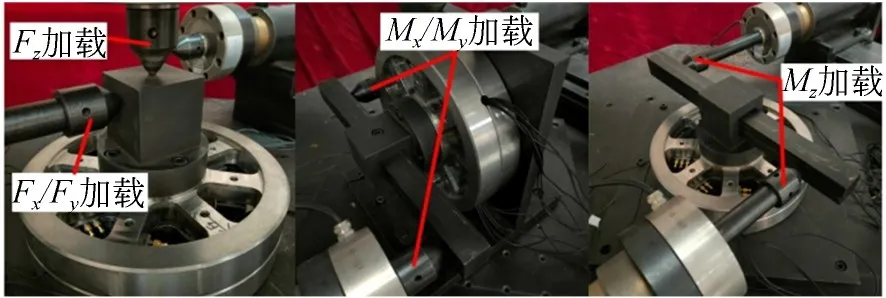
圖14 加載方式示意圖Fig. 14 Schematic diagram of loading modes


圖15 三向力加載標(biāo)定曲線Fig. 15 Calibration curves under three dimensional forces

圖16 三向力矩加載標(biāo)定曲線Fig. 16 Calibration curves under three dimensional torques
采用等距逐步加載的方法對(duì)傳感器進(jìn)行靜態(tài)標(biāo)定,實(shí)際加載方式如圖14 所示,X,Y向載荷以5 kN 的步長(zhǎng)遞進(jìn)加載至30 kN,Z向載荷以10 kN 的步長(zhǎng)遞進(jìn)加載至60 kN,重復(fù)進(jìn)行3 次加載實(shí)驗(yàn),得出實(shí)驗(yàn)數(shù)據(jù)并取平均值,實(shí)驗(yàn)結(jié)果如圖15 所示。傳感器X,Y,Z向力測(cè)量具備良好的線性輸出,耦合輸出近似為零。
如圖14 所示加載方式對(duì)傳感器進(jìn)行彎矩Mx,My及扭矩Mz的標(biāo)定,基于應(yīng)力測(cè)量坐標(biāo)系在標(biāo)定桿對(duì)稱位置加載相同大小、相反方向的應(yīng)力載荷產(chǎn)生力矩載荷,加載力以2 kN 的步進(jìn)載荷遞增加載,加載點(diǎn)距離250 mm,施加的力矩載荷由0 kN·m 遞增至3 kN·m,重復(fù)3 次加載實(shí)驗(yàn)取平均值,實(shí)驗(yàn)結(jié)果如圖16 所示。傳感器耦合輸出近似為零,隨著力矩載荷的增加,傳感器輸出電壓值近似呈線性增加,表明傳感器彎/扭矩測(cè)量線性輸出良好,結(jié)構(gòu)方案切實(shí)可行。傳感器的主要性能參數(shù)如表3 所示。

表3 傳感器主要指標(biāo)對(duì)比Tab. 3 Comparison of main indicators of sensors
5.2 傳感器動(dòng)態(tài)標(biāo)定實(shí)驗(yàn)
因?qū)嶒?yàn)條件限制,選擇沖擊響應(yīng)法對(duì)傳感器進(jìn)行動(dòng)態(tài)標(biāo)定。用力錘敲擊傳感器表面,傳感器受力輸出的電荷信號(hào)通過(guò)電荷放大器轉(zhuǎn)化為電壓信號(hào),高速數(shù)據(jù)采集卡獲取數(shù)據(jù)并存入PC 中,利用數(shù)據(jù)采集軟件進(jìn)行傅里葉變換分析,得到相應(yīng)激勵(lì)方向的固有頻率參數(shù)。搭建的動(dòng)態(tài)標(biāo)定實(shí)驗(yàn)平臺(tái)如圖17 所示,得出的動(dòng)態(tài)實(shí)驗(yàn)結(jié)果如圖18 所示,滿足六維力傳感器固有頻率為5 kHz 的測(cè)量需求,表明傳感器具備良好的動(dòng)態(tài)測(cè)量性能。

圖17 六維力傳感器動(dòng)態(tài)標(biāo)定實(shí)驗(yàn)平臺(tái)Fig. 17 Dynamic calibration experimental platform of sixaxis force piezoelectric sensor
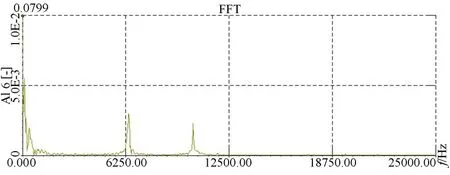
圖18 六維力傳感器傳感器的動(dòng)態(tài)標(biāo)定結(jié)果Fig. 18 Dynamic calibration results of six-axis force piezoelectric sensor
靜態(tài)標(biāo)定及動(dòng)態(tài)標(biāo)定的結(jié)果表明,傳感器結(jié)構(gòu)滿足預(yù)期效果,輪輻式結(jié)構(gòu)可以有效屏蔽維間耦合,非線性度<1%,測(cè)試精度較高,固有頻率超過(guò)6 kHz,滿足動(dòng)態(tài)測(cè)量需求。仿真結(jié)果與實(shí)驗(yàn)結(jié)果對(duì)比可知,仿真曲線和測(cè)量曲線具備相同的變化趨勢(shì),而仿真結(jié)果是理想情況下的測(cè)量輸出,可以為傳感器的設(shè)計(jì)提供參考依據(jù)。
6 結(jié) 論
本文針對(duì)工業(yè)機(jī)器人對(duì)六維力傳感器的需求,基于并聯(lián)分載原理及多點(diǎn)測(cè)量原理提出了一種八點(diǎn)支撐式布局測(cè)量方案,設(shè)計(jì)出一種可消除維間耦合的八點(diǎn)支撐輪輻式壓電六維力傳感器。基于參數(shù)化建模,結(jié)合八點(diǎn)支撐空間布局方案及其測(cè)量原理設(shè)計(jì)了準(zhǔn)靜態(tài)/動(dòng)態(tài)性能仿真實(shí)驗(yàn),利用ANSYS 軟件分別對(duì)輪輻式壓電六維力傳感器在空間不同載荷作用下的測(cè)量性能及動(dòng)態(tài)性能進(jìn)行了仿真分析。由于有限元模型采用四面體網(wǎng)格劃分,仿真結(jié)果出現(xiàn)輕微耦合輸出,但不影響傳感器測(cè)量過(guò)程。
最后加工傳感器樣機(jī)并搭建靜態(tài)六維力測(cè)試平臺(tái)對(duì)傳感器進(jìn)行靜態(tài)標(biāo)定及動(dòng)態(tài)標(biāo)定實(shí)驗(yàn)。標(biāo)定實(shí)驗(yàn)結(jié)果表明,輪輻式壓電六維力傳感器測(cè)量結(jié)果線性度良好,維間干擾<4%,可以有效測(cè)量六維力,傳感器自身固有頻率滿足動(dòng)態(tài)測(cè)量需求。 傳感器晶組安裝過(guò)程中的位置偏差、其自身厚度不一以及加載點(diǎn)的偏差都會(huì)導(dǎo)致實(shí)驗(yàn)數(shù)據(jù)出現(xiàn)耦合,不過(guò)實(shí)驗(yàn)維間干擾屬于正常的實(shí)驗(yàn)誤差。 仿真及實(shí)驗(yàn)結(jié)果表明,該輪輻式壓電六維力傳感器的設(shè)計(jì)方案合理可行,為其他類型壓電六維力傳感器的設(shè)計(jì)提供了重要的參考依據(jù)。
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級(jí)版)(2015年4期)2015-04-29 00:00:00