基于支持向量回歸機的機器人定位精度提高
2021-01-12 08:35:42于連棟常雅琪趙會寧曹家銘姜一舟
光學精密工程 2020年12期
于連棟,常雅琪,趙會寧*,曹家銘,姜一舟
(1. 合肥工業大學 儀器科學與光電工程學院,安徽 合肥230009;2. 測量理論與精密儀器安徽省重點實驗室,安徽 合肥230009)
1 引 言
隨著機器人技術的快速發展,工業機器人廣泛應用于自動化、先進制造等領域。機器人具有較好的重復定位精度,但絕對定位精度較差,使其適用范圍受到了嚴重的限制。因此,如何進一步提高機器人的絕對定位精度成為研究的焦點。目前,解決上述問題主要有兩種方式:提高機器人的加工和裝配精度,以增加開發成本為代價,更新速度較慢,難以滿足生產需要;采用數學方法修正結構參數與非結構參數的誤差,在不增加任何成本情況下,能夠有效地提高機器人的絕對定位精度。
機器人結構參數標定通常包括建模、測量、參數辨識和補償4 個步驟。 1995 年Denavit 和Hartenberg 提出D-H 建模,并被廣泛應用于機器人建模[1]。Samad 等提出5 參數MD-H 模型[2],改進了D-H 模型相鄰兩個關節平行時產生奇異的問題。在測量方面,激光跟蹤儀[3]、視覺跟蹤系統[4]和球桿儀[5]等能夠實現高精度測量,為誤差修正提供標準量。 在參數識別方面,最小二乘法[6]具有原理簡單和計算量大的特點,LM 算法[7]、擴展卡爾曼濾波[8]等是經典的解決方法。然而,基于機器人運動學的建模僅能部分修正機器人的制造和裝配誤差,因此,結構參數誤差的占比不同,補償效果在整個空間不均勻,修正效果受到限制。
非結構參數誤差主要受桿件變形、溫度等方面的影響。Lubrano 等[9]通過在機器人上布置溫度傳感器測量其自身溫度,實現了溫度補償。Gong 等[10]研究了連桿柔性以及溫度對機器人的影響,連桿溫度的升高造成零件的膨脹,重力與載荷使連桿變形,難以直接消除。Nguyen 等[11]通過將參數辨識后的殘差作為ANN 模型的輸出,關節轉角作為輸入,建立了機器人非結構參數誤差修正模型。部分學者通過將結構參數與非結構參數誤差當做整體,統一考慮,為機器人標定提供了新的思路。Zeng 等[12]對機器人誤差進行分析,提出了基于誤差相似性的精度補償方法。Guanbin 等[13]采用BP 神經網 絡與粒 子群算法混合,搜索最優變量,以補償運動學參數的誤差。趙俊偉等[14]采用空間差值法,自動調用之前庫內補償值進行補償。
相對于上述方法,支持向量回歸機(Support Vector Regression,SVR)整體考慮結構與非結構參數誤差,將低維非線性自變量空間,轉至高維特征空間,使其實現可線性規劃的學習系統。同時,引入損失參數減小隨機誤差對預測模型的影響,能夠通過較少的訓練樣本獲得較強的泛化能力,不易陷入局部最優,結構更簡單,學習效果更好[15-16]。
機器人的桿件變形、溫度變形等因素引起的非結構參數誤差會隨著機器人在工作空間的運動,產生一定規律的變化。網格劃分便成為解決這類問題的有效途徑,王一等[17]提出了扇形網格劃分方法,周煒等[18]采用網格劃分的方法實現了機器人結構參數與非結構參數的誤差修正。
本文采用Universal robot 公司的UR5 機器人作為研究對象,采用MDH 模型為基礎,通過對工作空間進行網格劃分,并利用SVR 方法建立機器人轉角與機器人誤差之間的關系模型,以實現網格內絕對定位誤差的補償。
2 機器人運動模型
機器人運動學建模的經典方法是D-H 模型[1],根據D-H 模型的描述,關節之間的轉換可以用4 個結構參數進行描述。這4 個結構參數是連桿長度a,連桿偏距d,連桿繞X 軸旋轉轉角α,以及關節轉角θ。
采用如圖1 所示的UR5 機器人作為研究對象,共有6 個轉動關節,其中有兩相鄰關節旋轉軸系處于平行狀態,D-H 模型存在著病態性。為了克服這類問題,MDH 模型在D-H 模型的基礎上增加了繞Y 軸的轉動量β。在相鄰關節不平行時,β=0,僅當兩相鄰關節平行時存在β。如圖2所示,采用MDH 模型可以獲得機器人相鄰連桿的坐標轉換關系,以確定最末端坐標值。連桿之間的轉換關系為:
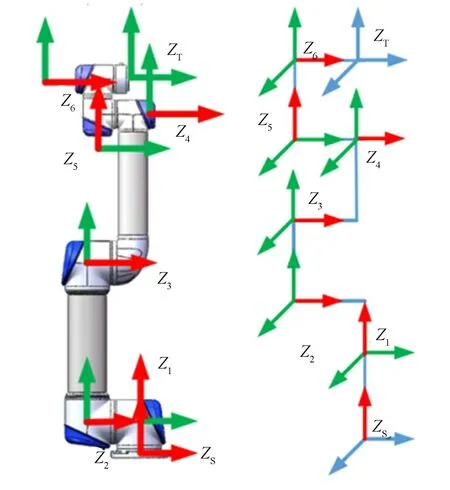
圖1 UR5 機器人關節坐標系示意圖Fig. 1 Schematic diagram of UR5 robot coordinate system

圖2 MDH 模型連桿坐標系Fig. 2 Linkage coordinate system of MDH model

對于n自由度轉動機器人,末端位姿是各個連桿變換矩陣的乘積。機器人運動學模型為:
機器人末端工具的實際位置P=[Px Py Pz]T。由于各參數的理論值與實際值存在一定的偏差,所以機器人末端位置的實際值與理論值也不同,存在定位誤差e=P-P′,其單點絕對定位誤差在笛卡爾坐標系中存在3 個方向的距離誤差ei∈R3。
3 支持向量回歸機理論
假 設 一 個 樣 本 集{(x1,y1),(x2,y2),…,x}(xm,ym) ,其中xi∈Rn作為樣本集自變量,yi∈R表示樣本集因變量。 使用非線性映射將數據{x1,x2,…,xm}映射到高維空間F,再在高維空間進行線性擬合。因此可以將函數關系式用公式(3)表達:

式中:w是將樣本數據映射到高維空間之后對應的權重向量,b被稱為偏置項。
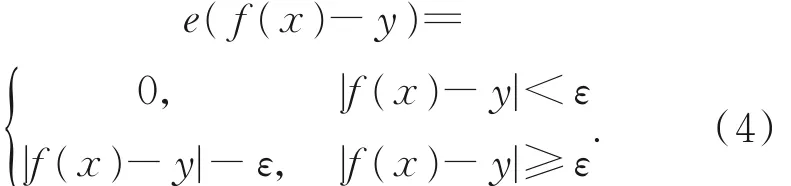
在利用SVR 進行計算時,會引入參數ε的不敏感損失函數度量,如式(4)所示。若回歸函數誤差小于損失參數ε,忽略對回歸結果的影響,盡可能包含更多數據點。
根據樣本估計出回歸函數f(x),使得yi與f(x)的差值都很小,將問題轉化為:

式(5)作為目標函數。考慮到部分樣本不能被正確分類,引入松弛因子ξi,ξi*≥0,懲罰因子C>0,表示大于ε的樣本懲罰程度。式(5)是一個二次規劃問題,只要優化求解方法滿足KKT條件,通常采用Lagrange 對偶問題解決方法,以及Lagrange 乘數法。引入拉格朗日乘子αi和α*i,將目標函數轉化為:
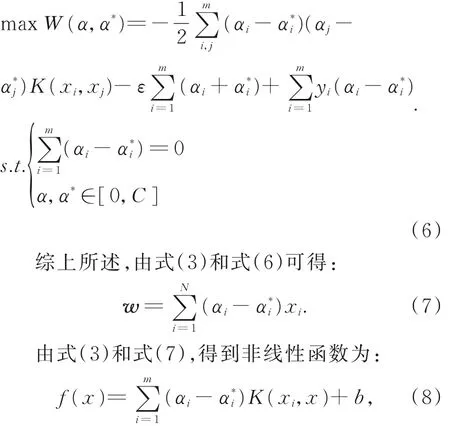
式中K(xi,xj) 為核函數。通過選擇合適的核函數,不僅能提高預測模型的精度,而且能降低隨機噪聲對預測模型的影響和運算量。目前,常用的核函數及其特點如下:多項式函數,維數過高時其計算復雜度增加;線性函數,適用于輸入輸出維度相同的訓練模型;sigmoid 函數,類似于多層神經網絡的結構,具有一定的局限性;徑向基函數(Radial Basis Function,RBF),對樣本要求低、應用廣泛、靈活性高。由于機器人輸入輸出維度不同以及模型復雜度高,選擇RBF 進行訓練,具體表達式為:

通過指數關系,將輸入樣本空間映射到無限維空間,從而實現高精度非線性擬合。
4 機器人單點標定誤差模型
具有旋轉關節的n-DOF(Degree of Freedom)機器人采樣樣本m個,建立樣本集{(θ1,e1),(θ2,e2),…,(θm,em) }T,θ∈Rn,為機器人n個轉角數值,ei為對應在直角坐標系中的誤差值。具有n旋轉關節的機器人的末端位置誤差可以表示為:ei=E(θ)=ωi,1θi,1+ωi,2θi,2+ …+ωi,nθi,n,(10)式中:ei= [exi eyi ezi]T,是機器人x,y,z3 個方向的誤差向量;ωij= [ωxij ωyij ωzij]T,表示結構參數和非結構參數有關的轉角補償系數。誤差補償函數E(θ)是關節轉角與末端坐標誤差的函數表達式。

圖3 坐標轉換示意圖Fig. 3 Coordinate conversion relationship
如圖3 所示,利用激光跟蹤儀測量機器人末端坐標的笛卡爾坐標值PMT,在理想結構參數與運動學模型獲得機器人的理論末端坐標值PST。采用RANSAC 快速轉換算法獲得坐標轉換矩陣PSM[19]。單點位置誤差表示為:

在采用式(12)進行預測時,需要對平衡系數c,允許誤差ε,以及高斯核函數σ進行選擇。隨著c的增加,訓練時間變長,訓練樣本集的標準均方差成反比例函數減小。高斯核函數σ越小,標準均方差越小。隨著允許誤差的減小,被考慮的樣本減少,標準均方差增大。綜合考慮,最終選定平衡系數c=100,允許誤差ε=0. 2,高斯核函數σ=2。
5 空間網格劃分
為提高SVR 模型的訓練精度,降低非結構參數的影響,需要對機器人工作空間進行劃分。網格劃分的好壞會直接影響機器人標定的精度與速度。如圖4 所示,網格劃分按照機器人末端位置區域進行形狀大小的分類。網格的大小與標定結果在一定范圍內成反比,網格越小,給實際操作帶來了很大的難度;網格越大,標定結果越差。
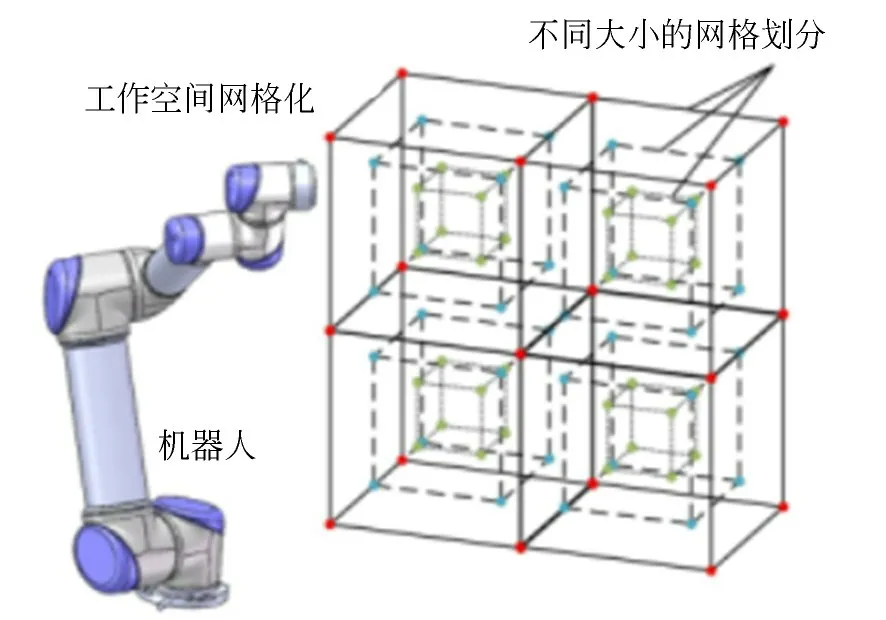
圖4 機器人工作空間網格劃分Fig. 4 Grid division of robot workspace
網格劃分步驟如下:
(1)定義網格屬性,包括形狀和大小。若采用扇形網格劃分方法,結合機器人3 個基礎轉角進行劃分,該方法比較貼合機器人的移動方式。但求解預測誤差是在笛卡爾坐標系中,導致標定效果并不理想。針對上述情況,本文采用如圖4所示的立方體結構,便于最終的誤差修正,且標定效果較好。立方體大小的選擇主要根據所需精度予以決策。根據洪鵬等對網格大小選取的分析[20],本文采用100 mm×100 mm×100 mm 的正立方體結構對UR5 機器人進行網格劃分。
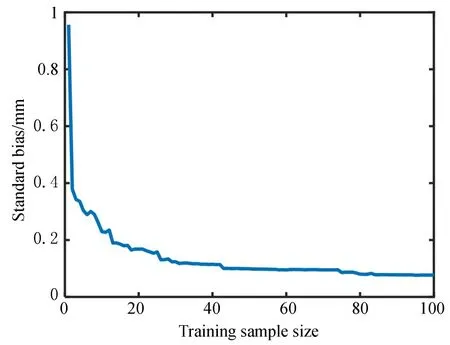
圖5 訓練樣本量與標定精度之間的關系Fig. 5 Relationship between training sample size and accuracy
(2)劃分網格,獲取采樣點集。機器人工作空間是一個球形,網格劃分采用立方體結構,無法覆蓋所有空間,對于邊界空間,盡量減小網格大小,以實現準確修正。在單一網格內,采樣點數量對最終訓練結果的影響結果如圖5 所示。標準偏差在0~10 個采樣區間快速下降,并在10~30 個采樣區間出現拐點,對誤差的修正效果趨于平穩。在保證訓練結果的前提下,采用較少的訓練樣本可以減小采樣難度,也避免發生過擬合。因此,選擇20 個點為單一網格的采樣數目。
6 實驗結果及分析
如圖6 所示,采用U R 5 機器人作為研究對象,并利用A P I T racker T 3 激光跟蹤儀作為測量儀器,其測角精度為± 3. 5 μm /m,測長精度為±0. 5 μm/m。 UR5 機器人的關節轉角Θ=[θ1,θ2,…,θm]T,θ∈R6,作 為 自 變 量 輸 入 模 型 。因變量分別為機器人末端x,y,z3 個方向的誤差值。

圖6 UR5 機器人與激光跟蹤儀實驗裝置Fig. 6 UR5 robot and laser tracker experimental setup
如圖7 所示,機器人臂長的20%~80% 區域作為中心位置,80%~100% 區域作為邊緣位置,劃分邊長為100 mm 的正立方體,每個網格內隨機運動采樣120 個點,其中20 個點作為訓練樣本。按照第4 節所述方法,獲得誤差值作為模型的因變量,對SVR 模型訓練,以確定式(8)中的參數α,α*和b。 不同位置的預測結果如圖8 所示,x,y,z3 個方向的原始位置誤差和預測模型結果基本重合,并計算兩者相關系數的均值為0. 944,均趨近于1,表明訓練效果較好。
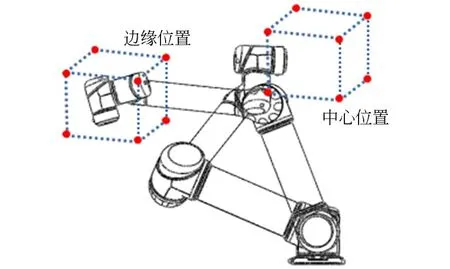
圖7 UR5 機器人采樣位置選擇Fig. 7 Selection of UR5 robot sampling position
其余100 個采樣點作為驗證,評價SVR 的系數擬合結果。采用驗證樣本進行驗證,并隨機抽取50 個點進行觀察,得到如圖9 所示的驗證結果。由圖9 可知,不同位置的驗證結果和原始誤差的重合度較好。
為了驗證已提出方法的優勢,與LM 算法進行比較,結果如表1 所示。圖10 為不同位置修正前后絕對距離誤差示意圖。結果表明,機器人末端位置不同,會造成原始誤差分布不同,但定位精度均有明顯提高,且效果優于LM 算法。

圖8 不同位置的訓練結果Fig. 8 Training results at different positions


圖9 不同位置的驗證結果Fig. 9 Verification results at different positions

圖10 不同方法的絕對定位精度對比Fig. 10 Comparison of absolute accuracy between different methods

表1 不同方法的補償效果Tab. 1 Compensation effects of methods at different positions (mm)
7 結 論
結構參數誤差和非結構參數誤差是影響機器人末端單點定位精度的重要因素。本文采用SVR,同步考量結構參數誤差與非結構參數誤差。通過機器人轉角與末端絕對定位誤差的高維擬合,建立兩者之間的直接聯系,實現了位置誤差的預測與修正。實驗結果表明,將機器人中心位置與邊緣位置分別從2. 107 mm 和2. 182 mm,修正到0. 103 mm 和0. 123 mm,有效地提高了機器人的絕對定位精度。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
哲學評論(2021年2期)2021-08-22 01:53:34
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
現代企業(2015年9期)2015-02-28 18:56:50