風(fēng)云三號D 星紅外高光譜大氣探測儀零光程差檢測
2021-01-12 08:35:16邵春沅顧明劍漆成莉吳春強(qiáng)
光學(xué)精密工程 2020年12期
邵春沅,顧明劍*,漆成莉,吳春強(qiáng)
(1. 中國科學(xué)院 上海技術(shù)物理研究所 中國科學(xué)院紅外探測與成像重點實驗室,上海200083;2. 國家衛(wèi)星氣象中心 中國遙感衛(wèi)星輻射測量和定標(biāo)重點開放實驗室,北京100081)
1 引 言
我國第二代極軌氣象衛(wèi)星風(fēng)云三號D 星于2017 年11 月15 日成功發(fā)射,首次裝載了紅外高光譜大氣探測儀(High-spectral Resolution Infrared Atmospheric Sounder,HIRAS)。 HIRAS 在3. 92~15. 38 μm 光譜范圍內(nèi)對大氣輻射進(jìn)行高光譜分辨率垂直探測,在大氣溫濕度廓線反演、數(shù)值天氣預(yù)報、氣候變化研究以及大氣痕量氣體探測等方面發(fā)揮著重要作用。
HIRAS 采用跨軌掃描觀測,對同一目標(biāo)位置駐留觀測的干涉圖進(jìn)行平均處理,從而可以有效提高儀器的信噪比。平均前必須將所有干涉圖的零光程差位置對齊。它是干涉圖疊加的基準(zhǔn)點和傅里葉變換的中心點。同時,復(fù)數(shù)輻射定標(biāo)方法需要星上黑體、冷空間和目標(biāo)場景的相位保持一致,三者對應(yīng)于同一零光程差位置。 因此,干涉圖零光程差檢測是紅外高光譜大氣探測儀數(shù)據(jù)預(yù)處理的關(guān)鍵步驟,是儀器輻射和光譜定標(biāo)的前提。理想干涉圖的最大值點即為零光程差位置,干涉圖關(guān)于零光程點左右對稱。但是實際儀器由于受到儀器自身輻射、讀出電路噪聲、光學(xué)色散、采樣延遲等因素的影響[1-2],輸出的干涉圖往往不對稱,從而無法根據(jù)干涉圖的最大值判斷零光程位置。對于星載儀器,還需考慮空間環(huán)境和衛(wèi)星平臺。太空失重的作用會使動鏡系統(tǒng)往復(fù)運動所圍繞的起始點產(chǎn)生微小的位移。空間環(huán)境溫度變化引起的定鏡失準(zhǔn)直也會導(dǎo)致兩束干涉光的零光程位置變化。星上飛輪、掃描機(jī)構(gòu)、機(jī)械制冷機(jī)等多個振動源在光程差上疊加了震動帶來的周期性變化量。本文通過最大相關(guān)法和復(fù)數(shù)定標(biāo)虛部光譜最小法來確定各個干涉圖的零光程差點,為進(jìn)一步的光譜反演提供保障。
2 紅外高光譜大氣探測儀工作原理
HIRAS 對地觀測時進(jìn)行跨軌掃描,共觀測29 個駐留視場,每天覆蓋全球兩次。在軌工作模式如圖1 所示:掃描鏡在階段1 用小于750 ms 時間從星上黑體定標(biāo)源到冷空間位置,并保持500 ms 以上,進(jìn)行兩個160 ms 的探測;在階段2 用小于250 ms 的時間從冷空間位置到掃描起始點位置,并保持250 ms 以上,進(jìn)行一個160 ms 的探測;在階段3 進(jìn)行3. 6°的步進(jìn)掃描,周期為一個動鏡半周期時間,即250 ms,然后用小于90 ms 的時間走到步進(jìn)位置,進(jìn)行大于160 ms 的位置保持,同時探測;階段4 用小于一個動鏡半周期的時間從步進(jìn)掃描最后一步到星上內(nèi)黑體定標(biāo)源位置,并進(jìn)行大于兩個動鏡半周期的位置保持及兩個160 ms 的探測。因此,掃描鏡每次掃描360°,包含29 個對地駐留觀測,2 個星上黑體觀測和2 個冷空間觀測。

圖1 HIRAS 的掃描工作模式Fig. 1 Scanning mode of HIRAS
HIRAS 分為3 個紅外工作波段(長波、中波1、中波2),每個波段對應(yīng)一個2×2 像元的小面陣探測器,每一個探測像元對地觀測張角為1. 1°,對應(yīng)星下點地面分辨率約為16 km。各個波段的特征參數(shù)如表1 所示。
HIRAS 采用干涉分光方式,其本質(zhì)是邁克爾遜干涉儀,核心部件主要包括定鏡、動鏡和分束器等,如圖2 所示[3]。入射光經(jīng)過分束器,分光成為兩束光,其中一束被分束器反射,稱為光束1;另一束直接透射,形成光束2。它們分別經(jīng)過定鏡和動鏡的反射,再一次返回到分束器,并且每一束又分別經(jīng)過分束器的透射和反射,最終在探測器上發(fā)生干涉。隨著動鏡的循環(huán)往復(fù)運動,兩束干涉光的光程差不斷變化,形成干涉信號[4]。干涉信號經(jīng)過光電轉(zhuǎn)換為電信號,經(jīng)過電子學(xué)系統(tǒng)處理,再由AD 轉(zhuǎn)換得到數(shù)字化的干涉圖,然后通過傅里葉變換反演得到光譜。入射光譜和干涉信號的關(guān)系如下[5]:

表1 紅外高光譜探測器的波段特性參數(shù)Tab. 1 Parameters for system scale calibration of HIRAS


圖2 HIRAS 原理示意圖[3]Fig. 2 Schematic diagram of HIRAS[3]
其中:v 為波數(shù),x 為光程差。可以看出,干涉信號I ( x ) 和入射光譜B( v ) 是一對傅里葉變換,在零光程差位置時干涉信號達(dá)到最大,為入射光譜在波段范圍內(nèi)的積分,即:

因此,理論上可通過檢測干涉信號的最大值來檢測零光程差。但實際檢測還受到以下幾方面的影響:
(1)目標(biāo)場景變化和噪聲
當(dāng)目標(biāo)輻射能量較弱(尤其是在中波2 波段)甚至只有一些分立的譜線時,干涉信號峰值零光程差點就不明顯。另一方面,儀器自身輻射主要來自干涉儀后的光學(xué)組件(望遠(yuǎn)鏡、后光路等)輻射,這一輻射經(jīng)過干涉儀方向與入射輻射相反,即存在近似180°的相位差。當(dāng)兩者能量接近時,干涉圖零光程點的幅度小于周邊次峰,甚至被噪聲淹沒,則無法根據(jù)干涉圖的最大值檢測零光程位置。對地目標(biāo)受大氣吸收影響,大部分都在等效黑體溫度290 K 以下。
(2)儀器采樣誤差
采樣電路觸發(fā)信號與激光參考信號過零點的延遲失配和采樣信號自身的抖動,均會導(dǎo)致采樣點位置偏離真實的零光程位置。
(3)參考激光條紋計數(shù)錯誤
傅里葉光譜儀采用參考激光的干涉信號進(jìn)行等光程采樣。采樣在干涉儀動境運動的任意時刻都可能發(fā)生。 首先,可能發(fā)生在動境轉(zhuǎn)向時,隨后的干涉圖采樣點移動n 個采樣點,是可以被校正的。其次,發(fā)生在動境運動過程中的計數(shù)錯誤可分為兩類:一種是條紋計數(shù)丟失后的干涉圖采樣相對原始干涉圖采樣產(chǎn)生偏移,這會導(dǎo)致當(dāng)前干涉圖出現(xiàn)難以恢復(fù)的錯誤;第二種是當(dāng)前干涉圖相對原始干涉圖出現(xiàn)整體偏移,與動境轉(zhuǎn)向時條紋計數(shù)丟失的情況類似,是可以被校正的。
3 輻射定標(biāo)
傅里葉光譜儀通過干涉分光觀測大氣輻射,獲取的不是直接目標(biāo)光譜,而是干涉圖,需要通過光譜反演獲得定標(biāo)光譜,包括干涉圖的預(yù)處理、傅里葉變換、輻射定標(biāo)、光譜定標(biāo)[6]等。HIRAS 的輻射定標(biāo)就是通過建立數(shù)學(xué)模型,描述干涉圖快速傅里葉變換(Fast Fourier Transform,F(xiàn)FT)得到的光譜與投射到探測儀入射光瞳內(nèi)的輻射量之間的關(guān)系。輻射定標(biāo)需要已知的輻射源作為基準(zhǔn),在星上通常使用黑體和冷空分別作為高、低溫場景的標(biāo)準(zhǔn)輻射源。黑體輻射由普朗克公式給出:

其中:v是波數(shù),T是黑體溫度,第一輻射常數(shù)C1= 1.191 062 × 10-12W · cm2,第 二 輻 射 常 數(shù)C2= 1.438 786 cm · K,L(v,T) 是 光 譜 輻 亮 度 。理想的干涉圖零光程差位置是干涉圖的最大值,且關(guān)于零光程點是對稱的,通過傅里葉變換獲得實數(shù)光譜。但實際中由于光學(xué)系統(tǒng)的非理想反射鏡、透鏡、分束器以及電子學(xué)系統(tǒng)放大、濾波、采樣等因素的影響,干涉圖往往不對稱,得到的復(fù)數(shù)光譜存在相位誤差[7]。
3.1 非理想光學(xué)器件
式(1)在理想狀態(tài)下成立,但實際上分束器和補(bǔ)償器總是存在一定的殘余誤差,兩塊板的厚度不一致,或者厚度相同,存在裝配誤差,從而使得兩支光路所走過的路程不同,導(dǎo)致光信號的色散。式(1)中的光程差變?yōu)椋?/p>

其中:η(v)表示分束器基板材料的折射率,d表示兩塊基板的厚度之差。 相位偏差為2πvη(v)d,存在相位誤差的干涉圖將不再對稱。
3.2 儀器自輻射
儀器自輻射主要來自分束器和干涉儀后端的光學(xué)組件。入射輻射經(jīng)過全光路,而分束器輻射只經(jīng)過部分光路。在空間應(yīng)用中,望遠(yuǎn)鏡往往置于干涉儀后端,如CrIS,IASI,HIRAS 等,這部分光學(xué)系統(tǒng)處于常溫,輻射較大,與入射輻射存在近似相反的相位,有較強(qiáng)的抵消作用。一般的地面光譜儀望遠(yuǎn)鏡前置,與入射輻射光路一致。
3.3 電路的相位誤差
為了防止采樣混疊,提高信號的信噪比,往往要對干涉信號進(jìn)行濾波,需要抗混疊濾波電路在信號帶寬內(nèi)幅度響應(yīng)平坦,而相位特性則要求是線性的。但這樣的濾波器在物理上是無法實現(xiàn)的,實際的濾波器存在相位的非線性,可表示為:

其中G(f)表示所有非線性階次項引入的相位誤差。因此,濾波電路的相位延遲非線性也會引起干涉圖的非對稱性。
等時間采樣由于動鏡速度總有一定的波動,也會使得干涉信號發(fā)生畸變。一般干涉儀均采用等光程差采樣,但采樣時刻相對激光干涉信號的過零點有一段延遲,再加動鏡速度波動或者微振動則會引入采樣誤差。
實際測得的復(fù)光譜一般由兩部分組成:來自入射輻射源的相位和來自儀器自身輻射的異常相位。盡管來自儀器的輻射可能由多個具有不同相位特征的部分組成,它們可以被看作一項。因此,未經(jīng)校正的復(fù)光譜為:

其中:L(v) 為目標(biāo)的入射輻射,L0(v) 為儀器自發(fā)輻射,Φ(v) 為輸入源的相位,Φ0(v) 為儀器自身輻射相位。對于星上黑體和冷空間標(biāo)準(zhǔn)輻射源,其復(fù)數(shù)光譜分別為:

其中Bh(v),Bc(v)分別為星上黑體和冷空間的入射輻射量。
由于冷空的入射輻射幾乎可以忽略,因此冷空光譜基本表征了儀器的自身輻射,星上黑體和觀測目標(biāo)各自減去冷空間標(biāo)準(zhǔn)輻射源的復(fù)數(shù)光譜可得:

根據(jù)式(9)和式(10),可求解獲得觀測目標(biāo)的入射輻射:

通過復(fù)數(shù)定標(biāo)公式解決了非理想干涉圖不對稱的問題,消除了反演光譜相位的影響,但這需要進(jìn)行輻射定標(biāo)的星上黑體、冷空、對地觀測三個干涉圖選定的作為零光程差位置的干涉圖采樣點對應(yīng)同一光程差,否則定標(biāo)誤差會非常大[8]。CrIS 利用白光干涉信號具有明顯峰值的特點來檢測零光程差位置。同時,采用基于光譜殘余相位差的方法糾正參考激光條紋計數(shù)錯誤[9]。IASI 和HIRAS 儀器中沒有相應(yīng)的探測裝置,且HIRAS 的動鏡起始平衡位置并非準(zhǔn)確的零光程差位置,因此需要在數(shù)據(jù)處理中通過軟件方法確定零光程差的位置。IASI[10]在算法中通過在一定范圍內(nèi)搜索采樣點,以定標(biāo)光譜偏離定標(biāo)線的程度來尋找零光程差點。
4 零光程差檢測
4.1 同一目標(biāo)多次觀測的干涉圖對齊
儀器在軌每一次定標(biāo)時需要多次觀測星上黑體和冷空間,獲取多幅內(nèi)黑體和冷空干涉圖。內(nèi)黑體和冷空的反演光譜疊加均值作為定標(biāo)源光譜,以改善信噪比,降低隨機(jī)噪聲波動。在對同一目標(biāo)的多幅光譜進(jìn)行疊加時,相同光程差的采樣點沒有對齊,則光譜反演不一致,疊加之后取均值會出現(xiàn)錯誤。由于儀器采樣起始點存在波動,干涉圖的零光程差位置會發(fā)生較大偏移,圖3 實線和虛線分別為紅外高光譜大氣探測儀在軌觀測同一目標(biāo)(星上黑體)的兩幅干涉圖。

圖3 兩次觀測的星上黑體干涉圖零光程差偏移Fig. 3 Two blackbody interferograms with shifted zero optical path difference
雖然星上黑體和冷空的干涉圖大多具有明顯的峰值,圖3 所示的情況一般可選取幅度峰值作為零光程差位置進(jìn)行對齊,但仍然存在一些特殊情況,選擇最大值點會出現(xiàn)錯誤,導(dǎo)致干涉圖無法對齊,如圖4 所示。

圖4 峰值作為零光程差采樣點的干涉圖Fig. 4 Interferogram with peaks as zero optical path difference
由于干涉圖的兩個最大采樣點在真實的零光程差兩側(cè)近似對稱,不同次的觀測峰值可能在前后不同位置,則選取峰值無法對齊同一目標(biāo)的多幅干涉圖。這里采用最大相關(guān)法進(jìn)行對齊,每次選取其中一幅干涉圖作為標(biāo)準(zhǔn)干涉圖,以其峰值作為零光程差點,對其他的干涉圖先取峰值作為對齊中心,與標(biāo)準(zhǔn)干涉圖做相關(guān),然后在峰值左右各一定采樣點范圍內(nèi)進(jìn)行搜索,找到一個采樣點并以它為對齊中心,它和標(biāo)準(zhǔn)干涉圖的相關(guān)系數(shù)最大,以該采樣點為該干涉圖的零光程差點進(jìn)行對齊。
4.2 不同目標(biāo)零光程差檢測
由式(9)可知,復(fù)數(shù)輻射定標(biāo)的前提是星上黑體、冷空和目標(biāo)三者對應(yīng)于同一零光程差位置。由于冷空入射能量接近于零,且儀器自身輻射主要來自中后繼光學(xué)系統(tǒng),與入射光存在π 的相位差[11],因此冷空與星上黑體的干涉圖反向,經(jīng)過傅里葉變換后的復(fù)數(shù)光譜相位也相差π。圖5 和圖6 的在軌實測數(shù)據(jù)也驗證了理論分析結(jié)果。所以用能量強(qiáng)、峰值明顯的星上黑體作為標(biāo)準(zhǔn),以它的峰值位置直接作為零光程差點,然后對冷空的零光程差進(jìn)行定位。先找到冷空干涉圖的峰值,在峰值附近一定范圍內(nèi)移動冷空的零光程差位置,經(jīng)過FFT 獲得光譜,計算相位并與星上黑體的相位譜進(jìn)行比較,不斷移動,迭代計算,兩者相位差最接近π 時即為零光程差點。
在完成星上黑體和冷空的零光程差檢測之后,再對目標(biāo)干涉圖進(jìn)行檢測。如果目標(biāo)和定標(biāo)源之間的零光程差定位出現(xiàn)偏移,存在相位差α(v),則它的復(fù)數(shù)光譜為[12]:

目標(biāo)和星上黑體、冷空間的零光程差點定位準(zhǔn)確一致時,α(v)接近于零,虛部光譜很小,僅表征了儀器噪聲。若存在定位偏差,則經(jīng)過定標(biāo)之后的光譜會產(chǎn)生較大的虛部,如圖5~圖7 所示。從圖5 可以看出,目標(biāo)干涉圖負(fù)向的最大值大于實際零光程差點,僅用峰值檢測引起了定位上的錯誤。因此,目標(biāo)光譜和星上黑體譜分別減去冷空光譜存在較大的相位差,經(jīng)過定標(biāo)之后存在很大的虛部。

圖5 零光程差偏移的目標(biāo)、星上黑體及冷空間干涉圖Fig. 5 Interferograms of scene, blackbody and cold space with shifted zero optical path difference

圖6 零光程差偏移的目標(biāo)、星上黑體及冷空間相位譜Fig. 6 Phase of scene,blackbody and cold space with shifted zero optical path difference

圖7 零光程差偏移的定標(biāo)光譜實部和虛部Fig. 7 Real and imaginary parts of calibration spectra with shifted zero optical path difference
根據(jù)定標(biāo)光譜虛部的大小,通過在干涉圖峰值左右兩邊一定范圍內(nèi)搜索,找到一個中心點,使得經(jīng)過FFT 變換和輻射定標(biāo)之后的目標(biāo)光譜虛部最小,即為零光程差點,具體的算法流程如圖8 所示。
圖9~圖11 為通過該方法檢測之后的結(jié)果。可以看出,星上黑體、冷空和對地觀測的零光程差點定位準(zhǔn)確,星上黑體和對地目標(biāo)減去冷空之后FFT 變換的相位譜基本重合,消除了之前的異常相位。圖10 的定標(biāo)光譜虛部也基本在零附近,與理論分析相符合。
由于地物場景復(fù)雜多變,中波1 和中波2 干涉圖隨輻射能量變化劇烈,再加上儀器自發(fā)輻射的抵消作用,真實零光程差位置的幅度可能很小,與干涉圖峰值距離較遠(yuǎn)。為了減小搜索范圍和運算量,每次都是由一個激光過零采樣信號對3 個波段12 個像元同步進(jìn)行采樣,所以該檢測方法在不敏感的長波波段(650~1 135 cm-1)進(jìn)行,同一次觀測目標(biāo)的3 個波段干涉圖零光程點均以長波為準(zhǔn)。

圖8 基于最小虛部的零光程差檢測基本流程Fig. 8 Flowchart of zero optical path difference detection based on minimum imaginary part
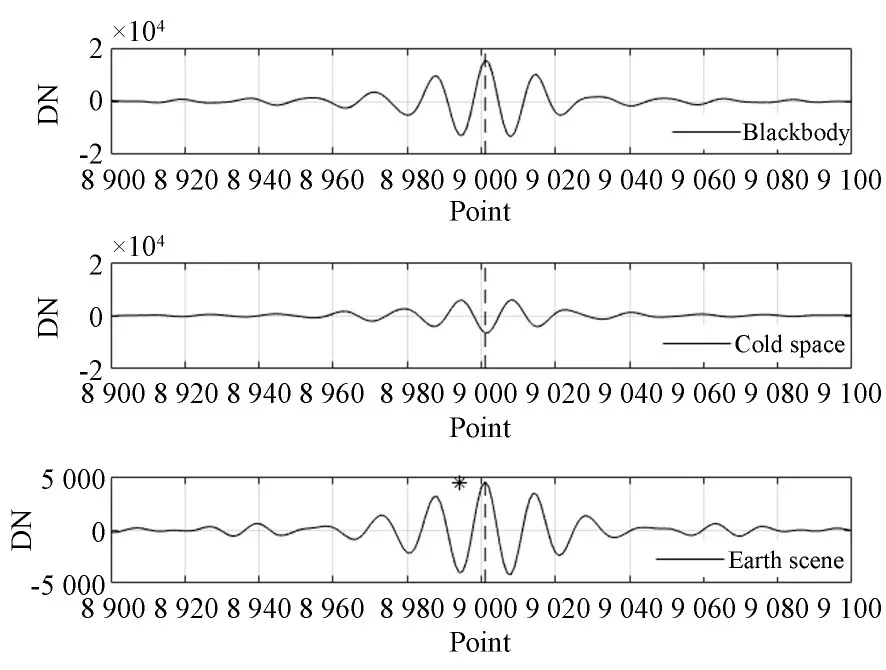
圖9 零光程差一致的目標(biāo)、星上黑體和冷空間干涉圖Fig. 9 Interferograms of scene,blackbody and cold space with corrected zero optical path difference

圖10 零光程差一致的目標(biāo)、星上黑體和冷空間相位譜Fig. 10 Phase of scene,blackbody and cold space with corrected zero optical path difference

圖11 零光程差一致的定標(biāo)光譜實部和虛部Fig. 11 Real and imaginary parts of calibration spectra with corrected zero optical path difference
5 結(jié) 論
干涉圖零光程差點是傅里葉變換的中心,對光譜的反演具有重要影響。它的定位偏差會造成同一觀測目標(biāo)的干涉圖疊加錯誤,同時也會在輻射定標(biāo)過程中引入額外的殘余相位,增大光譜虛部,導(dǎo)致定標(biāo)結(jié)果錯誤。本文根據(jù)同一駐留位置觀測干涉圖的相關(guān)性,對齊同一目標(biāo)的多幅干涉圖。以定標(biāo)光譜虛部最小為判斷依據(jù),通過移動零光程位置,多次迭代尋找真實零光程差點。利用風(fēng)云三號D 星HIRAS 的在軌數(shù)據(jù)進(jìn)行了測試和驗證,結(jié)果表明該方法可以快速有效檢測零光程差的位置,具有良好的應(yīng)用效果。