基于Kalman濾波和LQG控制的主動懸架系統容錯控制研究
2021-01-12 09:07:56王玉蓉張海龍王恩榮
南京師范大學學報(工程技術版) 2020年4期
王玉蓉,張海龍,王恩榮
(南京師范大學南瑞電氣與自動化學院,江蘇 南京 210023)
汽車作為現代出行必要的代步工具,其內在性能受到了人們很高的關注,尤其是舒適性和安全性兩方面,這主要由懸架系統性能來決定[1]. 因為被動懸架參數固定、運行時狀態無法調節,難以滿足車輛綜合懸架性能要求,繼而發展出新型可控懸架系統. 根據行駛狀態和路面狀況自適應調節,可最大限度地滿足車輛運行中對舒適性和安全性的折中需求,包括半主動和主動懸架兩類[2]. 振動加速度傳感器通過測量懸架的運行狀態,用于主動控制器的設計,然而在行駛過程中主動懸架遇到元器件或環境電磁干擾的問題,均會導致傳感器輸出故障,甚至會造成控制器失效,從而影響乘客的乘坐舒適性甚至危及乘客的安全.
目前眾多學者對故障下的主動懸架容錯控制方法開展了廣泛的研究,主要針對執行器和傳感器發生故障的情況. 楊柳青等[3]在傳感器故障下設計了自適應故障估計系統,提出一種基于傳感器信號重構的主動容錯控制方法,有效地估計傳感器故障值,提高了懸架性能和控制品質,并具有良好的控制魯棒性. 陳雙等[4]設計了卡爾曼濾波器對懸架進行狀態估計. 在作動器發生故障的情況下,基于故障增益對LQG控制率進行實時補償,提高了主動懸架的可靠性. 張裊娜等[5]建立了懸架系統定性與定量結合的統一模型,針對未知輸入設計了未知輸入觀測器并提出對故障和狀態解耦的方法,仿真結果表明該方法能夠有效觀測懸架故障與狀態. Zhang等[6]提出了一種可以反映自適應調節律的滑模觀測器,能夠對叉車系統傳感器故障進行檢測和信號重構,同時設計了滑模容錯控制器,有效提高了故障發生時叉車系統運行安全性. Lin等[7]設計了比例差動滑模觀測器來實現傳感器和執行器的故障重構,提出了一種基于非線性控制理論的四輪車輛主動懸架系統的容錯控制方法,提高了故障下車輛運行穩定性.
本文基于文獻[8]提供的加權系數,結合Kalman濾波算法與最優控制理論設計了LQG控制器. 建立二自由度懸架狀態空間模型以及故障模型,通過對比分析諧波激勵、平滑脈沖和隨機路面譜典型激勵下主動懸架在傳感器未發生故障、傳感器發生故障下無容錯控制以及傳感器發生故障下有容錯控制的綜合懸架性能,仿真驗證LQG控制器對綜合懸架性能的效果.
1 懸架系統模型建立
1.1 懸架動力學模型
如圖1,為二自由度主動懸架模型[4]. 設xs為簧載位移;xu為非簧載位移;xi為路面激勵位移;ms為簧載質量;mu為非簧載質量;kt為輪胎剛度系數;ks為彈簧剛度系數;cs為懸架阻尼系數;Fa為懸架主動控制力.
上述二自由度的主動懸架運動微分方程為
(1)

其狀態空間表達式為
(2)
式中,方程中的各系數矩陣為
1.2 故障懸架模型
本文只考慮傳感器故障的情況,其對應量測輸出可表示為以下形式:
yf=αy+ε.
(3)
式中:yf,y分別為傳感器故障輸出值和實際輸出值;α為傳感器故障增益的系數;ε為傳感器卡死或恒偏差的值.
當α∈(0,1),ε=0時,傳感器發生增益故障;當α=1,ε≠0時,發生恒偏差為ε的故障;當α=0,y=ε時發生卡死故障. 傳感器在發生上述故障時懸架系統的輸出為
Yf=αY+ε=Y+(α-1)Y+ε=CfX+Ff+v.
(4)
式中,Cf為輸出矩陣,F為傳感器故障矢量,f為傳感器故障值向量,其值為(α-1)Y+ε,v為干擾向量.
故障懸架模型狀態方程為:
(5)
式中,A,B,C,D,G為適維懸架系統參數矩陣.
2 車輛主動懸架容錯控制器設計
2.1 LQG控制器設計
LQG主動懸架的評價指標泛函J定義為時域T內簧載質量加速度、懸架動行程、簧載質量速度、輪胎動位移、非簧載質量速度的加權平方和的積分值[9-10]. 表達式如下:
(6)
式中,ρ1、ρ2、ρ3、ρ4分別為評價指標的權重系數.
二次函數積分型表達式如下:
(7)
式中,
根據極值定理,在任意t時刻都能夠求出懸架的最優控制力U(t):
U(t)=-R-1BTPX(t)=-KX(t).
(8)
式中,K為增益矩陣;P可由Riccati方程求得[11-12],方程式如下:
(A-BR-1N)TP+P(A-BR-1N)+(Q-NTR-1N)-PBR-1BTP=0.
(9)
2.2 基于Kalman濾波的故障狀態觀測器
卡爾曼濾波根據系統狀態可分為預測部分和校正部分. 預測部分是依據前一時刻的狀態值得到該時刻先驗估計的部分,校正部分是結合測量和預測得到后驗估計的部分[13].
主動懸架的狀態方程和量測方程如下:
(10)
式中,x(k)、x(k-1)分別為k與k-1時刻的狀態矢量;y(k)為k時刻的測量值,u(k)為k時刻的測量噪聲;w(k)為k時刻的過程噪聲.
由于系統呈線性,且系統噪聲呈高斯分布,容易得到此算法的預測和校正方程[14].
(1)預測部分
狀態預測:
(11)
誤差預測:
P(k|k-1)=AP(k-1|k-1)AT+Q(k).
(12)
(2)校正部分
增益方程:
(13)
濾波方程:
x(k|k)=x(k-1|k-1)+kg(k)[y(k)-C·x(k|k-1)].
(14)
誤差更新:
P(k|k)=[I-kg(k)·C]P(k|k-1).
(15)
當傳感器發生故障時,結合式(5)得到傳感器故障下狀態誤差和輸出殘差方程為:
(16)
(17)
在加速度傳感器發生故障時,能夠對簧載質量加速度,非簧載質量加速度、懸架動撓度以及輪胎動載荷進行狀態估計,并與實際輸出比較獲得殘差,針對故障診斷的結果對懸架主動力進行故障補償.
3 車輛主動懸架模型的仿真分析
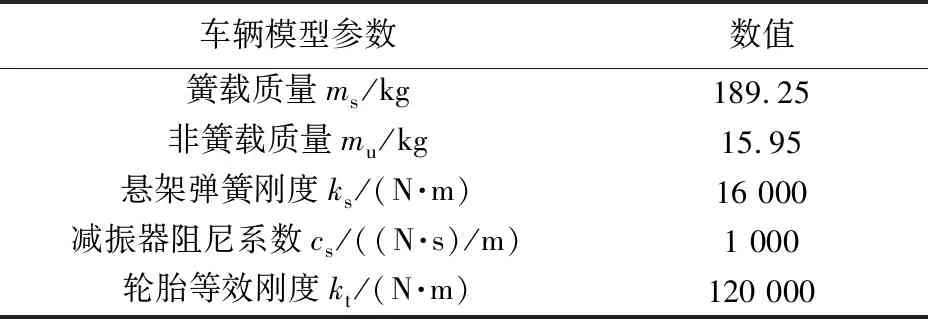
表1 二自由度車輛模型參數Table 1 Parameters of 2-DOF vehicle model
主動懸架系統參數如表1,當Fa為零時為被動懸架系統.
3.1 諧波激勵響應
本文采用分段諧波激勵信號,在高頻時能夠限制位移諧波信號幅值,如式(18)所示.
(18)
式中,am表示諧波激勵信號的幅值,選為2.5 cm,f為諧波激勵信號的頻率,選為0~20 Hz,fT為諧波激勵信號的轉折頻率,選為2.1 Hz.
無故障主動控制(active control,Active)、故障下無容錯控制(no fault-tolerant control,NFTC)以及故障下有容錯控制(fault-tolerant control,FTC)的主動懸架在諧波激勵下的頻域響應如圖3所示. 懸架系統的評價指標主要有簧載質量加速度傳輸率Tas,非簧載質量加速度傳輸率Tau,懸架動行程傳輸率Tdr以及輪胎動載荷系數[15]. 從圖3中,可以看出FTC的加速度傳輸率以及動行程傳輸率和Active幾乎一致,NFTC加速度傳輸率以及動行程傳輸率均明顯增加,并且FTC的動載荷較Active有所增加. 在低頻時FTC的Tas,Tau和Tdr的峰值較NFTC分別減少了32.3%,33.3%和30.7%,此時簧載質量共振頻率大約為1.5 Hz,同時DLC的峰值明顯增加,因此可以看出明顯改善了簧載質量共振抑制的懸架性能. 在3~8 Hz的中間頻域內,Active的Tas的大小明顯降低,而DLC的大小有所升高,此時懸架的平順性有所降低,而安全性有所提高. 總之,在頻域范圍0~20 Hz內,NFTC安全性能降低,FTC乘坐舒適性雖然有所降低,但是安全性顯著提高,很好地改善了懸架的綜合懸架性能.
圖4給出了共振頻率諧波激勵下的Active、NFTC與FTC懸架性能時域比較,可以看出在諧波激勵下傳感器故障時NFTC簧載質量加速度as,非簧載質量加速度au、懸架動行程xr以及輪胎動態力Ft較Active明顯增大,對懸架性能影響很大,尤其是安全性能無法保證. FTC的as、au、xr能幾乎恢復到Active情況,有效的提高了車輛行駛的乘坐舒適性以及限制了懸架動行程,并且Ft較Active還是有所下降,一定程度上延長了輪胎使用周期.
3.2 平滑脈沖響應
車輛運行中的路面沖擊會產生強烈振動影響,采用平滑脈沖信號作為激勵,該激勵信號由式(19)給出
xi=0.25ame2(μω0t)2e-μω0tu(t).
(19)
式中,am是該信號的幅值,ω0是基波頻率,μ是脈沖剛度[16],在本文中選擇am=2.0 cm,ω0=10.4 rad/s,μ=3.
Active、NFTC以及FTC在平滑脈沖激勵下的時域暫態響應對比如圖5所示,選擇簧載加速度as,非簧載加速度au,懸架動行程xr以及輪胎動態力Ft作為評價懸架性能的指標,可以看出NFTC的as,au,xr的暫態調節時間較Active變化不大,但峰值明顯升高. 而FTC能快速恢復到無故障的情況,同時Ft最大值也快速地增大,有效地改善了系統的操控性.
3.3 實測路面譜響應
隨機路面激勵通常模擬真實的路面狀況來評價車輛懸架性能. 在車速為20 m/s,路面等級為C級的實測路面譜激勵下[17],對比分析Active、NFTC和FTC懸架響應的功率譜密度. 如圖6所示,可以看出在第一共振點附近,FTC和Active的as功率譜密度較NFTC明顯降低,有效提升駕乘舒適性,在第二共振點附近,FTC的au,xr的功率譜密度大小較NFTC有所增加,增加了車輛抓地性能,提升了懸架系統操控穩定性.
4 結論
本文對傳感器故障下的兩自由度主動懸架進行研究,基于Kalman濾波和最優控制理論設計了一種LQG主動容錯控制器,在諧波激勵、沖擊性路面輸入和實測路面譜激勵輸入下對無故障、故障下無容錯控制以及故障下有容錯控制的主動懸架進行仿真分析. 結果表明,加入容錯控制的主動懸架能夠確保加速度傳感器故障下的平順性以及安全性,該研究為接下來開展磁流變半主動懸架容錯控制奠定基礎.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50